Alligood K., Sauer T., Yorke J.A. Chaos: An Introduction to Dynamical Systems
Подождите немного. Документ загружается.

T WO-DIMENSIONAL M APS
2.5
⫺2.5
01.25
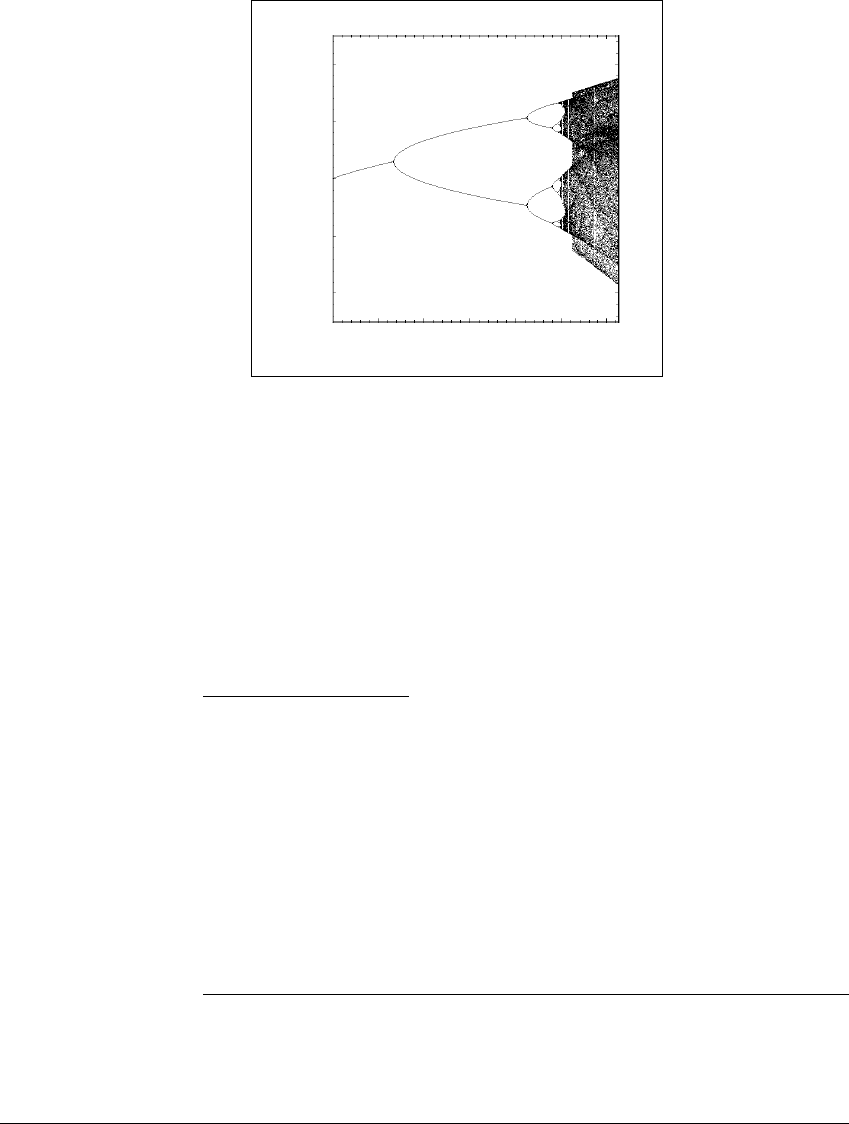
Figure 2.16 Bifurcation diagram for the H
´
enon map,
b
ⴝ 0
.
4.
Each vertical slice shows the projection onto the x-axis of an attractor for the map
for a fixed value of the parameter a.
2.15 is recapitulated here. At a ⫽ 0.27, a period-doubling bifurcation occurs,
when the fixed point loses stability and a period-two orbit is born. The period-
two orbit is a sink until a ⫽ 0.85, when it too doubles its period. In the next
exercise, you will be asked to use the equations we developed here to verify some
of these facts.
✎ E XERCISE T2.7
Set b ⫽ 0.4.
(a) Prove that for ⫺0.09 ⬍ a ⬍ 0.27, the H
´
enon map f has one sink
fixed point and one saddle fixed point.
(b) Find the largest magnitude eigenvalue of the Jacobian matrix at
the first fixed point when a ⫽ 0.27. Explain the loss of stability of the sink.
(c) Prove that for 0.27 ⬍ a ⬍ 0.85, f has a period-two sink.
(d) Find the largest magnitude eigenvalue of Df
2
, the Jacobian of f
2
at the period-two orbit, when a ⫽ 0.85.
For b ⫽ 0.4anda ⬎ 0.85, the attractors of the H
´
enon map become more
complex. When the period-two orbit becomes unstable, it is immediately replaced
with an attracting period-four orbit, then a period-eight orbit, etc. Figure 2.17
74

2.5 NONLINEAR M APS AND THE J ACOBIAN M ATRIX
Figure 2.17 Attractors for the H
´
enon map with
b
ⴝ 0
.
4.
Each panel displays a single attracting orbit for a particular value of the parameter
a.(a)a ⫽ 0.9, period 4 sink. (b) a ⫽ 0.988, period 16 sink. (c) a ⫽ 1.0, four-piece
attractor. (d) a ⫽ 1.0293, period-ten sink. (e) a ⫽ 1.045, two-piece attractor. The
points of an orbit alternate between the pieces. (f) a ⫽ 1.2, two pieces have merged
to form one-piece attractor.
75

T WO-DIMENSIONAL M APS
shows a number of these attractors. An example is the “period-ten window” at
a ⫽ 1.0293, barely detectable as a vertical white gap in Figure 2.16.
➮ COMPUTER EXPERIMENT 2.2
Make a bifurcation diagram like Figure 2.16, but for b ⫽⫺0.3, and for
0 ⱕ a ⱕ 2.2. For each a, choose the initial point (0, 0) and calculate its orbit.
Plot the x-coordinates of the orbit, starting with iterate 101 (to allow time for the
orbit to approximately settle down to the attracting orbit). Questions to answer:
Does the resulting bifurcation diagram depend on the choice of initial point? How
is the picture different if the y-coordinates are plotted instead?
Periodic points are the key to many of the properties of a map. For example,
trajectories often converge to a periodic sink. Periodic saddles and sources, on the
other hand, do not attract open neighborhoods of initial values as sinks do, but
are important in their own ways, as will be seen in later chapters.
Remark 2.15 The theme of this section has been the use of the Jacobian
matrix for determining stability of periodic orbits of nonlinear maps, in the way
that the map matrix itself is used for linear maps. There are other important
uses for the Jacobian matrix. The magnitude of its determinant measures the
transformation of areas for nonlinear maps, at least locally.
For example, consider the H
´
enon map (2.27). The determinant of the
Jacobian matrix (2.28) is fixed at ⫺b for all v. For the case a ⫽ 0,b ⫽ 0.4, the
map f transforms area near each point v at the rate |det(Df(v))| ⫽ | ⫺ b| ⫽ 0.4.
Each plane region is transformed by f into a region that is 40% of its original size.
The circle around each fixed point in Figure 2.9, for example, has forward images
which are .4 ⫽ 40% and (.4)
2
⫽ .16 ⫽ 16%, respectively.
Most of the plane maps we will deal with are invertible, meaning that their
inverses exist.
Definition 2.16 Amapf on ⺢
m
is one-to-one if f(v
1
) ⫽ f(v
2
) implies
v
1
⫽ v
2
.
Recall that functions are well-defined by definition, i.e. v
1
⫽ v
2
implies
f(v
1
) ⫽ f(v
2
). Two points do not get mapped together under a one-to-one map.
It follows that if f is a one-to-one map, then its inverse map f
⫺1
is a function. The
76
2.5 NONLINEAR M APS AND THE J ACOBIAN M ATRIX
INVERSE MAPS
A function is a uniquely-defined assignment of a range point for each
domain point. (If the domain and range are the same set, we call the
function a map.) Several domain points may map to the same range
point. For f
1
(x, y) ⫽ (x
2
,y
2
), the points (2, 2), (2, ⫺2), (⫺2, 2) and
(⫺2, ⫺2) all map to (4, 4). On the other hand, for f
2
(x, y) ⫽ (x
3
,y
3
),
this never happens. A point (a, b) is the image of (a
1 3
,b
1 3
)only.
Thus f
2
is a one-to-one map, and f
1
is not.
An inverse map f
⫺1
automatically exists for any one-to-one map f.
The domain of f
⫺1
is the image of f. For the example f
2
(x, y) ⫽
(x
3
,y
3
), the inverse is f
⫺1
2
(x, y) ⫽ (x
1 3
,y
1 3
).
To compute an inverse map, set v
1
⫽ f(v) and solve for v in terms of
v
1
. We demonstrate using f(x, y) ⫽ (x ⫹ 2y, x
3
). Set
x
1
⫽ x ⫹ 2y
y
1
⫽ x
3
and solve for x and y. The result is
x ⫽ y
1 3
1
y ⫽ (x
1
⫺ y
1 3
1
) 2,
so that the inverse map is f
⫺1
(x, y) ⫽ (y
1 3
, (x
1
⫺ y
1 3
1
) 2).
inverse map is characterized by the fact that f(v) ⫽ w if and only if v ⫽ f
⫺1
(w).
Because one-to-one implies the existence of an inverse, a one-to-one map is also
called an invertible map.
✎ E XERCISE T2.8
Show that the H
´
enon map (2.27) with b ⫽ 0 is invertible by finding a formula
for the inverse. Is the map one-to-one if b ⫽ 0?
77
T WO-DIMENSIONAL M APS
2.6 STABLE AND UNSTABLE MANIFOLDS
A saddle fixed point is unstable, meaning that most initial values near it will
move away under iteration of the map. However, unlike the case of a source, not
all nearby initial values will move away. The set of initial values that converge to
the saddle will be called the stable manifold of the saddle. We start by looking at
a simple linear example.
E XAMPLE 2.17
For the linear map f(x, y) ⫽ (2x, y 2), the origin is a saddle fixed point.
The dynamics of this map were shown in Figure 2.14. It is clear from that figure
that points along the y-axis converge to the saddle 0; all other points diverge to
infinity. Unless the initial value has x-coordinate 0, the x-coordinate will grow
(by a factor of 2 per iterate) and get arbitrarily large.
A convenient way to view the direction of the stable manifold in this case
is in terms of eigenvectors. The linear map
f(v) ⫽ A v ⫽
20
00.5
x
y
has eigenvector
1
0
, corresponding to the (stretching) eigenvalue 2, and
0
1
,
corresponding to the (shrinking) eigenvalue 1 2. The latter direction, the y-axis,
is the “incoming” direction, and is the stable manifold of 0. We will call the x-axis
the “outgoing” direction, the unstable manifold of 0. Another way to describe
the unstable manifold in this example is as the stable manifold under the inverse
of the map f
⫺1
(x, y) ⫽ ((1 2)x, 2y).
Definition 2.18 Let f be a smooth one-to-one map on ⺢
2
, and let p
be a saddle fixed point or periodic saddle point for f.Thestable manifold of p,
denoted
S(p), is the set of points v such that |f
n
(v) ⫺ f
n
(p)| → 0 as n →
⬁
.
The unstable manifold of p, denoted
U(p), is the set of points v such that
|f
⫺n
(v) ⫺ f
⫺n
(p)| → 0 as n →
⬁
.
E XAMPLE 2.19
The linear map f(x, y) ⫽ (⫺2x ⫹
5
2
y, ⫺5x ⫹
11
2
y) has a saddle fixed point
at 0 with eigenvalues 0.5 and 3. The corresponding eigenvectors are (1, 1) and
78

2.6 STA B L E AND U NSTABLE M ANIFOLDS
W HAT IS A M ANIFOLD?
A
n n-dimensional manifold is a set that locally resembles Euclidean
space ⺢
n
. By “resembles” we could mean a variety of things, and
in fact, various definitions of manifold have been proposed. For our
present purposes, we will mean resemblance in a topological sense. A
small piece of a manifold should look like a small piece of ⺢
n
.
A 1-dimensional manifold is locally a curve. Every short piece of a
curve can be formed by stretching and bending a piece of a line. The
letters D and O are 1-manifolds. The letters A and X are not, since
each contains a point for which no small neighborhood looks like a
line segment. These bad points occur at the meeting points of separate
segments, like the center of the letter X.
Notable 2-manifolds are the surface of oranges and doughnuts. The
space-time continuum of the universe is often described as a 4-
manifold, whose curvature due to relativity is an active topic among
cosmologists.
In the strict definition of manifold, each point of a manifold must
have a neighborhood around itself that looks like ⺢
n
. Thus the letters
L and U fail to be 1-manifolds because of their endpoints—small
neighborhoods of them look like a piece of half-line (say the set of
nonnegative real numbers), not a line, since there is nothing on one
side. This type of set is called a manifold with boundary, although
technically it is not a manifold. A M
¨
obius band is a 2-manifold with
boundary because the edge looks locally like a piece of half-plane,
not a plane. Whole oranges and doughnuts are 3-manifolds with
boundary.
One of the goals of Chapter 10 is to explain why a stable or unstable
manifold is a topological manifold. Stable and unstable manifolds
emanate from two opposite sides of a fixed point or periodic orbit. At
a saddle point in the plane, they together make an “X” through the
fixed point, although individually they are manifolds.
79
T WO-DIMENSIONAL M APS
(1, 2), respectively. [According to Appendix A, there is a linear change of coor-
dinates giving the map h(u
1
,u
2
) ⫽ (0.5u
1
, 3u
2
).] Points lying on the line y ⫽ x
undergo the dynamics v → 0.5v on each iteration of the map. This line is the
stable manifold of 0 for f. Points lying on the line y ⫽ 2x (the line in the direc-
tion of eigenvector (1, 2)) undergo v → 3v under f: this is the unstable manifold.
These sets are illustrated in Figure 2.18.
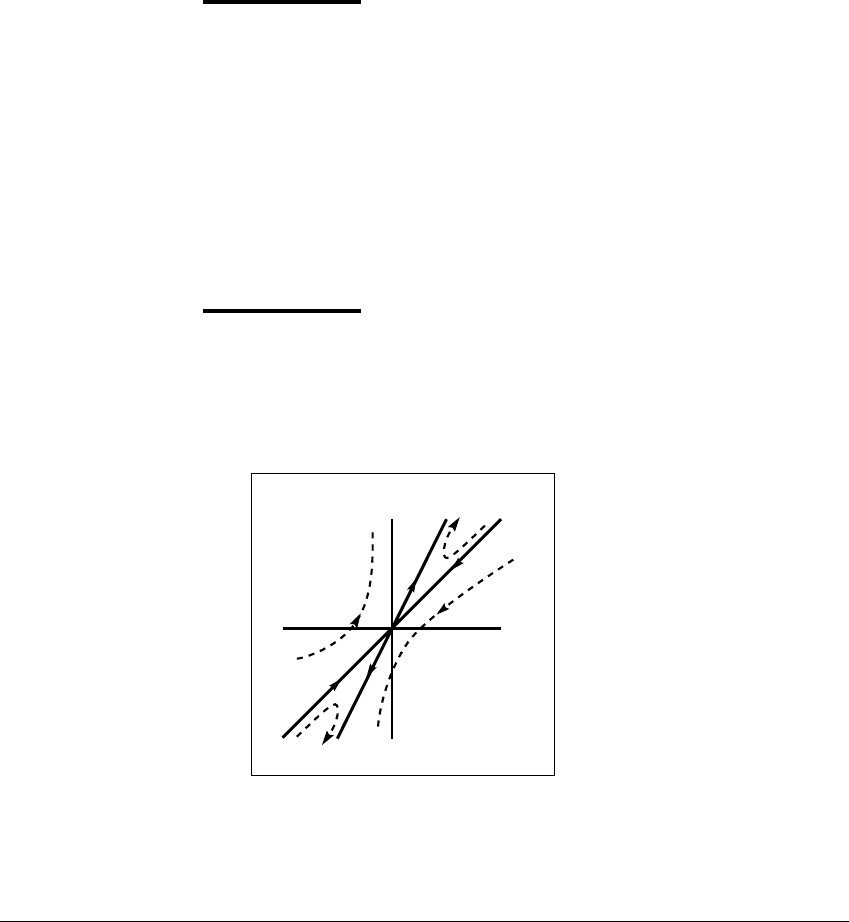
E XAMPLE 2.20
Let f(x, y) ⫽ (2x ⫹ 5y, ⫺0.5y). The eigenvalues of f are 2 and ⫺0.5, with
corresponding eigenvectors (1, 0) and (2, ⫺1). Points on the line in the direction
of the vector (2, ⫺1) undergo v → ⫺0.5v on each iteration of f. As a result,
successive images flip from one side of the origin to the other along the line. This
flipping behavior of orbits about the fixed point is shown in Figure 2.19. It is
characteristic of all fixed points for which the Jacobian has negative eigenvalues,
even when the map is nonlinear. A saddle with at least one negative eigenvalue
is sometimes called a flip saddle. Otherwise it is a regular saddle.
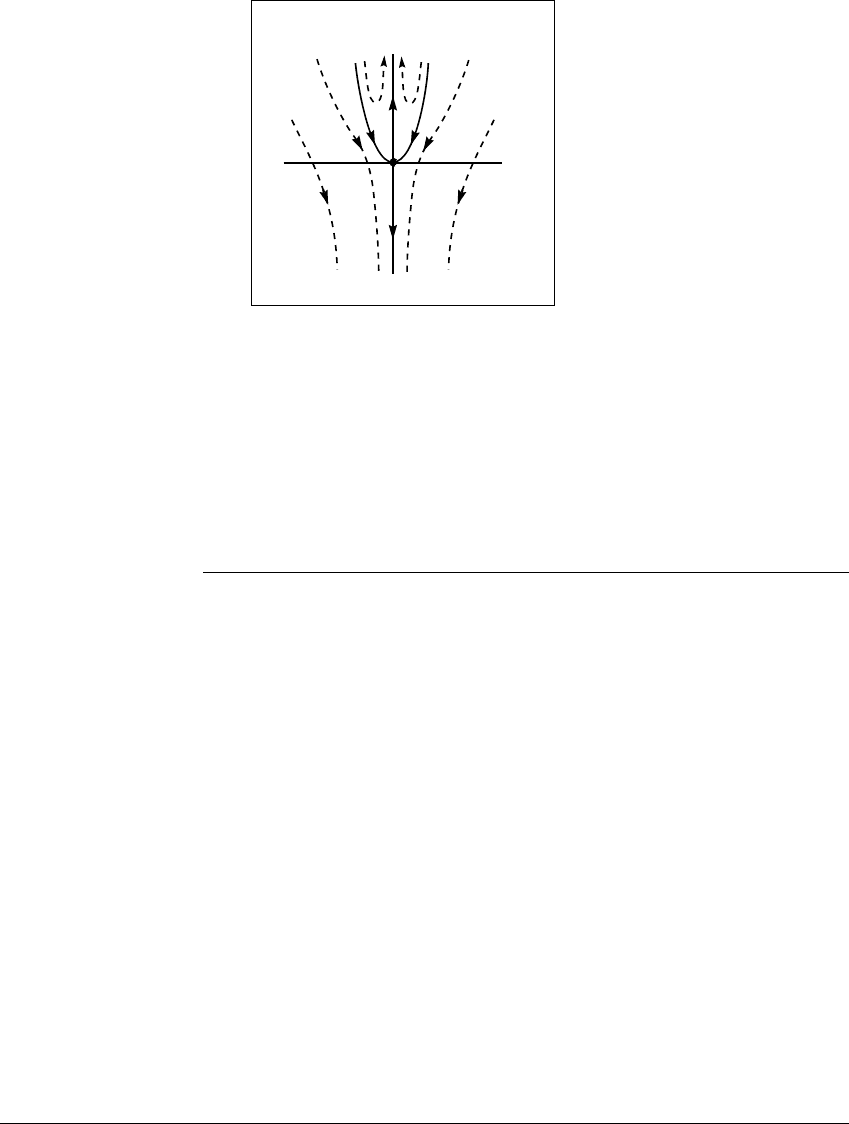
E XAMPLE 2.21
The invertible nonlinear map f(x, y) ⫽ (x 2, 2y ⫺ 7x
2
) has a fixed point
at 0 ⫽ (0, 0). To analyze the stability of this fixed point we evaluate
x
y
Figure 2.18 Stable and unstable manifolds for regular saddle.
The stable manifold is the solid inward-directed line; the unstable manifold is the
solid outward-directed line. Every initial condition leads to an orbit diverging to
infinity except for the stable manifold of the origin.
80

2.6 STA B L E AND U NSTABLE M ANIFOLDS
x
y
Figure 2.19 Stable and unstable manifolds for flip saddle.
Flipping occurs along the stable manifold (inward-directed line). The unstable
manifold is the x-axis.
Df(0, 0) ⫽
0.50
02
.
The origin is a saddle fixed point. The eigenvectors lie on the two coordinate axes.
What is the relation of these eigenvector directions to the stable and unstable
manifolds?
In the case of linear maps, the stable and unstable manifolds coincide with
the eigenvector directions. For a saddle of a general nonlinear map, the stable
manifold is tangent to the shrinking eigenvector direction, and the unstable man-
ifold is tangent to the stretching eigenvector direction. Since f(0,y) ⫽ (0, 2y),
the y-axis can be seen to be part of the unstable manifold. For any point not on
the y-axis, the absolute value of the x-coordinate is nonzero and increases under
iteration by f
⫺1
; in particular, it doesn’t converge to the origin. Thus the y-axis is
the entire unstable manifold, as shown in Figure 2.20. The stable manifold of 0,
however, is described by the parabola y ⫽ 4x
2
; i.e., S(0) ⫽ 兵(x, 4x
2
):x 僆 ⺢其.
✎ E XERCISE T2.9
Considerthesaddlefixedpoint0 of the map f(x, y) ⫽ (x 2, 2y ⫺ 7x
2
)from
Example 2.21.
(a) Find the inverse map f
⫺1
.
(b) Show that the set
S ⫽ 兵(x, 4x
2
):x 僆 ⺢其 is invariant under f,that
is, if v is in S,thenf(v)andf
⫺1
(v)areinS.
81
T WO-DIMENSIONAL M APS
x
y
Figure 2.20 Stable and unstable manifolds for the nonlinear map of Example
2.21.
The stable manifold is a parabola tangent to the x-axis at 0; the unstable manifold
is the y-axis.
(c) Show that each point in S converges to 0 under f.
(d) Show that no points outside of
S converge to 0 under f.
When a map is linear, the stable and unstable manifolds of a saddle are
always linear subspaces. In the case of linear maps on ⺢
2
, for example, they are
lines. For nonlinear maps, as we saw in Example 2.21, they can be curves. The
nonlinear examples we have looked at so far are not typical; usually, formulas
for the stable and unstable manifolds cannot be found directly. Then we must
rely on computational techniques to approximate their locations. (We describe
one such technique in Chapter 10.) One thing you may have noticed about the
stable manifolds in these examples is that they are always one-dimensional: lines
or curves. Just as in the linear case, the stable and unstable manifolds of saddles in
the plane are always one-dimensional sets. This fact is not immediately obvious—
it is proved as part of the Stable Manifold Theorem in Chapter 10. We will also
see that stable and unstable manifolds of saddles have a tremendous influence on
the underlying dynamics of a system. In particular, their relative positions can
determine whether or not chaos occurs.
We will leave the investigation of the mysteries of stable and unstable
manifolds to Chapter 10. Here we give a small demonstration of the subtlety
and importance of these manifolds. Drawing stable and unstable manifolds of the
H
´
enon map can illuminate Figure 2.3, which showed the basin of the period-two
82
2.6 STA B L E AND U NSTABLE M ANIFOLDS
2.5
⫺2.5
⫺2.52.5
(a)
⫺2.52.5
(b)
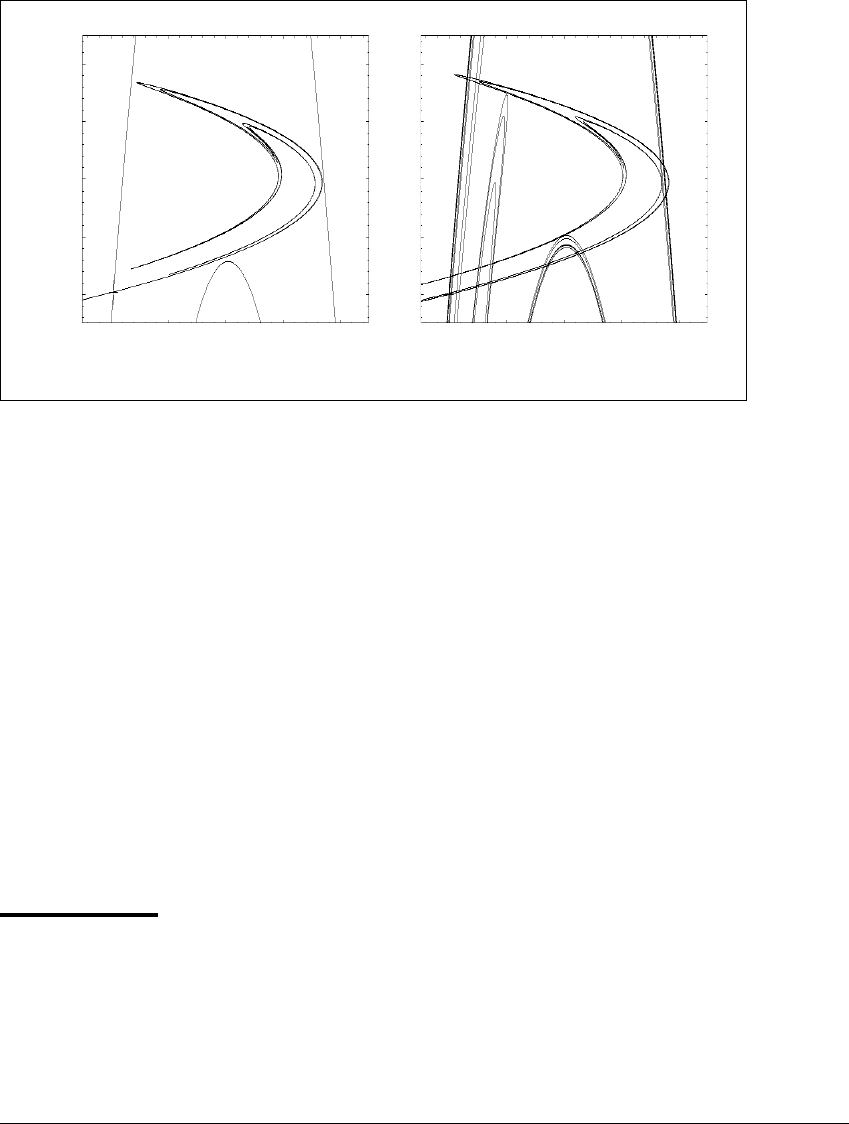
Figure 2.21 Stable and unstable manifolds for a saddle point.
The stable manifolds (mainly vertical) and unstable manifolds (more horizontal)
are shown for the saddle fixed point (marked with a cross in the lower left corner) of
the H
´
enon map with b ⫽⫺0.3. Note the similarity of the unstable manifold with
earlier figures showing the H
´
enon attractor. (a) For a ⫽ 1.28, the leftward piece of
the unstable manifold moves off to infinity, and the rightward piece initially curves
toward the sink, but oscillates around it in an erratic way. The rightward piece is
contained in the region bounded by the two components of the stable manifold.
(b) For a ⫽ 1.4, the manifolds have crossed one another.
sink under two different parameter settings. In Figure 2.21, portions of the stable
and unstable manifolds of a saddle point near (⫺2, ⫺2) are drawn. In each case,
the upward and downward piece of the stable manifold, which is predominantly
vertical, forms the boundary of the basin of the period-two sink. (Compare with
Figure 2.3.) For a larger value of the parameter a, as in Figure 2.21(b), the stable
and unstable manifolds intersect, and the basin boundary changes from simple to
complicated.
E XAMPLE 2.22
Figure 2.22 shows the relation of the stable and unstable manifolds to the
basin of the two-piece attractor for the H
´
enon map with a ⫽ 2, b ⫽⫺0.3. This
basin was shown earlier in Figure 2.11. The stable manifold of the saddle fixed
point in the lower left corner forms the boundary of the attractor basin; the
attractor lies along the unstable manifold of the saddle.
83