Alfred DeMaris - Regression with Social Data, Modeling Continuous and Limited Response Variables
Подождите немного. Документ загружается.

the following family arrangements: a step-parent family, a family consisting
of one parent and cohabiting partner, and a two cohabiting parents family.
11.13 A Cox regression for the log-hazard of union disruption based on the 1230
couples in the NSFH used the following predictors: relationship duration in
months (DURATION), female’s age at union inception (FAGUNION),
whether either partner experienced a parental divorce (PARENTAL), whether
the household had children under 5 (CHDN5), and whether either partner was
a minority (MINORITY). Partial results are:
(a) Is the model significant as a whole?
(b) Compute the Wald χ
2
for each coefficient. Which coefficients are
significant?
(c) What is the discriminatory power of the model?
11.14 Added to the model in Exercise 11.13 is a nonproportional effect of
PARENTAL, of the form PARENTAL * TIME, producing:
(The effect of PARENTAL in this model is .079.) Test whether
PARENTAL has a significant nonproportional effect. Irrespective of the
outcome of the test, show the hazard ratio for those with versus without
parental divorce experience at 1 month’s, 10 months’, 30 months’, and
50 months’ duration.
11.15 A Cox regression for the log-hazard of union disruption based on the 1230
couples in the NSFH used the following wave 1 predictors: male partner
was violent (HEHIT), female partner was violent (SHEHIT), male’s rela-
tionship happiness (HUSHAP), female’s relationship happiness (WIFHAP),
male’s relationship commitment (HCOMMIT), female’s relationship com-
mitment (WCOMMIT). Partial results are as follows:
Variable b
PARTIME .00314
⫺2 ln L 4556.388
Variable b σ
ˆ
b
DURATION ⫺.015 .006
FAGUNION ⫺.042 .009
PARENTAL .220 .133
CHDN5 .103 .120
MINORITY .200 .129
⫺2lnL
0
4599.743
⫺2lnL
1
4556.715
EXERCISES 415
c11.qxd 8/27/2004 2:56 PM Page 415
(a) Interpret the significant (at p ⱕ .05) effects.
(b) By what percent is the hazard of disruption elevated when the male has
been violent versus when the female has been violent.
(c) If the estimated covariance of the parameter estimates for HEHIT and
SHEHIT is ⫺.05, give a 95% confidence interval for the ratio of the haz-
ard of disruption for couples characterized by male violence versus cou-
ples characterized by female violence.
(d) What is the discriminatory power of the model?
11.16 The following data represent age at first sexual intercourse or censoring for
a sample of six teenage girls, along with mother’s educational level and a
dummy for family type (1 ⫽ “two-parent biological,” 0 ⫽ “other”):
a
1 ⫽ uncensored; 0 ⫽ censored.
If the estimate of the effect of mother’s education from a Cox model stratified
by family type is ⫺.144, give ⫺2 ln L for the stratified Cox model.
11.17 The following data represent times in months to voluntary job termination
or censoring for five employees, along with the cumulative number of days
of sick leave taken by the start of the study:
a
1 ⫽ uncensored; 0 ⫽ censored.
Censoring Days of
Subject Indicator
a
Months Sick Leave
1 1 14 2
2130
31912
4 0 15 1
5024
Censoring Family Mother’s
Subject Indicator
a
Age Type Education
1 1 16 1 13
2 0 19 1 15
3 1 17 1 20
4 1 15 0 12
5 1 16 0 16
6 0 14 0 17
Variable b σ
ˆ
b
HEHIT .316 .248
SHEHIT .132 .242
HUSHAP ⫺.084 .051
WIFHAP ⫺.144 .047
HCOMMIT ⫺.095 .073
WCOMMIT ⫺.425 .070
LRχ
2
150.153
416 INTRODUCTION TO SURVIVAL ANALYSIS
c11.qxd 8/27/2004 2:56 PM Page 416

If the Cox estimate for the effect of days of sick leave is .070, give ⫺2lnL
for the Cox model with days of sick leave as the predictor.
Use the Union Disruption Data for the following computer exercises involving Cox
regression.
11.18 Estimate a Cox model for the hazard of disruption as a function of MEDUC,
FEDUC, MINCOME, FINCOME, HE1, and WE1. Adjust for left truncation
using the method, outlined by Allison (1995), in which one of the predictors
is made into a time-varying covariate as follows. A covariate, say MEDUC,
is labeled MEDUCTD. MEDUCTD is then set to missing while SURVIVAL
is less than DURATION; otherwise, it is set equal to MEDUC. MEDUCTD
is then used in the model in place of MEDUC.
(a) Report the parameter estimates and note which ones are significant.
(b) Interpret the effects of FEDUC and MINCOME.
(c) Test (at α⫽ .05) for the equality of the effects of male and female edu-
cation as well as the equality of effects of male and female income using
individual Wald tests.
11.19 Test whether the effects of MEDUC versus FEDUC and the effects of MIN-
COME vs. FINCOME are equal using a global test for both equalities simul-
taneously.
11.20 Estimate the model in Exercise 11.15 stratified by MINORITY (minority sta-
tus of the couple), and test whether the parameter vector is invariant over strata.
11.21 Estimate a model of union disruption as a function of DURATION, FAGU-
NION, FIRSTUNI, ALCDRUG, DISAGMT, COMSTYLE, and the interaction
of DISAGMT with COMSTYLE. Estimate the impact of DISAGMT at 1 stan-
dard deviation above the mean level of communication style, and test whether
it is significant at this level of COMSTYLE. (Hint: Use targeted centering.)
11.22 Perform May and Hosmer’s (1998) goodness-of-fit test for model 3 in Table
11.2.
EXERCISES 417
c11.qxd 8/27/2004 2:56 PM Page 417

418
Regression with Social Data: Modeling Continuous and Limited Response Variables,
By Alfred DeMaris
ISBN 0-471-22337-9 Copyright © 2004 John Wiley & Sons, Inc.
CHAPTER 12
Multistate, Multiepisode, and
Interval-Censored Models
in Survival Analysis
CHAPTER OVERVIEW
In Chapter 11 we considered various ways of modeling single, nonrepeatable events,
using Cox’s semiparametric regression model as our primary analytic vehicle. Often,
however, event histories are more complex. For example, instead of duration at risk
terminating in only one possible state, there may be multiple destination states that
terminate duration at risk. I have already alluded to one such possibility: that mar-
riages may terminate in death as well as in separation or divorce. Or, rather than
being a one-time occurrence, the event of interest may be repeatable. Examples of
repeatable events are getting married, taking a job, getting a promotion, being arrested,
or getting pregnant. In these instances, each person may contribute several survival
spells or episodes to the data file. Or, events may take place in discrete rather than
continuous time. An example already given is promotion to a higher academic rank
in institutions of higher education. Even if events occur in continuous time, however,
duration at risk may only be recorded in terms of time intervals rather than exact
times. Such discrete or interval-censored data require different modeling techniques
than those heretofore discussed.
In this chapter we expand our toolkit for survival analysis by considering the
modeling of multiple events, the modeling of repeated events, and the modeling of
data that are discrete or interval-censored. I begin with an exploration of models for
multiple events, focusing on the competing risks model. An alternative two-step
model is also considered for cases in which the competing risks model is not war-
ranted. I then move to a discussion of models for repeated events. Because repeated
c12.qxd 8/27/2004 2:57 PM Page 418

episodes for a given person are likely to be correlated, I discuss several approaches
to handling the dependence of survival times across cases. Finally, I detail the
approach taken when data are either interval-censored or truly discrete. As this situ-
ation necessitates the transformation of one’s data, I discuss the data-transformation
process first and then consider how survival analysis is accomplished with the trans-
formed data file. Data for illustrating the techniques are, again, drawn from the
author’s own research.
MULTISTATE MODELS
Survival models in which duration-at-risk can terminate in any of several possible
destination states are termed multistate models (Blossfeld et al., 1989). In many
instances, event histories are characterized by multiple event types rather than a sin-
gle type. For example, duration in unmarried cohabitation can terminate in either
separation or marriage. Duration in a given job can end in either voluntary job ter-
mination, involuntary job termination, a transition to a job with a different firm, or a
promotion (or demotion) within the same firm. Duration in college can end in drop-
ping out of school, a transfer to a different college, or graduation. The most common
approach to analyzing these types of event histories is the competing risks model.
The model is predicated on two key assumptions. First, it is assumed that the transi-
tion to each event type is governed by a separate causal process. An alternative
model that assumes the same underlying process for all transitions is discussed
below. Second, it is assumed that conditional on model covariates, the multiple event
types are independent of each other. That is, the hazard of any given event type is
unrelated to the hazard of any other event type. With respect to duration in college,
for example, this would mean that those who are at especially high risk of transfer-
ring to another school are not, as a result, at any higher or lower risk for dropping
out than others. A model that allows for dependence among events is also discussed
below.
Modeling Type-Specific Hazard Rates
Suppose that for each person, i, there are a total of m ⫽ 1,2,...,Q different possi-
ble destination states that could terminate his or her duration at risk. Further, let T
i
represent the variable containing the survival time for the ith person and let M
i
rep-
resent the variable denoting the event type that the ith person transitioned to at time
T
i
⫽ t. Competing risks models utilize type-specific hazard rates of the form
h
im
(t) ⫽ lim
∆t→0
. (12.1)
The probability in the numerator of equation (12.1) is identical, apart from the i sub-
script, to that in equation (11.1.) defining the hazard for single events, except for the
addition of “M
i
⫽ m.” This probability is now interpreted as the conditional proba-
bility of event occurrence in some small interval of time, given survival up to the
P(t ⱕ T
i
⬍ t ⫹ ∆t, M
i
⫽ m 冟 T
i
ⱖ t)
ᎏ
ᎏᎏᎏᎏ
∆t
MULTISTATE MODELS 419
c12.qxd 8/27/2004 2:57 PM Page 419

beginning of that interval and given that the event is of the mth type. In words, h
im
(t)
is the instantaneous rate of occurrence of the mth event type to the ith person at time
t given survival up to that time. One way of thinking about these hazards is to define
T
im
as the time at which the mth event type occurred to the ith case and to imagine that
each case has a set of T
i1
, T
i2
,...,T
iQ
times attached to it. However, in that the
occurrence of one event removes one from the risk of occurrence of any other
events—and hence the name competing risks—we only observe one time, T
i
, the one
that is the smallest (Allison, 1995). As before, of course, observations who are still
at risk at the end of the study or who are lost to follow-up are considered censored.
The overall hazard of event occurrence at any given time is simply the sum of haz-
ards for all possible event types. That is,
h
i
(t) ⫽
冱
Q
m⫽1
h
im
(t).
A Cox model for competing risks takes the form
h
im
(t) ⫽ h
0m
(t) exp(x
i
⬘
ββ
m
). (12.2)
Noteworthy is the fact that the baseline hazard function and the coefficient vector are
both subscripted with “m.” This implies that separate processes are allowed to char-
acterize each type-specific hazard: Each can have a different baseline hazard func-
tion and a different set of effect parameters. [More generally, each hazard can even
include different explanatory variables or be modeled using a different parameteri-
zation of survival time; see Allison (1995).] It turns out that the partial likelihood
function for model (12.2) factors into distinct partial likelihoods for each event type
if the competing events are considered censored cases (Allison, 1995). What this
means is that the parameters of equation (12.2) can be estimated by estimating a Cox
model for each separate event type while treating the competing events and censored
cases all as censored observations. Hence, estimating a competing risks model
involves no new techniques over those that were covered in Chapter 11. The analy-
sis of each different transition produces a LRχ
2
test and a set of estimates that are
asymptotically normally distributed, enabling the usual Wald tests and confidence
intervals pertaining to the given event type.
One new question arises, however. We might ask whether a separate model is
really necessary for each event type, instead of simply treating all events the same
and estimating equation (11.11), the Cox model for a single event. A test statistic for
the null hypothesis that the same process determines all transitions is formed as fol-
lows. First, estimate equation (12.2) in the manner described above. Then sum all M
of the minus twice log-likelihoods for the resulting Cox models as
⫺2lnL
M
⫽
冱
Q
m⫽1
⫺
2lnL
m
.
Then code as the same “event” all M of the different event types and estimate a Cox
model for the occurrence of an “event.” Denote ⫺2 ln L for this model as ⫺2lnL
C
.
Assume there are K predictors in the model, in general. The test statistic for testing
420 MULTISTATE, MULTIEPISODE, AND INTERVAL-CENSORED MODELS
c12.qxd 8/27/2004 2:57 PM Page 420

model invariance to event type is
∆χ
2
[K(M⫺1)]
⫽⫺2lnL
c
⫺ (⫺2lnL
M
), (12.3)
which under the null hypothesis of invariance is distributed as chi-squared with
K(M ⫺ 1) degrees of freedom. The term K(M ⫺ 1) represents the difference in the
number of parameters estimated to construct L
C
versus L
M
. A significant result sup-
ports the competing risks approach.
Example: Transitions Out of Cohabitation
In a recent article the author examined survival time in the state of unmarried cohab-
itation for 411 cohabiting couples in the NSFH (DeMaris, 2001). Couples were all
cohabiting in wave 1 of the survey, at which time several characteristics of the cou-
ples were measured. In wave 2 of the survey interviewers recorded whether the cou-
ple was still together or not. If the couple had separated, the date of separation was
recorded. If the couple had married, the date of marriage was recorded. Thus, two
transitions were possible: separation and marriage. In all, 85 couples were still cohab-
iting unmarried, while 173 had married and 153 had separated. Those who were still
cohabiting unmarried were considered censored observations.
Demographic predictors of the hazard of a transition included female’s age at
union inception, relationship duration (in months) as of the wave 1 survey, whether
either partner was a minority, and whether the couple experienced a birth to the
union between waves 1 and 2, the last being a time-varying covariate. Several other
measures tapped the quality of the relationship as measured in wave 1: frequency of
open disagreement, conflict resolution style, each partner’s relationship happiness
(on a scale from 1 ⫽ “very unhappy” to 7 ⫽ “very happy”), and each partner’s per-
ception of relationship stability (on a scale from 1 ⫽ “very high probability of sepa-
rating” to 5 ⫽ “very low probability of separating”). The focus variables pertained to
intimate violence experienced by the couple. Measures of intimate violence con-
sisted of dummies for whether or not the male or the female had been violent with
each other in the past year and whether or not the relationship had been character-
ized by intense male violence. The latter was coded 1 if the male had been the only
violent partner, or both were violent but the male’s violence was more frequent, or
the female was the only injured partner. The primary hypothesis was that violence
by either partner, and especially intense male violence, would elevate the risk of sep-
aration and diminish the risk of marriage, net of other regressors.
I estimated a competing risks model by first specifying a Cox model for the haz-
ard of separation, treating both continuous cohabitation and marriage as censored
cases. Then I specified a Cox model for the hazard of marriage, treating continuous
cohabitation and separation as censored cases. As couples had been cohabiting for
anywhere from less than one month to over 18 years when interviewed in wave 1,
both models were adjusted for left truncation. The results are shown in Table 12.1.
At first glance, it appears that the transition to marriage is better accounted for
than the transition to separation. The discriminatory power, using
R
2
G
, of models for
MULTISTATE MODELS 421
c12.qxd 8/27/2004 2:57 PM Page 421
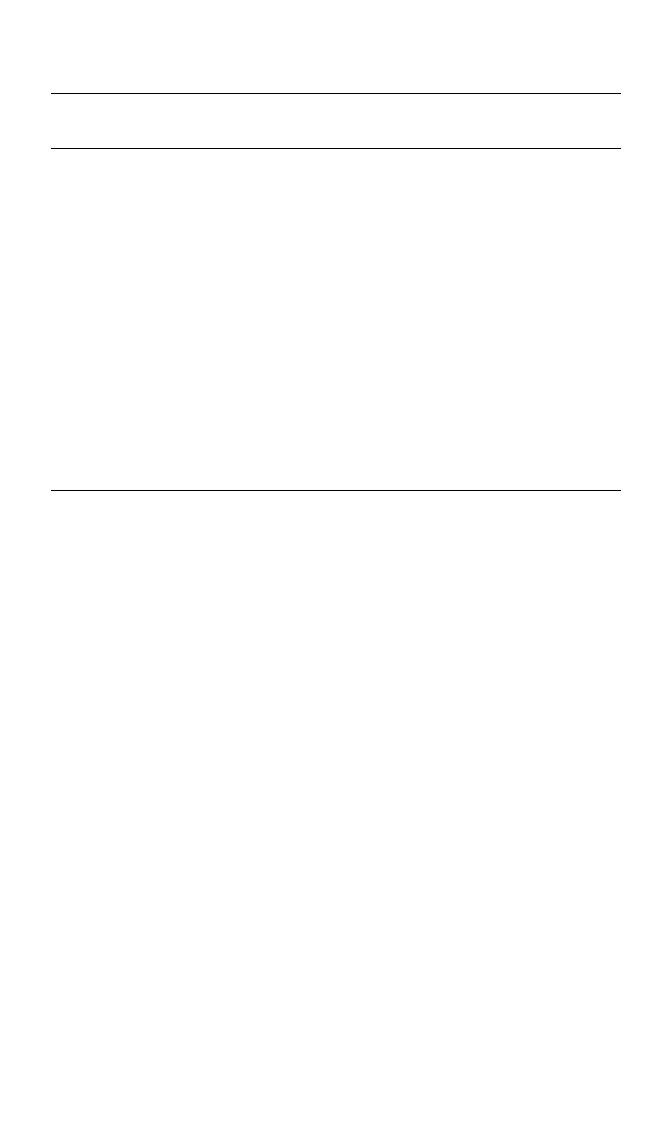
separation and marriage are .118 and .189, respectively. Only four effects are significant
for the risk of separation. Predictably, couples with a more positive conflict resolu-
tion style have lower hazards of separation than others. Also, consistent with the ear-
lier study of union disruption reported in Chapter 11, couples who were older at
union inception, as tapped by the female’s age at union inception, have lower risks
of separating. Although neither partner’s violence per se has an effect on separation,
couples characterized by intense male violence have hazards of separation that are
higher than others’ by a factor of exp(.731) ⫽ 2.077; or their hazards of separating
are about twice as high as others’. A birth to the union between survey waves reduces
the hazard of separation, similar to its effect found in Chapter 11 for the sample that
included marrieds.
Several effects are significant when predicting the transition to marriage. A more
positive conflict resolution style hastens the transition to marriage, as does a greater
frequency of disagreement. The latter effect may well be due to dissatisfaction with
being unmarried and conflicts over whether or when to make the transition to mar-
riage. Surprisingly, the only effect of factors measuring violence is for violence by
the female partner, which lowers the transition rate to marriage. I have earlier spec-
ulated that as it is still customary for the male to propose marriage, her violence may
inhibit that step on his part (DeMaris, 2001). Minority couples have lower hazards
422 MULTISTATE, MULTIEPISODE, AND INTERVAL-CENSORED MODELS
Table 12.1 Competing Risks Models for Exits from Unmarried
Cohabitation
Transition to Transition to
Predictor Separation
a
Marriage
b
Open disagreement ⫺.013 .073**
Conflict resolution style ⫺.155* .138*
Male’s violence ⫺.620 .755
Female’s violence .479 ⫺1.286*
Intense male violence .731* ⫺.307
Union birth
c
⫺.878* ⫺2.367**
Female’s age at union ⫺.035** ⫺.013
Relationship duration (months) ⫺.006 ⫺.010
Minority couple ⫺.062 ⫺.765***
Male’s relationship happiness .009 .196*
Female’s relationship happiness ⫺.153 ⫺.179*
Male’s relationship stability ⫺.212 .321**
Female’s relationship stability ⫺.027 .312*
Likelihood ratio χ
2
51.896*** 86.126***
Degrees of freedom 13 13
Note: n ⫽ 411.
a
Survival time is censored upon transition to marriage.
b
Survival time is censored upon transition to separation.
c
Time-varying covariate.
* p ⬍ .05. ** p ⬍ .01. *** p ⬍ .001.
c12.qxd 8/27/2004 2:57 PM Page 422

of marriage, net of other factors. Somewhat counterintuitively, experiencing a birth
to the union inhibits the transition to marriage. However, this effect is consistent with
others’ findings. In particular, Wu and Balakrishnan (1995) suggest that those who
are comfortable with having children outside of marriage are probably more ideo-
logically committed to long-term cohabitation as an alternative to marriage. The
remaining indices of marital quality have predictable effects except for the female’s
relationship happiness: The happier she is with the relationship, the lower the haz-
ard of marriage. Most likely this just reflects the fact that if women are happy with
the relationship as is, they are reluctant to formalize the union.
Test for Model Invariance. Although regressor effects appear to be quite different for
the event of separation, as opposed to marriage, this could simply be the result of
sampling error. As mentioned, the null hypothesis of model invariance is that the
same baseline hazard function and the same parameter vector characterize each
transition type. This hypothesis was evaluated by estimating a Cox model for any
transition out of cohabitation, where marriage and separation are treated as the same
event, and employing the test statistic in equation (12.3). Minus twice the log likeli-
hood for the combined-event model was 2907.772, while ⫺2 lnL for the models for
separation and marriage, respectively, were 1314.038 and 1512.889. The test statistic is,
therefore, ∆χ
2
⫽ 2907.772 ⫺ (1314.038 ⫹ 1512.889) ⫽ 80.845. As the model has 13
covariates, the degrees of freedom equal 13(2 ⫺ 1) ⫽ 13. At a p-value of less than
.00001, the test is quite significant, suggesting that the two events are characterized
by different hazard processes.
Alternative Modeling Strategies
Two-Step Approach. As indicated, the competing risks model presumes that transi-
tions to different end states are characterized by different causal processes acting in
parallel (Allison, 1995). However, some multistate processes may follow a different
pattern. For example, the transition to a romantic union from the single state may be
determined primarily by one set of factors, such as subjects’ opportunities to meet
potential partners or their own attractiveness in the marriage market. However,
whether that union is an unmarried cohabitation rather than a marriage may be more
strongly determined by other factors, such as subjects’ educational level, religiosity,
or family background. This raises the possibility of an alternative modeling strategy
in which one mechanism is allowed to govern the timing of a transition, in general,
and a separate mechanism governs the type of transition, given that a transition
occurs. Dubbed the two-step approach by Hachen (1988), the model is estimated by
first estimating a survival model—say, the Cox model—for the transition to any
state. In this case, all outcome states are treated the same (i.e., they are all coded as
the same state). In a second step, only the subjects who made a transition are
selected, and a multinomial (or binary) logit model is estimated to examine the
impact of model covariates on which state is selected. In this second analysis, the log
of survival time is included as a covariate (Allison, 1995). Note that this second step
is not an event history analysis.
MULTISTATE MODELS 423
c12.qxd 8/27/2004 2:57 PM Page 423

The choice of whether to employ the competing risks or two-step approach is
strictly a theoretical decision. Allison (1995) suggests that the two-step approach is
especially appropriate if the different destination states are alternative means for
achieving the same goal, as in married versus unmarried cohabitation. By this crite-
rion, the competing-risks model is clearly more appropriate for the analysis of cohab-
iting transitions, as separation and marriage fulfill very different goals for cohabitors.
Hachen (1988) provides detailed guidelines concerning which model to use, but these
are more conceptually complex. Let P(m) represent the conditional probability that
the mth state is entered, given transition to some state. Hachen suggests that the two-
step model is to be preferred whenever the effect of covariates on a transition, in gen-
eral, is invariant to changes in the P(m) for m ⫽ 1,2,...,Q. One example given by
Hachen considers the effect of taking a high school sex-education class on the first
type of contraception used during sexual intercourse. Suppose for some reason the
availability of, say, IUDs to adolescents were suddenly curtailed. If the effect of high
school education on the hazard of first contraceptive use in general is not affected by
the lowered probability of IUD use, the two-step model should be employed.
Otherwise, the competing risks model would be preferable.
Dependence of Events. The assumption of competing risks models that alternative
destination states are independent of each other may often be untenable. Instead,
unmeasured factors may link each of the states. Using, again, the formation of the
first romantic union as an example, it is likely that unmeasured characteristics of
individuals, such as a need for intimate companionship, raise or lower the risk of
union formation, in general. Therefore, the hazard of cohabitation and the hazard of
marriage would tend to be correlated across cases. Hill et al. (1993, p. 247) maintain
that hazard models that ignore this type of dependence among hazards “may provide
inaccurate estimates of base hazard rates or parameters.” The authors have formu-
lated a shared unmeasured risk factors (SURF) model to adjust for correlated haz-
ards, which can be estimated using conventional software. The technique currently
has several limitations, however. It has only been formulated for the case of two
competing risks. Moreover, only a positive correlation between risks is allowed for;
and the approach assumes that the two-step model is appropriate. If these conditions
are satisfactory, the model can be estimated via a two-stage procedure that is detailed
in the authors’ article (Hill et al., 1993).
MULTIEPISODE MODELS
Models for repeated events are termed multiepisode (Blossfeld et al., 1989) or recur-
rent event models (Hosmer and Lemeshow, 1999). Rather than contributing just one
spell to the data file, each case now contributes e ⫽ 1,2,...,E potential spells to the
file, where e represents a given event number, and E the total number of events expe-
rienced by the ith case. Each spell is a survival time in the nonevent state until the
event recurs. There are several potential ways of modeling repeated events (see, e.g.,
Hosmer and Lemeshow, 1999). The model discussed here is that advocated by
424 MULTISTATE, MULTIEPISODE, AND INTERVAL-CENSORED MODELS
c12.qxd 8/27/2004 2:57 PM Page 424