Живов Л.И., Овчинников А.Г., Складчиков Е.Н. Кузнечно-штамповочное оборудование
Подождите немного. Документ загружается.

Раздел
VLABT0AL4ТИЗАЦИЯПРОЕКТИРОВАНИЯКШМ
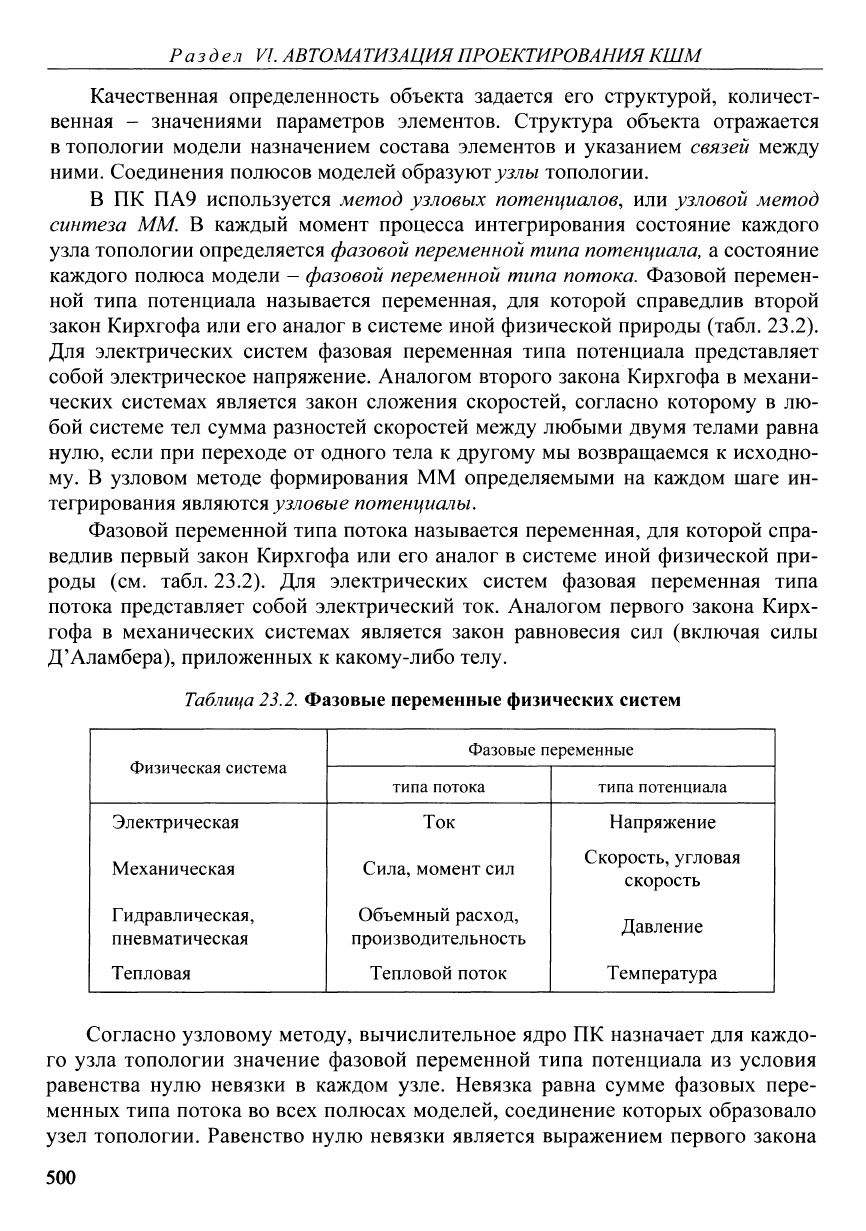
Качественная определенность объекта задается его структурой, количест-
венная - значениями параметров элементов. Структура объекта отражается
в топологии модели назначением состава элементов и указанием связей между
ними. Соединения полюсов моделей образуют
з;:?лы
топологии.
В ПК ПА9 используется метод узловых потенциалов, или узловой метод
синтеза ММ. В каждый момент процесса интегрирования состояние каждого
узла топологии определяется фазовой переменной типа потенциала, а состояние
каждого полюса модели - фазовой переменной типа потока. Фазовой перемен-
ной типа потенциала называется переменная, для которой справедлив второй
закон Кирхгофа или его аналог в системе иной физической природы (табл. 23.2).
Для электрических систем фазовая переменная типа потенциала представляет
собой электрическое напряжение. Аналогом второго закона Кирхгофа в механи-
ческих системах является закон сложения скоростей, согласно которому в лю-
бой системе тел сумма разностей скоростей между любыми двумя телами равна
нулю,
если при переходе от одного тела к другому мы возвращаемся к исходно-
му. В узловом методе формирования ММ определяемыми на каждом шаге ин-
тегрирования
являются
узловые потенциалы.
Фазовой переменной типа потока называется переменная, для которой спра-
ведлив первый закон Кирхгофа или его аналог в системе иной физической при-
роды (см. табл. 23.2). Для электрических систем фазовая переменная типа
потока представляет собой электрический ток. Аналогом первого закона Кирх-
гофа в механических системах является закон равновесия сил (включая силы
Д'Аламбера), приложенных к какому-либо телу.
Таблица
23.2.
Фазовые переменные физических систем
Физическая система
Электрическая
Механическая
Гидравлическая,
пневматическая
Тепловая
Фазовые переменные
типа потока
Ток
Сила, момент сил
Объемный расход,
производительность
Тепловой поток
типа потенциала
Напряжение
Скорость, угловая
скорость
Давление
Температура
Согласно узловому методу, вычислительное ядро ПК назначает для каждо-
го узла топологии значение фазовой переменной типа потенциала из условия
равенства нулю невязки в каждом узле. Невязка равна сумме фазовых пере-
менных типа потока во всех полюсах моделей, соединение которых образовало
узел топологии. Равенство нулю невязки является выражением первого закона
500
Глава 23. Принципы и
содерэюание
автоматизированного проектирования КШМ
Кирхгофа или его аналога в системе иной физической природы. В механичес-
ких системах равенство нулю невязки является выражением условия равнове-
сия сил, в гидравлических и пневматических системах - условия неразрыв-
ности среды.
Результатом синтеза ММ объекта проектирования является система обык-
новенных дифференциальных уравнений, получаемая без непосредственного
участия пользователя и скрытая от него. Порядок системы уравнений определя-
ется числом узлов топологии. Методы синтеза ММ и ее решения инвариантны
по отношению к физической природе объекта. Поэтому в ММ объекта проекти-
рования могут быть представлены входящие в состав объекта механические,
электрические, гидравлические, пневматические, информационные подсистемы,
а также их совокупность.
Система дифференциальных уравнений решается одним из методов интег-
рирования по выбору пользователя. Библиотека методов интегрирования ПК
ПА9 в состоянии поставки содержит неявный метод Эйлера (1-го порядка)
и метод трапеций. Библиотека открыта для включения в нее иных методов ин-
тегрирования.
ПК ПА9 имеет библиотеку методов одномерной и многомерной оптимиза-
ции. В состоянии поставки ПК ПА9 библиотека содержит методы полного пере-
бора, половинного деления, золотого сечения, квадратичной интерполяции, слу-
чайного поиска, метод Нелдера-Мида.
Схемный графический редактор. С помощью схемного графического ре-
дактора создают исходное описание объекта проектирования и задание на рас-
чет, указывают объем вывода результатов. Окно схемного графического ре-
дактора открывается при загрузке комплекса и содержит поле схемы с сеткой
и главное меню («Файл», «Вид/Правка», «Окно», «Команды»).
Топологию ММ создают размещением на поле схемы графических образов
ММЭ и назначением связей между ними. Для этого выбирают команды «Окно»
(главное меню) и «Образцы компонентов», физическую природу элемента
(«Механика», «Гидравлика», «Пневматика», «Логика» и др.) или его функцио-
нальное назначение («Оператор», «Базовый компонент», «Математика», «Опти-
мизация» и др.) и сам элемент (см. табл. 23.1). Размещение элементов осу-
ществляют с привязкой к сетке поля схемы. Связи между элементами создают
соединением полюсов моделей.
Каждый полюс ММЭ механической природы соответствует одной из ко-
ординат одно-, двух- или трехмерного геометрического пространства. В соеди-
нении полюсов участвуют полюса одной и той же координаты. Обра-
зующийся при этом узел соответствует той же координате геометрического
пространства. Полюса ММЭ электрической, гидравлической, пневматической
природы, а также логических соответствуют входам и выходам самих эле-
ментов. Для элементов пневматической природы каждому входу (выходу)
элемента соответствует пара полюсов: «гидравлический» и тепловой. Степень
501
Раздел VLАВТОМАТИЗЛЦИЯПРОЕКТИРОВАНИЯКШМ
подробности представления структуры объекта в его ММ определяется харак-
тером решаемой расчетной задачи.
Количественная определенность объекта проектирования задается значе-
ниями параметров элементов. Окно параметров открывается, если щелкнуть по
графическому образу ММЭ. Созданное таким образом описание ММЭ объекта
проектирования достаточно для ее реализации.
Задание на расчет состоит из одного или нескольких операторов, чаще все-
го динамического анализа. Оператор устанавливают на свободной части поля
схемы командами «Окно», «Образцы компонентов», «Базовые компоненты»
самого оператора. В последнем задают метод интегрирования и параметры
управления вычислительными процессами: модельное время; минимальный,
максимальный и стартовый шаги интегрирования; точность интегрирования
и др. Окно параметров управления открывается, если щелкнуть по изображе-
нию оператора.
Результаты расчета представляются в виде графиков и массивов числовых
значений переменных. Для вывода переменных служат индикаторы. Индикато-
ры фазовых переменных типа потенциала и интеграла фазовой переменной типа
потенциала присоединяют к соответствующему узлу топологии. Индикаторы
фазовых переменных типа потока включают в разрывы связей топологии.
ПК ПА9 предусматривает возможность определения так называемых рас-
четных переменных, которые по своей природе не являются фазовыми (напри-
мер,
энергетические показатели, напряжения в деталях и др.), но представляют
интерес для проектировщика. Вывод расчетных переменных осуществляют
с помощью универсальных индикаторов, свободно размещаемых на поле схемы
без привязки к другим элементам. Индикатор устанавливают командами «Ок-
но»,
«Образцы компонентов», «Базовые компоненты». Для индикатора задают
цвет кривой на графике, значения переменной на верхней и нижней осях графи-
ка или включают режим автокорректировки пределов и другие атрибуты. Для
универсального индикатора указывают расчетную переменную, которую необ-
ходимо определить. Окно атрибутов индикатора открывается, если щелкнуть по
изображению оператора.
ПК ПА9 имеет встроенные средства вычисления других величин, получае-
мых путем математических преобразований значений фазовых и расчетных пе-
ременных, определяемых в моделировании. Для этого используют элементы,
выполняющие основные математические операции: сложение, умножение, воз-
ведение в степень, извлечение корня, вычисление алгебраических и тригономет-
рических функций, дифференцирование, интегрирование и др. Для математи-
ческих преобразований величин на поле схемы размещают графические образы
элементов соответствующих математических операций и соединяют их входы
и выходы.
Графический образ устанавливают командами «Окно», «Образцы компо-
нентов», «Математика». Математические преобразования значений фазовых
502
Глава 23. Принципы и
содерэюание
автоматизированного проектирования КШМ
и расчетных переменных при моделировании выполняются параллельно процес-
су интегрирования.
На получаемых графиках для каждой переменной указываются ее название,
выбранное пользователем, а также значения на верхней и нижней осях графика.
Сама кривая, ее название и значения на осях графика имеют одинаковый цвет,
установленный пользователем. Числовые значения переменных могут быть оп-
ределены для любой точки любого графика с помощью курсора.
На графиках, непосредственно полученных в результате моделирования, пе-
ременные выведены в функции времени. ПК ПА9 позволяет представить пере-
менные в функции любой другой переменной, имеющейся на графике. Это дает
возможность практически без дополнительных затрат труда и времени получать
интересующие проектировщика графики, например индикаторные диаграммы
работы молотов.
23.7.
Особенности проектирования кузнечно-штамповочных
машин с использованием программных комплексов
анализа динамических систем
В соответствии со сложившейся практикой проектирования КШМ сначала
принимаются проектные решения конструктивного характера, что неизбежно
сопровождается назначением внутренних параметров X, а затем расчетным пу-
тем проверяется соответствие принятых проектных решений техническим тре-
бованиям (см. (23.1)). Это соответствует решению уравнения (23.2) относительно
вектора выходных параметров Y. Такой расчет носит проверочный характер.
Проектный расчет используют ограниченно, например при предварительном опре-
делении основных размеров коленчатых валов кривошипных прессов по номи-
нальному усилию. В этом случае зависимость (23.2) решается относительно вектора
внутренних параметров X. Однако и при использовании проектного расчета ка-
чество принятых решений обязательно оценивается проверочным расчетом.
Таким образом, проверочный расчет является основным средством коли-
чественного обоснования принимаемых проектных решений. В этой части мате-
матическое моделирование не вносит в практику проектирования КШМ каких-
либо изменений, потому что анализ является по существу проверочным расче-
том. Основной смысл применения моделирования заключается в повышении
качества проектных решений на основе высокой достоверности результатов рас-
чета, возможности их получения в любом объеме, необходимом и достаточном
для принятия проектных решений.
Возможности современных ПК анализа динамических систем, в частности
ПА9,
позволяют выполнять исчерпывающий динамический анализ проектируе-
мого,
а потому еще реально не существующего устройства, улучшать его до по-
лучения работоспособного или оптимального варианта проектного решения или
503
Раздел
VL
АВТОМАТИЗАЦИЯ
ПРОЕКТИРОВАНИЯ КШМ
убеждаться в его невозможности при имеющемся ТЗ. ПК успешно преодолевают
проблемы многомассовости и нелинейности динамических систем. Число степе-
ней свободы, при котором с помощью ПК может быть получено решение анали-
зируемой задачи, достигает нескольких тысяч. Решение получается при наличии
в динамической системе проектируемого объекта элементов как с мягкой, так и
с жесткой нелинейностью, например типа Кулонова трения или зазоров в кине-
матических парах, когда характеристики элементов представляют собой недиф-
ференцируемые функции. При решении задачи анализа автоматически рас-
крывается статическая неопределимость, учитывается изменение числа степеней
свободы механических систем. Опыт решения практических задач подтверждает
достоверность получаемой с помощью ММ информации о процессах, проте-
кающих в проектируемом объекте.
Современные ПК предоставляют большие возможности и удобства для по-
лучения проектировщиком самой разнообразной информации о проектируемом
объекте без больших затрат труда и времени. Поэтому ПК анализа динамичес-
ких систем в настоящее время можно рассматривать как основное средство про-
ектирования КШМ.
Глава 24. ПРОЕКТИРОВАНИЕ КУЗНЕЧНО-
ШТАМПОВОЧНЫХ МАШИН
24.1.
Кривошипные прессы
Проектирование многозвенных исполнительных механизмов.
Проектирование многозвенных исполнительных механизмов кривошипных
прессов включает в себя:
1) синтез кинематической схемы;
2) предварительное назначение ее параметров, т. е. размеров элементов и их
исходных положений;
3) корректировку параметров кинематической схемы до получения желатель-
ных значений параметров закона движения ползуна.
Решение двух первых задач носит творческий характер и опирается на су-
ществующий опыт проектирования, общетехнические представления и интуи-
цию проектировщика (см. § 2.5). Решение третьей задачи поддается формали-
зации, а подходы к нему одинаковы для механизмов с любой кинематической
схемой. При этом к результатам проектирования на первых двух этапах не
предъявляют высоких требований в отношении их качества. Нужно полу-
чить лишь работоспособный вариант, который будет улучшен при решении
третьей задачи.
504
Глава 24.
Проектирование кузнечно-штамповочныхмашин
L3,a3
Ll,al
L8,a8
L9,a9
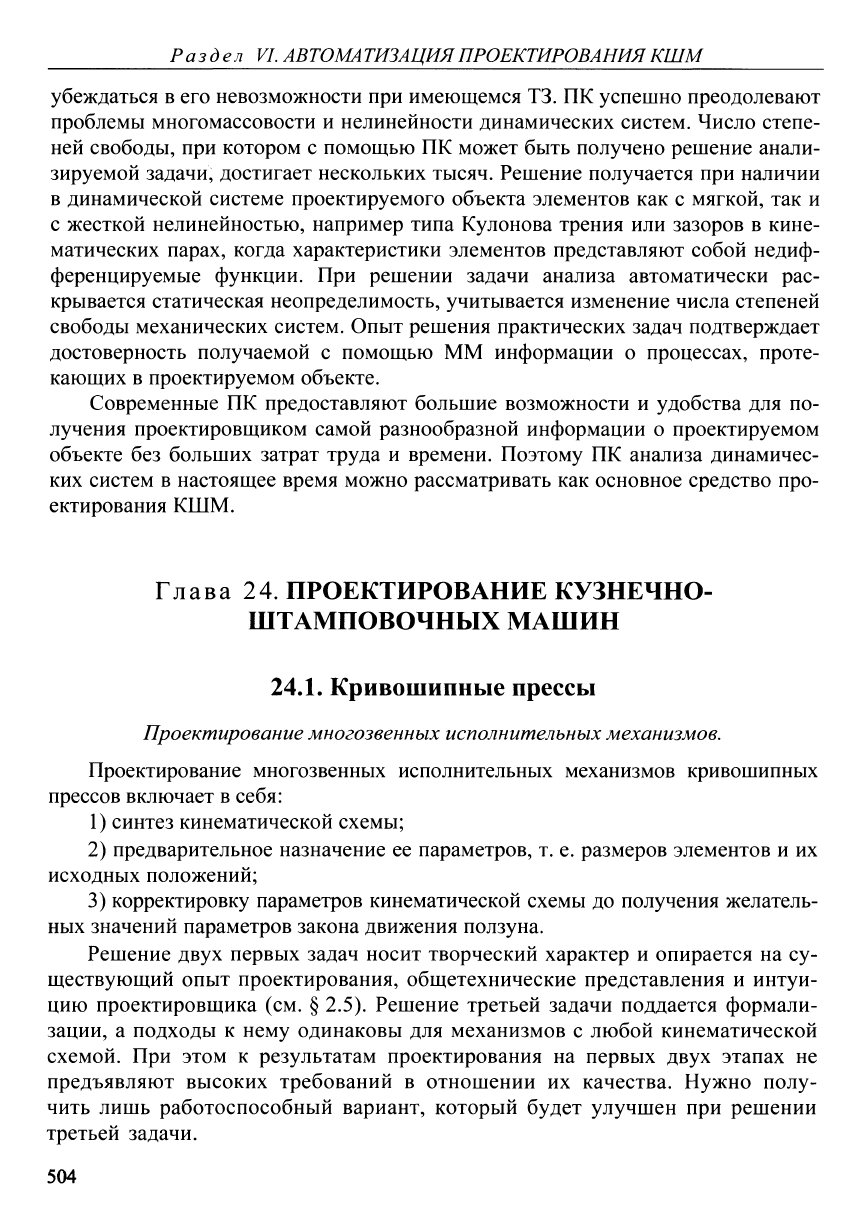
Рис.
24.1.
Кинематическая схема
ветви главного исполнительного
механизма четырехкривошипно-
го листоштамповочного пресса
простого действия
Список значений параметров закона дви-
жения ползуна определяется назначением ме-
ханизма. Исполнительные механизмы при-
жимных ползунов листоштамповочных прессов
должны обеспечивать необходимые значения
хода ползуна, угла опережения прижимного
ползуна, продолжительности выстаивания в ниж-
нем положении, отхода ползуна от крайнего
нижнего положения во время выстаивания,
а многозвенные главные исполнительные меха-
низмы самих прессов - необходимый ход и ми-
нимальную скорость ползуна при деформиро-
вании заготовки.
Проектирование многозвенного исполни-
тельного механизма рассмотрим на примере
главного исполнительного механизма четы-
рехкривошипного листоштамповочного пресса
простого действия (рис. 24.1). Исполнительный
механизм показан в положении, соответствующем положению ползуна в конце
хода вниз. Ход ползуна пресса 5тах ==0,8 м, начало деформирования соответст-
вует перемещению ползуна на 0,85'тах = 0,64 м.
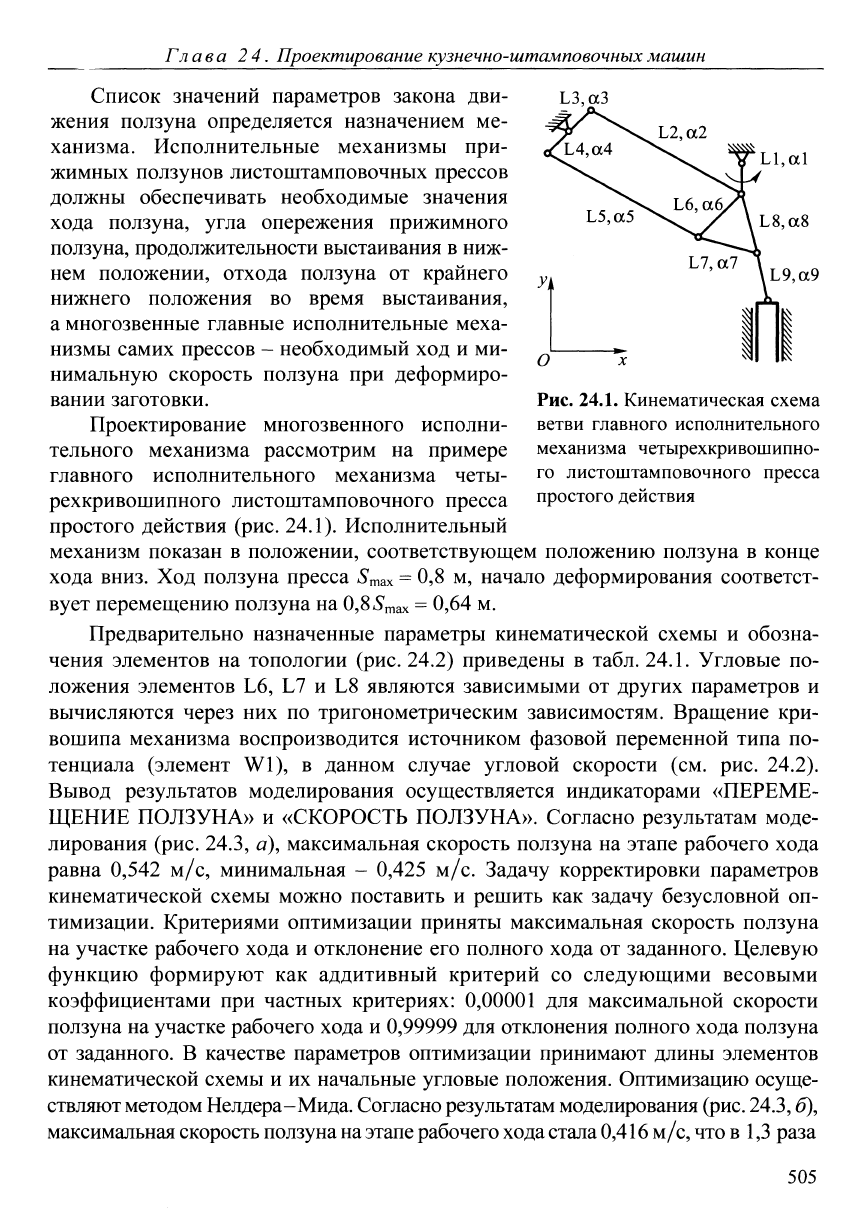
Предварительно назначенные параметры кинематической схемы и обозна-
чения элементов на топологии (рис. 24.2) приведены в табл. 24.1. Угловые по-
ложения элементов L6, L7 и L8 являются зависимыми от других параметров и
вычисляются через них по тригонометрическим зависимостям. Вращение кри-
вошипа механизма воспроизводится источником фазовой переменной типа по-
тенциала (элемент W1), в данном случае угловой скорости (см. рис. 24.2).
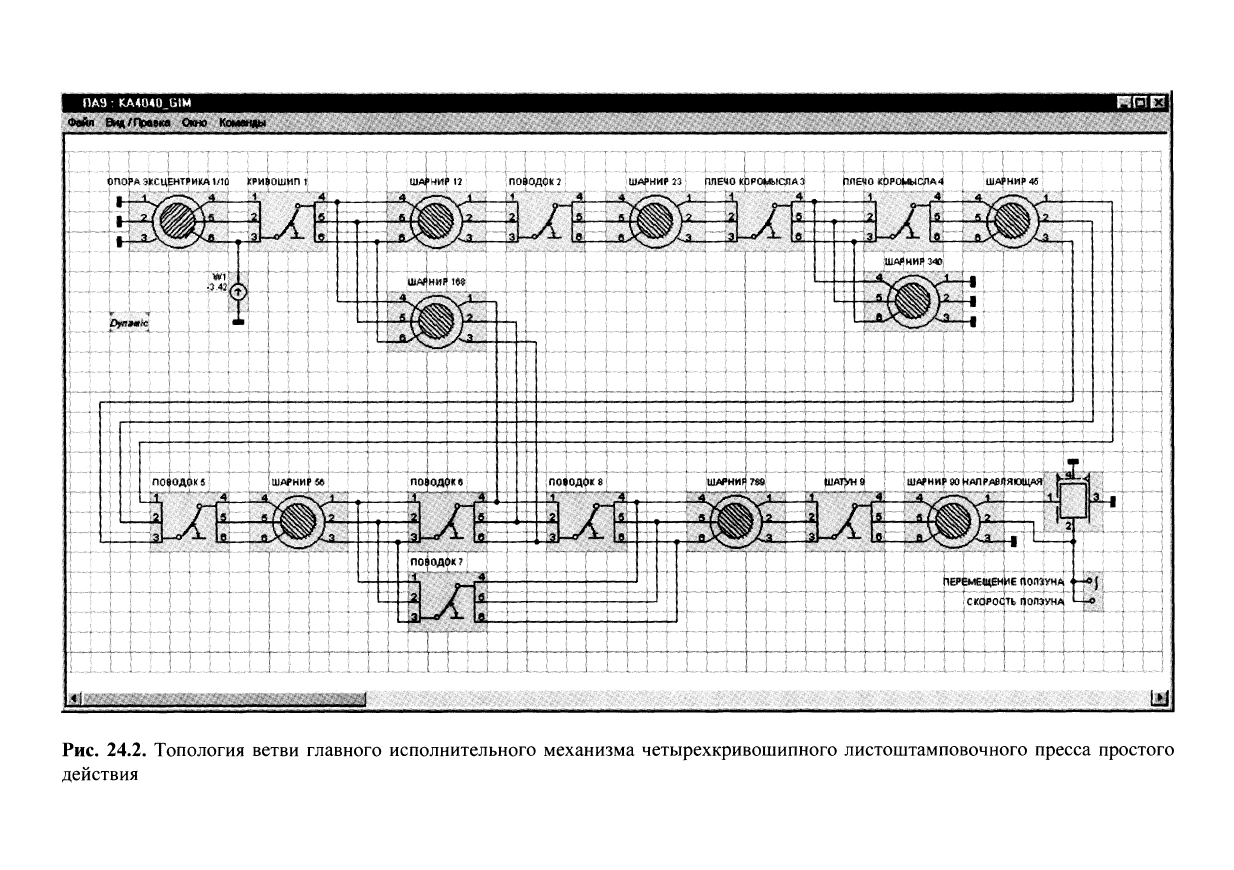
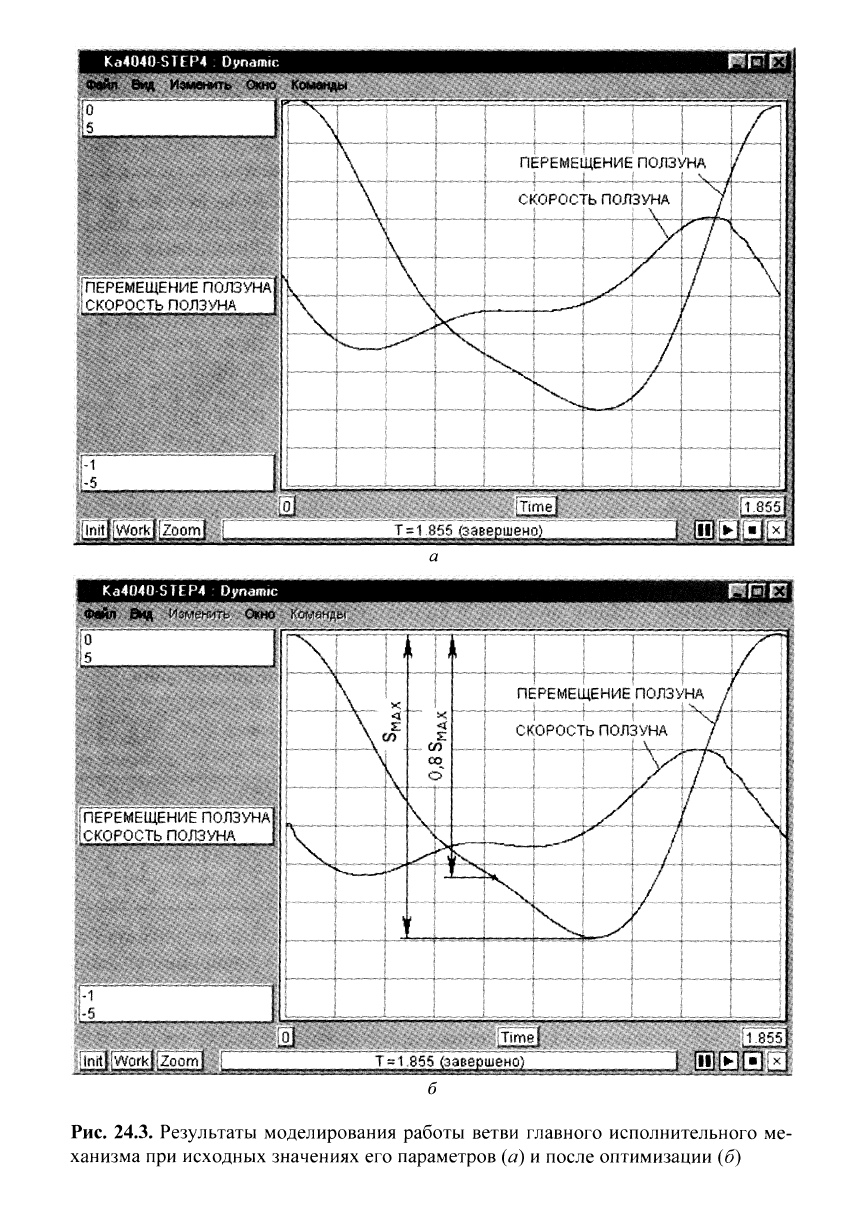
Вывод результатов моделирования осуществляется индикаторами «ПЕРЕМЕ-
ЩЕНИЕ ПОЛЗУНА» и «СКОРОСТЬ ПОЛЗУНА». Согласно результатам моде-
лирования (рис. 24.3, а), максимальная скорость ползуна на этапе рабочего хода
равна 0,542 м/с, минимальная - 0,425 м/с. Задачу корректировки параметров
кинематической схемы можно поставить и решить как задачу безусловной оп-
тимизации. Критериями оптимизации приняты максимальная скорость ползуна
на участке рабочего хода и отклонение его полного хода от заданного. Целевую
функцию формируют как аддитивный критерий со следующими весовыми
коэффициентами при частных критериях: 0,00001 для максимальной скорости
ползуна на участке рабочего хода и 0,99999 для отклонения полного хода ползуна
от заданного. В качестве параметров оптимизации принимают длины элементов
кинематической схемы и их начальные угловые положения. Оптимизацию осуще-
ствляют методом Нелдера-Мида. Согласно результатам моделирования
(рис.
24.3,
б),
максимальная скорость ползуна на
этапе
рабочего хода стала 0,416 м/с, что в 1,3 раза
505
ОАЭ : КА4(И0 ШЫ
^Шт ii^/r|Mifi^
<шт
Шшшш
0ГЮ1»АЭ»СЦЭ*ТРИ}«А1/1й №И90ШИП«
Ш1 Biiiiiilfc
\mfi^mv^ \2
(по^од^кз;
ШАРНИР 23}
t^mo
фройь{СТА;^
llgi
Рис.
24.2. Топология ветви главного исполнительного механизма четырехкривошипного листоштамповочного пресса простого
действия
1Са4040 STEP4
;
O^oaiwc
:!5
ПЕРЕМЕЩЕНИЕ ПОЛЗУНА
; СКОРОСТЬ
ПОЛЗУНА
-1
.-5
ШШШ!
Jlnipiv^rkjizoomf
[^
..-I.
^1МЗ.§ш%ш%^)....,.
и 8551
Ка4040 STEP4 Оупаиме
ШИШ;
-^#да''c-il^'':Шшwш.- ШФ
:о
1
!5
1
ПЕРЕМЕЩЕНИЕ П0'ЛЗУНД|
^СКОРОСТЬ ПОЛЗЖА
1
^
П
1
- tmmnm
V\.
-
-- Шш<^
^^^W9^W^P}1
1.^..,^...^.....^..^ш.^.^.^.
\
ж,
\
т
<
со
о"
f
ПЕРЕМЕЩЕНИЕ ПОЛЗУНА
/ |
;
СКОРОСТЬ
ПОЛЗУНА
У ' 1
"х:7
•
1
1
:-%",;{j^-
^..^-г_>:г5
=^^mej:3
----;-
_.--: '-'
'--"°:
--
JlJilf
„Л-^х^йалаЕшшш.™^^
Рис. 24.3. Результаты моделирования работы ветви главного исполнительного ме-
ханизма при исходных значениях его параметров (а) и после оптимизации (б)
Раздел
VI.
АВТОМАТИЗЛЦИЯПРОЕКТИРОВАНИЯКШМ
Таблица
24.1.
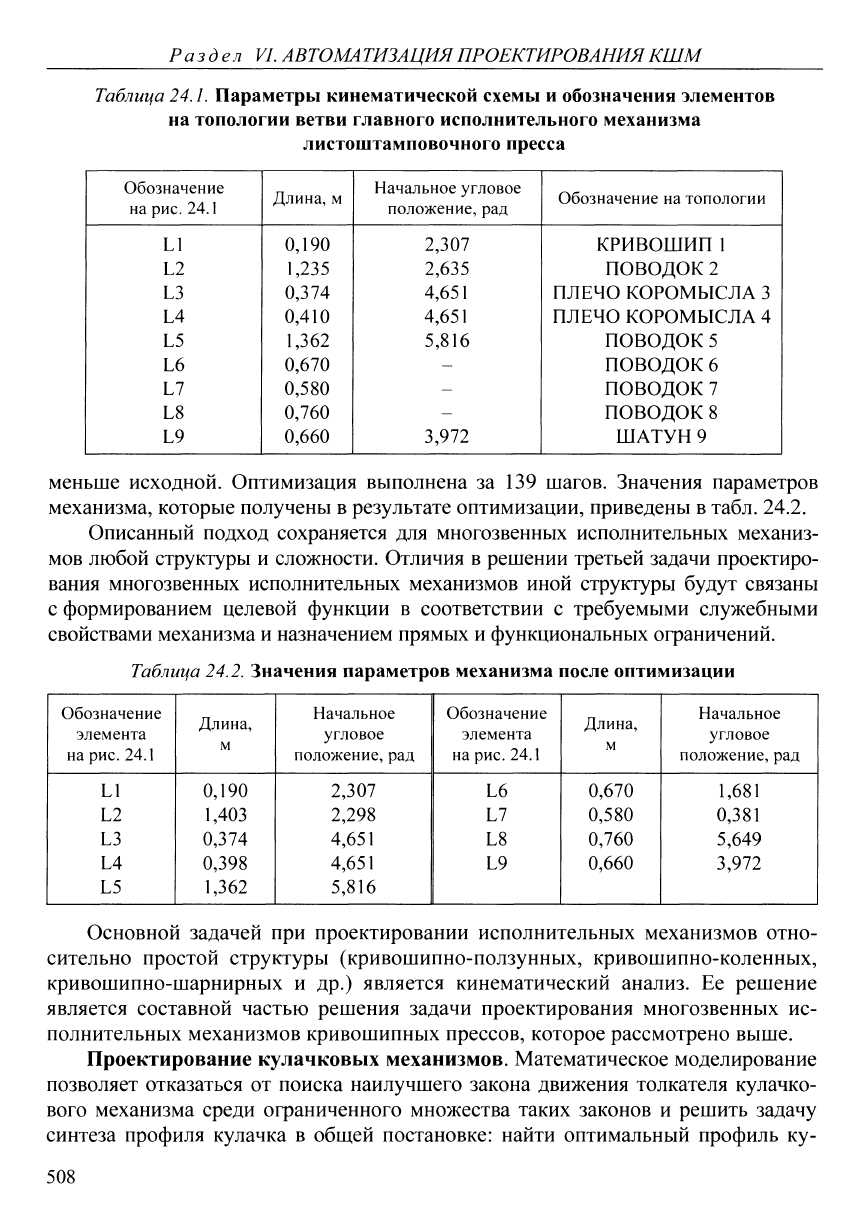
Параметры кинематической схемы и обозначения элементов
на топологии ветви главного исполнительного механизма
листоштамповочного пресса
Обозначение
на
рис.
24.1
L1
L2
L3
L4
L5
L6
L7
L8
L9
Длина, м
0,190
1,235
0,374
0,410
1,362
0,670
0,580
0,760
0,660
Начальное угловое
положение, рад
2,307
2,635
4,651
4,651
5,816
-
-
-
3,972
Обозначение на топологии
КРИВОШИП 1
ПОВОДОК 2
ПЛЕЧО КОРОМЫСЛА 3
ПЛЕЧО КОРОМЫСЛА 4
ПОВОДОК 5
ПОВОДОК 6
ПОВОДОК 7
ПОВОДОК 8
ШАТУН 9
меньше исходной. Оптимизация выполнена за 139 шагов. Значения параметров
механизма, которые получены в результате оптимизации, приведены в табл. 24.2.
Описанный подход сохраняется для многозвенных исполнительных механиз-
мов любой структуры и сложности. Отличия в решении третьей задачи проектиро-
вания многозвенных исполнительных механизмов иной структуры будут связаны
с формированием целевой функции в соответствии с требуемыми служебными
свойствами механизма и назначением прямых и функциональных ограничений.
Таблица 24.2. Значения параметров механизма после оптимизации
Обозначение
элемента
на рис. 24.1
L1
L2
L3
L4
L5
Длина,
0,190
1,403
0,374
0,398
1,362
Начальное
угловое
положение, рад
2,307
2,298
4,651
4,651
5,816
Обозначение
элемента
на
рис.
24.1
L6
L7
L8
L9
Длина,
м
0,670
0,580
0,760
0,660
Начальное
угловое
положение, рад
1,681
0,381
5,649
3,972
Основной задачей при проектировании исполнительных механизмов отно-
сительно простой структуры (кривошипно-ползунных, кривошипно-коленных,
кривошипно-шарнирных и др.) является кинематический анализ. Ее решение
является составной частью решения задачи проектирования многозвенных ис-
полнительных механизмов кривошипных прессов, которое рассмотрено выше.
Проектирование кулачковых механизмов. Математическое моделирование
позволяет отказаться от поиска наилучшего закона движения толкателя кулачко-
вого механизма среди ограниченного множества таких законов и решить задачу
синтеза профиля кулачка в общей постановке: найти оптимальный профиль ку-
508
Глава 24, Проектирование кузнечно-штамповочныхмашин
лачка по выбранному критерию или их совокупности. Для этого конструк-
тивный профиль кулачка задают в полярной системе координат значениями
угловых координат, которые отсчитывают от точки, принятой в качестве на-
чальной, и их радиусов-векторов. Координаты вводят как параметры матема-
тической модели кулачкового механизма KULMD. Участки профиля между
точками, задающими конструктивный профиль кулачка, определяются куби-
ческими сплайнами:
р/
= р/о + р/ i(a - а/о) + р/2(ос - a/of + р/з(а - а/о)^
при а/о <а<а(/+1)о,
где р/, а - текущий радиус-вектор и угловая координата какой-либо точки про-
филя кулачка; р/о, р/ь Р/2 и р/з - коэффициенты сплайна; / - порядковый номер
участка профиля между соседними точками, задающими профиль; а/о - началь-
ная точка /-Г0 участка профиля.
Сплайны рассчитываются в математической модели кулачкового механизма
из условия непрерывности функции, описывающей весь профиль кулачка, а также
первой и второй ее производных по угловой координате и используются для вы-
числения в модели координат точек контакта (при его наличии) ролика с ку-
лачком. Весь профиль кулачка в общем случае состоит из участков постоянного
радиуса и рабочих участков. Основой методики синтеза профиля кулачка является
его оптимизация на каждом из рабочих участков по одному или нескольким кри-
териям. Первоначально каждый из оптимизируемых участков задают крайними
точками. Затем выполняют моделирование.
Оптимизируемый участок делится в угловом отношении пополам с полу-
чением при этом новой точки участка. По коэффициентам сплайна вычисля-
ется радиус-вектор этой дополнительной точки. Проводится оптимизация
профиля по выбранному критерию с принятием новой точки в качестве управ-
ляемого параметра. Каждый из участков, полученных при делении рабочего
участка, вновь делится пополам с образованием новых точек профиля - второй
этап оптимизации. На этом и последующих этапах радиус-векторы всех новых
точек принимаются в качестве управляемых параметров. Каждый следующий
этап оптимизации выполняется после очередного деления участков. Синтез
профиля кулачка проиллюстрируем на трех примерах.
1.
Найти профиль кулачка привода механизма выталкивателя штамповочно-
го автомата, обеспечивающий минимальное значение контактных сил в паре
кулачок - ролик и повышающий долговечность механизма. Кинематическая схе-
ма механизма приведена на рис. 24.4.
Синтез профиля кулачка выполним с помощью математической модели ме-
ханизма. Соответствие элементов кинематической схемы и топологии механизма
(рис.
24.5) показано в табл. 24.3. Для оптимизации профиля кулачка используем
метод Гаусса-Зейделя.
509