Zdunkowski W., Bott A. Dynamics of the atmosphere: A course in theoretical meteorology
Подождите немного. Документ загружается.

M2.5 Tensor algebra 41
Often it may be desirable to involve the scalar measure numbers in the scalar
product of two dyadics. Usually it is of advantage to use the reciprocal system of
basis vectors:
· = A
m
n
q
m
q
n
·q
p
q
r
B
p
r
= A
m
n
B
n
r
q
m
q
r
= C
m
r
q
m
q
r
(M2.101)
The two scalar quantities are summed over n to give C
i
j
= A
i
n
B
n
j
. This result
corresponds to the rules of matrix multiplication. The elements of the ith row are
multiplied by the elements of the j th column.
Next we wish to point out that the conjugate of the scalar product of two dyadics
is equal to the scalar product of the individual conjugate dyadics:
· =
·
(M2.102)
Of great importance is the following equation:
E· = ·E = (M2.103)
showing that the scalar product of a dyadic with the unit dyadic results in the dyadic
itself. Therefore, taking the scalar product of an abitrary dyadic with the unit dyadic
is commutative. The proofs of (M2.102) and (M2.103) are straightforward and are,
therefore, omitted.
Consider the double-dot product of
= B
n
q
n
and = D
r
q
r
. The double-dot
product of the two dyadics involves the scalar product of reciprocal basis vectors:
·· = B
n
q
n
··D
r
q
r
= B
m
n
q
m
q
n
··D
p
r
q
p
q
r
= B
m
n
D
p
r
(q
n
·q
p
)(q
m
·q
r
) = B
m
n
D
n
m
= C
m
m
(M2.104)
Hence, it can be seen that the double-dot product simply gives the trace of the
matrix (C
i
j
). From (M2.81) and (M2.104) we see that
·· = ·· = (·)
I
= C
m
m
(M2.105)
On substituting into this expression
= E we obtain the important result
··E = E·· = (·E)
I
=
I
(M2.106)
The validity of
··
= ·· (M2.107)
may easily be verified and is left as a simple excercise.
Of particular interest, as we shall see in our study of thermodynamics, is the
double scalar product of a symmetric and an antisymmetric dyadic. Using equation
(M2.107) and applying the definitions of the symmetric and antisymmetric dyadics
leads us to conclude that the double scalar product must vanish for consistency, as
shown in
··
=
··
=−
··
= 0
(M2.108)
42 Vector functions
M2.6 Problems
M2.1: Show that
A × r = r·
where
is an antisymmetric dyadic. Find
.
M2.2: By utilizing (M2.97) show that
··
is positive definite.
M2.3: Show the validity of the following expressions:
(a)
×
· = ·
×
, (b)
(
a
)
×
=
×
·
M2.4: Find the eigenvalues and eigenvectors of the eigenvalue problem
(
− λE)·r = 0, (
ij
) =
2 −10
−12−1
0 −12
where
ij
is the matrix corresponding to . Hint: One eigenvalue is λ
1
= 2.
M3
Differential relations
Many mathematical statements of the laws of physics involve differential or integral
expressions. Therefore, we must be able to differentiate and integrate expressions
involving vectors and dyadics. While in the Cartesian nonrotating coordinate sys-
tem the basis vectors i, j,andk may be treated as constants, basis vectors in
generalized coordinate systems depend on spatial coordinates and may depend on
time.
M3.1 Differentiation of extensive functions
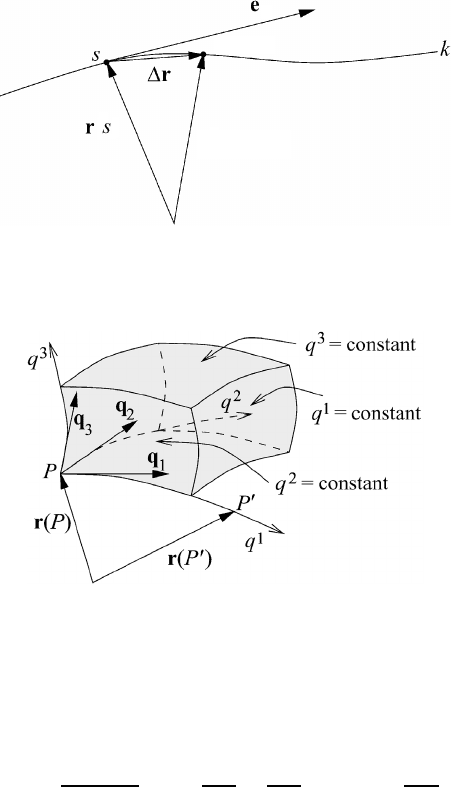
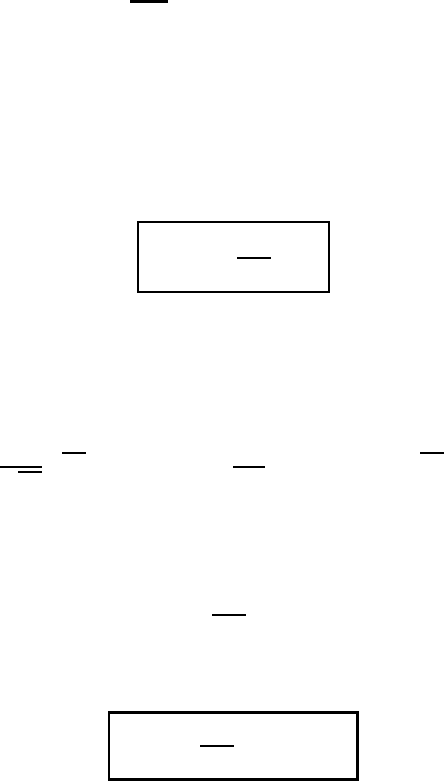
Let us consider a curve k in space as shown in Figure M3.1. From some origin
we draw the position vector r(s) to the point s on the curve. Upon advancing the
arclength s along the curve, the new position vector will be r(s +s). Applying
the definition of the derivative
dr
ds
= lim
s→0
|
r
|
e
r
s
= lim
s→0
s e
r
s
= e
r
= e
T
(M3.1)
we obtain the unit tangent vector e
T
on the curve at point s.
When we are differentiating products involving vectors and dyadics we must
observe the sequence of the factors. An example is given by
d
ds
(A·
·B) =
dA
ds
·
·B + A·
d
ds
·B + A·
·
dB
ds
(M3.2)
Suppose that we wish to differentiate the vector A with respect to the parameter s.
In this case we must differentiate not only the scalar measure number A
i
but also
the basis vector q
i
, since this vector varies in space:
dA
ds
=
d
ds
(A
n
q
n
) =
dA
n
ds
q
n
+ A
n
dq
n
ds
(M3.3)
43
44 Differential relations
T
)(
( )
r(s+∆s)
s+∆ s
Fig. M3.1 The unit tangent vector e
T
along a curve k in space.
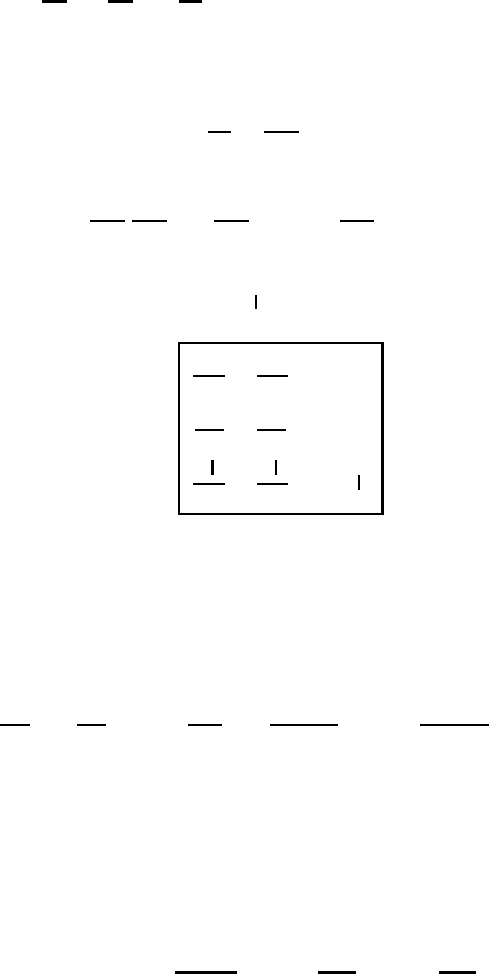
Fig. M3.2 A volume element of the generalized q
i
system.
An important example is the scalar product of the unit vectors, e
A
·e
A
. Differentiation
of this expression with respect to s shows that the derivative de
A
/ds is perpendicular
to e
A
e
A
·e
A
= 1 =⇒
d(e
A
·e
A
)
ds
= e
A
·
de
A
ds
+
de
A
ds
·e
A
= 2e
A
·
de
A
ds
= 0(M3.4)
Let us now consider a volume element defined by sections of the contravariant
curvilinear coordinate lines q
i
as shown in Figure M3.2. Note that the coordinate
line q
1
is formed by the intersection of the coordinate surfaces q
2
= constant
and q
3
= constant in the same way as that in which the x-axis of the orthogonal
Cartesian system is formed by the intersection of the surfaces y = constant and
z = constant. Analogously, the coordinate lines q
2
and q
3
areformedbythein-
tersection of the two other coordinate surfaces. The covariant basis vectors q
i
are
tangent vectors along the respective coordinate lines. The orientation of the basis
vectors q
i
at a given point P differs from the orientation of the basis vectors at
another point P
. All vectors existing at point P have to be defined with respect
M3.1 Differentiation of extensive functions 45
to the basis existing at that point. In general, every point P
that is separated by a
finite distance from point P has a different basis so that all vectors defined at point
P
must be expressed in terms of the basis existing at P
.
In the general q
i
-coordinate system all quantities depend on the spatial coordi-
nates q
i
(i = 1, 2, 3) and on time t. Hence, we write
ψ = ψ(q
1
,q
2
,q
3
,t) = ψ(q
i
,t)
A = A
n
q
n
= A
n
(q
i
,t)q
n
(q
i
,t)
= φ
m
n
(q
i
,t)q
m
(q
i
,t)q
n
(q
i
,t)
(M3.5)
showing the explicit dependency of ψ, A
i
, φ
i
j
and of the basis vectors q
i
, q
j
on
q
i
(i = 1, 2, 3) and t.
According to the rules of differential calculus, we may write the individual total
differentials of ψ, A,
in the forms
dψ =
∂ψ
∂t
dt +
∂ψ
∂q
n
dq
n
dA =
∂A
∂t
dt +
∂A
∂q
n
dq
n
d =
∂
∂t
dt +
∂
∂q
n
dq
n
(M3.6)
We often call these expressions the total differentials or sometimes the individual
differentials of the corresponding variables. It can be seen that the total differential
consists of two parts. The first term represents the change with time of the variable
at a fixed point in space. Usually the partial derivative with respect to time ∂/∂t
is called the local time derivative. The second terms on the right-hand sides of
(M3.6) are the so-called geometric differentials of the variables, which are usually
abbreviated as follows:
d
g
ψ =
∂ψ
∂q
n
dq
n
d
g
A =
∂A
∂q
n
dq
n
d
g
=
∂
∂q
n
dq
n
(M3.7)
Now we wish to investigate the relationship between the position vector r and
the basis vectors. Let us begin with the simple orthogonal Cartesian coordinate
system. For a fixed time the differential dr of the position vector r = r(x
1
,x
2
,x
3
)
46 Differential relations
can be written as
dr = i
n
dx
n
= i
1
dx
1
+ i
2
dx
2
+ i
3
dx
3
=
∂r
∂x
n
dx
n
=
∂r
∂x
1
dx
1
+
∂r
∂x
2
dx
2
+
∂r
∂x
3
dx
3
(M3.8)
By comparing the differentials dx
i
of this equation we obtain the basic definition
of the unit vectors in the Cartesian system:
i
1
=
∂r
∂x
1
, i
2
=
∂r
∂x
2
, i
3
=
∂r
∂x
3
(M3.9)
Similarly, by expressing the position vector in the general curvilinear coordinate
system, we find for a fixed time t
dr = q
n
dq
n
=
∂r
∂q
n
dq
n
(M3.10)
and the basic definition of the covariant basis vector q
i
q
i
=
∂r
∂q
i
(M3.11)
The unit vector e
i
is given as
e
i
=
q
i
|
q
i
|
=
q
i
√
g
ii
=
1
√
g
ii
∂r
∂q
i
(M3.12)
Using the definition (M3.11), the scalar triple product formed by the covariant basis
vectors may be written as
1
√
g
q
= [q
1
, q
2
, q
3
] =
∂r
∂q
1
,
∂r
∂q
2
,
∂r
∂q
3
(M3.13)
and, by means of equation (M1.40), in the explicit form
√
g
q
=
√
g
x
∂x
1
∂q
1
∂x
2
∂q
1
∂x
3
∂q
1
∂x
1
∂q
2
∂x
2
∂q
2
∂x
3
∂q
2
∂x
1
∂q
3
∂x
2
∂q
3
∂x
3
∂q
3
=
∂(x
1
,x
2
,x
3
)
∂(q
1
,q
2
,q
3
)
(M3.14)
1
Here and in the following, subscripts q or x (or others) denote the particular coordinate system in which the
corresponding variable has to be evaluated. They will, however, be used only if confusion is likely.
M3.1 Differentiation of extensive functions 47
The determinant of this expression is known as the functional determinant of the
transformation from the initial Cartesian x
i
-coordinate system to the general q
i
system. The term
√
g
x
is the functional determinant of the Cartesian system with
√
g
x
= [i
1
, i
2
, i
3
] = 1. The g
ij
q
of the square of the functional determinant are
g
ij
q
= q
i
·q
j
=
∂r
∂q
i
·
∂r
∂q
j
=
∂i
n
x
n
∂q
i
·
∂i
m
x
m
∂q
j
=
∂x
n
∂q
i
∂x
n
∂q
j
(M3.15)
Whenever the relationship between the Cartesian x
i
-coordinate system and the q
i
system is given, it is a simple matter to evaluate this equation.
In analogy to the definition of the covariant basis vector q
i
we define the con-
travariant basis vector q
i
. From the basic definition
dr =
∂r
∂q
n
dq
n
= q
n
dq
n
(M3.16)
and comparing the coefficients of the differential dq
i
, we easily find
q
i
=
∂r
∂q
i
= g
in
q
q
n
(M3.17)
where the second equality is the lowering rule according to (M1.84). If the three
covariant basis vectors q
i
are known as well as the contravariant metric fundamental
quantities g
ij
q
, then the basis vectors q
i
may be computed.
There is a very important point that needs to be mentioned. The contravariant
coordinate lines of the curvilinear system are continuous coordinate lines so that
∂
2
∂q
i
∂q
j
=
∂
2
∂q
j
∂q
i
(M3.18)
applies. In this case the order of the partial derivatives is immaterial. Owing to the
properties of the reciprocal coordinate systems, the covariant coordinate lines can
be defined only piecewise. Therefore, as is shown in textbooks on analysis, the
order of the differentiation cannot be interchanged:
∂
2
∂q
i
∂q
j
=
∂
2
∂q
j
∂q
i
(M3.19)
For this reason we prefer partial derivatives with respect to the contravariant co-
ordinates q
i
. In a later chapter we will encounter this situation involving (M3.19)
when we are dealing with natural coordinates.
48 Differential relations
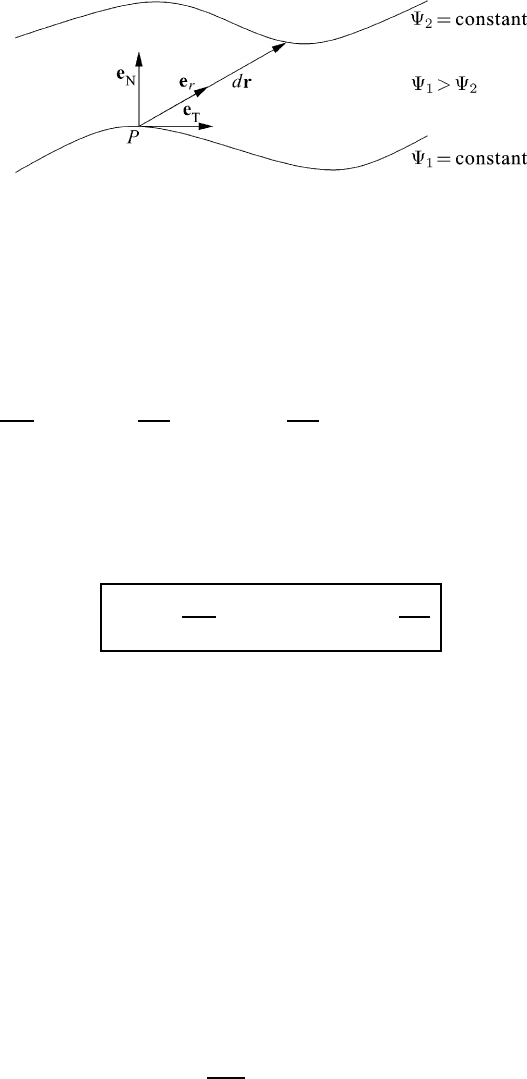
Fig. M3.3 The geometric meaning of the gradient operator.
M3.2 The Hamilton operator in generalized coordinate systems
Let us reconsider the geometric differential of a scalar field function as given in
(M3.7). By inserting the scalar product q
i
·q
i
, which does not change the meaning
of d
g
ψ, we obtain
d
g
ψ =
∂ψ
∂q
n
dq
n
=
3
i=1
∂ψ
∂q
i
dq
i
=
3
i=1
∂ψ
∂q
i
q
i
·
q
i
dq
i
=∇ψ ·dr (M3.20)
Here we have introduced the Hamilton operator ∇, which is also known as the
gradient operator,thedel operator,andthenabla operator. Thus, in general
coordinates we define ∇ by
∇=q
n
∂
∂q
n
= q
n
∇
n
, ∇
i
=
∂
∂q
i
(M3.21)
where we have also introduced the symbol ∇
i
to remind the reader that the partial
derivative ∂/∂q
i
is a covariant expression while q
i
itself is a contravariant coordi-
nate. The meaning of the nabla operator is twofold: First, it is a vector; and second,
it is a differential operator.
Now we consider the two scalar surfaces shown in Figure M3.3. At the point P
we construct the displacement vector dr = e
r
dr as well as the unit normal vector
e
N
and a unit tangent vector e
T
along the surface ψ
1
= constant. These two unit
vectors are perpendicular to each other.
We slightly rewrite equation (M3.20) in the form
d
g
ψ = dr·∇ψ = e
r
dr·∇ψ (M3.22)
so that the geometric change d
g
ψ/dr is expressed by
d
g
ψ
dr
= e
r
·∇ψ (M3.23)
M3.2 The Hamilton operator in generalized coordinate systems 49
If we select the displacement vector dr at P along the surface ψ
1
= constant, i.e.
e
r
= e
T
, then the geometric change vanishes:
e
T
·∇ψ = 0(M3.24)
Therefore, the vectors ∇ψ and e
T
are perpendicular to each other and ∇ψ is parallel
to the unit normal vector e
N
:
∇ψ = e
N
|
∇ψ
|
(M3.25)
that is ∇ψ is perpendicular to the surface ψ = constant. Moreover, choosing
dr = e
N
dr
N
means that the magnitude of ∇ψ corresponds to the geometric change
d
g
ψ along e
N
:
d
g
ψ
dr
N
= e
N
·∇ψ =
|
∇ψ
|
(M3.26)
If the ψ-surfaces are closely spaced, then the ψ-gradient is strong and vice versa.
Let us return to the contravariant basis vectors q
i
, whose directions are known if
the directions of the covariant basis vectors q
i
are known, as follows from (M1.55)
for the reciprocal systems. By utilizing the definition of the nabla operator we
have another way to obtain the direction of the contravariant basis vectors. From
(M3.21) it follows immediately that
∇q
i
= q
n
∂q
i
∂q
n
= q
i
(M3.27)
Often it is desirable to express the gradient operator in terms of the unit vectors
e
i
instead of employing the general basis vectors q
i
. By obvious steps we introduce
the unit vector e
i
, which automatically leads to the introduction of the covariant
physical measure numbers ∇
*
i
of the Hamilton operator:
q
i
∇
i
=
q
i
g
ii
g
ii
∇
i
= e
i
∇
*
i
= e
i
∂
∂q
*
i
with ∇
*
i
=
g
ii
∇
i
(M3.28)
Whenever we are dealing with orthogonal systems, it is advantageous to employ
the gradient operator in the form
∇=e
n
∂
∂q
*
n
= e
n
∇
*
n
(M3.29)
Application of the gradient operator to the position vector r yields the unit
dyadic
E:
∇r = q
n
∂r
∂q
n
= q
n
q
n
= E
(M3.30)
50 Differential relations
where use of (M3.11) has been made. In the special case of the orthogonal Cartesian
system we obtain
∇r =
i
∂
∂x
+ j
∂
∂y
+ k
∂
∂z
(ix + jy + kz) = ii + jj + kk =
E (M3.31)
Let us now return to the total derivatives (M3.6). Introducing the velocity
vector v,
v =
dr
dt
=
dq
n
dt
q
n
= ˙q
n
q
n
(M3.32)
we may write
dq
n
dt
∂ψ
∂q
n
=
dq
n
dt
q
n
·
q
n
∂ψ
∂q
n
= v·∇ψ (M3.33)
The scalar product v·∇ψ is known as the advection term. Substituting (M3.33) and
corresponding expressions for A and
into (M3.6) yields
dψ
dt
=
∂ψ
∂t
+ v·∇ψ
dA
dt
=
∂A
∂t
+ v·∇A
d
dt
=
∂
∂t
+ v·∇
(M3.34)
These equations are known as the Euler development of the corresponding variables.
The Euler development applies not only to scalar field functions, vectors, and
dyadics, but also to higher-order tensors.
Before concluding this section let us briefly apply Euler’s development to the
vector A:
dA
dt
=
∂A
∂t
q
i
+ ˙q
n
∂A
∂q
n
=
∂A
m
q
m
∂t
q
i
+ ˙q
n
∂A
m
q
m
∂q
n
(M3.35)
As will be realized by now, in contrast to the Cartesian coordinate system, the basis
vectors q
i
of the general q
i
system are functions of the spatial coordinates q
i
and
of time. Thus, in the general case the gradient of the vector A, which is also known
as the local dyadic of A, must be written as
∇A =∇(A
n
q
n
) = (∇A
n
)q
n
+ A
n
(∇q
n
)
= q
m
∂A
n
q
n
∂q
m
= q
m
q
n
∂A
n
∂q
m
+ A
n
q
m
∂q
n
∂q
m
(M3.36)