Wilkinson D.J. Stochastic Modelling for Systems Biology
Подождите немного. Документ загружается.

184
BEYOND THE GILLESPIE ALGORITHM
on
it
being
greater
than
t).
Again,
a
combination
of
the
memory
less
property
and
the
rescaling property (Proposition 3.20) ensures that this is okay.
The next thing worth noting is that it is assumed that the algorithm
"knows" which
hazards are affected by each reaction. Gibson
& Bruck (2000) suggest that this is
done by creating a
"dependency graph" for the system. The dependency graph has
nodes corresponding to each reaction in the system. A directed arc joins node
i to
node
j
if
a reaction event
of
type i induces a change
of
state that affects the hazard
for the reaction
of
type
j.
These can be determined (automatically) from the forms
of
the associated reactions. Using this graph,
if
a reaction
of
type i occurs, the set
of
all children
of
node i in the graph gives the set
of
hazards that needs to be updated.
An interesting alternative to the dependency graph is to work directly on the Petri
net representation
of
the system. Then, for a given reaction node, the set-of all "neigh-
bours"
(species nodes connected to that reaction node), X is the set
of
all species that
can
be
altered. Then the set
of
all reaction nodes that are "children"
of
a node in X
is the set
of
all reaction nodes whose hazards may need updating. This approach is
slightly conservative in that the resulting set
of
reaction nodes is a superset
of
the set
which absolutely must be updated, but nevertheless represents a satisfactory alterna-
tive.
This algorithm is now
"local" in the sense that all computations (bar one) involve
only adjacent nodes on the associated Petri net representation
of
the problem. The
only remaining
"global" computation is the location
of
the index
of
the smallest re-
action time. Gibson and Bruck's clever solution to this problem is to keep all reaction
times (and their associated indices) in an
"indexed priority queue." This is another
graph, allowing searches and changes to be made using only fast and local operations;
see the original paper for further details
of
exactly how this is done. The advantage
of
having local operations on the associated Petri net is that the algorithm becomes
straightforward to implement in an event-driven object-oriented programming style,
consistent with the ethos behind the Petri net approach. Further, such
an
implementa-
tion could be multi-threaded on an
SMP or hyper-threading machine, and would also
lend itself to a full message-passing implementation on a parallel computing cluster.
For further information on parallel stochastic simulation, see Wilkinson
(2005).
This algorithm is more efficient than Gillespie's direct method in the sense that
only one new random number needs to be simulated for each reaction event which
takes place, as opposed to the two that are required for the Gillespie algorithm. Note
however, that selective recalculation
of
the hazards, hi(X, Ci) (and the cumulative
hazard
ho(x,
c)), is also possible (and highly desirable) for the Gillespie algorithm,
and could speed up that algorithm enormously for large systems. Given that the Gille-
spie algorithm otherwise requires fewer operations than the next reaction method,
and does not rely on the ability to efficiently store putative reaction times in an in-
dexed priority queue, the relative efficiency
of
a cleverly implemented direct method
and the next reaction method is likely to depend on the precise structure
of
the model
and the speed
of
the random number generator used.
EXACT SIMULATION METHODS
185
8.2.3
Time-varying
volume
A problem that has so far been overlooked is that
of
reaction hazards that vary contin-
uously over time. The most common context for this to arise in a practical modelling
situation is when a growing cell (or cellular compartment) has its volume modelled
as
a continuous deterministic function
of
time. For example, let us suppose that the
container volume at
timet,
V(t),
is modelled as
V(t)
= v
0
+at,
t
2:
0,
(8.1)
for some constant a >
0.
If
the model contains any second-order reactions, the
hazards
of
these should be inversely proportional to
V(t)
(Section 6.2). The haz-
ards
of
first-order reactions are independent
of
volume and hence unaffected. What
to do about any zero-order reactions is somewhat unclear. As zero-order reactions
are typically used to model
"production"
or
"influx" in a simple-minded way, it is
conceivable that at least some zero-order reactions should have volume dependence.
Certain production rates might reasonably be considered to
be
directly proportional
to
V(t),
while influx equations might have hazards proportional to
V(t)
2
1
3
(as sur-
face area increases more slowly than volume). In general, zero-order reactions should
be
considered on a case-by-case basis.
In order to keep the presentation as straightforward as possible, we will just con-
sider modifying the (inefficient) first reaction method to take account
of
time-varying
reaction hazards.*
It
should
be
reasonably clear that since the only steps involving the
hazards are steps 2 and 3 that only steps 2 and 3 need modification. Since the hazard
is time varying, we should now write it
hi(x, ci, t), i = 1, 2,
...
, u. Now we could
simply run the algorithm using these time-depended hazards but otherwise unmodi-
fied. Unfortunately this will lead to an algorithm that is only approximately correct,
as
we would
be
essentially assuming that the hazards remain constant between each
reaction event, which
is
not actually true. At this point it is helpful to recall the in-
homogeneous
Poisson process (Section 5.4.4), as this is exactly what is needed for
dealing with non-constant hazards. Proposition 5.4 and the subsequent discussion tell
us
exactly how to simulate the time
of
the next event
of
an inhomogeneous Poisson
process, but note that the lower limit
of
the integral defining the cumulative hazard
must
be
the current simulation time, and not zero.
For concreteness consider a reaction with hazard h(t) =
a/V(t),
where a will
be
a function
of
x and
Ci,
but constant with respect
tot.
Suppose further that
V(t)
is
given by (8.1), the current simulation time is
t
0
,
and we wish to simulate the
timet'
of
the next reaction event.
We
begin by computing the cumulative hazard
H(t)
=it
h(t)dt
=it___!!:!!!:___
=!:log
(
vo
+at
) , t
2:
t
0
,
to
to
Vo +
at
a Vo + ato
and then compute the cumulative distribution function (CDF)
of
the time
of
the next
* The next reaction method (Gibson-Bruck algorithm) is also quite straightforward to modify. The direct
method (Gillespie algorithm) is actually a bit awkward to modify, and so the desire to work with time-
varying hazards is one reason why some people prefer to use an algorithm
in
the Gibson and Bruck
style. These issues are discussed in some detail in Gibson & Bruck (2000).
186
BEYOND
THE GILLESPIE
ALGORITHM
event as
F(t) =
1-
exp{-H(t)}
=
1-
(
Vo
+at
)-a/a,
vo
+ ato
t
~to.
Once
we
have the CDF we can simulate
u"'
U(O,
1)
and solve u = F(t')
fort',
the
time
of
the next event, to obtain
t'
=
~
[(vo
+
ato)u-afa-
vo].
Returning to the problem
of
modifying the first reaction method, one simply sim-
ulates putative times to the next event using the above strategy for any reactions with
time varying rates, and the rest
of
the algorithm remains untouched.
This provides an example
of
coupling a discrete stochastic process with a variable .
that changes continuously in time. Essentially the same strategy is used in several
of
the hybrid algorithms to
be
considered in Section 8.4, where some variables are
treated as discrete and others as varying continuously in time. A good understanding
of
the above technique is a necessary pre-requisite for understanding hybrid simula-
tion algorithms.
8.3 Approximate simulation strategies
8.3.1
TJme
discretisation
Gibson and Bruck's next reaction method is regarded by many to
be
the best avail-
able method for exact simulation
of
a stochastic kinetic model. However,
if
one is
prepared to sacrifice the exactness
of
the simulation procedure, there is a potential
for huge speed-up at the expense
of
a little accuracy. These fast approximate methods
are all based on a time discretisation
of
the Markov process.
The essential idea is that the time axis is divided into (small) discrete chunks, and
the underlying kinetics are approximated so that advancement
of
the state from the
start
of
one chunk to another can
be
made in one go. Most
of
the methods work on
the assumption that the time intervals have been chosen to be sufficiently small that
the reaction hazards can
be
assumed constant over the interval.
We
know that a point
process with constant hazard is a (homogeneous) Poisson process (Section 3.6.5).
Based on the definition
of
the Poisson process, we assume that the number
of
reac-
tions (of a given
type) occurring in a short time interval has a Poisson distribution
(independently
of
other reaction types).
We
can then simulate Poisson numbers
of
reaction events and update the system accordingly.
For a fixed (small) time step
D.t,
we can present an approximate simulation algo-
rithm as follows (we use the matrix notation from Section 2.3.2):
1. Initialise the problem with
timet
: = 0, rate constants
c,
state x, and stoichiometry
matrix
S.
2. Calculate /4(x, ct),
fori
= 1,
...
, v, and simulate the u-dimensional reaction
vectorr,
with ith entry a Po(hi(x,
ct)D.t)
random quantity.
3.
Update the state according to
x:
= x
+Sr.
APPROXIMATE SIMULATION STRATEGIES
pts
<-
function(N,
T=lOO,
dt=l,
...
)
{
tt=O
n=T%/%dt
X=N$M
S=t(N$Post
-
N$Pre)
u=nrow(S)
v=ncol(S)
xmat=matrix(O,
ncol=u,
nrow=n)
for
(i
in
l:n)
{
h=N$h(x,
...
)
r=rpois(v,
h*dt)
X = X +
(8
%*%
r)
xmat[i,)=x
ts(xmat,start=O,deltat=dt)
187
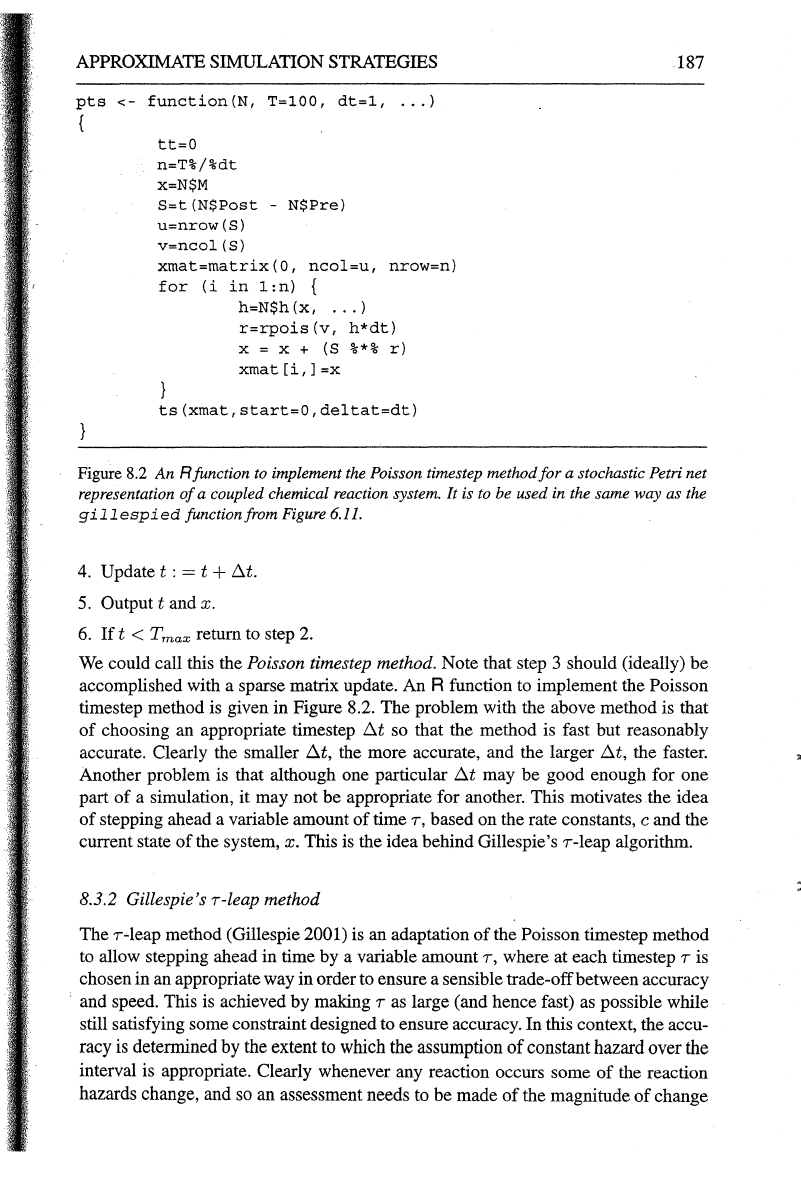
Figure 8.2
An
Rfunction
to
implement the Poisson timestep method for a stochastic Petri net
representation
of
a coupled chemical reaction system. It is to be used in the same way as the
gillespied
function from Figure 6.11.
4.
Update t : = t +
!:::.t.
5.
Output t and x.
6.
If
t < T
max
return to step
2.
We
could call this the Poisson timestep method. Note that step 3 should (ideally) be
accomplished with a sparse matrix update. An R function to implement the Poisson
timestep method is given in Figure 8.2. The problem with the above method is that
of
choosing an appropriate timestep
!:::.t
so that the method is fast but reasonably
accurate. Clearly the smaller
!:::.t,
the more accurate, and the larger
!:::.t,
the faster.
Another problem is that although one particular
!:::.t
may be good enough for one
part
of
a simulation, it may not be appropriate for another. This motivates .the idea
of
stepping ahead a variable amount
of
timeT, based on the rate constants, c and the
current state
of
the system, x. This is the idea behind Gillespie's T-leap algorithm.
8.3.2 Gillespie's T-leap method
The T-leap method (Gillespie
2001) is an adaptation
of
the Poisson timestep method
to allow stepping ahead in time by a variable amount
T,
where at each timestep
Tis
chosen in an appropriate way in order to ensure a sensible trade-off between accuracy
and speed. This
is
achieved by making T as large (and hence fast) as possible while
still satisfying some constraint designed to ensure accuracy. In this context, the accu-
racy
is
determined by the extent to which the assumption
of
constant hazard over the
interval is appropriate. Clearly whenever any reaction occurs some
of
the reaction
hazards change, and
so
an assessment needs
to
be made
of
the magnitude
of
change
188
BEYOND THE GILLESPIE ALGORITHM
of
the
hazards
hi(x,
Ci)·
Esserttially,
the
idea
is
to
chooser
so
that
the
(proportional)
change in all
of
the
hi(x,
ci) is small.
The simplest way to check that
a chosen r is satisfactory is to apply a post-leap
check. That is, after a leap
of
r,
check that lhi(x',
Ci)-
hi(x,
Ci)
I is sufficiently small
for each i (where
x and
x'
represent the state
of
the system before and after the leap).
If
any
of
the differences are too large, try again with a smaller value
of
r.
One
of
the
problems with this method is that it biases the system away from large yet legitimate
state changes.
A
pre-leap check seems more promising. Here we can calculate the expected new
state as
E (x') = x + E (r)
A,
where the
ith
element
of
E (r) is
just
hi(x,
ci)r.
We can then calculate the change in hazard at this "expected" new state and see
if
this is acceptably small (it should
be
noted that this is not necessarily the expected
change in hazard, due to the potential non-linearity
of
hi(x,
ci)). It is suggested that
the magnitude
of
acceptable change should be a fraction
of
the cumulative hazard
ho(x,
c),
i.e.,
lhi(x',ci)-
hi(x,ci)l:::;
cho(x,c),
Vi.
Gillespie provides an approximate method for calculating the largest r satisfying this
property (Gillespie
2001). Note that
if
the resulting r is as small (or almost as small)
as the expected time leap associated with an exact single reaction update, then it is
preferable to do
just
that. Since the time to the first event is
Exp(h
0
(x, c)); which has
expectation
1/ho(x,
c), one should always prefer an exact update
if
the suggested r
is less than (say)
2/ho(x,c).
Gillespie & Petzold (2003) consider refinements
of
this basic r selection algorithm
that improve its behaviour somewhat. However, in my opinion, the
"pure"
r-leap
method is always likely to
be
somewhat unsatisfactory in the context
of
biochemical
networks with very small numbers
of
molecules
of
some species (say, zero or one
copy
of
an activated gene).
On
the other hand, a hybrid algorithm known as the
max-
imal timestep method uses the
r-leap
method for some variables and not others. This
algorithm, which seems quite promising, will
be
briefly described in Section 8.4.2.
8.3.3 Diffusion approximation (chemical Langevin equation)
Another way
of
speeding up simulation is to simulate from the'diffusion approxi-
mation to the true process (Section 5.5). A formal discussion
of
this procedure is
beyond the scope
of
this book. However, we shall here content ourselves with deriv-
ing the form
of
the diffusion approximation using an intuitive procedure (which can
be
formalised with a little effort; see, for example Gillespie (2000)).
It
is clear from the discussion
of
the Poisson timestep method that the change
in state
of
the process, ·dXt in an infinitesimally small time interval dt is S dRt,
where
dRt
is
au-vector
whose
ith
element is a
Po(hi(Xt,
ci)dt) random quantity.
Matching the mean and variance, we put
dRt
~
h(x, c)dt +
diag
{ y'h(x, c)}
dWt,
where
h(x,
c) = (h1 (x, c1),
...
,
hv(x,
cv))', dWt is the increment
of
a v-d Wiener
process, and for a
p-d vector v,
diag
{ v} denotes the p x p matrix with the elements
APPROXIMATE
SIMULATION
STRATEGIES
189
of
v along the leading diagonal and zeros elsewhere.
We
now have the diffusion
approximation
dXt
=
SdRt
= S (
h(Xt,
c)dt +
diag
{
yfh(Xt,
c)}
dWt)
=>
dXt
=
Sh(Xt,
c)dt
+ S
diag
{
yfh(Xt,
c)}
dWt.
(8.2)
Equation (8.2) is one way
of
writing the chemical Langevin equation (CLE) for a
stochastic kinetic model.
t One slightly inconvenient feature
of
this form
of
the equa-
tion is that the dimension
of
Xt
(u)
is different from the dimension
of
the driving
process
Wt
(v). Since we will typically have v >
u,
there will
be
unnecessary
redundancy in the formulation associated with this representation. However, using
some straightforward multi-variate statistics (not covered
in
Chapter 3), it is easy
to see that the variance-covariance matrix for
dXt
is S
diag
{h(Xt,
c)}
S'
dt
(or
A'
diag
{h(Xt,
c)}
Adt).
So, (8.2) can
be
rewritten
dXt
=
Sh(Xt,
c)dt +
yfSdiag{h(Xt,
c)}
S'dWt,
(8.3)
where dWt now denotes the increment
of
a
u-d
Wiener process, and we use a com-
mon convention in statistics for the square root
of
a matrix.+
In
some ways (8.3)
represents a more efficient description
of
the CLE. However, there can
be
compu-
tational issues associated with calculating the square root
of
the diffusion matrix,
particularly when
S is rank degenerate (as is typically the case, due to conservation
laws
in
the system}, so both (8.2) and (8.3) turn
out
to
be
useful representations
of
the CLE, depending on the precise context
of
the problem, and both provide the basis
for approximate simulation algorithms.
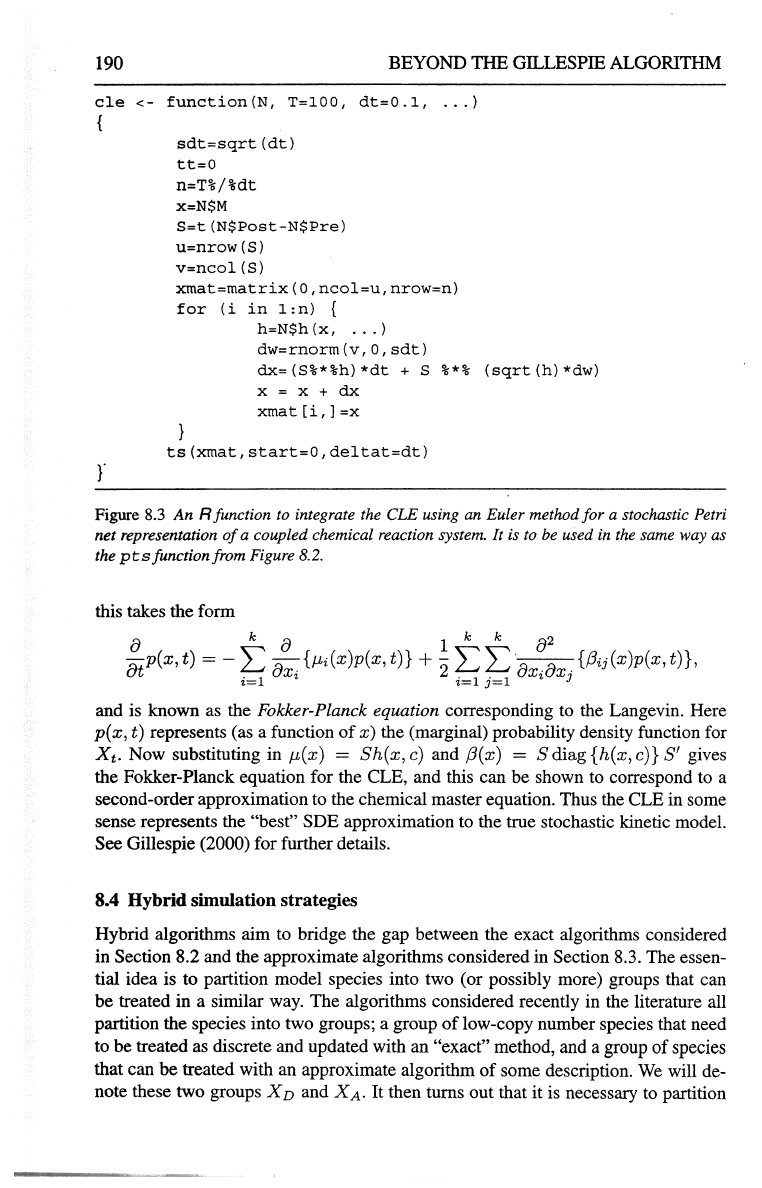
An R function
to
integrate the
CLE
using the
Euler method is given in Figure 8.3. Again, this method can work extremely well
if
there are more than (say) ten molecules
of
each reacting species throughout the
course
of
the simulation. However,
if
the model contains species with a very small
number
of
molecules, simulation based
on
a pure Langevin approximation is likely
to
be
unsatisfactory. Again, however, a hybrid algorithm can
be
constructed that uses
discrete updating for the low copy-number species and a Langevin approximation for
the rest; such an algorithm will
be
discussed in Section 8.4.3.
Having used a relatively informal method to derive the CLE, it is worth taking
time to understand more precisely its relationship with the true discrete stochastic
kinetic model (represented by a Markov
jump
process).
In
Section 6. 7 we derived the
chemical Master equation as Kolmogorov's forward equation for the Markov
jump
process.
It
is possible to develop a corresponding forward-equation for the chemical
Langevin equation (8.3).
For
a general k-dimensional Langevin equation
dXt
= J.L(Xt)dt +
j3
1
1
2
(Xt)dWt.
t
Note
that
setting
the
tenn
in
dWi
to
zero
gives
the
ODE
system
corresponding
to the
continuous
detenninistic
approximation.
+
Here,
for
a p x p
matrix
M
(typically
symmetric),
.,fM
(or
M
1
1
2
)
denotes
any p x p
matrix
N
satisfying
N
N'
=
M.
Common
choices
for
N include
the
symmetric
square
root
matrix
and
the
Cholesky
factor;
see
Golub
&
Van
Loan
(1996)
for
computational
details.
)
190
BEYOND
THE GILLESPIE
ALGORITHM
cle
<-
function(N,
T=lOO,
dt=O.l,
...
)
r
sdt=sqrt(dt)
tt=O
n=T%/%dt
X=N$M
S=t(N$Post-N$Pre)
u=nrow(S)
v=ncol(S)
xmat=matrix(O,ncol=u,nrow=nl
for
(i
in
l:n)
{
h=N$h(x,
...
)
dw=rnorm(v,O,sdt)
dx=(S%*%h)*dt
+ S
%*%
(sqrt(h)*dw)
X=X+dx
xmat[i,]=x
ts(xmat,start=O,deltat=dt)
Figure 8.3
An
R function to integrate
the
Cl.E using an Euler method for a stochastic Petri
net representation
of
a coupled chemical reaction system. It is
to
be
used
in
the
same way as
the
ptsfunctionfrom
Figure 8.2.
this takes the form
f)
kf}
lkk
fj2
fJtp(x, t)
=-
L
~{P,i(x)p(x,
t)} +
2
L L
~{(Jij(x)p(x,
t)},
i=l
X,
i=l
j=l
X,
XJ
and is known as the Fokker-Planck equation corresponding to the Langevin. Here
p(x,
t)
represents (as a function
of
x)
the (marginal) probability density function for
Xt.
Now substituting in p,(x) =
Sh(x,c)
and (J(x) =
Sdiag{h(x,c)}S'
gives
the Fokker-Planck equation for the CLE, and this can be shown to correspond to a
second-order approximation to the chemical master equation. Thus the CLE in some
sense represents the
"best" SDE approximation to the true stochastic kinetic model.
See Gillespie (2000) for further details.
8.4 Hybrid simulation strategies
Hybrid algorithms aim to bridge the gap between the exact algorithms considered
in Section 8.2 and the approximate algorithms considered in Section 8.3. The essen-
tial idea is to partition model species into two (or possibly more) groups that can
be
treated in a similar way. The algorithms considered recently in the literature all
partition the species into two groups; a group
of
low-copy number species that need
to
be
treated as discrete and updated with an "exact" method, and a group of species
that can
be
treated with an approximate algorithm
of
some description.
We
will de-
note these two groups
Xv
and XA. It then turns out that it is necessary
to
partition
192
BEYOND
THE
GILLESPIE ALGORITHM
7.
If
a
discrete
reaction
has
occurred,
find
the
time,
t
1
and
type
of
the
(first)
reaction.
Then
putt
: = t
1
,
update the continuous values to those appropriate for time t
1
,
and update the discrete variables according the reaction type that has occurred.
8.
H t <
Tmax•
return to step 2.
The algorithm has been presented assuming that Gillespie's direct method will
be used for the discrete updating, but is easily adapted to other discrete updating
schemes, such as the next reaction method. There are a number
of
techniques that
could be used for determining an appropriate value
of
.D.t.
In Kiehl
et
al. (2004)
it is assumed that an appropriate timestep for the ODE solver can be determined
a priori as
Jt. Then an appropriate "discrete step size" or can be chosen, possibly
as the expected time until the first discrete reaction, giving
Jt
=
1/ho(x,
c). Then
.D.t
=min{
ot, or}. In my opinion, it is likely to
be
beneficial to make or a bit smaller
than the expected time until the first discrete reaction, in order to reduce the number
of
time intervals containing a discrete event.
This algorithm is fairly straightforward to understand and implement and has a
similar structure to the other hybrid
algorithms· we will consider.
It
therefore pro-
vides a useful starting point for thinking about hybrid
sin:mlation strategies. The main
problem with the algorithm is that the
ODE approximation is too crude in the context
of
stochastic modelling
of
genetic and biochemical networks. As Kiehl
et
al. (2004)
fully acknowledge, the algorithm has the effect
of
suppressing the intrinsic variation
of
variables assigned to the continuous regime, and this can have important conse-
quences when the study
of
stochastic dynamics is
of
direct interest. This therefore
motivates the study
of
hybrid algorithms that better preserve the stochastic variation
of
the system dynamics.
8.4.2 Maximal timestep algorithm
The maximal timestep method is a hybrid algorithm proposed by Puchalka & Kierzek
(2004) that combines an exact updating procedure for the low concentration species
with a r-leaping approximate updating algorithm for the other species.
Puchalka
& Kierzek (2004) chose to use the next reaction method for the exact updating,
but it would
be
straightforward to reformulate the algorithm using Gillespie's di-
rect method. A greatly simplified version
of
the full algorithm could be described as
follows:
1.
Initialise the system and set t : =
0.
2. Calculate the fast reaction hazards and use tilese to select an appropriate r (for tile
r-leap
updating scheme).
3.
Assuming a constant hazard for the slow reactions, decide
if
a slow reaction has
taken place in
[t,
t +
r].
4.
If
no slow reaction has taken place, perform a
r-leap
update on the fast reactions
tot:=
t +
r.
5.
If
a slow reaction has taken place, identify tile time, t
1
,
and type of tile (first)
reaction. Then
putt:=
t
1
,
perform a
r-leap
update
of
the fast reactions to t
1
,
and
update the slow variables according to the slow reaction that has occurred.