Weinan E. Principles of Multiscale Modeling
Подождите немного. Документ загружается.

2.1. MATCHED ASYMPTOTICS 37
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−5
−4
−3
−2
−1
0
1
2
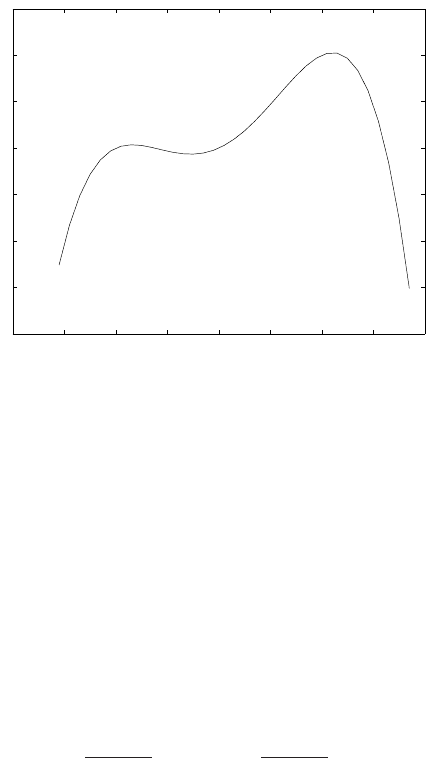
Figure 2.2: Inverted double well potential that illustrates the solution of (2.1.45).
Numerous numerical results confirm that this is indeed the case. Basically, the solution
u
ε
is very close to u
1
and u
2
except in thin layers in which transition b etween u
1
and u
2
takes place. To understand the dynamics of u
ε
, we only have to understand the dynamics
of these layers. In particular, our outer solution is simply: U = u
1
, u
2
.
To understand the dynamics of these layers, we assume that they occupy a thin region
around a curve whose configuration at time t is denoted by Γ
t
. Let ϕ(x, t) = dist(x, Γ
t
),
the distance between x and Γ
t
. We make the ansatz that
u
ε
∼ U
0
ϕ(x, t)
ε
+ εU
1
ϕ(x, t)
ε
, x, t
+ ··· (2.1.43)
Substituting this ansatz into (2.1.42) and balancing the leading order terms in powers of
ε, we get
∂
t
ϕU
′
0
(y) = U
′′
0
(y) − V
′
(U
0
(y)) (2.1.44)
with the boundary condition: lim
y→±∞
U(y) = u
1
, u
2
. This is a nonlinear eigenvalue
problem, with λ = ∂
t
ϕ as the eigenvalue. Let us write (2.1.44) as
λU
′
0
(y) = U
′′
0
(y) − V
′
(U
0
(y)) (2.1.45)
If we neglect the term on the left hand side of (2.1.44), we obtain Newton’s equation for
an inertial particle in the inverted potential −V (see Figure 2.1.4). Assume that u
2
< u
1
.
Imagine that a particle comes down from u
1
at y = −∞. Without friction it will pass

38 CHAPTER 2. ANALYTICAL METHODS
through u
2
at some point and go further down. This is prevented by the the presence
of the term λU
′
0
which is a friction term. The value of λ gives the just right amount of
friction so that the particle reaches u
2
as y → +∞.
Multiplying (2.1.44) by U
′
0
on both sides and integrating, we obtain
∂
t
ϕ
Z
∞
−∞
(U
′
0
(y))
2
dy = V (u
1
) − V (u
2
) (2.1.46)
Since ∂
t
ϕ = ∂
t
ϕ/|∇ϕ| = v
n
, the normal velocity of Γ
t
, we obtain:
v
n
=
V (u
1
) − V (u
2
)
R
∞
−∞
(U
′
0
(y))
2
dy
(2.1.47)
At this time scale (which is sometimes called the convective time scale, in contrast to
the diffusive time scale discussed below), the interface moves to the region of lower free
energy, with a constant normal velocity that depends on the difference in the free energy
of the two phases u
1
and u
2
.
Next we consider the case when V (u
1
) = V (u
2
). To be specific, we will take V (u) =
1
4
(1 − u
2
)
2
. In this case, at the convective time scale, we have v
n
= 0, i.e. the interface
does not move. In order to see interesting dynamics for the interface, we should consider
longer time scale, namely, the diffusive time scale, i.e. we rescale the problem by replacing
t by tε and obtain
∂
t
u
ε
= ∆u
ε
+
1
ε
2
u
ε
(1 − (u
ε
)
2
) (2.1.48)
We make the same ansatz as in (2.1.43). The leading order and the next order equations
(in powers of ε) now become
U
′′
0
(y) + (1 − U
2
0
)U
0
= 0 (2.1.49)
∂
t
ϕU
′
0
= U
′′
1
|∇ϕ|
2
+ U
′
0
∆ϕ + U
1
(1 − 3U
2
0
) (2.1.50)
The solution to (2.1.49) with the boundary condition lim
ϕ→±∞
U(y) = ±1 is given by
U(y) = tanh
y
√
2
(2.1.51)
Since |∇ϕ| = 1, (2.1.50) gives
∂
t
ϕU
′
0
= U
′′
1
+ U
′
0
∆ϕ + U
1
(1 − 3U
2
0
) (2.1.52)

2.2. THE WKB METHOD 39
Multiplying both sides by U
′
0
and integrating in y, we obtain (note that
R
∞
−∞
U
′
0
{U
′′
1
+
U
1
(1 − 3U
2
0
)}dy = 0)
∂
t
ϕ = ∆ϕ (2.1.53)
This can also be written as
∂
t
ϕ
|∇ϕ|
= ∇ ·
∇ϕ
|∇ϕ|
(2.1.54)
In terms of Γ
t
, this is the same as
v
n
= κ (2.1.55)
where κ is the mean curvature of Γ
t
.
Examples of this type are discussed in [?].
2.2 The WKB method
To motivate the WKB metho d , let us look at the ODE
ε
2
d
2
u
ε
dx
2
− u
ε
= 0, (2.2.1)
with boundary condition u
ε
(0) = 0 and u
ε
(1) = 1. It is straightforward to find the exact
solution to this problem:
u
ε
= Ae
x/ε
+ Be
−x/ε
, (2.2.2)
where A and B are constants determined by the boundary conditions: A = e
1/ε
/(e
2/ε
−1)
and B = −e
1/ε
/(e
2/ε
−1). One thing we learn from this explicit solution is that it contains
factors with 1/ε in the exponent. Power series expansion in ε will not be able to capture
these terms.
Now consider the problem
ε
2
d
2
u
ε
dx
2
− V (x)u
ε
= 0 (2.2.3)
We assume that V (x) > 0 (the case where V changes sign, known as the turning point
problem, is more difficult to deal with, see [?]). This equation can no longer be solved
explicitly. However, motivated by the form of the explicit solution to (2.2.1) , we will look
for approximate solutions of the form
u
ε
(x) ∼ e
1
ε
(S
0
(x)+εS
1
(x)+O(ε
2
))
(2.2.4)
40 CHAPTER 2. ANALYTICAL METHODS
Since
d
2
u
ε
dx
2
∼ (
1
ε
S
′′
0
+ S
′′
1
)e
1
ε
S
0
+S
1
+ (
1
ε
S
′
0
+ S
′
1
)
2
e
1
ε
S
0
+S
1
+ O(1) (2.2.5)
we have
(εS
′′
0
+ ε
2
S
′′
1
) + (S
′
0
+ εS
′
1
)
2
− V (x) = O(ε
2
). (2.2.6)
The solution to the leading order equation
(S
′
0
(x))
2
− V (x) = 0 (2.2.7)
is given by
S
0
= ±
Z
x
p
V (y) dy. (2.2.8)
The next order equation
S
′′
0
+ 2S
′
0
S
′
1
= 0 (2.2.9)
gives
S
1
= −
1
2
log |S
′
0
| = −
1
4
log(V ). (2.2.10)
Therefore, to O(ε), the solution must be a linear combination of the two obtained above
u(x) ∼ A
1
V (x)
−1/4
e
1
ε
R
x
√
V (y) dy
+ A
2
V (x)
−1/4
e
−
1
ε
R
x
√
V (y) dy
. (2.2.11)
where A
1
and A
2
are constants depending on the boundary condition and the starting
point of the integral in the exponent of (2.2.11).
As another example, consider the Schr¨odinger equation
iε∂
t
u
ε
= −
1
2
ε
2
∆u
ε
+ V (x)u
ε
, (2.2.12)
with initial condition:
u
ε
(x, 0) = A(x)e
iS(x)/ε
. (2.2.13)
We will look for approximate solutions in the form:
u
ε
(x, t) ∼ A
ε
(x, t)e
iS(x,t)/ε
, (2.2.14)
where A
ε
(x, t) ∼ A
0
(x, t) + εA
1
(x, t) + ···. Substituting into (2.2.12), we obtain the
leading and next order equations
∂
t
S +
1
2
|∇S|
2
+ V (x) = 0, (2.2.15)
∂
t
A
0
+ ∇S ·∇A
0
+
1
2
A
0
∆S = 0. (2.2.16)

2.3. AVERAGING METHODS 41
The first question above is the Eikonal equation, which happen to be the usual Hamilton-
Jacobi equation in classical mechanics:
∂
t
S + H(x, ∇S) = 0, (2.2.17)
where H(x, p) = |p|
2
/2+V (x). The second equation is a transport equation for the lead-
ing order behavior of the amplitude function A
0
. This establishes a connection between
quantum and classical mechanics via the semi-classical limit ε → 0.
This asymptotic analysis is valid as long as the solution to the Eikonal equation
remains smooth. However, singularities may form in the solutions of th e Eikonal equation,
as is the case of caust ics, and the asymptotic analysis has to be modified to deal with
such a situation [?].
2.3 Averaging methods
In many problems, the variables t hat describe the state of the system can be split
into a set of slow variables and a set of fast variables, and we are more interested in the
behavior of the slow variables. In situations like this, one can often obtain an effective
model for the slow variables by properly averaging the original model over the statistics
of the fast variables. We discuss such averaging met hods in this section.
2.3.1 Oscillatory problems
Consider the following example:
dx
ε
dt
= −
1
ε
y
ε
+ x
ε
(2.3.1)
dy
ε
dt
=
1
ε
x
ε
+ y
ε
(2.3.2)
From now on, for simplicity, we will sometimes neglect the superscript ε. If we replace
(x, y) by the polar coordinates (r, ϕ), we get
dϕ
dt
=
1
ε
(2.3.3)
dr
dt
= r (2.3.4)

42 CHAPTER 2. ANALYTICAL METHODS
When ε ≪ 1, the dynamics of the angle variable ϕ is much faster than that of the variable
r.
In general, we may use the action-angle variables and consider systems of the form:
dϕ
dt
=
1
ε
ω(I) + f(ϕ, I) (2.3.5)
dI
dt
= g(ϕ, I) (2.3.6)
Here f and g are assumed to be periodic with respect to the angle variable ϕ with period
[−π, π]. We also assume that ω does not vanish. In this example ϕ is the fast variable
and I is the slow variable. Our objective is to derive simplified effective equations for the
slow variable. For this purpose, we will make use of the multiscale expansion, which is a
very powerful technique that will be discussed in more detail in the next section.
We will look for approximate solutions of (2.3.1) and (2.3.2) in the form:
ϕ(t) ∼ ϕ
0
t
ε
+ εϕ
1
t
ε
, t
(2.3.7)
I(t) ∼ I
0
(t) + εI
1
t
ε
, t
(2.3.8)
This says that ϕ and I are in principle functions with two scales, but to leading order I
is a function of only the slow scale. Let τ = t/ε. To guarantee that the terms ϕ
0
and I
0
in the above ansatz are indeed the leading order terms, we will assume that ϕ
1
(τ, t) and
I
1
(τ, t) grow sublinearly in τ:
ϕ
1
(τ, t)
τ
→ 0,
I
1
(τ, t)
τ
→ 0 (2.3.9)
as τ → ∞. Substituting the ansatz into (2.3.5), we obtain the following leading order
equations:
1
ε
dϕ
0
dτ
t
ε
− ω(I
0
(t))
+ O(1) = 0 (2.3.10)
dI
0
dt
(t) +
∂I
1
∂τ
t
ε
, t
− g
ϕ
0
t
ε
, I
0
(t)
+ O(ε) = 0 (2.3.11)
Our objective is to find ϕ
0
, I
0
, ϕ
1
, I
1
, ··· su ch that the equations above are satisfied to as
2.3. AVERAGING METHODS 43
high an order in ε as possible. The leading order equations are:
dϕ
0
dτ
t
ε
= ω(I
0
(t)) (2.3.12)
dI
0
dt
(t) +
∂I
1
∂τ
t
ε
, t
= g
ϕ
0
t
ε
, I
0
(t)
(2.3.13)
To guarantee that these equations hold, we require:
dϕ
0
dτ
(τ) = ω(I
0
(t)) (2.3.14)
dI
0
dt
(t) +
∂I
1
∂τ
(τ, t) = g(ϕ
0
(τ), I
0
(t)) (2.3.15)
for all values of t and τ , even though the original problem only requires them to hold
when τ = t/ε.
The solution to the first equation is given by:
ϕ
0
(τ) = ω(I
0
)τ + ˆϕ
0
(2.3.16)
Averaging the second equation in τ over a large interval [0, τ], and letting τ → ∞, we
obtain, using the sublinear growth condition:
dI
0
dt
= lim
τ→∞
1
τ
Z
τ
0
g(ϕ
0
(τ
′
), I
0
)dτ
′
=
1
2π
Z
[−π,π]
g(θ, I
0
)dθ (2.3.17)
This gives rise to the averaged system:
dJ
dt
= G(J), G(J) =
1
2π
Z
[−π,π]
g(θ, J)dθ (2.3.18)
It is a simple matter to show that for any fixed time T , there exists a constant C such
that
|I(t) − J(t)| ≤ Cε
for 0 ≤ t ≤ T [?]. Therefore in this case, the dynamics of the slow variable is described
accurately by the averaged system.
The story becomes much more complicated when there are more than one degree of
freedom. Consider
dϕ
dt
=
1
ε
ω(I) + f(ϕ, I) (2.3.19)
dI
dt
= g(ϕ, I) (2.3.20)
44 CHAPTER 2. ANALYTICAL METHODS
where ϕ = (ϕ
1
, ··· , ϕ
d
), I = (I
1
, ··· , I
d
), f = (f
1
, ··· , f
d
) and g = (g
1
, ··· , g
d
). f and
g are periodic functions of ϕ with period [−π, π]
d
. Formally, the “averaging theorem”
states that for small values of ε, the behavior of the action variable is approximately
described by the averaged system:
dJ
dt
= G(J), (2.3.21)
where
G(J) =
1
(2π)
d
Z
[−π,π]
d
g(θ, J)dθ
1
···dθ
d
, θ = (θ
1
, ··· , θ
d
) (2.3.22)
We put “averaging theorem” in quotation marks since this statement is not always valid
due to the occurence of resonance.
To see how (2.3.21) may arise, we again proceed to look for multiscale solutions of
the type (2.3.7) and (2.3.8), this leads us to
dI
0
dt
= lim
τ→∞
1
τ
Z
τ
0
g(ϕ
0
(τ
′
), I
0
)dτ
′
, ϕ
0
(τ) = ω(I
0
)τ + ˆϕ
0
(2.3.23)
Now, to evaluate the right hand side, we must distinguish two different cases:
1. When the components of ω(I
0
) are rationally dependent, i.e. the exists a vector q
with rational components, such that q · ω(I
0
) = 0. This is the resonant case.
2. When the components of ω(I
0
) are rationally independent. In this case, the flow
defined by (2.3.16) is ergodic on [−π, π]
d
(periodically extended).
In the second case, we obtain that
lim
τ→∞
1
τ
Z
τ
0
g(ϕ
0
(τ
′
), I
0
)dτ
′
=
1
(2π)
d
Z
[−π,π]
d
g(ϕ, I
0
)dϕ
1
···dϕ
d
(2.3.24)
This gives us the averaged equation (2.3.21)-(2.3.22).
The averaged equation (2.3.21) neglects the resonant case. The r ationale for doing so
is that there are many more rationally independent vectors than the rationally dependent
ones. Therefore, generically, the system will pass through resonances instead of being
locked in resonances. However, it is easy to see that if the system is indeed locked in a
resonance, then the “averaging theorem” may fail.
2.3. AVERAGING METHODS 45
As an example, consider the case when d = 2, ω(I) = (I
1
, I
2
), f
1
= f
2
= 0, g
1
=
0, g
2
= cos(ϕ
1
− ϕ
2
) (see [?]). In this case, G
1
= G
2
= 0. Let the initial data be given
by:
I
1
(0) = I
2
(0) = 1, ϕ
1
(0) = ϕ
2
(0) = 0
For the original system, we have
I
1
(t) = 1, I
2
(t) = 1 + t.
However the solution of the averaged system with the same initial data is given by:
J
1
(t) = J
2
(t) = 1.
The deviation of I from J comes from the fact that for the original system (2.3.19),
(ϕ
1
(t), ϕ
2
(t)) stays on the diagonal in the (ϕ
1
, ϕ
2
) plane whereas the averaged system
assumes that (ϕ
1
(t), ϕ
2
(t)) is ergodic on the periodic cell [−π, π]
2
in the ϕ plane.
It should b e noted that the violation of the “averaging theorem” does not mean that
there is a flaw in the perturbation analysis. Indeed, it was clear from the perturbation
analysis that there would be a problem when resonance occurs.
A thorough discussion of this topic can be found in the classic book of Arnold [?].
2.3.2 Stochastic ordinary differential equations
First, a remark about notation. We will not follow standard practice in stochastic
analysis and uses X
t
to denote the value of the stochastic process X at time t and ex-
presses stochastic ODEs in terms of stochastic differentials. Instead, we will use standard
notations for functions and derivatives.
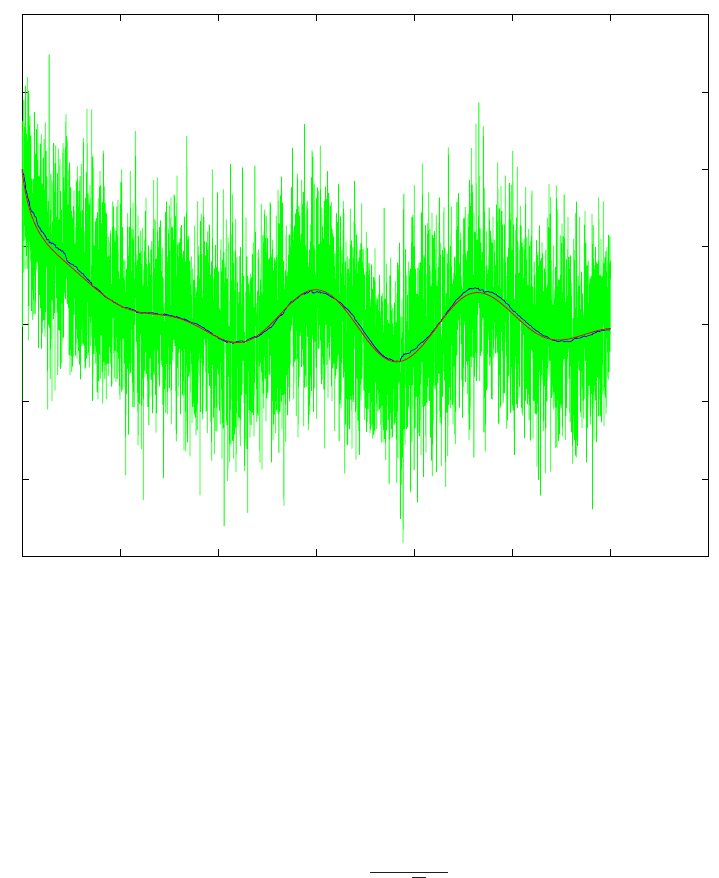
Consider
dX
dt
= f(X, Y, t), X(0) = x (2.3.25)
dY
dt
= −
1
ε
(Y − X) +
1
√
ε
˙
W , Y (0) = y. (2.3.26)
Here X is the slow variable and Y is the fast variable,
˙
W is the standard Gaussian white
noise. An example of the solution to this problem is shown in Figure 2.3 for the case
when f(x, y, t) = −y
3
+ sin(πt) + cos(
√
2πt).
46 CHAPTER 2. ANALYTICAL METHODS
0 1 2 3 4 5 6 7
−3
−2
−1
0
1
2
3
4
Figure 2.3: The solution of (2.3.25) with x = 2, y = 1, ε = 10
3
, X(·) and Y (·) are shown
in blue and green respectively. Also shown in red is the solution of the limiting equation
(2.3.29) (courtesy of Eric Vanden-Eijnden).
The equation for Y at fixed X(t) = x defines an Ornstein-Uhlenbeck process whose
equilibrium density is
ρ
∗
(y; x) =
e
−(y−x)
2
√
π
. (2.3.27)
Intuitively, it is quite clear that when ε is small, the X variable in the second equation
does not change very much before Y reaches local equilibrium (set by the local value of
X) in a time scale of O(ε). This means that the dynamics of the fast variable Y is slaved
to that of the slow variable X. Its behavior can be found approximately by holding
the slow variable X fixed (at its instantaneous value) and compute the (conditional)
equilibrium distribution for Y . In addition, the effective dynamics for the slow variable
is obtained by averaging the right hand side of (2.3.25) with respect to the conditional