Wegener I. Complexity Theory. Exploring the Limits of Efficient Algorithms
Подождите немного. Документ загружается.

7.2 Pseudo-polynomial Algorithms and Strong NP-completeness 95
We call an algorithm for a large number problem pseudo-polynomial if for
every polynomial p(n) the algorithm runs in polynomial time on all inputs
in which all numbers are natural numbers with size bounded by p(n). Under
the assumption that
NP = P, a pseudo-polynomial algorithm implies that a
problem is not strongly
NP-complete. From an algorithmic point of view, this
can be expressed as follows:
If
NP = P, then problems that are strongly NP-complete do not even
have pseudo-polynomial algorithms.
From this vantage point, it is worth taking another look at the proof of
Theorem 6.3.1, i.e., at the proof that the special knapsack problem
SubsetSum
is NP-complete. For the reduction of 3-Sat to SubsetSum for instances of 3-Sat
with inputs with m clauses and n variables we formed instances of SubsetSum
with decimal length n+m. These are enormous numbers. A polynomial reduc-
tion that used only numbers with size bounded by some polynomial p(n, m)
would imply that
NP = P since by Theorem 7.2.3, SubsetSum is polynomially
solvable when restricted to small numbers.
BinPacking is NP-complete even when restricted to two bins, but is pseudo-
polynomially solvable using the pseudo-polynomial algorithm for
SubsetSum.
Somewhat more generally it can be shown that bin packing problems with
a fixed number of bins are pseudo-polynomially solvable, and therefore not
strongly
NP-complete unless NP = P. Now we consider the other extreme
case of bin packing. Suppose there are n =3k objects, k bins of size b,and
that the sizes of the objects a
1
,...,a
n
are such that b/4 <a
i
<b/2and
a
1
+ ···+ a
n
= k · b. This means that any two objects fit into a bin, but more
than three never do. Now we must decide if the objects can be packed into
k bins. If so, then each of the k bins contains exactly three objects, so this
problem is called 3-
Partition. In contrast to the bin packing problems with
few bins and many objects per bin, this problem with many bins and at most
three objects per bin is strongly
NP-complete.
Theorem 7.2.4. 3-
Partition is strongly NP-complete.
We will omit the technically involved proof (see Garey and Johnson
(1979)), in which 3-
DM is first reduced to 4-Partition with polynomially
large numbers and then this problem is reduced to 3-
Partition with poly-
nomially large numbers. The problem 4-
Partition is defined analogously to
3-
Partition with b/5 <a
i
<b/3andn =4k. Both polynomial reductions are
interesting since in each case information is coded into numbers, as was the
case in the proof that
3-Sat ≤
p
SubsetSum. The problem 3-Partition plays
an important role as a starting point in proving that many other problems
are strongly
NP-complete. We will demonstrate this using BinPacking and
the scheduling problem
SWI (sequencing with intervals) as examples.
96 7 The Complexity Analysis of Problems
Theorem 7.2.5. BinPacking and SWI are strongly NP-complete.
Proof. The claim for
BinPacking is clear, since 3-Partition is a special case
of
BinPacking. To prove the claim for SWI, we first describe a polynomial
reduction from 3-
Partition to SWI and then discuss the size of the numbers
used in the reduction. An instance of 3-
Partition consists of numbers n =3k,
b,anda
1
,...,a
n
such that b/4 <a
i
<b/2anda
1
+ ···+ a
n
= k · b.Fromthis
we construct an instance of
SWI with n tasks A
1
,...,A
n
which represent the
n objects of the instance of 3-
Partition,andk − 1 forcing tasks F
1
,...,F
k−1
.
The tasks A
i
may be started immediately (r(A
i
) = 0), their duration reflects
the size of the corresponding objects (l(A
i
)=a
i
), and they must be completed
by time d(A
i
)=kb+ k − 1. The forcing tasks are defined by r(F
i
)=ib+ i− 1,
l(F
i
) = 1, and d(F
i
)=ib + i. The time of their processing is forced, together
they require k − 1 time, and they force the tasks A
1
,...,A
n
to be completed
within k blocks of length b. So there is a packing of the n objects into the
k bins if and only if the n + k − 1 tasks can be completed by one processor
subject to the side conditions.
The largest number that appears in the instance for
SWI is kb + k − 1. If
the numbers in the input for 3-
Partition are bounded by a polynomial p(n),
then b ≤ p(n)andkb + k − 1 ≤ k · (p(n) + 1). So the strong
NP-completeness
of
SWI follows from the strong NP-completeness of 3-Partition.
7.3 An Overview of the NP-completeness Proofs
Considered
In the course of the last four chapters we have encountered many reductions,
most of which have been polynomial reductions that have been used to prove
the
NP-completeness or even the strong NP-completeness of the decision vari-
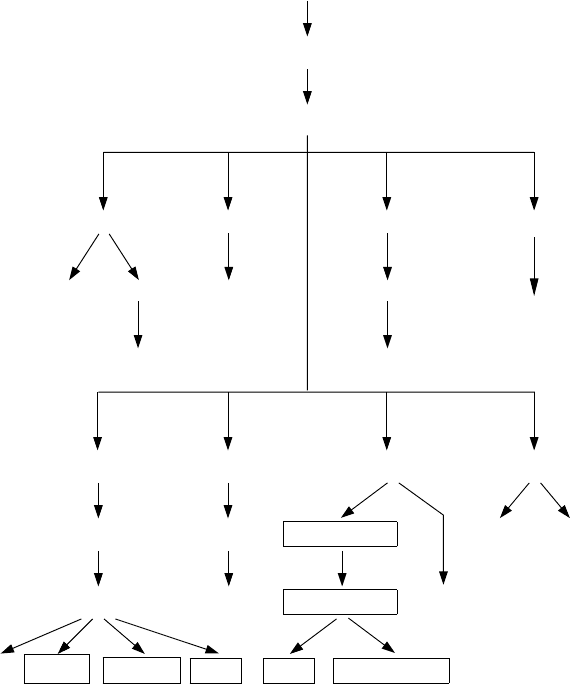
ants of important problems. These results are summarized in Figure 7.3.1.
Here we use
NP(p(n)) to denote all decision problems that can be decided
in nondeterministic time O(p(n)) by an oblivious Turing machine with one
tape. Strongly
NP-complete problems with large numbers are boxed. Poly-
nomial reductions are represented by downward arrows. Next to the arrows
we give the resources required by the reduction: first the computation time
and then the size of the instance constructed by the reduction. For clarity we
have omitted the O(·) in each case. So, for example, our reduction of
3-Sat
to DHC applied to a Boolean formula with n variables in m clauses runs in
time O(n + m) and produces an instance of
DHC with O(n + m) vertices and
O(n+ m) edges. For
Sat, l refers to the length of the input. We have also used
some additional abbreviations:
CP for Championship, VC for VertexCover,
SC for SetCover,andKP for Knapsack.
Figure 7.3.1 shows only a tiny piece of the much larger picture of known
NP-
completeness proofs. This diagram represents only those problems that have
7.3 An Overview of the NP-completeness Proofs Considered 97
n
2
,n
DHP
3-GC
n
2
,n
BMST
3-DM SubsetSum
4-Partition
3-Partition
SWI BinPacking
n, nn, n
DHC
HC
TSP
2,,sym
n
2
,n
TSP
TSP
sym
TSP
k-Sat, k ≥ 3
n + m,
3-4-
GC
pl
(n + m, n + m)
3-
GC
pl
k-GC,
k ≥ 3
MAX-k-Sat,
k ≥ 3
TSP
N
l, l
Clique
VC
IndependentSet
l, l
l, l
n + m,
n + m,
n + m, n + m,
n + m,
(n + m)
2
,
n
2
,n + m,
3-
Sat
Sat
NP
(p(n))
(n + m, n + m)(m, m
2
)
m
2
,
n + m
(n + m, n + m)
(n, n + m)
(n + m, n + m)(n + m, n + m) n + m
Partition
(n + m, m)
(n
2
,n
2
)(n, n
2
)
n, nn, n
n + m,
(n, m)
(0,1,3)-
CPn + m,
(n, m)
p(n)
2
,
`
p(n)
2
,p(n)
2
´
(0,1,3)-
CP
3 rounds
n
2
,
(n + m, m)
KP
n + m, n + m,
SC
n, (n, n)
HP
Fig. 7.3.1. An overview of NP-complete and strongly NP-complete problems.
been discussed here. The full picture of what is known about NP-completeness
would be practically impossible to make: it would fill a large book by itself and
we can safely assume that it would require updating nearly every day. Thus
it was rather an understatement when we spoke in Chapter 1 of thousands of
NP-complete problems.
The full picture of
NP-complete and NP-equivalent problems is im-
mense. The
NP = P-problem is a great intellectual challenge with far-
reaching consequences.

8
The Complexity of Approximation Problems –
Classical Results
8.1 Complexity Classes
To this point we have understood optimization as a sharply defined criterion:
Only the computation of a provably optimal solution counts as success, ev-
erything else is a failure. In cases where we can compute exact solutions to
optimization problems, we should do so. But many optimization problems are
NP-equivalent. For these problems, if we could efficiently compute solutions
with values that are guaranteed to be at least close to the optimal value, this
would be a good way out of the (conjectured)
NP = P-dilemma. This is espe-
cially true for problems from real applications where the parameters are based
on estimates, since exact optimization under these conditions is a fiction.
For a decision problem A we will use
Max-A or Min-A to denote the related
optimization problem. We are interested in optimization problems such that
for each instance x there is a non-empty set S(x)ofsolutions and each solution
s ∈ S(x) has a positive value v(x, s) with respect to x. These conditions are
met by the optimization problems we have encountered with the exception
that sometimes solutions have a value of 0, for example an empty set of nodes
for
Clique or VertexCover representing a graph with no edges. In the first
case we can simply remove the empty set from the set of solutions S(x), since
there is always a trivial solution that is better, namely a clique of size 1. In the
second case we can exclude graphs with no edges from consideration without
significantly altering the problem. We insist that v(x, s) > 0sothatwecan
divide by v(x, s).
Our goal is to compute good solutions s ∈ S(x) and their values v(x, s)
in polynomial time. So we will require that for some polynomial p, the length
of every solution s ∈ S(x) and its value v(x, s) be bounded by p(|x|). For
most problems the values of the solutions will be integers; one exception is
the traveling salesperson problem
Min-TSP
d-Euclid
. Finally, we must decide if
we are interested in a solution with as large a value as possible (maximization
problems) or in a solution with as small a value as possible (minimization
problems). The goodness of a solution s ∈ S(x) should measure “how close”
100 8 The Complexity of Approximation Problems – Classical Results
the value of the solution v(x, s) is to the value of an optimal solution v
opt
(x)
for the instance x. This idea is well-motivated, but it also has the problem
that the definition contains the unknown value v
opt
(x). If we could compute
v
opt
(x) efficiently, then the underlying evaluation problem would be solvable
in polynomial time. As we saw in Section 4.2, for most problems this implies
that the optimization problem itself is solvable in polynomial time. So we will
be forced to estimate v
opt
(x).
But first we want to formalize how we will measure the “closeness”
of v(x, s)tov
opt
(x). The most obvious idea is to consider the difference
v
opt
(x)−v(x, s), or its absolute value. But in many cases this is inappropriate.
A difference of 10 between a computed solution and an optimal solution for
Min-BinPacking is awful if 18 bins suffice, but it is respectable when 1800
bins are needed. For
Min-TSP the problem is changed formally, but not sub-
stantially, when we express the distances in meters instead of kilometers. The
same is true if we express the utility of objects in the knapsack problem using
monetary units and switch from dollars to cents. In both cases the differ-
ence v
opt
(x)− v(x, s) would increase by a constant factor. That this difference
should provide a good measure of the goodness of a solution is the exception
rather than the rule. So instead we will use the usual measure of goodness,
namely the ratio of v
opt
(x)tov(x, s). The difficulties discussed above in our
consideration of v
opt
(x) − v(x, s) do not arise. We follow the tradition of us-
ing the quotient v
opt
(x)/v(x, s) for maximization problems and the quotient
v(x, s)/v
opt
(x) for minimization problems. This ensures that we obtain uni-
form values of goodness that always have a value of at least 1. But we have
to accept that better solutions have a smaller goodness than worse solutions.
This definition is always used for minimization problems. For maximization
problems, the quotient v(x, s)/v
opt
(x) can also be found in the literature.
Definition 8.1.1. For optimization problems the approximation ratio r(x, s)
for a solution s for instance x is defined by
• v
opt
(x)/v(x, s) for maximization problems, and
• v(x, s)/v
opt
(x) for minimization problems.
For an optimization algorithm A we expect that for each instance x a
solution s
A
(x) is computed, which will then have an approximation ratio of
r
A
(x):=r(x, s
A
(x)). For ε := ε
A
(x):=r
A
(x) − 1, such a solution is called
ε-optimal. For minimization problems the value of the computed solution is
100 · ε % above the optimal value, and for maximization problem the optimal
valueis100· ε % larger than the value of the computed solution, the value of
which is 100 · (ε/(1 + ε)) % smaller than the optimal value. Just as we do not
consider the computation time t
A
(x) of an algorithm for each input, instead
of r
A
(x) we will investigate the worst-case approximation ratio
r
A
(n):=sup{r
A
(x): |x|≤n} .
8.1 Complexity Classes 101
Sometimes the worst-case approximation ratio is not the best measure. For
example, in Section 8.2 an efficient approximation algorithm A for
BinPacking
is presented for which
v(x, s
A
(x)) ≤
11
9
· v
opt
(x)+4.
Thus
r
A
(x) ≤
11
9
+
4
v
opt
(x)
.
Since v
opt
(x) ≥ 1, it follows that r
A
(n) ≤ 47/9. Since we can efficiently rec-
ognize instances where all the objects fit into a single bin, we only need the
estimate for the case that v
opt
(x) ≥ 2, which leads to r
A
(n) ≤ 29/9. For in-
stances with large values of v
opt
(x), however, this approaches the much better
approximation ratio of 11/9. Therefore we use the notation r
∞
A
(asymptotic
worst-case approximation ratio) to denote the smallest number b such that
for every ε>0 there is a value v(ε) such that for all x with v
opt
(x) ≥ v(ε)
the relation r
A
(x) ≤ b + ε holds. We will see that (under the assumption that
NP = P) there are problems for which the smallest asymptotic worst-case ap-
proximation ratio achievable in polynomial time is smaller than the smallest
worst-case approximation ratio achievable in polynomial time.
An approximation problem is an optimization problem for which we do not
necessarily demand the computation of an optimal solution but are satisfied to
achieve a prescribed (perhaps asymptotic) approximation ratio in polynomial
time. This raises the question of determining the complexity of approximation
algorithms. We can also ask at what point (for what approximation ratio) the
complexity switches from “
NP-equivalent” to “polynomially solvable”. When
we considered optimization problems, we were able to restrict our attention
to the treatment of their decision problem variants. Approximation problems
have reasonable variants as evaluation problems: In the case of maximization
problems, we can require that a bound b be computed so that the value of the
optimal solution lies in the interval [b, b · (1 + ε)]; for minimization problems
the optimal value should be in the interval [b/(1+ε),b]. There is not, however,
any meaningful decision variant for an approximation problem. For inputs x
with v(x, s) ≤ b for all s ∈ S(x), the question of whether the value of an
optimal solution to a maximization problem lies in the interval [b, b · (1 + ε)]
requires a statement about the value of an optimal solution.
Our definitions allow trivial solutions. For example, for
Clique an algo-
rithm can always output a single vertex as a clique of size 1. The result is an
approximation ratio of at most n. If instead we consider all sets of vertices of
size at most k, checking them in polynomial time to see which ones form a
clique, and outputting the largest clique found, we are guaranteed an approx-
imation ratio of n/k. Approximation ratios become interesting when they are
not “trivially obtainable”.
102 8 The Complexity of Approximation Problems – Classical Results
Definition 8.1.2. Let r : N → [1, ∞) with r(n +1)≥ r(n) be given.
• The complexity class
APX(r(n)) contains all approximation problems which
can be solved by a polynomial-time algorithm A with a worst-case approx-
imation ratio of r
A
(n) ≤ r(n).
• We let
APX denote the union of all APX(c) for c ≥ 1.
• We let
APX
∗
denote the intersection of all APX(c) for c>1.
APX is the class of all approximation problems that can be solved in poly-
nomial time with some constant maximal approximation ratio. The definition
of
APX
∗
requires an APX(c) algorithm for each c>1. This does not, however,
imply the existence of an algorithm which given an ε>0 computes an ε-
optimal solution. Such an algorithm would have the advantage that its users
could choose for themselves the approximation ratio they desired.
Definition 8.1.3. A polynomial-time approximation scheme (abbreviated
PTAS) for an approximation problem is an algorithm A that takes an in-
put of the form (x, ε), where x is an instance of the approximation problem
and ε>0 is a rational number, and for a fixed ε produces in polynomial time
(with respect to the length of x) a solution with worst-case approximation ratio
at most 1+ε. The complexity class
PTAS contains all optimization problems
for which there is a polynomial-time approximation scheme.
Even with a PTAS we have not satisfied all our wishes. Runtimes of
Θ(n
1/ε
)orΘ(n · 2
1/ε
) are allowed, since for a constant ε these are poly-
nomially bounded. But for small values of ε, these runtimes are not tolerable,
in contrast to runtimes of, for example, Θ(n/ε).
Definition 8.1.4. A fully polynomial-time approximation scheme (abbrevi-
ated FPTAS) is a PTAS for which the runtime is polynomially bounded with
respect to the length of x and the value of 1/ε. The complexity class
FPTAS
contains all optimization problems for which there is a fully polynomial-time
approximation scheme.
If we restrict
P to optimization problems, then
P ⊆ FPTAS ⊆ PTAS ⊆ APX .
For optimization problems which presumably do not belong to
P,wearein-
terested in determining whether they belong to
FPTAS, PTAS, or at least to
APX. In the case of APX, we are interested in finding as small a c as possible
so that the problem belongs to
APX(c). For still more difficult problems we
are interested in slowly growing functions r so that the problems belong to
APX(r(n)). There is an obvious generalization of these classes from determin-
istic algorithms to randomized algorithms, but this will not be described in
detail here.
8.2 Approximation Algorithms 103
Approximation algorithms that run in polynomial time for difficult op-
timization problems form a relevant alternative for applications. Com-
plexity classes are available to differentiate which approximation ratios
are achievable.
8.2 Approximation Algorithms
In order to get a feel for approximation algorithms a few examples of efficient
approximation algorithms are discussed here, although for many proofs we
will merely give pointers to textbooks on efficient algorithms. In addition, a
number of approximation results will be cited. We will start with approxima-
tion ratios that grow with the size of the instance and then continue with
APX
algorithms, PTAS, and FPTAS.
We begin with two problems for which methods from Chapter 12 suffice
to show that they do not belong to
APX if NP = P.ForMax-Clique an ap-
proximation ratio of O(n/log
2
n) can be obtained (Boppana and Halld´orsson
(1992)). This is only a minor improvement over the trivial approximation ra-
tio of n or εn for arbitrary ε>0. For the covering problem
Min-SetCover
it is also trivial to obtain an approximation ratio of εn. Here, however, it
was possible to achieve in polynomial time an approximation ratio of O(log n)
(Johnson (1974)).
We will now present
APX algorithms for a few problems. How good their
approximation ratios are will be discussed in Section 8.3 and in Chapter 12.
Our first example is
Min-VertexCover. We will use a simple “pebbling al-
gorithm” in which we imagine placing pebbles on the vertices of the graph as
the algorithm proceeds. At the start of the algorithm, none of the vertices
are pebbled. In linear time we can traverse the list of edges and select an edge
if both of its vertices are still unpebbled. These two vertices are then pebbled.
The algorithm continues until there are no more edges that can be selected;
the output consists of the set of pebbled vertices. If the pebbled vertices did
not cover the edge {v, w}, then this edge could have been selected, so the peb-
bled vertices form a vertex cover of the edges. If k edges are selected, then the
vertex cover contains 2k vertices. The k edges have no vertices in common, so
at least k vertices are needed just to cover those edges. So we have obtained
an approximation ratio of 2.
The following interesting algorithm for
Max-3-Sat achieves an approxi-
mation ratio of 8/7 if all the clauses have exactly three different literals. For
each clause c
i
there are 8 possible assignments for its three variables, and
seven of these satisfy the clause. Let X
i
be the random variable that takes
on the value 1 if a random variable assignment satisfies the clause c
i
and 0
otherwise. By Remark A.2.3, E(X
i
)=Prob(X
i
=1)=7/8; and by Theo-
rem A.2.4 for m clauses if we let X := X
1
+ ··· + X
m
,thenwehavethe
equation E(X)=(7/8) · m. So on average, (7/8) · m clauses are satisfied, but
never more than m. So a random variable assignment has an approximation

104 8 The Complexity of Approximation Problems – Classical Results
ratio of at most 8/7. Now we will derandomize this algorithm. For this we
investigate the two possible values of the Boolean variable x
n
, i.e., x
n
=0or
x
n
= 1. It is simple to compute E(X | x
n
= b)forb ∈{0, 1} as a sum of all
a
i
:= E(X
i
| x
n
= b). Thus a
i
= 1 if the clause is satisfied by x
n
= b, a
i
=7/8
if the clause still has three unassigned variables, a
i
=3/4 if the clause still has
two unassigned variables and the third literal has the value 0. In the course
of this procedure there will be clauses with one unassigned variable and two
literals with the value 0. Then the respective conditional expected value is
1/2. Finally, the conditional expected value of X
i
is 0 if all three literals have
already been assigned “false”. By Theorem A.2.9 we have
E(X)=
1
2
· E(X | x
n
=0)+
1
2
· E(X | x
n
=1),
and there is a value b
n
∈{0, 1} such that
E(X | x
n
= b
n
) ≥ (7/8) · m.
Since we have computed both conditional expected values, we can choose b
n
suitably. Now we continue analogously for the two possible values of x
n−1
.In
the end we will have found b
1
,...,b
n
∈{0, 1} with E(X | x
1
= b
1
,...,x
n
=
b
n
) ≥ (7/8) · m. This condition fixes the values of all the variables, and X
is the number of clauses satisfied in this way. The runtime is O(nm), since
for each variable x
i
we consider the clauses that result from setting x
i+1
=
b
i+1
,...,x
n
= b
n
.
For
Min-BinPacking it is very simple to obtain an approximation ratio of
2. We pack each object in order into a bin, using a new bin only if it does
notfitintoanyofthebinsalreadyused.Ifalltheobjectsfitintoonebin,we
obtain the optimal solution. Otherwise, let b
∗
be the size of the contents of the
least packed bin. If b
∗
≤ b/2, then by our strategy all the other bins are filled
with contents at least b − b
∗
. So on average, the bins are always filled at least
half-way, thus it is impossible to halve the number of bins used. A somewhat
more complicated algorithm achieves in polynomial time an approximation
ratio of 3/2. Here we notice that the larger objects cause special problems.
That leads to the following idea. First the objects are sorted by size, and the
larger objects are packed first. Each object is packed into the bin with the
smallest amount of free space that can still hold the object. The resulting
strategy is referred to as “best-fit decreasing” (BFD). For this algorithm the
relation
v(x, s
BFD
(x)) ≤
11
9
v
opt
(x)+4
was proved (Johnson (1974)). As was already discussed in Section 8.1, this
leads to an upper bound for the asymptotic worst-case approximation ratio of
11/9. A polynomial algorithm of Karmarkar and Karp (1982) has an approx-
imation ratio bounded by 1 + O((log
2
v
opt
(x))/v
opt
(x)), i.e., an asymptotic
worst-case approximation ratio of 1. This kind of algorithm is also called
8.2 Approximation Algorithms 105
an asymptotic FPTAS. In Section 8.3 and Chapter 12 we will discuss lower
bounds for worst-case approximation ratios of polynomial-time algorithms.
Two results for traveling salesperson problems should be briefly men-
tioned. For
Min-TSP
a worst-case approximation ratio of 3/2 can be guar-
anteed by a polynomial-time algorithm (see Hromkoviˇc (1997)), and for
Min-TSP
d-Euclid
there is even a PTAS (Arora (1997)). For Min-VertexCover
and Max-IndependentSet there is also a PTAS if we require that the graphs
be planar (Korte and Schrader (1981)).
We will demonstrate the construction of a PTAS using as an example a
simple scheduling problem for which even an FPTAS is known. The problem
consists of scheduling n tasks on two processors in such a way that the maximal
load of the processors is minimized. The processors are identical and require
time a
i
for the ith task. The basic idea is that the most important thing is
to schedule the “large tasks” (those for which a
i
is large) well, and that there
cannot be all that many large tasks. Let ε>0 be given and let L := a
1
+···+a
n
be the total time required for the n tasks. A task will be considered large if
it requires time at least εL. Then the number of large tasks is bounded by
the constant 1/ε and there are “only” at most c := 2
1/ε
distributions of
these large tasks between the two processors. For each of these c distributions
the remaining tasks are scheduled “greedily”, that is each task is assigned
to the processor with the lightest load. From among the at most c solutions
that result, the best one is chosen. The required computation time of O(nc)
is linear for a constant ε, but it is not a polynomial in n and 1/ε.Wenow
compare the maximal load in an optimal solution with the maximal load from
the approximation algorithm. The optimal solution also distributes the large
tasks between the two processors, and we consider the attempted solution of
the approximation algorithm that begins by distributing the large tasks in
exactly the same way. If all the smaller tasks can be handled by the processor
with the lesser load after assigning the large tasks without increasing its load
beyond the load of the other processor, then the approximation algorithm
provides an optimal solution. Otherwise, the greedy algorithm ensures that
the load of the two processors differs by at most εL. Thus the larger load is at
most εL/2 larger than the load of both processors if they are equally loaded.
If the loads are equally distributed, the load for each processor is L/2. For an
instance x, v
opt
(x) ≥ L/2andv(x, s) ≤ L/2+εL/2 = (1 + ε)L/2. Thus the
solution is ε-optimal and we have designed a PTAS.
Finally, we want to discuss the ideas for an FPTAS for
Max-Knapsack
(see also Hromkoviˇc (1997)). In the proof of Theorem 7.2.3 we presented a
pseudo-polynomial time algorithm for
Knapsack using the method of dynamic
programming. This algorithm was polynomially time-bounded in the case that
the weights were polynomially bounded. In a similar fashion it is possible to
design a pseudo-polynomial time algorithm that is polynomially time-bounded
for polynomially bounded utility values and arbitrary weights. Now consider
an arbitrary instance x of
Max-Knapsack. We can assume that w
i
≤ W
for each object i. If we alter the utility values, we do not change the set of