Wegener I. Complexity Theory. Exploring the Limits of Efficient Algorithms
Подождите немного. Документ загружается.

84 6 NP-complete and NP-equivalent Problems
T
5
x
1
i
a
3
b
3
a
4
x
4
i
T
7
T
1
x
3
i
x
4
i
x
1
i
a
1
b
1
b
4
a
2
b
2
x
2
i
x
3
i
x
2
i
T
8
T
2
T
3
T
6
T
4
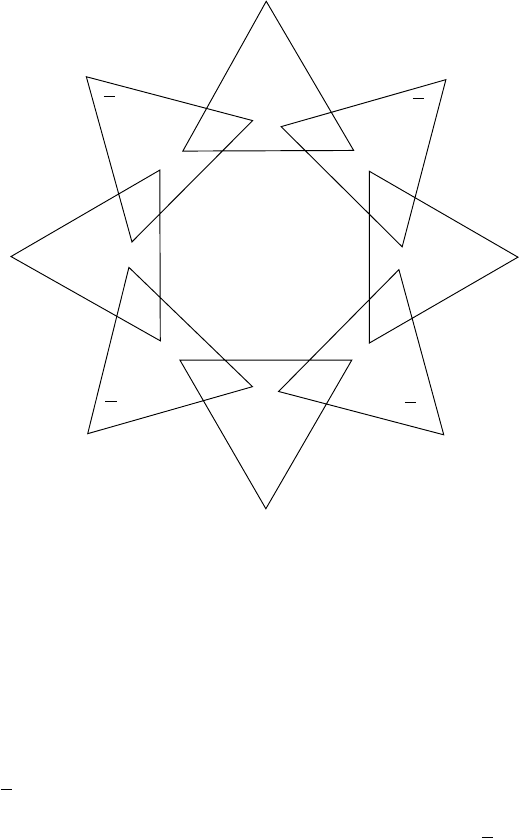
Fig. 6.6.1. A selection component from the reduction 3-Sat ≤
p
3-DM.
with the interpretation that x
i
= 0, or we choose T
2
, T
4
, T
6
,andT
8
with the
interpretation that x
i
= 1. It is also clear from Figure 6.6.1 that this method
would not work if we had only two groups of experts.
For the jth clause c
j
,wehaveapersonp
2
j
in group 2 and a person p
3
j
in group 3. These two people can only be in a team together, and need a
third member from group 1, which is intended to represent the satisfaction
of one of the literals occurring in c
j
. If the literal x
i
occurs in c
j
, then there
is a team (x
l
i
,p
2
j
,p
3
j
). There are enough people for each literal so that each
x
l
i
(or
x
l
i
) only occurs in one team. Finally, there are people q
2
j
and q
3
j
for
1 ≤ j ≤ 2m, designed to form teams with the remaining people of group 1.
These people are very flexible, and all triples (x
l
i
,q
2
j
,q
3
j
)and(
x
l
i
,q
2
j
,q
3
j
) form
potential teams.
Satisfying assignments lead to a formation of teams such that the selection
components do not integrate the people representing the satisfied literals. So
p
2
j
and p
3
j
find a third team member and then teams are formed with q
1
j
and
q
2
j
. On the other hand, any formation of teams on the selection components
can be translated into a variable assignment. If all p
2
j
and p
3
j
belong to teams,
then the variable assignment is satisfying.

6.7 Championship Problems 85
An important generalization of 3-DM is the set cover problem, SetCover,
in which a set S,anumberk and a sequence A
1
,...,A
n
of subsets of S are
given and we must decide whether S is the union of k of the subsets A
i
.
An important application area is the minimization of depth-2 circuits. If we
let S be the set of all people in an instance of 3-
DM, and form a 3-element
subset of S for each potential team, then we obtain a polynomial reduction
3-
DM ≤
p
SetCover.Thatis,
Corollary 6.6.2.
SetCover is NP-complete.
6.7 Championship Problems
We have already seen that the championship problem with the (0, 1, 2)-
partition rule can be solved in polynomial time. With the introduction of the
(0, 1, 3)-partition rule in the mid-1990’s, the complexity theoretic investiga-
tion of this problem became interesting. The complexity of the championship
problem changes dramatically with this new point rule.
Theorem 6.7.1. The championship problem with the (0,1,3)-partition rule is
NP-complete.
Proof. Once again we will use
3-Sat as the starting point for our reduction.
For the championship problem we will use another representation. We let the
selected team win all its games and temporarily let all other games end in
a tie. The other teams will be represented by vertices and labeled with a
number z ∈ Z indicating that after these temporarily assigned outcomes the
team has z more points than the selected team. The games that remain to be
played are represented by edges between the opposing teams. The question
is now whether the temporarily assigned outcomes can be modified in such
a way that all vertices are labeled with non-positive values. At each edge,
the outcome may be changed once. The effect is that one team receives two
additional points, and the other team loses a point, since a 1:1 tie is converted
into a 3:0 victory for one team.
Now let an instance of
3-Sat be given, i.e., clauses c
1
,...,c
m
over variables
x
1
,...,x
n
. We begin with the construction of variable components that are
to reflect the assignment x
i
=0orx
i
= 1. Variables that do not occur will
be ignored. For all other variables x
i
, we form a binary tree in which the
left subtree has as many leaves as there are occurrences of x
i
in c
1
,...,c
m
.
Similarly the right subtree will have as many leaves as there are occurrences
of
x
i
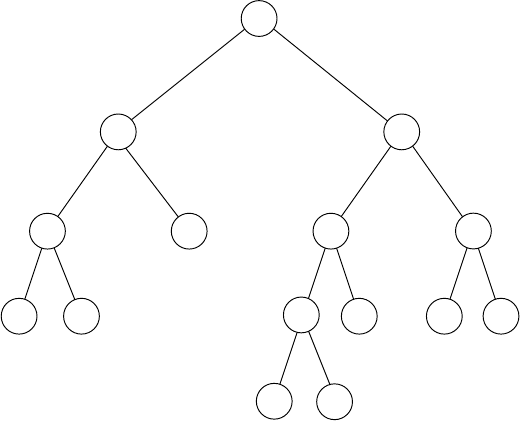
. The root is labeled +1, the leaves are labeled −2, and the other vertices
are labeled 0. Figure 6.7.1 shows an example.
Only the teams at the leaves will play additional games. In order to achieve
a non-positive label, the root team must lose the game to one of its two
children, and we will interpret a loss to the left child as x
i
= 0 and a loss to
the right child as x
i
= 1. If the root loses to its right child, then the child
86 6 NP-complete and NP-equivalent Problems
−2
0
0
0
0
0
+1
−2 −2
−2
−2
−2
−2
−2
0
Fig. 6.7.1. A variable component from the reduction 3-Sat ≤
p
(0, 1, 3) −
Championship. In this example x
i
occurs positively in three clauses and negatively
in five clauses.
receives a value of +2, and must therefore lose to both of its children, ....This
domino effect continues down to the leaves, which obtain the value 0. At this
point, only the leaves in the left subtree (which represents x
i
= 1) can still
gain points. The construction of the clause components and the connections
to the variable components are now obvious. The clause components consist
of a single node (team) labeled +1. This team has three games to play, one
for each of its literals. If the clause contains the literal x
i
, then the team
must play one of the leaves of the x
i
component in the subtree representing
x
i
= 1. Of course, this is done in such a way that each leaf must play exactly
one more game. This completes the construction of an instance of (0, 1, 3)-
Championship.WehaveO(m) teams and O(m) games. The construction can
be carried out in time O(m).
From a satisfying assignment a for all of the clauses, we obtain the fol-
lowing modifications to the temporarily assigned game outcomes which result
in the selected team becoming league champion. The roots of the variable
components start the domino effect that corresponds to their assigned value.
Then, for each clause component there is still one game against a team that
represents a satisfied literal and can therefore receive two additional points.
This game is lost by the team representing the clause. On the other hand,
game outcomes that produce a championship for the selected team must use
at least one of the two subtrees of each variable component in order to reduce
the excess points at the root. We interpret this as the variable assignment.
6.7 Championship Problems 87
The assignment must satisfy all the clauses since otherwise a clause compo-
nent cannot reduce its excess points.
From this example we see that problems that do not belong to the typical
repertoire of combinatoric optimization but come from decisions made by
soccer functionaries can also be handled using the means of complexity theory.
Many very different-looking problems with direct or at least indi-
rect connections to real applications prove to be
NP-complete or NP-
equivalent. The proofs for
NP-completeness use special features of the
problems being considered but otherwise follow a common outline. One
can therefore hope that proofs of
NP-completeness for new problems
can be obtained “almost routinely”. Of the problems we have consid-
ered so far, only the graph isomorphism problem GraphIsomorphism
cannot be assigned one of the two categories “polynomially solvable”
and “
NP-equivalent”.

7
The Complexity Analysis of Problems
7.1 The Dividing Line Between Easy and Hard Versions
of a Problem
We now return to the families of problems introduced in Section 2.2. We will
use these examples to investigate just where the dividing line between easy
and hard problems runs. To do this we will compare similar-looking problems
such as the two covering problems
VertexCover and EdgeCover, and we will
restrict the set of inputs of general problems like
GC in various ways. Claims
that particular problems are efficiently solvable will for the most part be
omitted. Such proofs can be found in textbooks covering efficient algorithms.
We will also omit some of the
NP-completeness proofs.
All the variants of the traveling salesperson problem
TSP that we have
considered are
NP-equivalent. The results of Section 6.2 have interesting im-
plications for two other families of problems. While the problem of computing
a minimum spanning tree can be done efficiently by means of Kruskal’s algo-
rithm, this problem becomes
NP-equivalent if we place a bound on the degrees
of the vertices in the desired spanning tree. Similarly, finding the shortest path
from s to t can be done efficiently using Dijkstra’s algorithm, but finding the
longest cycle-free path from s to t is
NP-equivalent. The hardness of the latter
problems follows from the
NP-completeness of the directed Hamiltonian path
problem
DHP.
SubsetSum and Partition are very specialized knapsack and partitioning
problems that are hard. The hardness of these problems carries over to all
more general variants of these problems. The class of scheduling problems has
an especially rich structure. Various combinations of such parameters as the
number of available processors, the speed of the processors, the suitability
of the processors for specific tasks, the earliest start times for processing the
tasks, the latest completion times, restrictions on the order in which tasks
must be completed, or the option to interrupt tasks lead to an abundance
of problems of differing complexity. Results about scheduling problems can
90 7 The Complexity Analysis of Problems
be found in Lawler, Lenstra, Rinnooy Kan, and Shmoys (1993), and Pinedo
(1995).
We have seen that the team building problem 2-
DM is solvable in polyno-
mial time, but that 3-
DM (and therefore the problems k-DM for all k ≥ 3) is
NP-complete. With the help of an algorithm for 2-DM we can solve the edge
covering problem
EdgeCover, but the vertex covering problem VertexCover
is NP-complete.
Of the satisfiability problems, k-
Sat is NP-complete if k ≥ 3, and Max-k-Sat
is NP-complete for k ≥ 2. For Max-k-Sat we need to decide if at least l
of the m clauses can be simultaneously satisfied, where l is a part of the
input. So k-
Sat is just the special case that l = m, from which it follows
that
Max-k-Sat is NP-complete for k ≥ 3. The proof that Max-2-Sat is also
NP-complete will not be given here, but this result has implications for the
optimization of pseudo-Boolean functions f : {0, 1}
n
→ R. Clauses can be
“arithmetized” as follows: a disjunction of literals z
1
+ z
2
+ ···+z
k
is replaced
by 1 − (1 − z
1
)(1 − z
2
) ···(1 − z
k
)and¯x
i
is replaced by 1 − x
i
.Ifweadd
the “values” of all the resulting clauses we get a pseudo-Boolean polynomial
f : {0, 1}
n
→ R with the properties that f(a) is the number of clauses satisfied
by the assignment a and the degree of f is bounded by the maximum number
of literals occurring in a single clause. From the
NP-completeness of the deci-
sion variant of
Max-2-Sat it follows that the decision variant of the problem
of maximizing a pseudo-Boolean polynomial of degree 2 is also
NP-complete.
Surprisingly, 2-
Sat is solvable in polynomial time. To see this we transform an
instance of 2-
Sat into a directed graph on the vertices x
1
,
x
1
,x
2
, x
2
,...x
n
, x
n
.
Each clause z
1
+ z
2
gives rise to a pair of edges (z
1
,z
2
)and(z
2
,z
1
), which
represent the implications “z
1
=0=⇒ z
2
=1”and“z
2
=0=⇒ z
1
= 1”. All
of the clauses can be simultaneously satisfied if and only if there is no variable
x
i
such that there are paths both from x
i
to
x
i
and also from x
i
to x
i
in the
resulting graph.
Vertex coloring problems have very special hard subproblems. 3-
GC is NP-
complete, and therefore k-
GC is NP-complete for any k ≥ 3. To show that
3-GC ≤
p
k-GC, we add to the given graph k − 3 additional vertices which are
connected to each other and to each vertex in the original graph. These new
vertices will then require k − 3 colors, and none of these colors may be used
for any of the original vertices. A greedy algorithm solves
2-GC in polynomial
time. We take note of two further restrictions:
• k-d-
GC is the restriction of k-GC to graphs with vertex degree at most d.
• k-
GC
pl
is the restriction of k-GC to planar graphs, i.e., to graphs that can
be embedded in the plane without necessitating crossing edges.
The problem k-d-
GC
pl
results from applying both of the above restrictions
at once. Now we get some problems that are trivial in the sense that in their
decision variants all inputs are accepted. This is the case for k-d-
GC when
k>d, since regardless of how the at most d neighbors of a vertex have been
colored, there will always be a color remaining for the vertex itself. Since the
7.1 The Dividing Line Between Easy and Hard 91
famous “Four Coloring Problem” has been solved, we know that every planar
graph is 4-colorable. Therefore, k-
GC
pl
is trivial for k ≥ 4 and, as we have
previously seen, polynomial time decidable for k ≤ 2. In contrast, the very
special problem 3-4-
GC
pl
is NP-complete. This is the problem of deciding if a
planar graph with maximal degree 4 is 3-colorable. This last claim follows by
composing two polynomial reductions each using local replacement showing
that
3-GC ≤
p
3-GC
pl
≤
p
3-4-GC
pl
.
We begin with an instance G of 3-
GC and an embedding of G in the
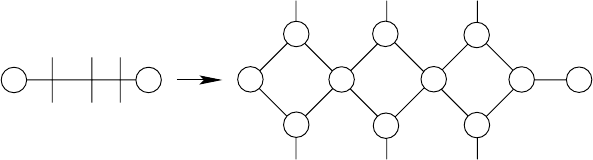
plane with crossings. Figure 7.1.1 indicates how we replace an edge with three
crossings. The subgraph P is the planar graph shown in Figure 7.1.2 with
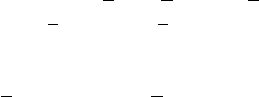
four outer vertices A, B, C,andD. A little experimenting easily shows the
following:
• In every 3-coloring of P , A and C have the same color, and B and D have
the same color.
• Every coloring f of A, B, C,andD with f(A)=f(C)andf(B)=f(D)
can be extended to a 3-coloring of P .
v
PP
u
u
u
v
P
Fig. 7.1.1. Dealing with intersecting edges in 3-GC ≤
p
3-GC
pl
.
This construction guarantees that in Figure 7.1.1 the vertices u and u
receive the same color, so u and v must receive different colors. On the other
hand, every coloring of the nonplanar graph can be translated into a coloring
of the planar graph.
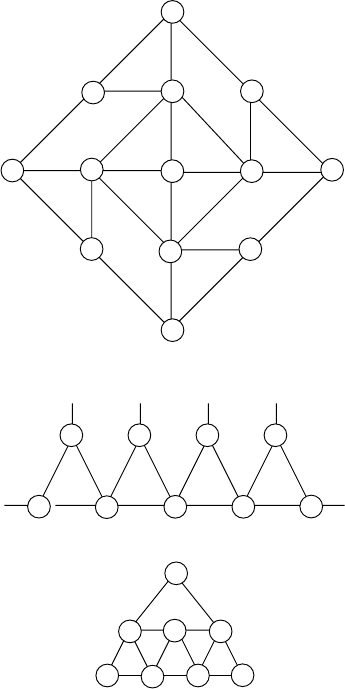
In the next step a vertex v with degree d>4 is replaced with a planar
graph H
d
with d “outer” vertices with degree at most 2, and “inner” vertices
with degree at most 4. In addition, this graph will be 3-colorable if and only
if the outer vertices all have the same color. Then the d edges incident to
v can be distributed among the d outer vertices of the graph representing v
without changing the colorability properties. The construction is described in
Figure 7.1.3 for d = 6. Since the vertices 1, 2, and 3 in H
∗
have degree 2, two
copies of H
∗
can be fused at those vertices without increasing the degree of
any vertex beyond 4.
Finally, we handle the championship problem with n teams. With the a-
point rule, this problem is polynomial-time solvable. On the other hand, with
the (0, 1, 3)-point rule, the problem becomes
NP-complete. This result can be
92 7 The Complexity Analysis of Problems
A
D
B
C
Fig. 7.1.2. The planar graph P .
7
H
6
H
∗
H
∗
H
∗
H
∗
v
2
v
3
v
5
v
1
v
6
1
2
3
4
5
6
8
H
∗
v
4
Fig. 7.1.3. The replacement of a vertex with degree 6 by a planar graph with
maximal degree 4.
generalized to the (0, 1,b)-point rule for any b ∈ Q with b>1andb =2.In
this case, for example, the (0, 1, 3/2)-point rule can be better interpreted as
the (0, 2, 3)-point rule, to which it is equivalent. Actual championship prob-
lems are more specific than the problems we have dealt with so far. Often
leagues are scheduled in rounds in which each team plays exactly one game.
(0, 1, 3)-
Championship is still NP-complete for three remaining rounds, but
polynomial-time solvable for two remaining rounds. It is not clear, however,
if the given standings can actually be achieved in a league where each team
plays each other twice (once at home and once away). In addition, the German
Soccer League (Fußball Bundesliga), for example, uses a prescribed scheduling
scheme that has strong “locality properties”. Under these conditions, (0, 1, 3)-
Championship is polynomial-time solvable for O(log
1/2
n) remaining rounds.
7.2 Pseudo-polynomial Algorithms and Strong NP-completeness 93
Whether this problem is actually polynomial-time solvable for any number of
remaining rounds is an open problem.
For
NP-complete and NP-equivalent problems, it is worth considering
whether one only needs an algorithm for a specialized problem variant,
and if so to investigate the complexity of this specialized problem. We
have used examples to show that the dividing line between easy and
difficult problems can follow a surprising course.
7.2 Pseudo-polynomial Algorithms and Strong
NP-completeness
In Section 7.1 we did not handle an important possibility for restricting prob-
lems, namely to restrict the size of the numbers that occur in the instances.
We consider here only natural numbers. Inputs with bit length n can contain
numbers that are exponentially large with respect to n. On the other hand,
most applications only require numbers of moderate size.
We are interested here in problems in which numbers that are not bounded
by a polynomial in the input length are still meaningful. For the decision vari-
ant of the clique problem we ask about the existence of a clique of size k,where
k is a parameter of the input. In principal, k can be any natural number. But
the only meaningful values of k are in {2,...,n} since all graphs have cliques
of size 1 and no graphs have cliques of size k>n.So
Clique is not of inter-
est in this discussion. The same is true for all variants of the clique problem,
for covering problems, team building problems, and verification problems. On
the other hand, traveling salesperson problems, knapsack problems, partition
problems, network flow problems, championship problems, and number theory
problems of the sort for which the numbers that occur may meaningfully take
on values that are not bounded by a polynomial in the length of the input,
are in principle still meaningful. They are called large number problems.
For difficult problems (e.g.,
NP-equivalent problems) we pose the question:
Are these problems still difficult if the numbers that occur are polynomially
bounded in the length of the input? Number theory problems are a special
case. An instance of
Primes, for example, consists of exactly one number repre-
sented in binary. The value of this number is always exponential in the length
of its binary representation. Thus it is not possible to polynomially restrict the
size of the numbers that occur in instances of
Primes. This situation is differ-
ent for the other problems mentioned above. Because of the great importance
of problems restricted to small numbers, large number problems that remain
difficult when restricted in this way have received a special designation.
Definition 7.2.1. A large number decision problem A is called
NP-complete
in the strong sense (or, more briefly, strongly
NP-complete) if there is a poly-
nomial p(n) such that the problem is
NP-complete when restricted to instances
94 7 The Complexity Analysis of Problems
where all the numbers that occur are elements of N whose values are bounded
by p(n), where n is the length of the instance.
Theorem 7.2.2. The traveling salesperson problem
TSP and the champi-
onship problem
Championship with the (0, 1,a)-point rule are strongly NP-
complete.
Proof. We already know that
TSP is NP-complete even when the distances
are only allowed to take on values from the set {1, 2}. The largest number
that occurs is then n, the name of the last city.
Championship is NP-complete with the (0, 1, 3)-point rule, and so the num-
bers in the instance are bounded by the number of teams, the number of games
that remain to be played, and the current scores. In our reduction of
3-Sat to
(0, 1, 3)-
Championship in the proof of Theorem 6.7.1, no team plays more than
three additional games, so the largest point difference that can be made up
is 9 points. Thus (0, 1, 3)-Championship remains NP-complete when restricted
to small numbers.
Under the assumption that
NP = P, the notion “strong NP-completeness”
can complexity theoretically distinguish among
NP-complete problems.
Theorem 7.2.3. If
NP = P, then Knapsack is not strongly NP-complete.
Proof. The claim will be proved by giving an algorithm for
Knapsack that for
polynomially bounded weight values runs in polynomial time. The algorithm
uses the method of dynamic programming. Consider an instance of
Knapsack
with n objects and weight limit W . We will let KP(k,w)(for1≤ k ≤ n
and 0 ≤ w ≤ W ) denote the modified instance in which only the first k
objects are considered and the weight limit is w.LetU(k, w) be the largest
utility that can be achieved for the instance
KP(k, w), and let D(k, w)bethe
decision for an optimal packing of the knapsack whether we pack object k
(D(k, w) = 1) or do not pack object k (D(k, w) = 0). In addition, we give
reasonable values for extreme values of the parameters: U(k, w)=−∞,if
w<0; and U (0,w)=U(k, 0) = D(k, 0) = 0, if w ≥ 0.
The algorithm now fills out a table row by row with the values
(U(k, g),D(k, g)). If we are considering
KP(k, w), we can pack object k,win-
ning a utility of u
k
, and reduce the weight limit for the remaining objects to
w − w
k
(itispossiblethatw − w
k
< 0). So we must consider the problem
KP(k − 1,w− w
k
). If we decide not to pack object k, then we must consider
KP(k − 1,w). So
U(k, w)=max{U(k − 1,w),U(k − 1,w− w
k
)+u
k
} .
Furthermore, we can set D(k, w)=1ifU(k − 1,w− w
k
)+u
k
≥ U (k − 1,w),
and D(k, g) = 0 otherwise. The computation of (U(k, w),D(k, w)) can be done
in time O(1). The entire runtime amounts to O(n · W ) and is polynomially
bounded if W is polynomially bounded in n.