Вольдек А.И. Электрические машины
Подождите немного. Документ загружается.

Гл. 6J Коммутация
121
бегающем краю щетки уже в начале коммутации, когда этот
край щетки подобно рубильнику замыкает цепь короткозамкну-
той секции, становятся большими. При этом существует некото-
рая тенденция к искрению под набегающим краем щетки.
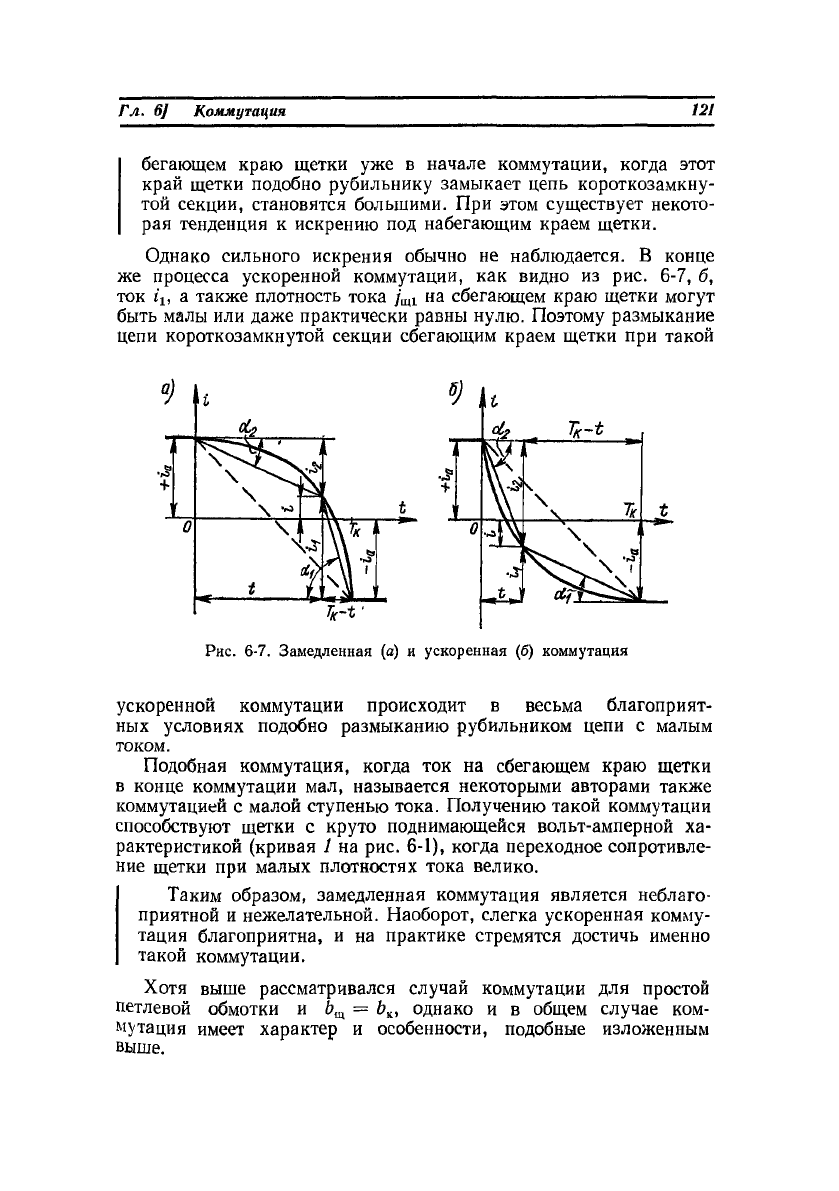
Однако сильного искрения обычно не наблюдается. В конце
же процесса ускоренной коммутации, как видно из рис. 6-7, б,
ток г'х, а также плотность тока /
щ1
на сбегающем краю щетки могут
быть малы или даже практически равны нулю. Поэтому размыкание
цепи короткозамкнутой секции сбегающим краем щетки при такой
ускоренной коммутации происходит в весьма благоприят-
ных условиях подобно размыканию рубильником цепи с малым
током.
Подобная коммутация, когда ток на сбегающем краю щетки
в конце коммутации мал, называется некоторыми авторами также
коммутацией с малой ступенью тока. Получению такой коммутации
способствуют щетки с круто поднимающейся вольт-амперной ха-
рактеристикой (кривая 1 на рис. 6-1), когда переходное сопротивле-
ние щетки при малых плотностях тока велико.
Таким образом, замедленная коммутация является неблаго-
приятной и нежелательной. Наоборот, слегка ускоренная комму-
тация благоприятна, и на практике стремятся достичь именно
такой коммутации.
Хотя выше рассматривался случай коммутации для простой
петлевой обмотки и £>
щ
= Ь
к
, однако и в общем случае ком-
мутация имеет характер и особенности, подобные изложенным
выше.
Гк-f
Рис. 6-7. Замедленная (а) и ускоренная (б) коммутация

§ 6-4. Электродвижущие силы в коммутируемой секции
Электродвижущие силы, индуктируемые в коммутируемой сек-
ции, оказывают на коммутацию весьма существенное влияние
(см. § 6-3).
Э. д. с. самоиндукции. Коммутируемая секция обладает опре-
деленной индуктивностью L
c
, вследствие чего в ней при коммутации
индуктируется э. д. с.
В соответствии с выбранным в § 6-3 правилом знаков ток изме-
няется от значения t = i
a
при t — 0 до t = —i
a
при t = Т
к
. Поэтому
^ <
О
и ei > 0. Следовательно, согласно § 6-3, э. д. с. ei стремится
замедлить коммутацию, что вполне естественно, так как в резуль-
тате самоиндукции изменение тока в цепи всегда замедляется.
Среднее значение производной тока
Таким образом, среднее значение э. д. с. самоиндукции
= (6-18)
Э. д. с. взаимной индукции, реактивная э. д. с. Одновременно
с рассматриваемой секцией в машине коммутируется ряд других
секций. Обычно > Ь
к
и щетки замыкают накоротко несколько
соседних секций. Если эти секции находятся в одном и том же пазу
(число элементарных пазов м
п
>1), то между ними существует
сильная взаимоиндуктивная связь. Кроме того, секции, коммути-
руемые различными щетками и находящиеся под соседними полю-
сами, также имеют сильную взаимоиндуктивную связь, если сто-
роны этих секций расположены в общих пазах (см., например,
рис. 3-33). Вследствие сказанного в рассматриваемой коммутируе-
мой секции индуктируется э. д. с. взаимной индукции
п п
где М
п
— взаимная индуктивность между рассматриваемой сек-
цией и одновременно с нею коммутируемой секцией с порядковым
номером п, a t„ — ток этой п-й секции.
Э. д. с. ем имеет такой же знак, как и э. д. с. ei, и поэтому она
тоже стремится замедлить коммутацию. Средние значения —

также определяются равенством (6-17). Поэтому среднее значение
э. д. с. взаимной индукции
е
мср=т:2
Мя
-
(6_19)
л
Обычно э. д. с. e
L
и е
м
объединяют в общую так называемую
реактивную э. д. с.
e
r
= e
L
+ e
M
, (6-20)
так как они имеют общую природу и, кроме того, это удобно для
расчета.
Э. д. с. от поля поперечной реакции
якоря. На рис. 6-8 изображено поле реак-
ции якоря В
ад
, создаваемое токами в
обмотке якоря. Проводники коммутируе-
мой секции, расположенные на этом
рисунке под щетками, вращаются вместе
с якорем в неподвижном поле реакции
якоря, и в них индуктируется э. д. с. е
ад
,
направление которой легко определяется
по правилу правой руки и также пока-
зано на рис. 6-8.
Как видно из рис. 6-8, э. д. с. e
aq
имеет такое же направление, как и ток
секции в начале коммутации. Следова-
тельно, эта э. д. с. стремится сохранить прежнее направление
тока, является положительной и также замедляет коммутацию.
Э. д. с. в секции
e
aq
= 2B
aq
wJ
(>
v
a
, (6-21)
где B
aq
— индукция поля поперечной реакции якоря; w
c
— число
витков в секции; v
a
— окружная скорость якоря.
Все рассмотренные э. д. е.: e
L
, е
м
и e
aq
или е
г
и e
aq
— обуслов-
лены током якоря, замедляют коммутацию и являются поэтому
вредными. Как можно установить из приведенных выше формул,
эти э. д. с. пропорциональны току нагрузки и скорости вращения
якоря.
Э. д. с. от внешнего поля и коммутирующая э. д. с. В общем
случае в зоне коммутируемых секций может существовать магнит-
ное поле, внешнее по отношению к якорю, т. е. создаваемое индук-
тором. При вращении сторон коммутируемой секции в этом поле
в ней индуктируется э. д. е., которая может иметь тот или иной
знак в зависимости от направления внешнего поля.
Рис. 6-8. Определение э.д. с.
от поля реакции якоря
Естественно возникает стремление добиться с помощью внешнего
поля компенсации э. д. с. е
г
и e
aq
в секции, так как уже в машинах
мощностью порядка 0,5 кет эти э. д. с. сильно затрудняют комму-
тацию. На практике это обычно осуществляется с помощью доба-
вочных полюсов (см. § 6-6), которые создают внешнее поле необхо-
димой интенсивности и направления.
Поле реакции якоря и внешнее поле индуктора, действуя сов-
местно, образуют в зоне коммутируемых секций результирующее,
так называемое коммутирующее поле. Индуктируемая этим
полем в коммутируемой секции э. д. с. е
к
называется комму-
тирующей и определяется формулой, аналогичной (6-21):
e
K
= 2B
K
wJ
6
v
a
, (6-22)
где В
к
— индукция коммутирующего поля.
Таким образом, в конечном счете в теории коммутации рассмат-
риваются две э. д. с. — реактивная э. д. с. секции е
г
и коммутирую-
щая э. д. с. е
к
. Для достижения наилучших условий коммутации
необходимо, чтобы эти э. д. с. имели различные направления и были
равны по величине (прямолинейная коммутация) или чтобы е
к
была
несколько больше е
г
(слегка ускоренная коммутация). Для этого
коммутирующее поле должно иметь направление, противоположное
направлению поля реакции якоря.
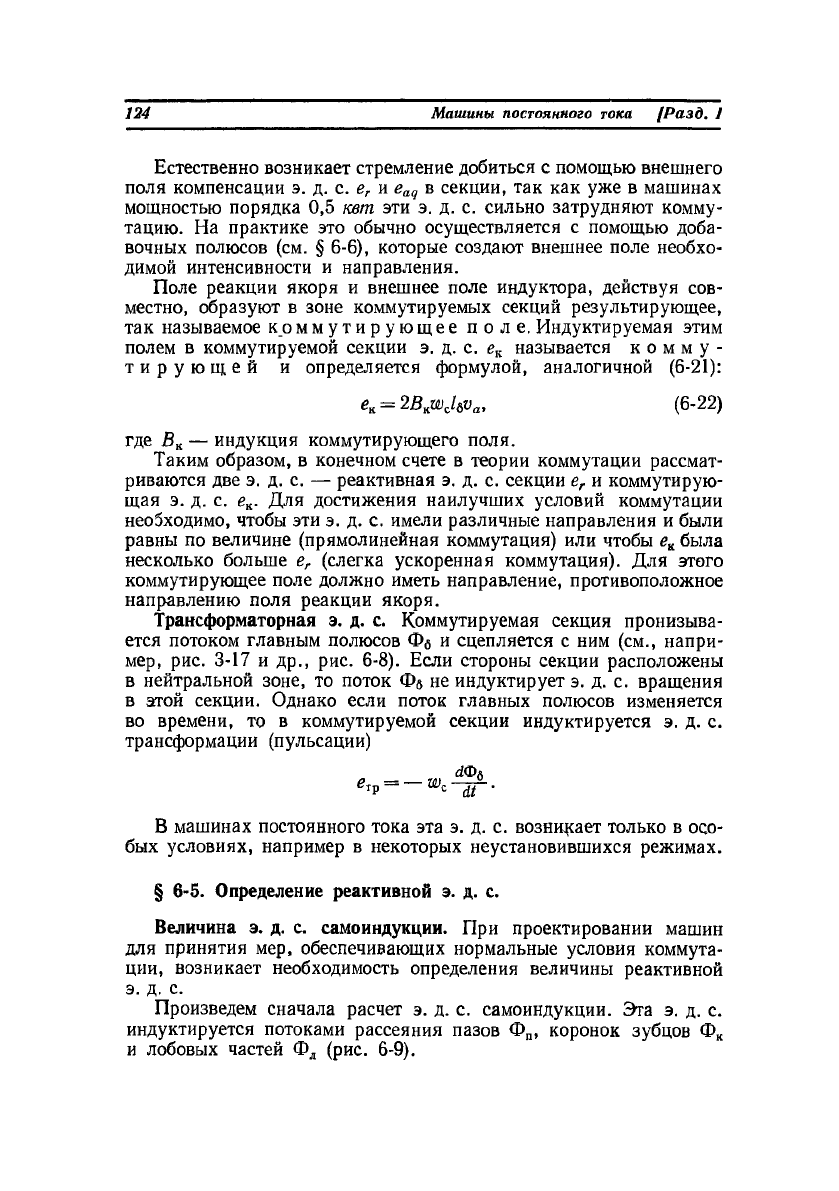
Трансформаторная э. д. с. Коммутируемая секция пронизыва-
ется потоком главным полюсов Фв и сцепляется с ним (см., напри-
мер, рис. 3-17 и др., рис. 6-8). Если стороны секции расположены
в нейтральной зоне, то поток Фв не индуктирует э. д. с. вращения
в этой секции. Однако если поток главных полюсов изменяется
во времени, то в коммутируемой секции индуктируется э. д. с.
трансформации (пульсации)
В машинах постоянного тока эта э. д. с. возникает только в осо-
бых условиях, например в некоторых неустановившихся режимах.
§ 6-5. Определение реактивной э. д. с.
Величина э. д. с. самоиндукции. При проектировании машин
для принятия мер, обеспечивающих нормальные условия коммута-
ции, возникает необходимость определения величины реактивной
э. д. с.
Произведем сначала расчет э. д. с. самоиндукции. Эта э. д. с.
индуктируется потоками рассеяния пазов Ф
п
, коронок зубцов Ф
к
и лобовых частей Ф
л
(рис. 6-9).
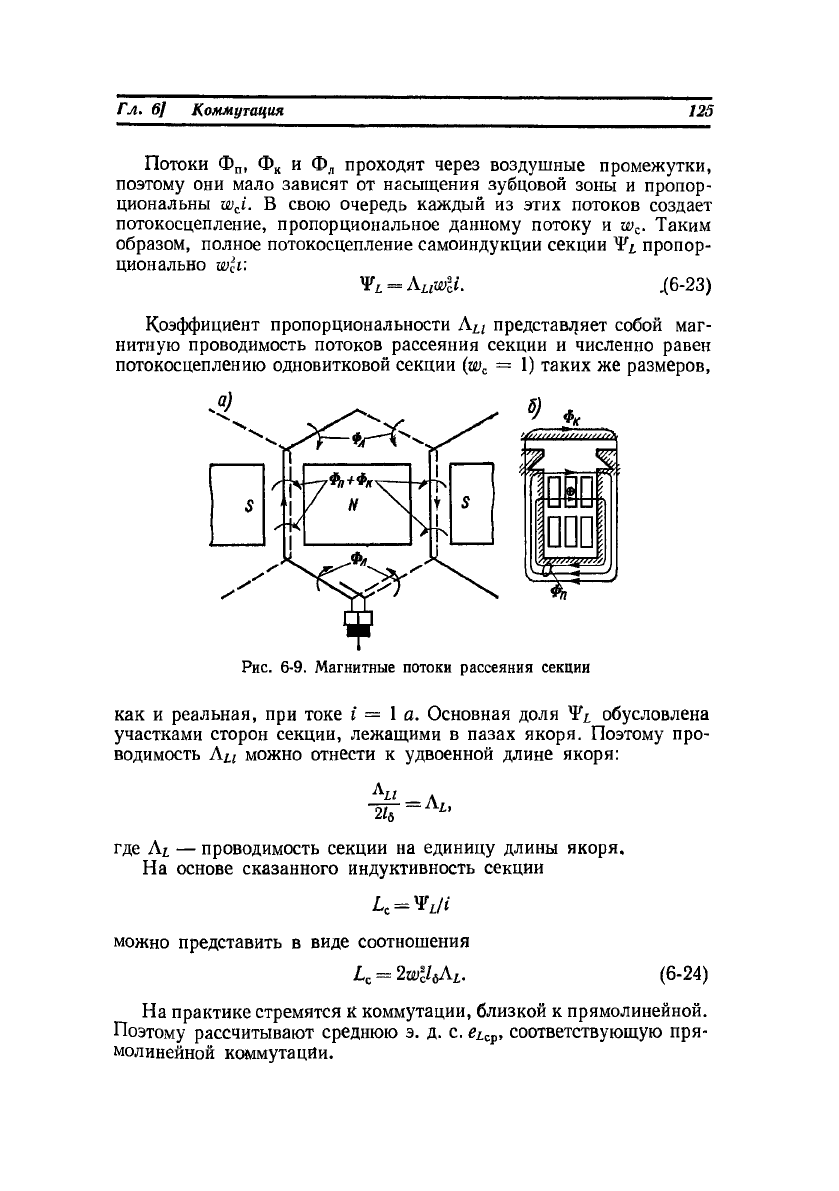
Потоки Ф
п
, Ф
к
и Ф
л
проходят через воздушные промежутки,
поэтому они мало зависят от насыщения зубцовой зоны и пропор-
циональны Wfi. В свою очередь каждый из этих потоков создает
потокосцепление, пропорциональное данному потоку и w
c
. Таким
образом, полное потокосцепление самоиндукции секции пропор-
W
L
= A
u
w'ii.
.(6-23)
Коэффициент пропорциональности А
и
представляет собой маг-
нитную проводимость потоков рассеяния секции и численно равен
потокосцеплению одновитковой секции (ш
с
= 1) таких же размеров,
9
fx
ООО
Рис. 6-9. Магнитные потоки рассеяния секции
как и реальная, при токе i = 1 а. Основная доля обусловлена
участками сторон секции, лежащими в пазах якоря. Поэтому про-
водимость Ац МОЖНО отнести к удвоенной длине якоря:
Аи
-
А
где A
l
— проводимость секции на единицу длины якоря.
На основе сказанного индуктивность секции
L^Ji
можно представить в виде соотношения
£
с
= 2wll
6
A
L
. (6-24)
На практике стремятся к коммутации, близкой к прямолинейной.
Поэтому рассчитывают среднюю э. д. с. e
Lcp
, соответствующую пря-
молинейной коммутации.
Согласно выражениям (6-18), (6-24) и (6-6),
e
Lcp
= 2wll
6
A
L
2 Kni
a
Ит-
1
)
Подставим сюда
Тогда
nD
a
A
a
v,
t„ = и п
2Kw
c
еьс
р
= 2-
(-=-—1
лО
а
•
wJtbA
a
v
a
.
(6-25)
Ф
2
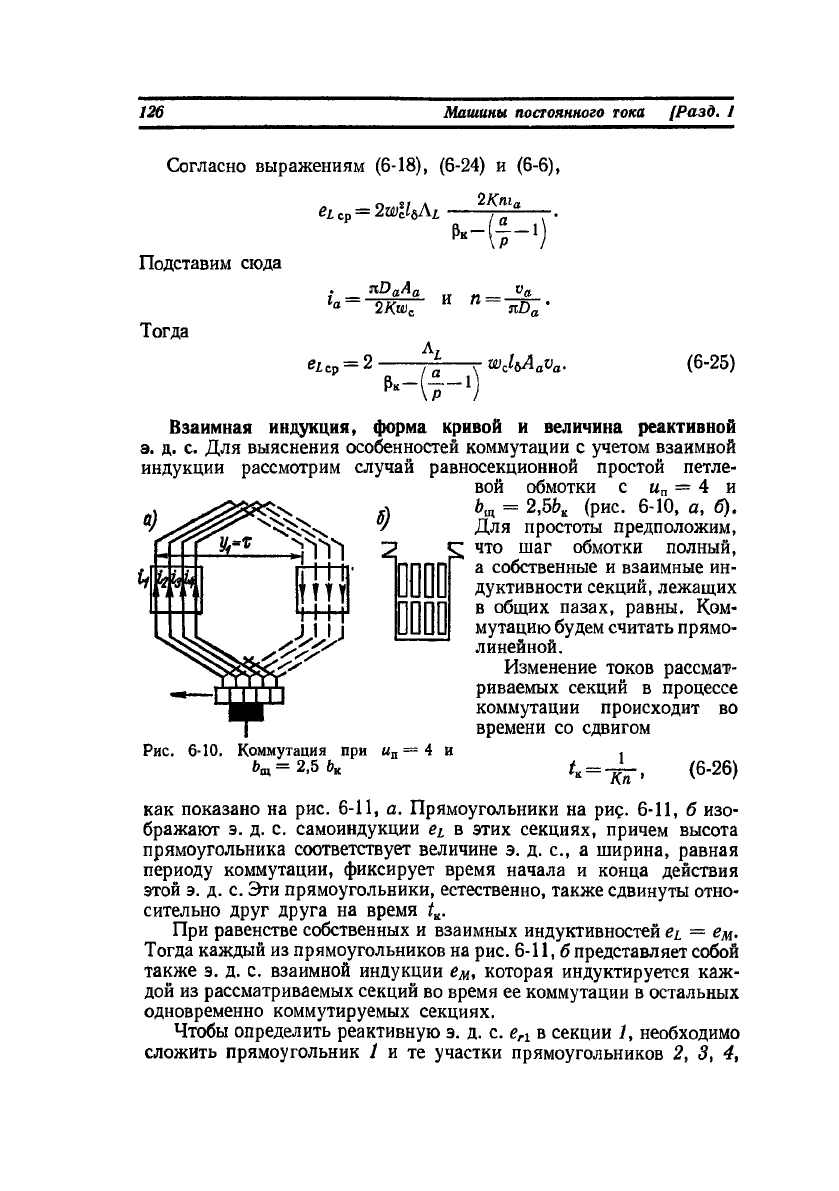
Взаимная индукция, форма кривой и величина реактивной
э. д. с. Для выяснения особенностей коммутации с учетом взаимной
индукции рассмотрим случай равносекционной простой петле-
вой обмотки с и
п
= 4 и
Ь
щ
= 2,5Ь
к
(рис. 6-10, а, б).
Для простоты предположим,
что шаг обмотки полный,
а собственные и взаимные ин-
дуктивности секций, лежащих
в общих пазах, равны. Ком-
мутацию будем считать прямо-
линейной.
Изменение токов рассмат-
риваемых секций в процессе
коммутации происходит во
времени со сдвигом
Рис. 6-10.
Коммутация при
Ь
щ
= 2,5 6
К
"п= 4 и
к-
1
Кп
(6-26)
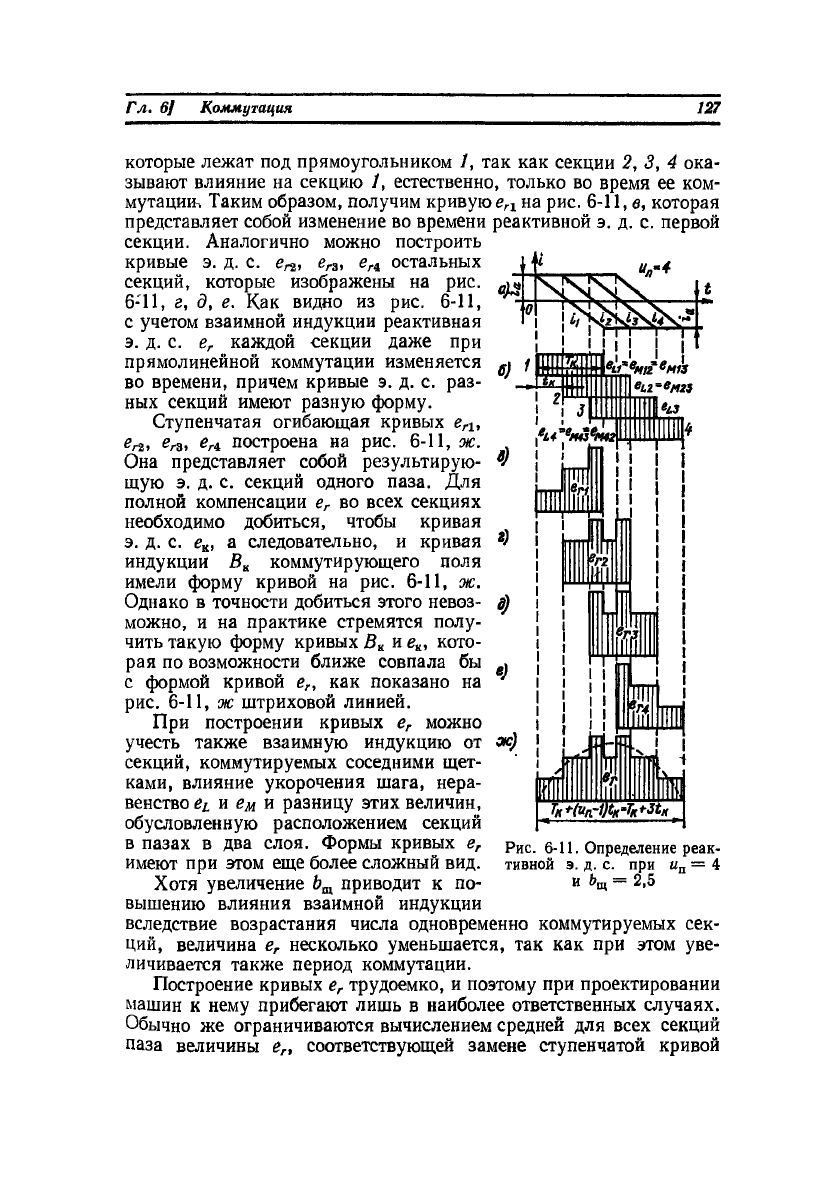
как показано на рис. 6-11, а. Прямоугольники на рис. 6-11, б изо-
бражают э. д. с. самоиндукции ei в этих секциях, причем высота
прямоугольника соответствует величине э. д. е., а ширина, равная
периоду коммутации, фиксирует время начала и конца действия
этой э. д. с. Эти прямоугольники, естественно, также сдвинуты отно-
сительно друг друга на время t
K
.
При равенстве собственных и взаимных индуктивностей e
L
= е
м
.
Тогда каждый из прямоугольников на рис. 6-11,6 представляет собой
также э. д. с. взаимной индукции е
м
, которая индуктируется каж-
дой из рассматриваемых секций во время ее коммутации в остальных
одновременно коммутируемых секциях.
Чтобы определить реактивную э. д. с. е
п
в секции 1, необходимо
сложить прямоугольник I и те участки прямоугольников 2, 3, 4,
e
L1*
e
Mt2
e
Mt3
*13
которые лежат под прямоугольником 1, так как секции 2, 3, 4 ока-
зывают влияние на секцию 1, естественно, только во время ее ком-
мутации, Таким образом, получим кривую е
п
на рис. 6-11, в, которая
представляет собой изменение во времени реактивной э. д. с. первой
секции. Аналогично можно построить
кривые э. д. с. е
п
, е
г3
, е
г4
остальных
секций, которые изображены на рис.
6-'11, г, д, е. Как видно из рис. 6-11,
с учетом взаимной индукции реактивная
э. д. с. е
г
каждой секции даже при
прямолинейной коммутации изменяется
во времени, причем кривые э. д. с. раз-
ных секций имеют разную форму.
Ступенчатая огибающая кривых е
п
,
е
гз,
е
г4 построена на рис. 6-11, ж.
Она представляет собой результирую-
щую э. д. с. секций одного паза. Для
полной компенсации е
г
во всех секциях
необходимо добиться, чтобы кривая
э. д. с. е
к
, а следовательно, и кривая
индукции В
к
коммутирующего поля
имели форму кривой на рис. 6-11, ж.
Однако в точности добиться этого невоз-
можно, и на практике стремятся полу-
чить такую форму кривых В
к
и е
к
, кото-
рая по возможности ближе совпала бы
с формой кривой е
г
, как показано на
рис. 6-11, ж штриховой линией.
При построении кривых е
г
можно
учесть также взаимную индукцию от
секций, коммутируемых соседними щет-
ками, влияние укорочения шага, нера-
венство e
L
и е
м
и разницу этих величин,
обусловленную расположением секций
в пазах в два слоя. Формы кривых е
г
имеют при этом еще более сложный вид.
Хотя увеличение Ь
щ
приводит к по-
вышению влияния взаимной индукции
вследствие возрастания числа одновременно коммутируемых сек-
ций, величина е
г
несколько уменьшается, так как при этом уве-
личивается также период коммутации.
Построение кривых е
г
трудоемко, и поэтому при проектировании
машин к нему прибегают лишь в наиболее ответственных случаях.
Обычно же ограничиваются вычислением средней для всех секций
паза величины е„ соответствующей замене ступенчатой кривой
Рис. 6-11. Определение реак-
тивной э. д. с. при ы
п
= 4
и Ь
щ
= 2,5

128
Машины постоянного тока [Разд. I
на рис. 6-11, ж прямоугольником, площадь которого равна пло-
щади фигуры, ограниченной этой кривой и осью абсцисс. Формулу
для е
г
при этом можно получить, если в выражении (6-25) заменить
на
Л,+Л
м
л
6 = —тНТ
=
ТГ-Т' <
6
"
27
>
М-Н Ч-Н
где Л
Д1
— средняя проводимость для потоков взаимной индукции,
а Л = A
l
+ А
м
.
Таким образом, получим формулу Пихельмайера, которой поль-
зуются в расчетной практике:
e
r
= 2lw
t
l
6
A
a
v
a
. (6-28)
Магнитные проводимости Ли? зависят в основном от геометри-
ческих размеров пазов и лобовых частей секции, а также от других
факторов (магнитньГе свойства бандажной проволоки и т. д.).
Формулы для вычисления Л и I приводятся в руководствах по
проектированию машин постоянного тока [21, 22, 23, 40, 41]. В малых
и средних машинах, а также в крупных тихоходных машинах
с малой длиной якоря | = (5 -г- 8) 1СГ
6
гн/м, а в крупных тихоход-
ных машинах с большой длиной якоря и в крупных быстроходных
машинах g = (3,5 -г- 5,0) 10"
6
гн/м.
Из равенства (6-28) видно, что е
г
тем больше, чем больше ско-
рость вращения, линейная нагрузка и длина машины и чем больше
витков в секции.
Если можно было бы добиться идеальной компенсации е
г
с по-
мощью коммутирующей э. д. с. е
к
, то теоретически можно было бы
иметь хорошую коммутацию при весьма больших значениях е
г
.
Однако, как было выяснено в связи с рассмотрением рис. 6-11, ж,
добиться совпадения форм кривых е
к
и е
Г
практически невозможно,
и величина нескомпенсированных участков кривой е
г
тем больше,
чем больше сама е
г
. Поэтому величина е
г
решающим образом влияет
на качество коммутации. При наличии коммутирующего поля
необходимо, чтобы e
r
7 -г- 10 в, а при отсутствии этого поля
e
r
+ e
aq
< 2 3 в.
Ширина зоны коммутации. Время Т
П
коммутации и„ секций
одного паза для обмотки с полным шагом, согласно рис. 6-11, ж,
равно
T
a
= T
K
+ (u
a
-\)t
K
.
Гл. 6J Коммутация
129
При укороченном или удлиненном шаге обмотки нижние сек-
ции будут коммутироваться в зависимости от направления враще-
ния якоря раньше или позже верхних. Если шаг укорочен или
удлинен на е секционных сторон (см. § 3-2), то время коммутации
секционных сторон одного паза увеличивается на et
K
. Поэтому в
общем случае
T
n
= T
K
+ (u
a
-\+e)t
K
.
Подставив сюда значения Т
к
и t
K
из (6-6) и (6-26), получим
Г
" = Кп • (
6
"
29
)
Зоной коммутации называется дуга окружности
якоря, в пределах которой перемещаются секционные стороны
паза во время коммутации.
Ширину этой зоны Ь
з к
получим, если умножим Т
п
на окружную
скорость якоря
v
a
= я D
a
n.
Таким образом,
Если подставить в выражение (6-30)
ПРд _ ЛР
К
Рд . Рд
К К Р
к
к
D*
и учесть равенство (6-3), то формула (6-30) приобретет несколько
иной вид:
(6-31)
В выражения (6-30) и (6-31) нужно подставлять всегда абсолют-
ное значение е.
Величина b
3 к
должна быть не больше 50—65% расстояния
между наконечниками соседних главных полюсов. В противном
сл
учае коммутируемые секции попадают в зону сильного поля
главных полюсов и условия коммутации резко ухудшаются. В связи
с
этим из выражений (6-30) и (6-31) можно заключить, что большое
Жорочение шага обмотки нежелательно.
§ 6-6. Способы улучшения коммутации
Для создания хороших условий коммутации необходимо прежде
всего обеспечить надлежащее состояние коллектора и щеточного
аппарата, чтобы устранить механические причины искрения (см.
§ 6-2). Ниже рассматриваются способы обеспечения необходимых
электромагнитных условий коммутации. Эти способы направлены
на уменьшение добавочного тока коммутации или тока короткого
замыкания коммутируемой секции и сводятся к следующим меро-
приятиям: 1) созданию коммутирующей э. д. с. с помощью доба-
вочных полюсов или сдвига щеток с геометрической нейтрали,
2) уменьшению реактивной э. д. с.
и 3) увеличению сопротивления
цепи коммутируемой секции.
Добавочные полюсы.
Основным способом улучше-
ния коммутации в современных
машинах постоянного тока яв-
ляется создание коммутирующе-
го магнитного поля с помощью
добавочных полюсов.
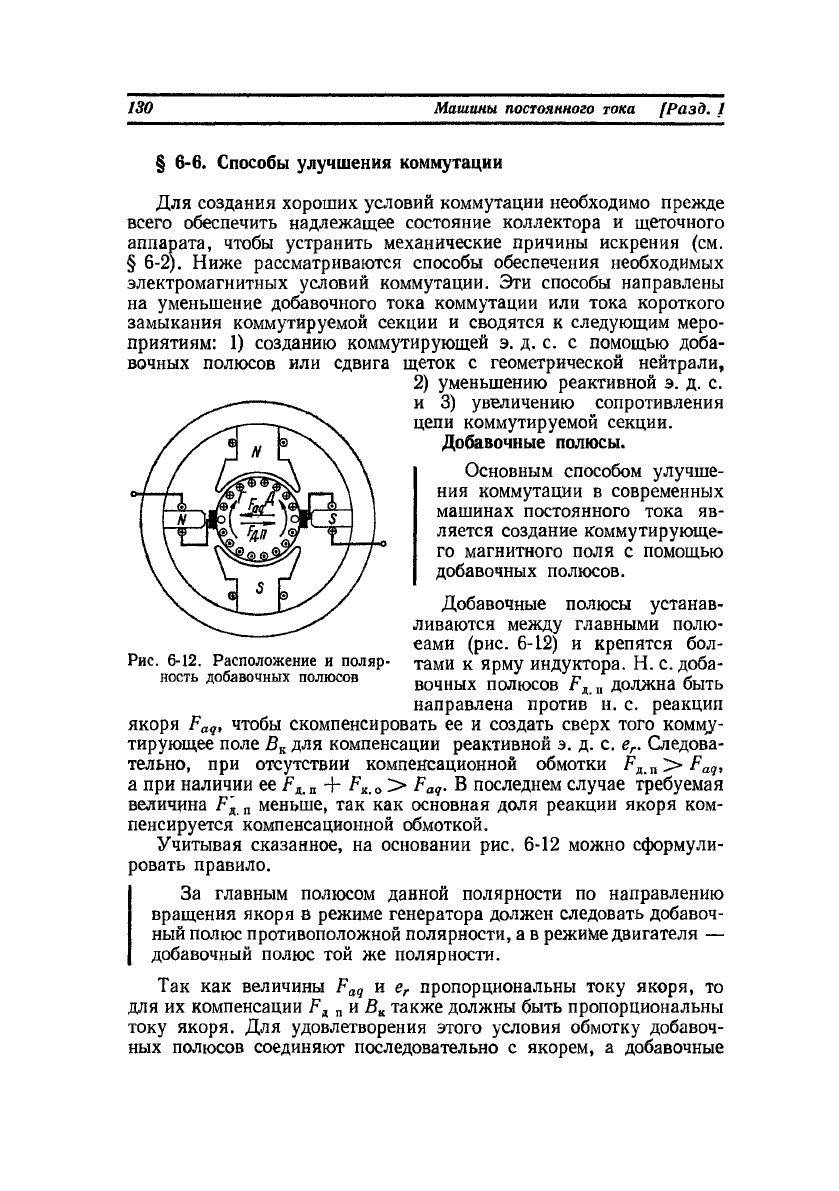
Добавочные полюсы устанав-
ливаются между главными полю-
еами (рис. 6-12) и крепятся бол-
тами к ярму индуктора. Н. с. доба-
вочных полюсов Р
Д11
должна быть
направлена против н. с. реакции
якоря F
aq
, чтобы скомпенсировать ее и создать сверх того комму-
тирующее поле В
к
для компенсации реактивной э. д. с. е
г
. Следова-
тельно, при отсутствии компенсационной обмотки >- F
aq
,
а при наличии ее Р
ДшП
+ F
K 0
> F
aq
. В последнем случае требуемая
величина Fд „ меньше, так как основная доля реакции якоря ком-
пенсируется компенсационной обмоткой.
Учитывая сказанное, на основании рис. 6-12 можно сформули-
ровать правило.
За главным полюсом данной полярности по направлению
вращения якоря в режиме генератора должен следовать добавоч-
ный полюс противоположной полярности, а в режиме двигателя —
добавочный полюс той же полярности.
Так как величины F
aq
и е
г
пропорциональны току якоря, то
для их компенсации
п
и В
к
также должны быть пропорциональны
току якоря. Для удовлетворения этого условия обмотку добавоч-
ных полюсов соединяют последовательно с якорем, а добавочные
ность добавочных полюсов