Васильев К.К. Теория автоматического управления (следяшие системы)
Подождите немного. Документ загружается.

81
f
m
для реальных процессов не удается. Вторая проблема – слишком
высокая частота временного квантования, которая получается при
использовании теоремы Котельникова. Поэтому при проектирова-
нии систем управления обычно производят расчеты дополнитель-
ных погрешностей системы, вызванных временной дискретизацией.
Интервал квантования Т
кв
при этом выбирается исходя из заданной
величины погрешности за счет временного квантования.
* * *
Итак, в современных цифровых сиcтемах управления обычно
выбирается достаточно малый интервал амплитудного квантования.
При этом дополнительные погрешности системы, вызванные ам-
плитудной дискретизацией, оказываются малыми. Во многих слу-
чаях ими пренебрегают. Вместе с тем выбор интервала временно-
го квантования в соответствии с теоремой Котельникова часто при-
водит к неоправданному повышению
тактовой частоты вычисли-
тельной машины. Поэтому для анализа систем управления, рабо-
тающих в дискретном времени, применяют специальные методы
анализа, которые мы рассмотрим на следующих занятиях.
4.2. ЦИФРОВЫЕ ФИЛЬТРЫ
Как мы уже знаем, основные операции, которые выполняет
ЦВМ в контуре управления, связаны с реализацией цифровых
фильтров. На этой лекции вначале мы установим связь между уже
известными нам аналоговыми фильтрами и соответствующими
цифровыми фильтрами. Затем познакомимся с основными метода-
ми и алгоритмами цифровой фильтрации сигналов. Рассматривае-
мые методы важны не
только для систем управления. Они приме-
няются в самых различных системах обработки сигналов, напри-
мер, в системах цифровой связи.
Связь аналоговых и цифровых фильтров
Любой линейный аналоговый фильтр с передаточной функ-
цией H(p) описывается дифференциальным уравнением следующе-
го общего вида:
82
)(...
)(
)(...
)()(
0
1
1
1
tgb
d
t
tgd
btxa
d
t
txd
a
d
t
txd
m
m
m
n
n
n
n
n
++=++
−
−
.
Предположим, что входные и выходные сигналы этого
фильтра наблюдаются в дискретные моменты времени t
i
= iT
кв .
При малых интервалах временного квантования Т
кв
можно при-
ближенно заменить производную первого порядка на отношение
разностей:
кв
i
кв
ii
кв
ii
ii
кв
квii
Т
x
Т
xx
T
txtx
xx
T
Ttxtx
dt
dx
∆
=
−
=
−
=−+
−
−
=
−−
−
11
1
)()(
)(
)()(
~
.
Соответственно вторая производная может быть приближенно за-
писана в виде
dx
dt
xx
ТТ
xx x x
Т
xx x
x
Т
ii
кв кв
ii i i
кв
ii i
i
кв
2
2
1
22
112
2
12
2
2
11
2
~
()()
=
−
=−−+=−+=
−
−−− −−
∆∆ ∆
.
Третья производная
dx
dt
xx
Т
xx x x x
Т
xx x x
Т
x
Т
ii
кв
ii i i i
кв
ii i i
кв
i
кв
3
3
221
2
11 2 3
2
123
2
31
2
22 33
~
=
−
=
−−+−
=
−+−
=
−−−−− −−−−
∆∆ ∆
.
Продолжая этот процесс замены производных конечными разно-
стями, получим
dx
dt Т
xcx cx cx
n
n
кв
n
ii i nin
~
(...)=++++
−− −−
1
112 2 1
.
Подставим теперь все выражения для производных в диффе-
ренциальное уравнение аналогового фильтра. Получим следующее
выражение для эквивалентного цифрового фильтра:
mimiininiii
gggxxdxx
−−−−−
+
+
+
++++=
β
β
β
α
α
......
1102211
.
Таким образом, мы нашли цифровой эквивалент аналогового
фильтра; все операции цифровой фильтрации могут выполняться
теперь на ЭВМ.
Пример 1. Пусть имеется апериодическое звено с переда-
точной функцией
pT
k
pH
+
=
1
)(
. Выходной сигнал этого звена
x(p) = H(p) g(p) или x(p) (1+pT) = kg(p). Во временной области
функционирование звена описывается соответствующим диффе-
ренциальным уравнением:
)()(
)(
tkgtx
d
t
tdx
T
=+ .

83
Найдем эквивалентный этому звену цифровой фильтр. Для
этого заменим
квii
Тxxdttdx /)(
~
/)(
1−
−
=
и тогда
kgixxx
Т
Т
iii
кв
=+−
−
)(
1
.
После элементарных преобразований получим:
x
Т T
x
k
TT
gi
i
кв
i
кв
=
+
+
+
−
1
11
1
//
или
iii
gxx
011
β
α
+
=
−
,
где
α
1
1
1
=
+ TT
кв
/
,
ђ‰
TT
k
/1
0
+
=
β
.
Анализ общего выражения для цифрового фильтра показыва-
ет, что фильтр состоит из двух частей. Первая часть, соответст-
вующая случаю
0...
21
=
==
m
β
β
β
, записывается в виде
gixxxx
niniii 02211
...
β
α
α
α
+
+
+
+
=
−−−
.
Вычисление каждого следующего значения x
i
выходного
сигнала фильтра осуществляется с помощью взвешивания преды-
дущих выходных значений фильтра
xx
iin
−
−
1
,... и одного входного
значения g
i
. Такой фильтр называется рекурсивным фильтром n-
го порядка
. Если же
α
α
α
12
0
=
=
==...
n
, то
xgg g
iii mim
=+ ++
−−
ββ β
011
... .
В этом случае для фильтрации используется только текущее
g
i
и предыдущие значения входного сигнала, взвешиваемые с ко-
эффициентами
ββ
0
,...
m
. Такой фильтр называется нерекурсивным,
или
фильтром скользящего окна.
Математическое описание цифровых систем
Пусть процесс с дискретным временем g
i
поступает на
вход цифрового фильтра. На выходе будет уже другой процесс x
i
.
Как можно описать характеристики процесса g
i
, и как они изменят-
ся после прохождения через цифровой фильтр?
Для процессов с непрерывным временем подобная проблема
решается на основе преобразования Лапласа или преобразования
Фурье. Действительно, если известен спектр непрерывного входно-
го процесса
dtetgjg
tj
∫
∞
∞−
−
=
ω
ω
)()(
, то спектр выходного сигнала
G(j
ω) = H(jω) g(jω) , где H(jω) – передаточная функция фильтра.
84
Для процессов с дискретным временем существуют точно
такие же по смыслу соотношения. Для них вводится дискретное
преобразование Фурье:
vTj
v
egjg
ω
ν
ω
−
∞
=
∑
=
0
)(
или
{
}
.)( giФjg
=
ω
Отметим следующие два важных свойства дискретного пре-
образования Фурье:
1) линейность
{}
{
}
{
}
vibФgiaФbviagiФ
+
=
+
;
2)
{}{}
Tmj
imi
egФgФ
ω
−
−
=
.
Применение этих свойств позволяет легко находить спектр
процесса на выходе цифрового фильтра.
Пример 2. Пусть цифровой фильтр описывается следующим
выражением:
iii
gxdxxi
β
α
+
+=
−− 2211
. Преобразуем по Фурье левую и
правую часть этого выражения:
)()()()(
2
21
ωβωαωαω
ωω
jgjxejxejx
TjTj
++=
−−
.
Тогда
)()()(
ω
ω
ω
jgj
H
j
x
=
, где
TjTj
ee
jH
ωω
αα
β
ω
2
21
1
)(
−−
−−
=
–
передаточная функция цифрового фильтра.
Так же, как и в системах с непрерывным временем,
Hj()
ω
называется амплитудно-частотной характеристикой цифрового
фильтра, а Arg H(j
ω) – фазочастотной характеристикой. Если H(jω)
– передаточная функция замкнутой цифровой системы управления,
то полюсы р
1
и
р
2
(нули знаменателя)
Hp
ee
pTкв pTкв
()=
−−
−−
β
αα1
12
2
долж-
ны лежать в левой полуплоскости комплексного переменного.
Вместе с тем, появляется очевидное неудобство использова-
ния дискретного преобразования Фурье: передаточные функции
содержат экспоненты в знаменателе и числителе. Поэтому было
предложено в дискретном преобразовании Фурье ввести новую пе-
ременную
ez
jT
кв
ω
= . Тогда дискретное преобразование Фурье
gj ge
i
jiTкв
i
()ω
ω
=
−
=
∞
∑
0
превращается в так называемое Z–преобразование:
gz gz
i
i
i
()=
−
=
∞
∑
0
. Обычно записывают
{
}
gz Zg
i
()
=
.
Z – преобразование имеет ряд свойств, аналогичных дис-
кретному преобразованию Фурье. Отметим линейность Z – преоб-
разования и
{}{}
Zgi m Zgiz
m
−=
−
.
85
Пример 3. Рассмотрим цифровой фильтр, описываемый
уравнением:
1102211 −−−
+
+
+
=
iiiii
ggxxx
β
β
α
α
. Применим Z–
преобразование к правой и левой части. Тогда
)()()()()(
1
10
2
2
1
1
zgzzgzxzzxzzx
−−−
+++=
ββαα
, т.е.
)()()( zgz
H
z
x
=
, где
2
2
1
1
10
1
)(
−−
−−
+
=
zz
z
zH
αα
β
β
. Для нахождения амплитудно-частотной харак-
теристики фильтра можно подставить
Tj
ez
ω
=
и найти
)()(
Tj
ezHwH
ω
== .
Таким образом, с помощью Z–преобразования легко полу-
чить передаточную функцию любого линейного цифрового фильт-
ра.
Устойчивость систем управления принято проверять с помо-
щью анализа передаточной функции H(z). Если
ze e
jTкв pTкв
==
ω
, то
в том случае, когда корень p = a + jb находится в левой полуплоско-
сти комплексного переменного, т.е. когда
система устойчива, то
ze e e
aj Tкв aTкв jTкв
==
⋅
+()ββ
, и если a < 0 , то z < 1.
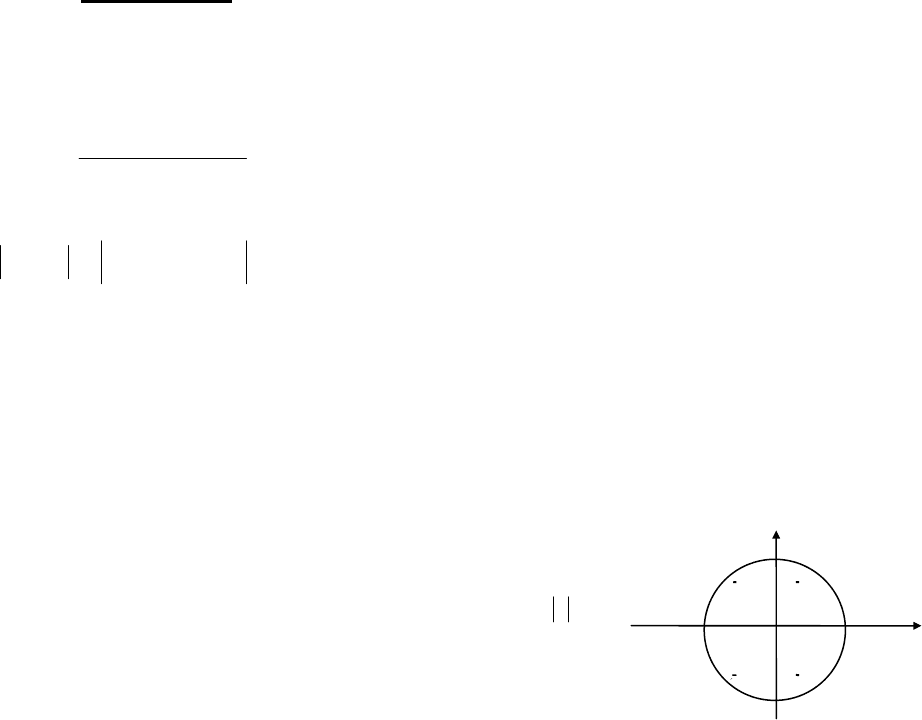
Таким образом, условие устойчивости мож-
но сформулировать следующим образом.
Цифровая система управления или цифро-
вой фильтр устойчив, если все корни знаме-
нателя передаточной функции H(
z) находится внутри единичного
круга на плоскости комплексного переменного (рис. 49).
* * *
Полученные результаты позволяют реализовать процесс
фильтрации в виде программы для специализированной или уни-
версальной ЭВМ. Как мы видели, существует приближенный спо-
соб построения цифрового фильтра, основанный на аналоговом
прототипе. Точный способ заключается в подборе подходящих ко-
эффициентов
ααβββ
101
,..., , , ,...,
nm
цифрового фильтра. Более под-
робные сведения о цифровой фильтрации можно найти в книгах
[16–18].
z
1
z
2
z
3
z
4
Y
m
R
l
Рис. 49
86
4.3. ДЕЙСТВИЕ ПОМЕХ НА ЦИФРОВЫЕ СИСТЕМЫ
УПРАВЛЕНИЯ
Рассмотрим особенности анализа цифровых систем управления,
находящихся под воздействием помех. Вначале приведем основные
формулы, позволяющие определить дисперсию ошибки сопровож-
дения, обусловленную действием помех. Затем кратко проанализи-
руем методы построения оптимальных линейных дискретных сис-
тем, которые в настоящее время широко используются при проек-
тировании и анализе цифровых систем управления.
Дисперсия ошибки в цифровых системах управления
Цифровую систему управления с учетом действия помех
можно представить в виде рис. 50.
На вход системы действует сумма
z
i
управляющего воздействия ggt
ii
=
~
() и
помех Ni = N(ti). В результате действия
помехи в выходном сигнале x
i
содер-
жится случайная составляющая, которую
можно охарактеризовать величиной
дисперсии
2
x
σ
. При этом цифровая система управления описывает-
ся разностным уравнением:
mimiininii
zzzxxx
−−−−
+
+
+
+
+
++=
β
β
β
α
α
.........
11011
.
Поскольку система управления линейна, то можно отдельно
рассматривать прохождение сигналов и помех через эту систему.
Таким образом, достаточно найти дисперсию процесса, описывае-
мого следующим уравнением общего вида:
mimiininii
NNNxxx
−−−−
+
+
+
+
++=
β
β
β
α
α
......
11011
.
Помехой в системе управления обычно служат независимые
отсчеты N
i
гауссовских случайных величин с нулевым средним и
дисперсией
2
n
σ
. В общем случае дисперсия результирующего
процесса
x
i
находится с помощью известных методов теории веро-
ятностей. Действительно, разностное уравнение представляет собой
закон преобразования случайных величин
{
}
i
N в случайные вели-
чины
{}
i
x
. Поэтому любые вероятностные характеристики
{
}
x
i
выражаются через известные характеристики помех.
g
i
z
i
x
i
n
i
САУ
Рис. 50
87
Пример.
Система первого порядка.
Пусть система управления описывается простейшим разно-
стным уравнением вида
iii
Nxx
011
β
α
+
=
−
.
Найдем дисперсию ошибки на выходе такой системы. Для
этого возведем левую и правую части в квадрат и найдем матема-
тическое ожидание. После возведения в квадрат получаем
22
0101
2
1
2
1
2
2
iiii
NNixxx
ββαα
++=
−−
.
Теперь находим математическое ожидание левой и правой
частей:
22
0
22
1
2
nxx
σβσασ
+= .
Таким образом, дисперсия ошибки за счет действия помех
2
2
1
2
0
2
1
nx
σ
α
β
σ
−
=
. Заметим, что
1
1
<
α
, т.к. в противном случае система
управления будет неустойчивой.
Оптимальные цифровые системы
Описания динамики движения объектов в цифровых сис-
темах
В непрерывных системах для описания динамики движения
объекта или входного сигнала системы управления используется
следующее стохастическое дифференциальное уравнение:
)()(
)(
ttag
d
t
tdg
ξ
=+
, где
)(
t
ξ
– белый шум. В этом случае траектория
движения объекта представляет собой одну из множества реализа-
ций случайного процесса g(t) .
В цифровых системах дифференциальному уравнению пер-
вого порядка будет соответствовать разностное уравнение
iii
gg
ξ
ν
+=
−1
, где
ν
– постоянный коэффициент;
i
ξ
– гауссовские не-
зависимые случайные величины с дисперсией
2
ξ
σ
. Определим веро-
ятностные характеристики возможных траекторий объекта в дис-
кретном времени. Так же, как и в рассмотренном примере, возведем
левую и правую части уравнения движения объекта в квадрат и
найдем математическое ожидание. Получим
22
g
2
g
ξ
σνσσ
+=
или
ν
σ
σ
ξ
−
=
1
2
2
g
. Эта величина дисперсии
σ
g
2
определяет динамический
диапазон возможных отклонений траектории от среднего значения.

88
Другим параметром, описывающим движение объекта, явля-
ется характеристика скорости изменения траектории. В рассмат-
риваемом случае мерой этой скорости может быть коэффициент
корреляции двух соседних значений g(t
i–1
) =g
i–1
и g(ti) = g
i
траекто-
рии. Для его нахождения умножим левую и правую части уравне-
ния на g
i–1
и найдем их средние значения:
{}
{
}
{}
1
2
11 −−−
+=
iiiii
gMgMggM
ξν
. Поскольку
{
}
Mg
ii
ξ
−
=
1
0
, то коэффици-
ент корреляции
{}
{}
ν
=
−
−
2
1
1
i
ii
gM
ggM
. Таким образом, параметр
ν<1
ока-
зывается равным значению коэффициента корреляции двух сосед-
них значений траектории.
Нормированная корреляционная функция последовательно-
сти
{}
g
i
описывается при этом простым выражением
||
)(
m
mR
ν
=
.
Допустим, что с помощью приведенного уравнения мы хо-
тим описать траекторию движения объекта, значительно изменяю-
щегося за 100 тактовых интервалов. Это означает, что
100
(100) 0,5=ν =R . В этом случае можно выбрать
100
0,5 0,993ν= ≅ .
Оптимальная цифровая линейная система управления
Пусть на вход линейной системы управления действует сум-
ма
z
i
=g
i
+ n
i
управляющего сигнала g
i
, который описы-
вается уравнением
iii
vgg
ξ
+
=
−1
и помехи n
i
в виде независимых
отсчетов мешающего процесса с дисперсией
2
n
σ
.
Состояние цифровой линейной системы управления
x
i
связа-
но с входным сигналом следующим разностным уравнением
iiiii
zxx
β
α
+=
−1
.
Основной задачей системы является минимизация дисперсии
ошибки
iii
gx −=
ε
управления. Рассмотрим возможности построе-
ния оптимальной системы, для которой дисперсия ошибки мини-
мальна. Для минимизации дисперсии имеется возможность выбора
коэффициентов
i
α
и
i
β
системы управления.
Итак, необходимо найти
{
}
}.){(min)(min
22
iii
gxMM −=
ξ
Подставим
в формулу для ошибки известные соотношения:
.n)1(g)1((
n)g)(1(xg)ng(x
iiii1ii1iii
iii1i1iiiiii1iii
βεβεαβνα
β
ε
ν
β
α
β
α
ε
+−++−+
=+
+
−
+
=
−++=
−−
−−−

89
Величины g
i–1
имеют большие значения. Если необходимо
минимизировать ошибки, то нужно положить
α
ν
β
+
−=()
i
10
. Тогда
εαε β
ε
β
iii i iii
n=+−+
−1
1() или
ε
ν
β
ε
β
ε
β
iiiiiii
n
=
−
+
−
+
−
() ()11
1
.
В этой формуле отражены три составляющие ошибки систе-
мы управления. Первое слагаемое учитывает ошибку
ε
iii
xg
−−−
=
−
111
на предыдущем шаге работы системы. Второе слагаемое – дина-
мическая ошибка за счет изменения траектории движения. Третье
слагаемое
β
ii
n
– ошибка, вызванная действием помех на систему
управления. Поскольку все слагаемые являются независимыми, то
дисперсия будет равна сумме дисперсий ошибок всех трех слагае-
мых:
DD
iiii in
=− +− +
−
νβ β σβσ
ξ
22
1
22 22
11() ()
,
где
{}
DM
ii
=ε
2
,
{}
σε
ξ
22
= M
i
,
{
}
σ
ni
Mn
22
=
.
Продифференцируем D
i
по β
i
и приравняем производную к
нулю. Легко подсчитать, что минимальное значение P
i
= D
i
min
дисперсии ошибки достигается при
)P)(1/(P)(
эi
12
nэi
12
ni
−−
+=
σσβ
, где
2
1i
2
эi
PP
ξ
σν
+=
−
. После подстановки оптимального значения
β
i
в
уравнение системы получаем следующий алгоритм функциониро-
вания оптимальной цифровой системы управления:
)(
1
2
эii
n
iэii
xZPxx −+=
σ
,
)
1
1/(
2
эi
n
эii
PPP
σ
+=
,
2
1
2
ξ
σ
+=
−iэi
PVP
,
где
1−
=
iэi
xx
ν
.
В этом уравнении величина
эi
x является экстраполированной
на один шаг траекторией объекта или прогнозом значения траекто-
рии. Действительно, на предыдущем шаге состояние системы было
1−i
x . Динамика изменения траектории описывается уравнением
gg
iii
=+
−
νξ
1
. Лучшее, что мы можем сделать с точки зрения про-
гноза траектории движения g
i
– предсказать, что сигнал g
i
будет
иметь величину
х
эi
=
1−i
x
ν
.
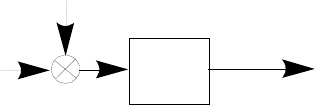
Таким образом, в найденной системе управления вначале
формируется прогноз
x
эi
траектории движения. Затем определяется
рассогласование
zx
i эi
− между сделанным прогнозом и очередным
сигналом управления
z
i
, искаженном помехами. После этого оче-
редное состояние системы
x
i
формируется как сумма прогноза x
эi
и взвешенного рассогласования.
90
Весовым коэффициентом
р /
in
σ
2
служит отношение диспер-
сии ошибки системы управления
р
i
и дисперсии помех, дейст-
вующих на систему управления.
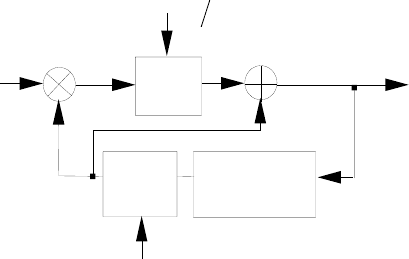
Структурная схема рас-
смотренной оптимальной цифро-
вой системы управления может
быть представлена в виде рис.51.
* * *
Рассмотренные вопросы действия помех на цифровые систе-
мы управления позволяют решить две важные задачи. Во–первых,
для любой заданной линейной системы управления можно дать
оценку ее эффективности, т.е. оценить дисперсию ошибки за счет
действия помех. Вторая важная задача – построение оптимальной
цифровой системы управления, учитывающей как динамику дви-
жения объекта
, так и величину помехи, действующей на систему
управления.
4.4. МНОГОМЕРНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ
УПРАВЛЕНИЯ
Рассмотрим два вопроса, связанные с современными метода-
ми построения систем управления. Вначале проанализируем мно-
гомерный дискретный фильтр Калмана, который применяется при
управлении системами по нескольким параметрам одновременно.
Затем кратко рассмотрим адаптивные системы, которые предназна-
чены для работы в условиях изменяющихся внешних воздействий.
Многомерный цифровой фильтр Калмана
Модели входных сигналов
В предыдущем разделе была рассмотрена модель движения
объекта в виде скалярного разностного уравнения
gvg
ii
=+
−ξ
ξ
1
. При
Задержка
на такт
Х
–
+
+
+
Х
z
i
x
эi
x
i
x
i−1
ν
p
i
n
σ
2
Рис. 51