Васильев К.К. Теория автоматического управления (следяшие системы)
Подождите немного. Документ загружается.

11
ма управления. В таких системах выходной сигнал
(
)
xt передается
на вход и сравнивается с заданной функцией
(
)
gt. Цепь, по кото-
рой происходит передача сигнала, называется цепью главной об-
ратной связи.
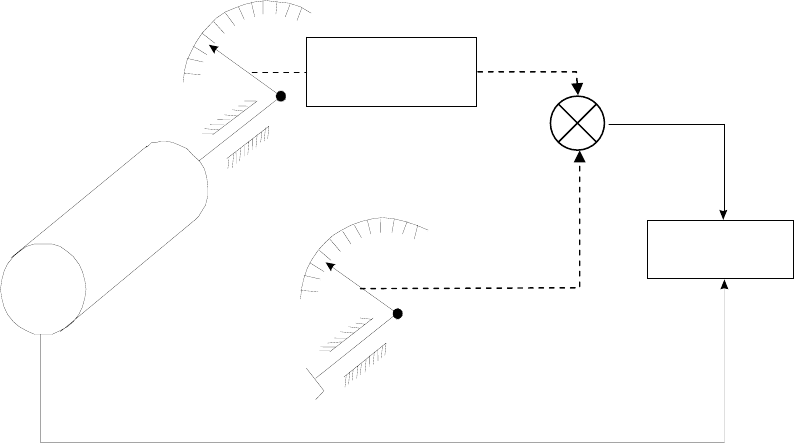
В качестве примера следящей системы рассмотрим автома-
тическое управление углом поворота вала, который может быть
связан, например, с направленной антенной для приема спутнико-
вых сигналов, рулевым механизмом летательного аппарата или ва-
лом прокатного стана. Следящий вал приводится
во вращение элек-
тродвигателем (ДВ) постоянного тока (рис. 6).
Напряжение
()
tu , подводимое к двигателю, пропорционально
рассогласованию
() () ()
tgtxte =-
между заданным углом поворо-
та
()
gt
и действительным угловым положением
(
)
xt
вала двигате-
ля.
Назначение такой системы заключается в обеспечении ми-
нимума рассогласования
(
)
te . На рис. 7 представлена эквивалент-
ная схема такой следящей системы.
Измерительное
устройство
Усилитель
Рис. 6
ДВ
(
)
tg
()
tu
()
x
t
()
te
–
+

12
Рис.7
Для того, чтобы дать математическое описание системы, не-
обходимо установить связь между углом
(
)
xt поворота вала двига-
теля и напряжением
()
ut. Если не учитывать инерционность двига-
теля, то можно приблизительно полагать, что скорость вращения
()
tΩ пропорциональна
(
)
ut, т. е.
(
)
(
)
дв
tKUt
Ω
= . Поскольку
() ()
tdxtdtΩ= , то связь между напряжением и углом поворота за-
пишется в виде
() ()
t
дв
0
xt K utdt=
∫
.
Таким образом, электродвигатель рассмотренной системы
может быть приближенно заменен интегрирующим звеном.
1.2. ЛИНЕЙНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
В этом разделе рассматривается важнейший класс систем
управления – линейные системы. Центральное место, которое за-
нимают линейные системы в теории управления, обусловлено тре-
мя основными причинами. Во-первых, многие реальные системы
управления хорошо описываются линейными
моделями. Во-
вторых, именно для линейных систем разработаны сравнительно
простые математические методы анализа. Основой для исследова-
ния нелинейных систем управления служит математический аппа-
рат теории линейных систем.
Вначале обсуждается классификация систем управления и
выделяется класс линейных систем. Затем рассматриваются основ-
ные математические методы анализа линейных систем.
g(t)
ε
(t) u(t) x (t)
Усилитель
Двигатель
+
–
13
Классификация систем управления
Основным типом являются замкнутые системы управления,
которые можно представить в виде структурной схемы, приведен-
ной на рис. 5.
Система управления содержит управляющую подсистему или
объект управления (ОУ), устройство управления (УУ) и схему
сравнения входного сигнала
(
)
gt и выходного сигнала
()
xt. При
этом заданная функция времени
(
)
gt определяет требуемое изме-
нение выходного сигнала
(
)
xt системы управления. В схеме срав-
нения вычисляется рассогласование
(
)
(
)()
tgtxt
ε
=
−
, возникаю-
щее в процессе управления. Устройство управления предназначено
для выработки сигналов управления
(
)
Ut.
Математическая модель любой из систем управления вклю-
чает в себя описание входных и выходных сигналов и вид преобра-
зования входных сигналов
(
)
gt в выходные сигналы
()
xt. Всю со-
вокупность этих преобразований можно представить с помощью
оператора
A
:
(
)()
xt Agt= . Как следует из этой формулы, класси-
фикация систем управления может быть основана либо на свойст-
вах входных и выходных сигналов, либо на свойствах оператора
A
.
Остановимся вначале на классификации систем управления
по виду входных и выходных сигналов.
Системы управления, имеющие один вход и один выход, на-
зывают одномерными. Системы, имеющие несколько входов или
выходов, называют многомерными.
Системы управления называют непрерывными, если вход-
ные и выходные сигналы имеют непрерывное множество значений
по времени. Если сигналы
поступают в дискретные моменты вре-
мени, то такие системы называют дискретными или импульсны-
ми.
Дискретные системы управления с конечным числом уровней
сигналов называют цифровыми.
Представим реализации сигналов систем различных типов в
виде графиков. На рис. 8,а изображен характерный вид сигнала
в непрерывной системе. На рис. 8,б представлен характерный вид
сигнала в дискретной или импульсной системе. На рис. 9 – в циф-
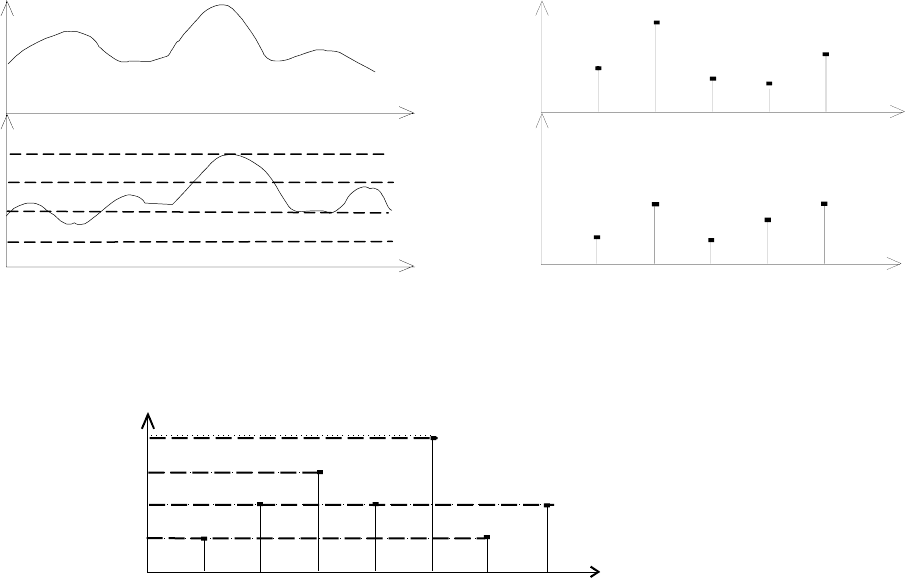
14
ровой. Заметим, что все системы, построенные на базе ЭВМ, явля-
ются цифровыми.
Теперь остановимся на классификации систем управления,
основанной на свойствах оператора
A
.
Систему называют стационарной, если вид и свойства опе-
ратора
A
не изменяются во времени. Если же свойства оператора
A
изменяются во времени, то систему называют нестационарной.
Стационарность означает, что вид выходного сигнала системы
не зависит от сдвига по времени входного сигнала.
Системы управления называют линейными, если выполня-
ются принцип суперпозиции. Если этот принцип несправедлив, то
систему называют нелинейной.
Сущность принципа суперпозиции заключается в том, что
линейной комбинации произвольных
входных сигналов
)(,),(),(
21
tgtgtg
N
K
соответствует линейная комбинация соответст-
вующих выходных сигналов:
()
()
11
()
==
жц
ч
з
=
ч
з
ч
ч
з
иш
ее
NN
kk k k
kk
A
ag t aAg t .
3
2
1
а
g(t)
t
t
х(t)
0
Рис. 8
Рис. 9
t
1
t
2
t
3
t
4
t
5
t
6
t
7
t
g(t)
t
1
t
2
t
3
... t
n
t
t
1
t
2
t
3
... t
n
t
б
g(t)
0
х(t)
0
t
t
3
2
1
0

15
Принцип суперпозиции всегда выполняется, если выполня-
ются следующие два условия:
1) при суммировании любых двух входных сигналов соответст-
вующие выходные сигналы суммируются;
2) при любом увеличении (уменьшении) входного сигнала без
изменения его формы выходной сигнал увеличивается (уменьшает-
ся) во столько же раз, также не изменяя своей формы.
Оператор
A
, соответствующий линейной системе, называют
линейным оператором. Примерами линейных операторов могут
служить операторы дифференцирования или интегрирования:
()
(
)
x t dg t dt= ,
()
()
o
t
t
xt gtdt=
∫
.
Математическое описание линейных систем управления
Существует два основных, тесно связанных между собой, ме-
тода анализа линейных систем. Это анализ систем во временной
области и анализ систем в частотной области. Рассмотрим вначале
метод анализа систем во временной области. Для этого вспомним
определение и свойства импульсной
δ
-функции Дирака. В частно-
сти,
()
1tdt
δ
∞
−∞
=
∫
,
() ( ) ()
f
tdft
τδ τ τ
∞
−∞
−=
∫
. Запишем второе из этих
свойств
δ
- функции в виде:
() ( ) ( )
gt g t d
τ
δττ
∞
−∞
=−
∫
. Тогда вы-
ходной сигнал линейной системы можно представить следующим
образом:
() () ( ) ( ) ( ) ( )
xt Agt A g t d g A t d
τ
δττ τδττ
∞∞
−∞ −∞
== −= −
∫∫
.
Введем функцию
(
)
(
)
ht A t
δ
=
, которая представляет собой
выходной сигнал системы управления при входном сигнале в виде
δ
-функции. Функция
()
ht называется импульсной переходной ха-
рактеристикой
системы или весовой функцией. Тогда выходной
сигнал линейной системы при любом входном воздействии опреде-
ляется по формуле:

16
()()
()xt ht g d
τ
ττ
∞
−∞
=−
∫
.
Эта формула называется
интегралом Дюамеля или инте-
гралом свертки
. Ее смысл заключается в том, что выходной сигнал
любой линейной системы получается с помощью взвешивания и
последующего интегрирования входного сигнала
()
gt с весовой
функцией
()
ht
τ
− .
Наиболее прост анализ линейных систем управления в час-
тотной области. Действительно, обозначим преобразование Лапла-
са от
()
xt, через
()
xp, т. е.
(
)
(
)
xt x p
÷
; соответственно
() ( )
ht H p÷ ;
() ( )
gt g p
÷
. Учитывая свойство преобразования Лап-
ласа свертки функций, получаем
()
(
)
(
)
xp Hpgp
=
.
Если в этом равенстве положить
pj
ω
= , то
() ()
(
)
xj Hj gj
ω
ωω
= , где
(
)
xj
ω
,
(
)
H
j
ω
,
(
)
gj
ω
– преобразова-
ния Фурье выходного сигнала линейной системы, импульсной пе-
реходной характеристики и входного сигнала соответственно.
Функция
(
)
H
p или
(
)
H
j
ω
, играющая центральную роль в
анализе систем, называется
передаточной функцией системы
управления. Эта комплексная функция действительного аргумента
– частоты
ω
. Ее модуль
(
)
H
j
ω
называется амплитудно-
частотной характеристикой
(АЧХ) системы; аргумент
()
()
A
rg H j
ω
– фазочастотной характеристикой (ФЧХ). Для
анализа систем управления часто применяются логарифмические
амплитудно-частотные характеристики (ЛАХ):
()
(
)
20lgLHj
ω
ω
= .
Итак, если известна передаточная функция
()
H
p линейной
системы, то задача определения выходного сигнала по входному
решается с помощью простого умножения
(
)()()
xp Hpgp
=
. Ка-
ким же образом можно найти
(
)
H
p ?
Очень широкий класс линейных систем управления описыва-
ется с помощью линейных дифференциальных уравнений:

17
()
(
)
()
(
) ()
()
11
101
11
nn mm
nm
nn mm
dxt d xt dgt d gt
aaxtbb b
g
t
dt dt dt at
−−
−−
+++=+ ++KK
.
Преобразуем левую и правую часть этого уравнения по Лап-
ласу и получим следующее выражение
()
()
(
)
()
11
101
... ...
nn mm
nm
xp p ap a bp bp b gp
−−
+++=+++
или
() ()()
xp Hpgp= , где
()
1
01
1
1
mm
m
nn
n
bp bp b
Hp
pap a
−
−
+
++
=
+++
K
K
– переда-
точная функция системы управления.
Таким образом, при заданном описании системы в виде диф-
ференциального уравнения передаточная функция находится очень
просто и, следовательно, легко осуществляется анализ линейных
систем.
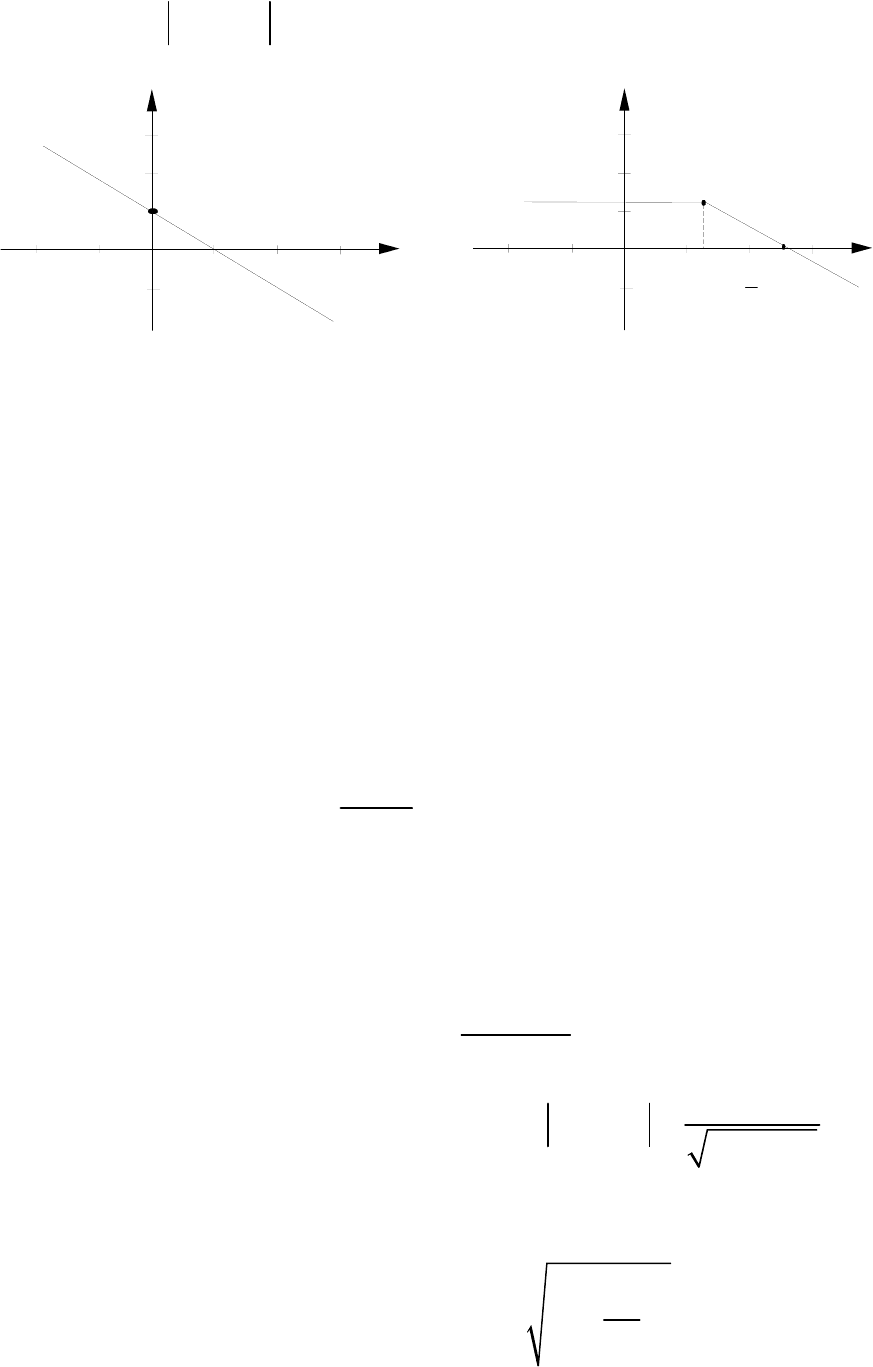
Типовые звенья систем управления
Рассмотрим примеры построения частотных характеристик
трех звеньев, которые встречаются во многих системах автоматиче-
ского управления.
1. Интегрирующее звено
Предположим, что выходной сигнал звена системы управле-
ния определяется как интеграл
() ()
∫
=
t
dttgktx
0
от входного сигнала
(
)
gt, где 0k > – постоянный коэффициент.
После преобразования Лапласа получим
() ()
k
xp gp
p
=
.
Таким образом, передаточная функция интегрирующего зве-
на запишется в виде
()
k
Hp
p
=
. Амплитудно-частотная характери-
стика
()
kk
Hj
j
ω
ω
ω
==, а ФЧХ –
()
2
ArgH j
π
ω
=
−
. Для построе-
ния графика ЛАХ по оси ординат откладывают
18
() ( )
20lg 20lg 20lgLHjk
ω
ωω
==− в децибелах, а по оси абсцисс
откладывают частоту
ω
в логарифмическом масштабе (рис. 10, а).
При этом отрезок оси абсцисс, длина которого соответствует
десятикратному изменению частоты
ω
, называется декадой. В та-
ком масштабе ЛАХ интегрирующего звена будет представлена
прямой линией, наклон которой составляет –20 децибел на декаду.
Примером интегрирующего звена служит исполнительный двига-
тель следящей системы (рис. 6).
2. Апериодическое звено
Апериодическим называют звено, описываемое следующим
дифференциальным уравнением
()
() ()
dx t
TxtkUt
dt
+= ,
где
T – постоянная времени апериодического звена. Простым при-
мером такого звена может служить интегрирующая RC цепь. Пре-
образуя дифференциальное уравнение по Лапласу, находим переда-
точную функцию апериодического звена
()
()
1
k
Hp
pT
=
+
.
Для апериодического звена АЧХ
()
22
1
k
Hj
T
ω
ω
=
+
, а ФЧХ
() ()
A
rg H j arctg T
ω
ω
=− . Рассмотрим выражение для ЛАХ, пред-
ставленное в виде
()
2
20lg 20lg 1
c
Lk
ω
ω
ω
⎛⎞
=− +
⎜⎟
⎝⎠
,
L(ω)
20lgK
40
20
-20
10 100 1000 0,1 0,01
60
L(
ω
)
20lgK
40
20
-20
10
1000
ω
ω
0,10,01
60
а)
б)
ω
c
T
=
1
Рис. 10

19
где
1
c
T
ω
= .
Такая ЛАХ может быть приближенно представлена ломаной
линией, показанной на рис. 10, б. Эта приближенная характеристи-
ка составлена из двух асимптот, к которым стремится ЛАХ при
0
ω
→ и
ω
→∞. Действительно, при малых
ω
отношение
2
1
c
ω
ω
⎛⎞
<<
⎜⎟
⎝⎠
и
()
20lgLk
ω
≅ . При
2
1
c
ω
ω
⎛⎞
>>
⎜⎟
⎝⎠
()
20lg 20lg
c
Lk
ω
ω
ω
≅−
,
то есть характеристика представляет собой прямую, имеющую на-
клон –20 децибел на декаду. Обе асимптоты пересекаются в точке
c
ω
ω
= ; поэтому
c
ω
называется сопрягающей частотой.
3. Дифференцирующее звено
Связь между выходным и входным сигналами идеального
дифференцирующего звена определяется соотношением
()
(
)
dg t
xt k
dt
= .
Легко убедиться, что передаточная функция
()
H
pkp= , АЧХ
()
H
jk
ω
ω
= , ФЧХ
(
)
/2ArgH j
ω
π
=
. Логарифмическая АЧХ
()
20lgLk
ω
ω
= может быть представлена на графике прямой лини-
ей, имеющей наклон к оси абсцисс 20
+
децибел на декаду.
Примером близкого к идеальному дифференцирующего звена
является тахогенератор (датчик частоты вращения вала), выходное
напряжение которого
(
)
T
Ut пропорционально частоте вращения
()
tΩ его якоря, то есть
(
)
(
)
T
Ut k t
=
Ω . Если в качестве входной ве-
личины рассматривать не скорость вращения, а угол поворота
(
)
t
ϕ
его якоря, то
()
(
)
T
dt
Ut k
dt
ϕ
= .
Передаточные функции систем управления с обратной связью
Предположим, что некоторая линейная система состоит из
двух последовательно соединенных подсистем, имеющих переда-
точные функции
()
1
H
p и
(
)
2
H
p (рис. 11).

20
Очевидно,
()
(
)
(
)
(
)
(
)()
21 2 1
Xp HpGp HpHpGp== . Таким
образом, при последовательном соединении линейных систем их
передаточные функции перемножаются.
g (p) g
1
(p) x (p)
Рис. 11
При параллельном соединении систем (рис. 12) их переда-
точные функции складываются:
(
)
(
)
(
)
(
)
()
12
Xp H p H pGp=+ .
g (p) x (p)
Рис. 12
Рассмотрим теперь систему с обратной связью (рис. 13).
Передаточная функция
(
)
H
p называется передаточной
функцией разомкнутой системы управления
. Действительно,
разрывая цепь главной обратной связи, получим
() ()()
Xp HpGp= . Найдем передаточную функцию замкнутой
системы из следующих соотношений:
(
)()
(
)
Xp Hp p
ε
= ,
() () ()
pGpXpΕ= − . После подстановки получаем:
() ()() ()
(
)
Xp HpGp HpXp=− или
()
() ()
1()
Hp
Xp Gp
Hp
=
+
.
g (p)
ε (p) х (р)
Рис. 13
+
-
Н (р)
H
1
(p)
H
2
(p)
)p(g)p(H
1
)p(g)p(H
2
H
1
(p)
H
2
(p)