Туранов Х.Т., Корнеев М.В. Транспортно-грузовые системы на железнодорожном транспорте
Подождите немного. Документ загружается.

290
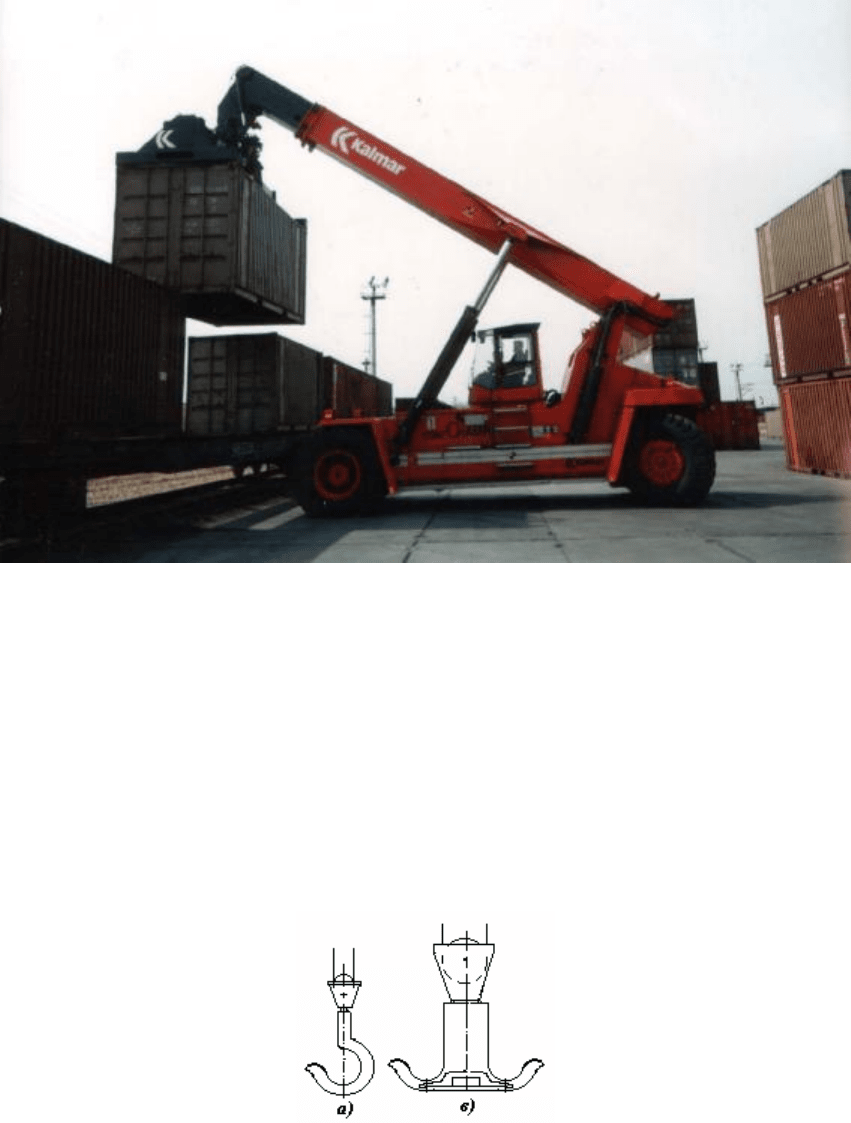
Рис. 3.14. Автопогрузчик типа «Kalmar»
10.6. Грузозахватные приспособления ПРМ прерывного действия
Эффективность и продолжительность работы кранового оборудования при
выполнении погрузочно-разгрузочных работ и складских операций зависит от
выбора типа захватного приспособления, которое подвешивается или непо-
средственно на крюк грузоподъёмной машины, или на крюковую обойму.
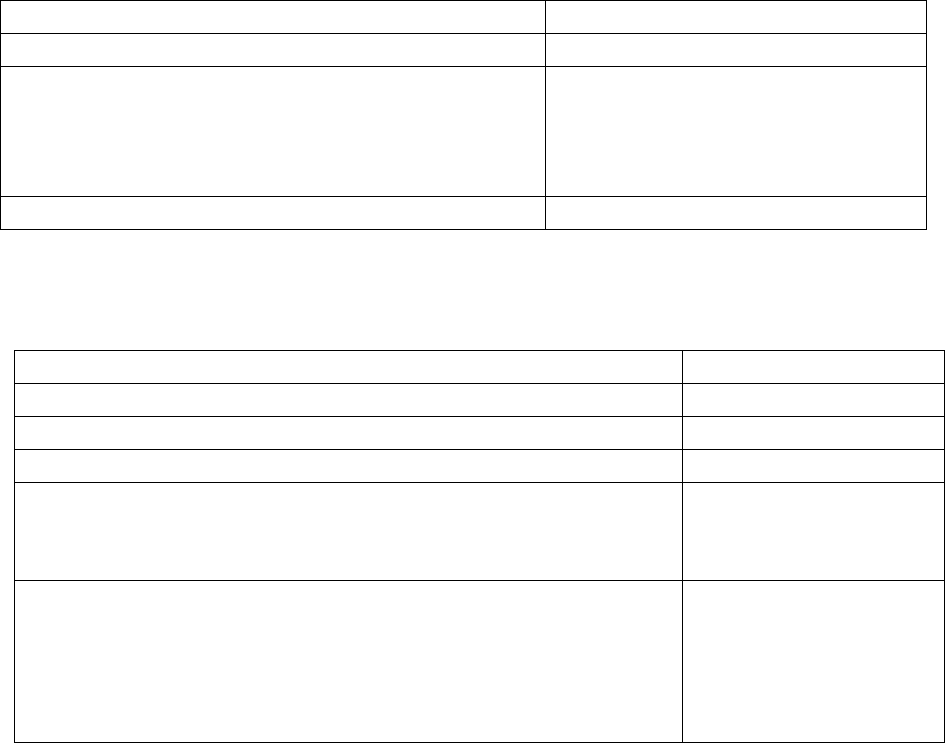
Крюки применяются однорогие (рис.10.8,а) и двурогие (рис.10.8,б) в зави-
симости от типа груза.
Рис. 10.8. Однорогие (а) и двурогие (в) крюки
10.6.1. Грузозахватные приспособления для штучных грузов
В качестве грузозахватного приспособления для штучных грузов приме-
няются стропы.
Стропы являются наиболее распространёнными и простыми по конструк-
ции грузозахватными устройствами (рис. 10.9). Они изготавливаются из сталь-

291
ных канатов и разделяются на универсальные облегчённые с коушами, одно-
ветвевые с коушом на одном конце и крюком на другом и многоветвевые
(двух-, четырёх-, шестиветвевые).
Рис. 10.9. Петлевой (а) и четырёхветвевые (в) стропы с коушем
на одном конце и крюками на другом:
1 − коуш, 2 − петлевой трос, 3 − крюки
Петлевые тросы применяют для застропки грузов, не имеющих грузовых
петель (проушин).
При перегрузке длинных, громоздких и тяжёлых грузов применяют тра-
версы в сочетании со стропами (рис. 10.10), клещами, электромагнитами, ваку-
умными захватами и крюками, что позволяет избежать вредного влияния на-
клонных ветвей стропов; уменьшить расстояние между крюком подъёмного
механизма и грузом; объединить отдельные грузы (бочки, ящики, кипы, грузо-
шины, бунты проволоки и др.) для одновременного их подъёма с целью лучше-
го использования грузоподъёмности кранов.
Захват для листовой стали размерами 2150х4000х280 мм показан на рис.
10.11. Грузоподъёмность захвата 100 кН (10 тс). Собственный вес захвата − 2.9
кН (0.29 тс).
Рис. 10.10. Траверсы в сочетании со стропами:
1 − траверса, 2 − грузонесущий трос, 3 − петлевой трос,
4 − длинномерный груз

292
Рис. 10.11. Захват для листовой стали размерами 2150х4000 мм
10.6.2. Грейферы для насыпных грузов и лесоматериалов
Грейферы обеспечивают зачерпывание и освобождение порции груза соот-
ветственно при замыкании и размыкании рабочего органа – челюстей. Вмести-
мость грейферов колеблется от 0.4 до 10 м
3
.
Сфера применения: применяются на кранах и других машинах для захвата
и перемещения насыпных и кусковых грузов.
Различают грейферы одноканатные, применяемые на кранах с однобара-
банной лебёдкой, и двухканатные, применяемые на кранах с двухбарабанной
лебёдкой. Наиболее распространены грейферы двухчелюстные двухканатные.
У одноканатных грейферов подъём или спуск и закрывание челюстей осу-
ществляются одним грузовым канатом. Одноканатные съёмные грейферы по-
зволяют использовать кран для работы с крюком и грейфером. У двухканатных
грейферов одна группа канатов 6 служит для их удержания, а другая 5 – для
размыкания и замыкания челюстей (рис. 10.12).
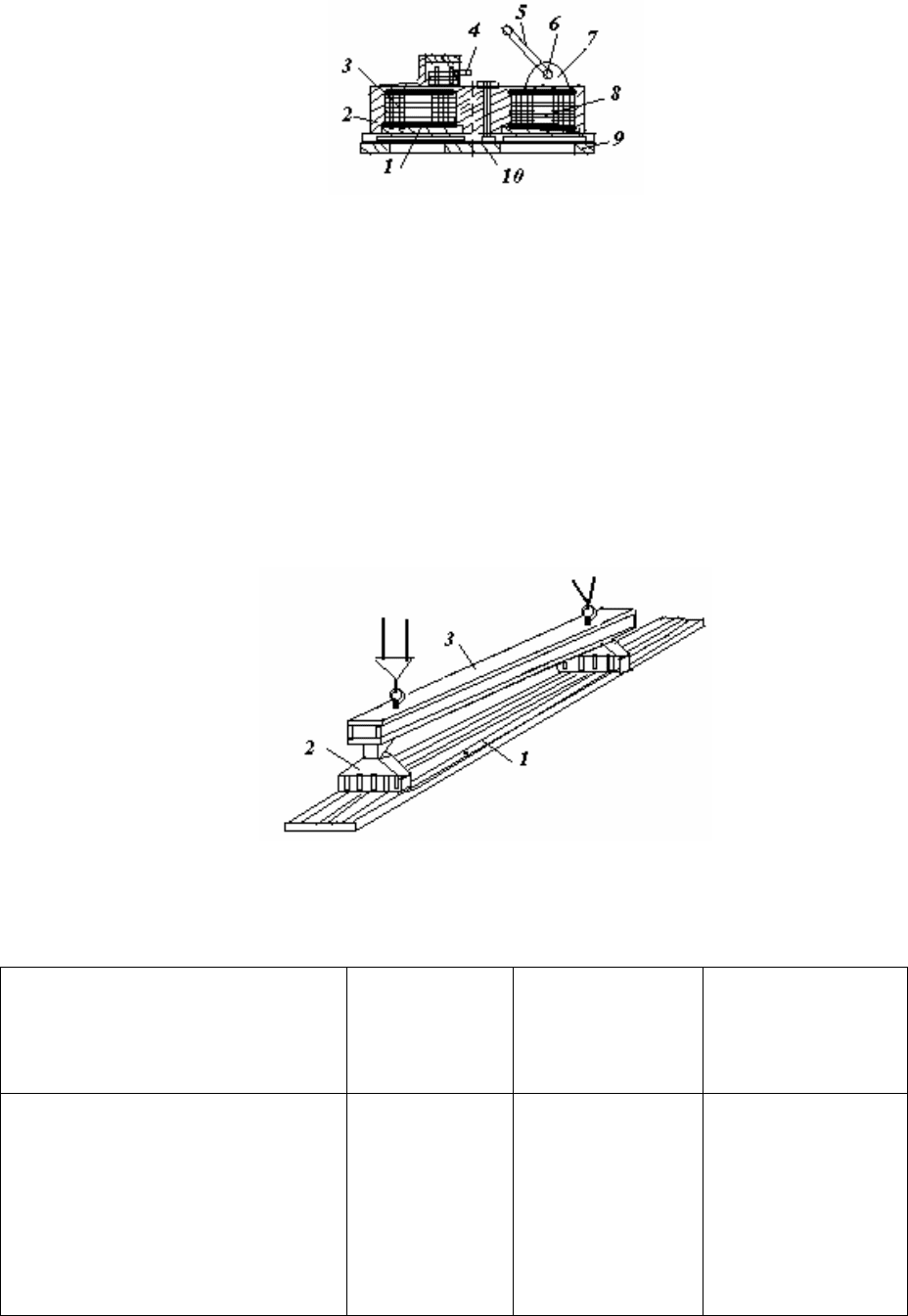
Рис. 10.12. Двухканатный двухчелюстный грейфер:
1 − челюсти, 2 − нижний шарнир, 3 − тяги (4 шт.),
4 − головка (обойма), 5 − канат замыкания и размыкания грейфера,
6 − грузовой канат, 7 − грузовой барабан, 8 − грейферный барабан
293
Имеются двухчелюстные двух-, трёх- и четырёхканатные грейферы обще-
го назначения, а также моторный и вибрационный грейферы.
На выбор типа грейфера влияют: физические свойства и характеристика
перегружаемого груза (кусковатость и размер кусков, влажность, слеживае-
мость, угол естественного откоса, объёмная масса); часовая производитель-
ность грейферной установки; основные параметры, характеризующие условия
работы грейферной установки (отдалённость места захвата груза от места его
выгрузки, размеры обслуживаемой площади, максимальная высота подъёма
грейфера и т.п.).
Двухчелюстные двух-, трёх- и четырёхканатные грейферы общего назна-
чения применяются в качестве грузозахватных органов к кранам грузоподъём-
ностью от 20 до 320 кН (от 2 до 32 тс). Они предназначены для перемещения
насыпных и кусковых грузов с объёмным весом от 0.7 до 3.2 т/м
3
.
Грейфер моторный МГС-504 предназначен для захвата и перемещения на-
сыпных грузов.
Вибрационный грейфер представляет собой двухчелюстный механизм с
электрогидравлическим приводом замыкания челюстей. На каждой челюсти ус-
тановлен электровибратор, увеличивающий зачерпывающие способности
грейфера. Демпфирующая подвеска челюстей грейфера к корпусу предохраняет
привод замыкания от вибрационного воздействия. Управление грейфером осу-
ществляется из кабины крановщика.
Технико-эксплуатационные характеристики двухчелюстных двухканатных
грейферов для переработки насыпных грузов приведены в табл. 10.10.
Технико-эксплуатационные характеристики двухчелюстных четырёхка-
натных грейферов для переработки насыпных и кусковых грузов приведены в
табл. 10.11.
Таблица 10.11
Тип грейфера и
грузоподъём-
ность (г.-п.)
крана, кН
Род груза
Вмести-
мость
грей-
фера,
м
3
Вес
груза,
кН
Вес
грей-
фера,
кНс
Оптовая
цена
(ориен-
тировоч-
ные, тыс.
руб
1 2 3 4 5 6
Тип 1693 для
передвижных
кранов г.-п.
50 кН
уголь
2.5
26.5
22.5
54.25
Тип 3627 для
передвижных
кранов г.-п.
50 кН
уголь
1.5
15
12.5
42.75
294
Продолжение таблицы 10.11
1 2 3 4 5 6
Тип 2904 для
передвижных
кранов г.-п.
20..30 кН
насыпные
(песок,
гравий, ще-
бень)
0.8
10.6
10.9
41.75
Тип Н-18-3 к
кранам КДЭ-151
г.п.15 тс, КДЭ-
161 г.-п. 160 кН
насыпные
(песок,
гравий, ще-
бень)
2.0
10
17.2
55
Таблица 10.12
Тип грейфера и
грузоподъём-
ность (г.п.) крана,
кН
Род груза
Вмести-
мость
грей-
фера, м
3
Вес
груза,
кН
Вес грей-
фера, тс
Опто-
вая цена,
тыс. р.
Тип 22964-ЛА для
передвижных
кранов г.п. 30 кН
Крупнокус-
ковые и на-
сыпные гру-
зы
1.0
12
1.6
33
Технико-эксплуатационные характеристики грейфер моторного МГС-504,
предназначенного для захвата и перемещения насыпных грузов, приведены в
табл. 10.13.
Таблица 10.13
Тип грейфера и
грузоподъем-
ность (г.п.) крана,
кН
Род
груза
Вмести-
мость
грейфера,
м
3
Вес
груза,
кН
Вес
грейфера,
кН
Оптовая
цена,
тыс.р.
Тип МГС-504 насып-
ные
грузы
1.5
16
27.1
54
Технико-эксплуатационные характеристики грейфера для круглого леса
приведены в табл. 10.14.
Таблица 10.14
Параметры и размеры Для кранов КДЭ-161
и КДЭ-251,
тип грейфера Н-18-3
Грузоподъёмность крана, кН 160
Вес захватываемого груза, кН 45
295
Продолжение таблицы 10.14
1 2
Вес грейфера, кН 18.7
Габаритные размеры, мм
длина закрытого грейфера
ширина грейфера
высота закрытого грейфера
1500
2780
3210
Оптовая цена, тыс. р. 55
Технико-эксплуатационные характеристики вибрационного грейфера при-
ведены в табл. 10.15.
Таблица 10.15
Параметры и размеры Параметры
Вместимость, м
3
3,5
Вес захваченного груза, кН 70
Вес грейфера, кН 30
Время закрытия челюстей на холостом ходу, с
Время открытия челюстей, с
16
12
Габаритные размеры, мм
длина открытого грейфера
длина закрытого грейфера
ширина челюстей
высота челюстей
2500
2000
2600
2000
10.6.3. Грузозахватные приспособления для металлопродукции.
Подъёмные электромагниты
Сфера применения: для перемещения, погрузки в подвижной состав и вы-
грузки из него различными кранами грузов, обладающих магнитопроницаемы-
ми свойствами, например, металлопродукции (прутков, рельсов, балок, чугун-
ных чушек, листового металла, металлических болванок, стальных стружек и
др.). Захват груза происходит за счёт притяжения его к корпусу электромагнита
при подаче электрического тока в катушку последнего. При отключении тока
происходит освобождение груза. Электромагниты бывают круглой (типа М) и
прямоугольной форм (типа ПМ) грузоподъёмностью от 6 до 30 тс (от 60 до 300
кН).
Схематически электромагнит круглой формы типа М представлен на рис.
10.13.
Основные грузы, с которыми работают электромагнитами круглой формы,
металлические заготовки и плиты, чугун в чушках, стальная стружка и др.
Для работы с длинномерными грузами (профильный и круглый прокат,
трубы, рельсы и т.п.) используются прямоугольные электромагниты, принци-
пиальное устройство которых подобно круглым электромагнитам (рис. 10.14).
296
При работе с длинномерными более 4…5 м эти электромагниты используют в
сочетании с траверсами.
Рис. 10.13. Электромагнит круглой формы типа М:
1 – упорная шайба из немагнитных материалов; 2 – корпус электромагни-
та; 3 – катушка электромагнита; 4 – наружный кабель для подвода тока
к обмоткам катушки; 5 – цепи; 6 – пальцы для закрепления трёх цепей,
другие концы которых надеты на общее кольцо; 7 – проушины корпуса
для закрепления пальцев 6; 8 – изолирующая прокладка;
9 и 10 – кольцевой и цилиндрически полюсные наконечники
Для работы железнодорожных кранов КДЭ-161, КДЭ-251 и др. с грузовым
магнитом на них монтируется дополнительное оборудование (вес комплекта
258 кН (2.58 тс) и оптовая цена – 184 тыс. р.), основные технические характе-
ристики которого приведены в табл. 10.16.
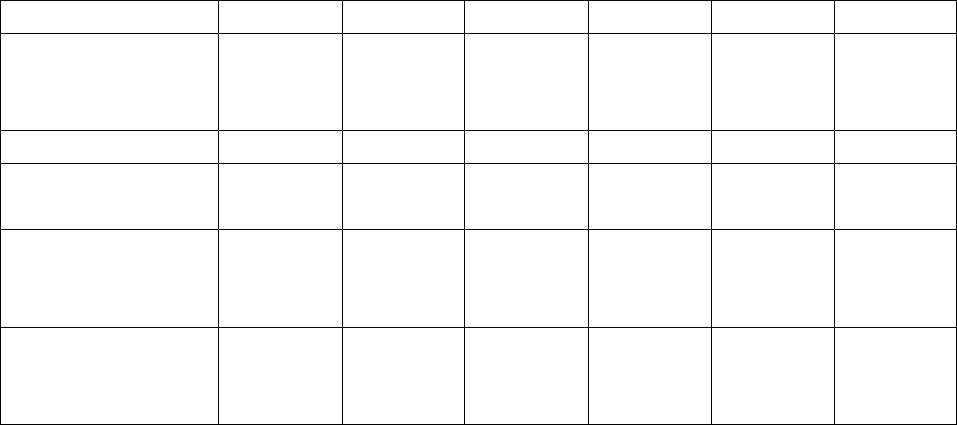
Рис. 10.14. Прямоугольные электромагниты в сочетании с траверсой:
1 – металлопродукция, 2 – прямоугольный электромагнит, 3 – траверса
Таблица 10.16
Грузовой электромагнит
М-21, М-22,
М 22Б,
ПМ-15
М-41, М-42,
М 42Б, ПМ-
20, ПМ-25,
ПМ-25А
М-61, М-62,
М-62А, М-62Б
Максимальная
грузоподъёмность, тс
Потребляемая мощность,
кВт
Вес электромагнита, кН
Время нарастания магнит-
ного тока, с
меньше 10
4.4…7.15
5.5…15.5
2.5…3.0
10…20
4.4…7.15
15…30
4.0
20…30
12.5
35…55
10…12
297
Для работы железнодорожных кранов в качестве грузозахватных приспо-
соблений также используются электрические аппараты с постоянными магни-
тами, основные технические характеристики которых приведены в табл. 10.17.
Таблица 10.17
Параметр МПГ-01
МПГ-02
МПГ-03
МПГ-04
МПГ-1 МПГ-2
Максимальное
отрывное
усилие, кН
0.25
0.5
1.0
2.0
4.0
12.5
Вес, кН 6.25 12.5 25 50 100 300
Потребляемая
энергия, кВТ
0.0015
0.003
0.005
0.010
0.018
0.022
Амплитуда
намагничивания
импульса, А
0.75
2
3
6
10
15
Длительность
намагничивания
импульса, с
10⋅10
-3
15⋅10
-3
30⋅10
-3
40⋅10
-3
55⋅10
-3
65⋅10
-3
10.6.4. Грузозахватные приспособления
для среднетоннажных контейнеров
Известно, что среднетоннажные контейнеры массой брутто 30 и 50 кН (3 и
5 тс) оборудованы типовыми грузоподъёмными устройствами в виде утоплен-
ных в крышах контейнеров рымов. Для застропки и отстропки этих контейне-
ров применяется автостроп конструкции ЦНИИ-ХИИТ с поворотной головкой
(рис. 10.15).
Автостроп подвешивается вместо крюковой обоймы к козловому крану.
Основными узлами автостропа являются: рама 5, две передвижные каретки 6 с
захватными органами 4, привод перемещения кареток 9, который является од-
новременно и приводом механизма наводки.
Привод передвижения кареток 9 смонтирован в средней части рамы и со-
стоит из электродвигателя, промежуточного вала с муфтой предельного момен-
та и двухступенчатой цепной передачи. Цепная передача передаёт вращение на
ходовой винт 10. С одной стороны винт имеет левую ходовую резьбу, а с дру-
гой – правую и связан с гайками, которые смонтированы на каретках. Это обес-
печивает при определённом направлении вращения винта движение кареток
навстречу друг другу или друг от друга. Под приводом 9 размещены опорные
дужки 11, которыми автостроп устанавливают на крышу контейнера.
По концам кареток на консолях закреплены захватные органы, каждый из
которых состоит из блока перемещающихся в вертикальных направлениях че-
тырёх подпружиненных крюков 4, которые обращены зевами наружу от центра
автостропа.
298
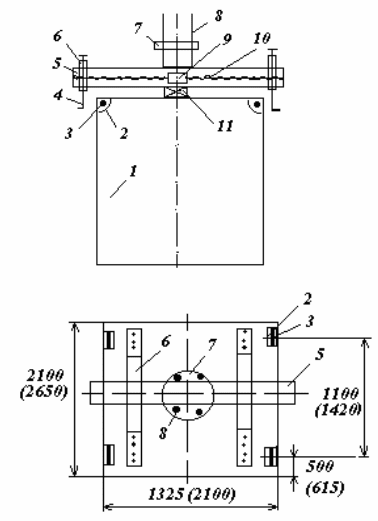
Рис. 10.15. Автостроп конструкции ЦНИИ-ХИИТ:
1 – контейнер, 2 – выемка (паз) шириной 120 мм, 3 – рым ∅28 мм,
4 – грузозахватные кулачки, 5 – рама, 6 – две подвижные каретки,
7 – поворотная головка с приводом (электродвигатель и редуктор),
8 – грузоподъёмный трос, 9 – привод механизма передвижения
кареток (электродвигатель и редуктор), 10 – ходовой винт,
имеющий правую и левую резьбы, 11 – опорные дужки
Примечание. Размеры, указанные на рис. 15 в скобках, относятся к контейнерам
УУК-5.
Три крюка, расположенных ближе к его продольной оси, предназначены
для застропки контейнеров массой брутто 30 кН, а один крайний – для контей-
неров массой брутто 50 кН. Грузозахватный орган закрепляется на поворотной
головке 8 с гидравлическим демпфером гашения колебаний.
Автостроп снабжён автоматической блокировкой, которая исключает не-
правильную застропку контейнера, а также подъём ненадёжно застропленного
контейнера и отцепку его на весу.
Для быстрой замены одного грузозахватного приспособления другим, ко-
торый входит в набор захватов для крана (автостроп, магнитная плита, челю-
стный захват для леса), разработаны универсальные обоймы с поворотной го-
ловкой для кранов грузоподъёмностью 50…100 кН.
Цикл работы контейнерного козлового крана с универсальной обоймой и
автостропом ЦНИИ-ХИИТ состоит из следующих операций:
− передвижение крана и тележки в сторону контейнера;
− опускание автостропа и его наведение на контейнер с помощью кнопок
на пульте управления, который находится в кабине машиниста. При этом для
ориентации автостропа относительно контейнера используются козырьки;
299
− раздвижка рабочих органов автостропа и застропка контейнера;
− подъём контейнера и перемещение его краном и тележкой в полувагон
или на контейнерную площадку.
Технические характеристики автостропа приведены в табл. 10.18.
Таблица 10.18
Грузоподъёмность, тс 5
1 2
Расстояние между захватами, мм
минимальное
максимальное
720
1940
Время застропки и отстропки (с наводкой) контейнера, с 13.2
Количество захватов, шт. 16
Тип двигателя АОЛ-22-4
Мощность электропривода, кВт 1.5
Частота вращения, об/мин 1400
Габариты, мм
высота от крыши контейнера до верхней точки поворот-
ной головки
длина
ширина
1220
1800
1520
Вес, кН 4.2
10.6.5. Грузозахватные приспособления
для крупнотоннажных контейнеров
Известно, что крупнотоннажные контейнеры массой брутто 100, 200, 240,
30 кН (10, 20, 24 и 30 тс) оборудованы типовыми грузоподъёмными устройст-
вами в виде верхних и нижних фитингов (см. рис. 3.3). Для застропки и от-
стропки этих контейнеров применяется спредер жёсткой конструкции
ВНИИПТМаш, состоящий из трёх основных узлов: нижнего 3 и промежуточно-
го 2 захватов, которые выполнены в виде пространственной рамы и блоковой
рамы 1 с механизмами вращения (рис. 10.16).
В угловые коробки 5 вмонтированы приводные штыревые замки в виде фа-
сонных поворотных кулачков. При захвате контейнера кулачки наводятся и опус-
каются в его овальные отверстия. Замыкание контейнера и кулачков производится
поворотом этих кулачков на 90
°
. Нижний захват предназначен для работы с 20-
тонными (200 кН) контейнерами, а промежуточный – с 10-тонными (100 кН).
Спредер оборудован приводными от гидроцилиндров центрирующими ла-
пами 4, обеспечивающими его точное ориентирование по всем четырём стен-
кам контейнера. На блоковой раме 1 по углам установлены четыре блока 6, че-
рез которые перекинуты ветви 7 пространственного полиспаста механизма
подъёма груза.