Тесленко О.А. Методы оптимизации. Практикум
Подождите немного. Документ загружается.

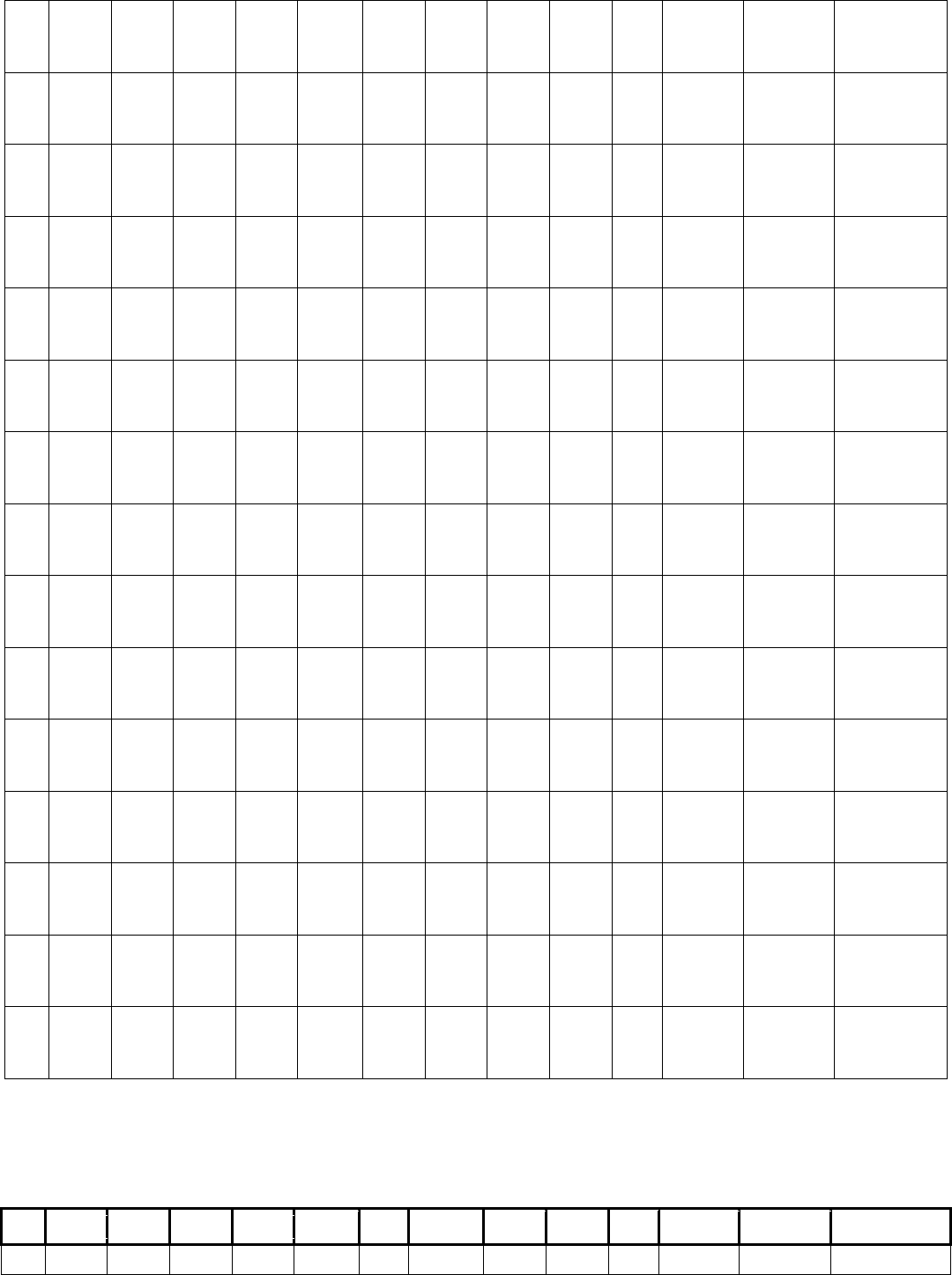
Таблица исходных данных группы А-25
№
в
ар.
ФИО
З
адача
m T
2
/g ì ñ
max
( )F t
H
3
/ì ñ êã
Í êì
/V ì ñ
0
H
T
H
0
V
T
V
1.
Авдж
ан А.Г.
I 1
.2
4.5 3
0∙10
3
0.2 5
0
- -
20
-
2.
Бокар
ев А.А
I
I
1
.4
4.0 1
6∙10
3
0.5 2
5
2
00
3.
Бурма
тов А.
I
II
1
.6
3.0 3
5∙10
3
0.18 4
0
4
00
4.
Бухто
яров В
I
II
1
.8
3.5 2
5∙10
3
0.3 1
5
1
30
1
10
5.
Быков
С.А.
I
II
2
.0
2.5 3
2∙10
3
0.22 2
80
1
2
-
50
6.
Валуе
в Ю.А.
I
II
0
.5
2.0 8∙
10
3
0.25 4
50
6
9
5
00
5
00
7.
Волко
в П.А.
I 0
.6
2.5 1
0∙10
3
0.3 5
6
- 1
00
8.
Вороб
ьев Д.
I
I
0
.7
3.0 1
0∙10
3
0.35 3
0
9
0
9.
Гаев
А.В.
I
II
0
.8
3.5 9∙
10
3
0.4 3
5
1
50
10.
Дунд
ук С.В.
I
II
0
.9
4.0 1
2∙10
3
0.45 8
0
9
0
-
90
11.
Евдок
имов
I
II
1
.0
4.5 1
5∙10
3
0.5 2
50
1
5
5
0
12.
Кост
ылев А.
I
II
1
.2
5.0 2
0∙10
3
0.55 8
40
1
60
2
5
-
65
13.
Кулич
ков К.
I 1
.4
5.5 1
6∙10
3
0.6 6
8
-
250
14.
Кучер
кова Н
I
I
1
.6
6.0 2
0∙10
3
0.65 5
0
3
00
15.
Ларьк
ина Е.
I
II
1
.8
6.5 1
9∙10
3
0.7 5
5
8
70
16.
Мамч
енко А
I
II
2
.0
7.0 2
1∙10
3
0.75 2
0
5
0
-
50
17.
Март
ынов В
I
II
1
.2
4.5 8∙
10
3
0.8 1
20
3
6
-
290
18.
Панче
нко Д.
I
II
1
.4
4.0 9.
5∙10
3
0.85 2
60
5
9
0
.2∙10
3
-
65
19.
Пили
I 1 5.5 1 0.9 2 1
пенко
.4 8∙10
3
8 00
20.
Семя
нников
I
I
1
.6
6.0 1
9∙10
3
0.95 7
0
1
50
21.
Скляр
ов И.А
I
II
1
.8
6.5 1
5∙10
3
1 4
5
6
20
22.
Сорок
олетов
I
II
2
.0
7.0 1
8∙10
3
0.9 7
5
2
50
-
200
23.
Султа
нова Д
I
II
0
.5
7.5 8∙
10
3
0.8 3
20
6
2
1
00
24.
Сухар
ева Д.
I
II
0
.6
7.0 1
0∙10
3
0.7 2
50
1
2
-
190
-
10
25.
Ходы
кин Н.
I 0
.7
6.5 2
0∙10
3
0.5 4
5
-
50
26.
Цыби
н М.С.
I
I
0
.8
6.0 1
3∙10
3
0.5 6
3
1
00
27.
Чебот
арев А
I
II
0
.9
5.5 1
4∙10
3
0.4 7
5
8
70
28.
Шило
Е.Н.
I
II
1
.0
5.0 1
8∙10
3
0.3 7
2
4
80
2
00
29.
Шиха
хмедов
I
II
1
.2
4.5 3
5∙10
3
0.2 1
70
3
8
-
65
I
II
1
.4
4.0 4
5∙10
3
0.15 8
40
1
50
0
.3∙10
3
1
.0∙10
3
Вопросы для самоподготовки
1. Общая постановка задачи оптимального быстродействия. Отличие от
постановки задачи Лагранжа.
2. Теорема принципа максимума.
3. Алгоритм решения задачи определения оптимального по
быстродействию программного управления.
4. Метод «стыкования решений».
5. Необходимо ли отключать управляющее воздействие в момент
времени
T
?
6. Что произойдет с ОУ, если
( )
î ï ò
u t
изменит знак не в момент времени
, а в момент времени
t
?
7. Что произойдет с ОУ, если
( )
î ï ò
u t
изменит знак не в момент времени
, а в момент времени
t
?
8. Теорема Фельдбаума.
9. Можно ли заранее узнать последовательность смены знака
max
U
?
10.От каких условий зависит последовательность смены знака
управляющего воздействия?
11.Почему перед тем, как определить
( )
î ï ò
u t
необходимо исследовать
объект управления на осцилляцию?
12.Почему на оптимальной траектории
( )x t
вектор-функция
( )t
не
равна нулю?
13.Какому значению равна функция Гамильтона на оптимальной
траектории. Запишите систему сопряженных уравнений. Связь
сопряженных переменных с координатами ОУ?
14.Почему на границах области определения
max
( )u t U
нарушается
равенство
0, 1, ?
ê
dH
k m
dU
Индивидуальное задание 3
«Синтез оптимальной по квадратичному критерию качества
системы автоматического управления токоограничения с
отсечкой»
1. Описание работы системы токоограничения с помощью
отрицательной обратной связи с отсечкой по току
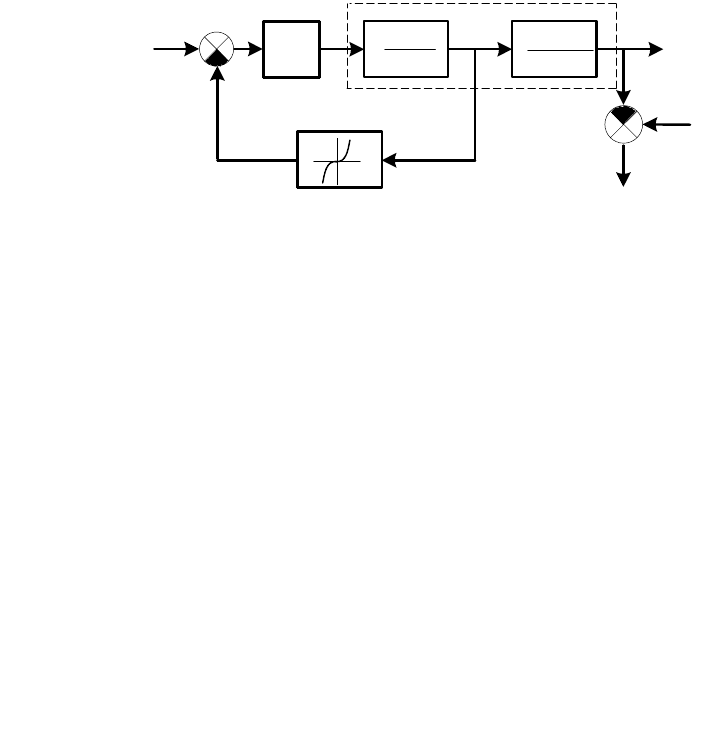
Структурная схема системы токоограничения с помощью
отрицательной обратной связи с отсечкой по току, показана на рис.1.
1
1Tp
M
1
k
T p
u
e
0
iR
1
U
П
k
2
U
)(
з
te
Рис.1. Структурная схема системы токоограничения
с отсечкой по току
На структурной схеме представлен двигатель с преобразователем
скорости вращения в ЭДС, преобразователь, передаточная функция которого
равна
( )
Ï Ï
W p k
и нелинейный канал ОС по току.
Канал обратной связи по току содержит нелинейное звено.
Аналитическое выражение статической характеристики хорошо
аппроксимируется степенным полиномом вида
3
131
2
12112
UbsignUUbUbU
.
Статическая характеристика нелинейного звена представлена на рис.2.
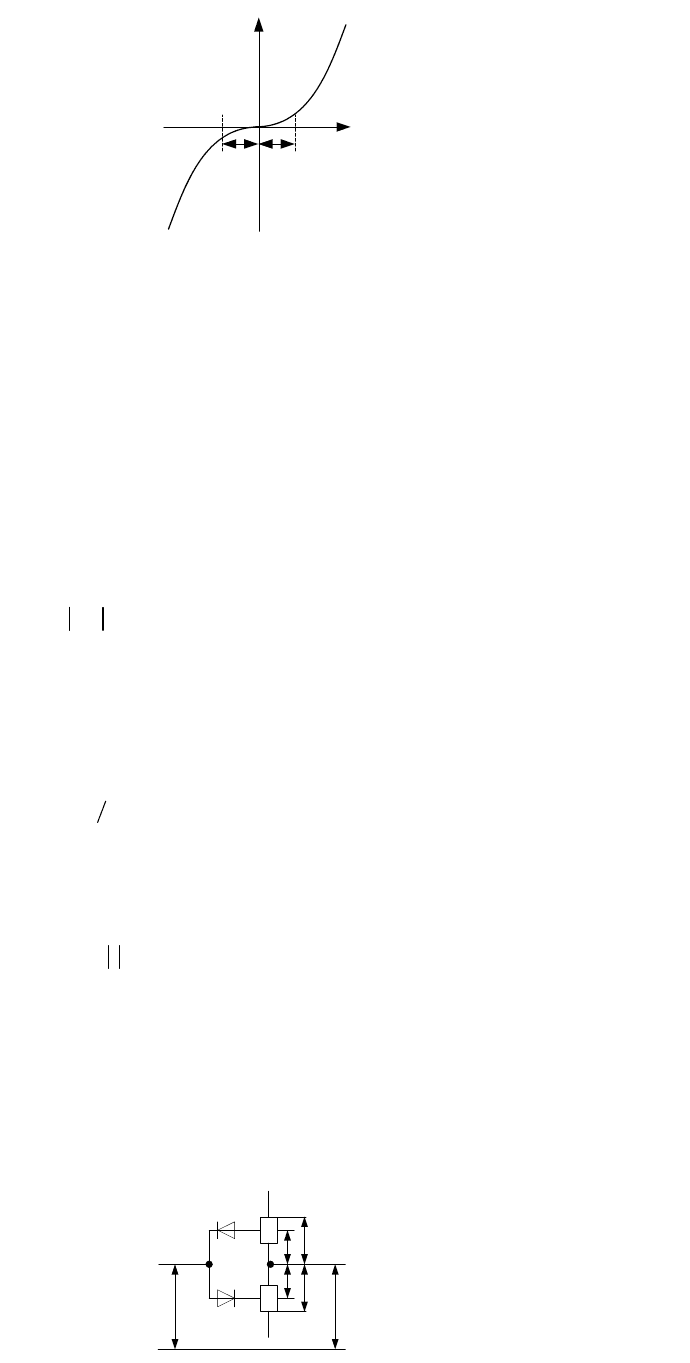
2
U
1
U
0
U
0
U
Рис.2. Статическая характеристика нелинейного звена
Также в канал ОС входят датчик тока и согласующее звено между
нелинейным звеном (НЗ) и суммирующим усилителем на входе
пре6образователя. Эти звенья являются безинерционными.
1
U
и
2
U
–
входной и выходной сигналы нелинейного звена,
0
U
– пороговое значение
напряжения отсечки, т.е. такое значение напряжения, при котором в случае
выполнения неравенства
01
UU
сигнал на выходе НЗ отсутствует.
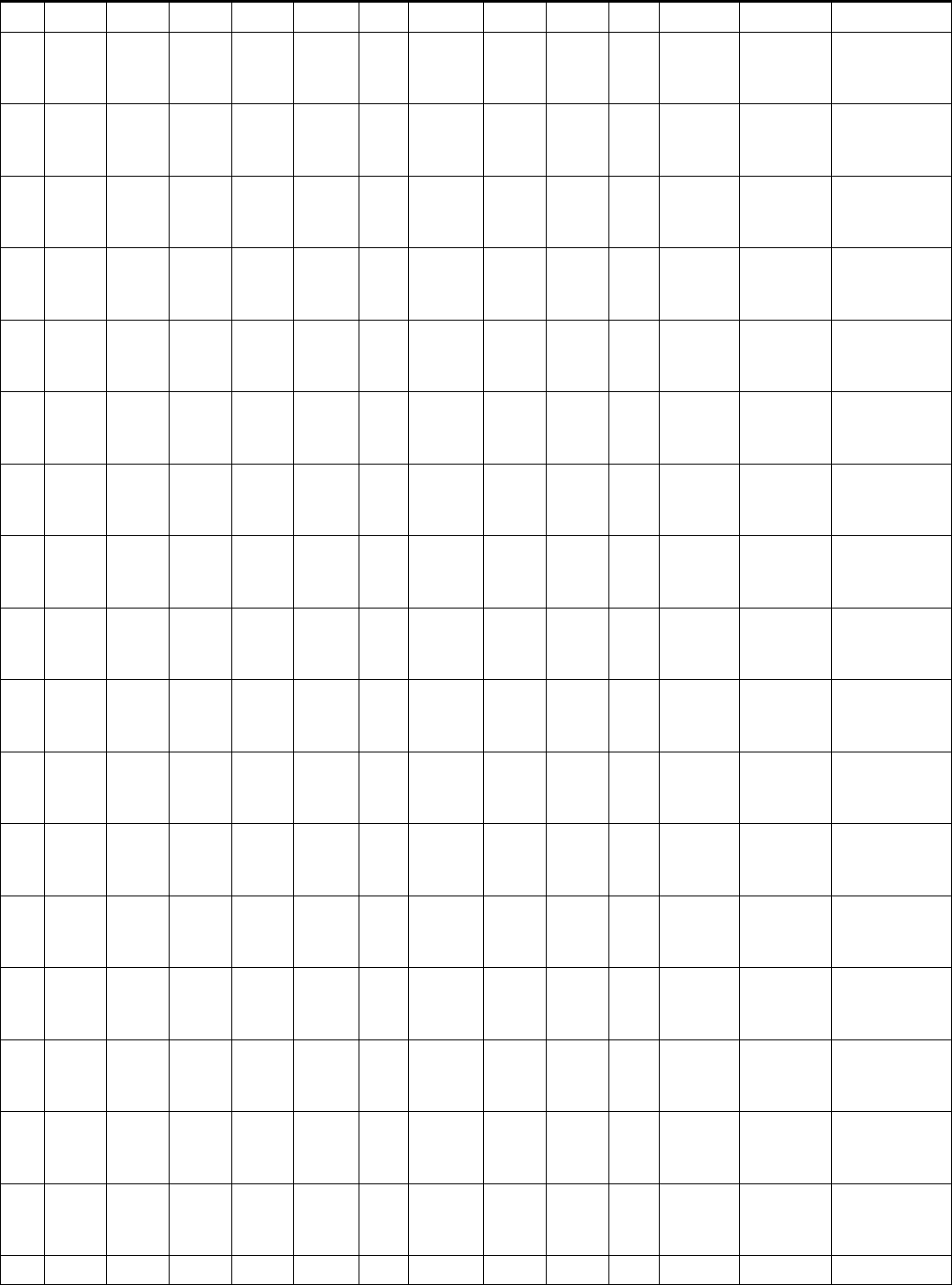
Пример схемы, реализующую статическую характеристику НЗ, показан
на рис3.
Нужная ширина зоны нечувствительности обеспечивается сравнением
напряжения отсечки
RErU
0
, зависящим от выбора сопротивления плеч.
Нелинейная характеристика НЗ обеспечивает практическое отсутствие
сигнала цепи ОС по току при значении тока
i
, меньшем тока уставки
у
I
.
Появление сигнала
2
U
при
у
Ii
приводит к уменьшению сигнала на входе
преобразователя и, следовательно, к снижению напряжения на якоре
двигателя. Это предотвращает интенсивное нарастание тока в переходных
процессах.
1
U
2
U
1
V
2
V
E
E
R
R
r
r
Рис.3. Принципиальная схема НЗ

Цель управления системой токоограничения с отсечкой
заключается в поддержании скорости вращения двигателя на
заданном уровне с максимальной точностью.
2. Последовательность выполнения ИЗ
1. Вывод математической модели объекта управления в соответствии с
вариантом задания.
1.1.Вывод математической модели невозмущенного движения объекта
управления в форме Коши. Рекомендации: обозначить
1
( ) ( )y t e t
,
2 0
( ) ( )y t i t R
,
u
– управляющее воздействие, выход регулятора.
1.2.Вывод математической модели возмущенного движения объекта
управления. Рекомендации. Обозначить
)()( tetg
з
– задающее воздействие,
1
( ) ( ) ( ) ( )
ç
x t t e t e t
– сигнал рассогласования.
2 2
( ) ( )x t y t
.
1.3.Линеаризация математической модели возмущенного движения
объекта управления в точке, соответствующей установившемуся режиму
работы двигателя.
1.4.Конструирование квадратичного критерия качества с учетом
максимально-допустимой ошибки. Рекомендации. Максимально допустимую
ошибку выбирать из следующих соображений
1max max
( )x t
,
2 max 1max
( )x U t
.
1.5.Синтез закона управления, оптимального по квадратичному критерию
качества для линеаризованной модели возмущенного движения объекта
управления методом АКОР.
2. Моделирование системы автоматического управления, ОУ – нелинейный,
(в среде Math Lab), анализ качества процесса управления. Рекомендации.
Результаты моделирования представить в виде временной диаграммы в
следующей последовательности:
( )u t
,
1
( )x t
,
2
( )x t
,
( )y t
и фазовый портрет.
3. Разработка структурной схемы устройства управления.
4. Заключение. В заключении должны быть представлены результаты
проделанной работы и произведён анализ качества процесса управления на
основе временных диаграмм.
Защита ИЗ не позднее 16 рабочей недели.
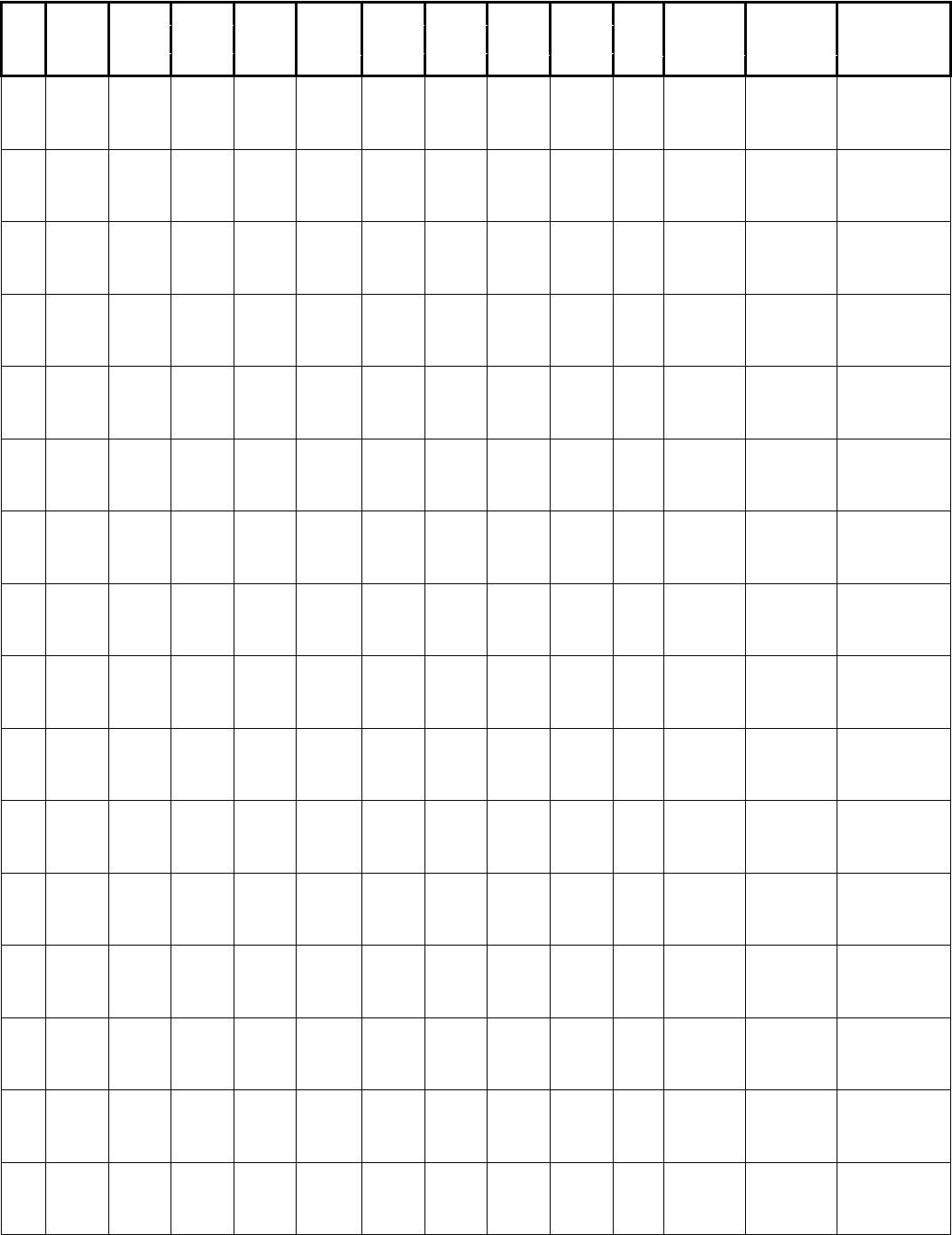
Таблица исходных данных, гр. А–15.
№
k
П
k
М
T
T
( )
ç
e t
1
b
2
b
3
b
max
U
pm
t
max
( )t
1max
( )U t
ФИ
О
1. 5 1 1 0
,5
5 0
,1
0
,05
0
,01
1
0
1 0
,09
0,
1
Григ
орьев
2.
4 0
,5
0
,5
0
,2
8 0
,7
0
,1
0
,05
2
0
0
,4
0
,04
0,
2
Зарха
таев
3.
6 3 2 0
,8
3 0
,5
0
,2
0
,01
1
0
1
,6
0
,08
0,
05
Заце
па Е.В.
4.
4 0
,5
2
,5
1
,2
2 0
,2
0
,08
0 1
5
2
,4
0
,05
0,
05
Каль
янов В
5.
4
,5
2
,1
5
,2
3
,1
4
,5
0
,5
0
,3
0
,1
1
5
6 0
,03
0,
1
Кова
лев А.
6.
6
,5
2
,2
3
,2
0
,9
2
,5
0
,8
0
,3
0
,01
1
5
1
,8
0
,05
0,
04
Крив
оносов
7.
5
,2
1
,8
1
,8
0
,6
5
,2
0
,6
0
,3
0
,03
1
2
1
,2
0
,07
0,
1
Куро
вченко
8.
7
,6
4
,2
1
,5
0
,7
3
,6
0
,6
0
,3
0
,03
1
5
1
,4
0
,04
0,
05
Макс
имов
9.
1
0,2
6
,3
2
,5
1
,25
1
0
0
,6
0
,3
0
,03
1
0
2
,5
0
,1
0,
9
Мелк
онян
10.
8
,2
3
,5
1 0
,5
5 0
,5
0
,6
0 1
3
1 0
,09
0,
06
Нуж
ный Е.
11.
4
,1
1
,2
0
,42
0
,3
5 0
,6
0
,5
0
,05
2
5
0
,6
0
,06
0,
1
Орло
ва О.Н
12.
4
,5
2
,1
0
,84
0
,52
8 0
,7
0
,5
0 1
5
1
,1
0
,08
0,
2
Петч
енко Н
13.
6
,5
2
,2
1
,8
0
,6
5 0
,6
0
,2
0
,02
1
4
1
,2
м 0,
08
Пота
пов Е.
14.
8 3 2
,5
1
,2
6 0
,7
0
,2
0 1
0
2
,4
0
,03
0,
08
Сели
мов Ч.
15.
5 1 0
,7
0
,3
5
,5
0
,2
0
,1
0
,01
9 6 0
,06
0,
1
Ског
орев Д
16.
5
,6
3
,2
5
,2
2
,2
4
,5
0
,7
0
,5
0
,05
1
0
4
,4
0
,08
0,
08
Таби
шев А.
17.
4
,5
2
,1
0
,84
0
,5
6 0
,5
0
,4
0
,1
1
4
1 0
,05
0,
12
Тамб
иев Ш
18.
7
,6
4
,2
2
,5
1
,2
4
,8
0
,7
0
,3
0
,03
1
6
2
,4
0
,01
0,
06
Таце
нко С.
19.
8
,5
1
,5
0
,64
0
,32
5
,2
0
,45
0
,25
0
,04
1
2
0
,7
0
,04
0,
06
Типа
н О
20.
2
,6
0
,8
2
,5
1
,2
1
,8
0
,8
0
,45
0
,05
1
8
2
,4
0
,06
0,
07
Тито
в А.Е.
21.
8
,2
3
,5
4
,1
1
,5
6
,5
0
,28
0
,75
0 1
1
3 0
,1
0,
08
Удин
Й.
22.
1 2 0
,75
0
,54
2 0
,25
0
,07
0 1
2
1
,1
0
,03
0,
2
Унди
ренко
23.
4
,5
2
,1
4
,9
2
,8
6
,2
0
,51
0
,23
0
,05
1
4
5
,5
0
,08
0,
12
Ушак
ов А.
24.
7
,6
4
,2
2
,0
0
,8
4
,5
0
,55
0
,15
0
,02
1
2
1
,6
0
,05
0,
06
Чере
вцов Д
25.
8
,5
2
,4
2
,5
1
,5
2
,8
0
,55
0
,2
0
,01
9 3 0
,01
0,
03
Черн
ышов
26.
7
,5
4
,0
2
,2
0
,86
3
,8
0
,65
0
,2
0
,02
1
5
1
,8
0
,08
0,
05
Чжан
И.
27.
3
,5
1
,8
0
,5
0
,7
5
,1
0
,46
0
,25
0
,05
1
2
1 0
,05
0,
15
Шап
овалов
28.
4
,5
2
,2
2
,7
1
,8
4 0
,75
0
,35
0 9 3
,2
0
,03
0,
08
Шев
ченко
29.
3
,8
1
,98
4
,8
2
,9
3
,5
0
,6
0
,25
0 1
3,5
3
,8
0
,08
0,
09
Шил
ов П.
30.
8
,2
2
,4
2
,5
1
,5
5
,0
0
,55
0
,2
0 1
1
3 0
,09
0,
06
Сове
ткин
31.
2
,3
1
,5
4
,8
2
,0
4 0
,75
0
,45
0 1
8
4 0
,06
0,
18
Цату
рян С.
Таблица исходных данных, гр. А–25
№
k
П
k
М
T
T
( )
ç
e t
1
b
2
b
3
b
max
U
pm
t
max
( )t
1max
( )U t
1. 1 2 0 0 1 0 0 0 1 0 0 0,
Авджа
,8 ,4 ,1 ,05 0 ,8 ,05 1
н А.Г.
2.
5 2 8 4 2 0
,2
0
,025
0 1
0
8 0
,07
0,
04
Бокар
ев А.А
3.
1
0
5 2 0
,8
1
0
0
,2
0
,1
0
,05
5 1
,6
0
,01
0,
1
Бурма
тов А.
4.
8 3 0
,9
0
,4
4 0
,5
0
,2
0 8 0
,8
0
,03
0,
2
Бухто
яров В
5.
1
0
5 1
,8
0
,6
3 0
,6
0
,3
0 9 1
,2
0
,06
0,
03
Быков
С.А.
6.
5 2
,5
2
,5
1
,4
3 0
,8
0
,3
0
,02
8 1
,8
0
,1
0,
06
Валуе
в Ю.А.
7.
8 1 5 2
,5
6 0
,5
0
,1
0
,02
1
0
5 0
,07
0,
07
Волко
в П.А.
8.
1
0
2 1
0
5 1
0
0
,8
0
,4
0 1
2
1
0
0
,09
0,
1
Вороб
ьев Д.
9.
2 0
,5
2
,5
1
,2
2
,5
0
,6
0
,2
0
,02
1
0
2
,4
0
,01
0,
125
Гаев
А.В.
10.
8
,5
2
,4
0
,84
0
,52
2
,5
0
,6
0
,2
0
,02
9 1 0
,04
0,
34
Дунду
к С.В.
11.
6
,2
1
,8
0
,62
0
,25
5 0
,5
0
,25
0 1
0
0
,5
0
,06
0,
08
Евдок
имов
12.
5
,6
3
,2
1
,2
0
,6
3 0
,5
0
,2
0
,01
1
1
1
,2
0
,08
0,
05
Косты
лев А.
13.
8 2 2
,5
1
,4
4
,5
0
,5
0
,25
0
,03
8 2
,8
0
,1
0,
06
Кулич
ков К.
14.
4
,5
2
,25
3
,5
1
,6
2
,8
0
,5
0
,4
0
,02
8 3
,2
0
,09
0,
06
Кучер
кова Н
15.
2
,6
1
,2
5
,2
2
,2
4 0
,8
0
,5
0
,05
2
0
4
,4
0
,01
0,
15
Ларьк
ина Е.
16.
1
0,2
4
,2
0
,64
0
,32
5
,6
0
,7
0
,5
0 9 0
,6
0
,03
0,
05
Мамч
енко А
17.
5
,4
2
,2
2
,5
1
,2
4
,6
0
,8
0
,5
0 1
0
2
,4
0
,06
0,
85
Март
ынов В
18.
2
,5
1
,2
0
,7
0
,3
5 0
,5
0
,6
0 2
0
0
,6
0
,08
0,
2
Панче
нко Д.
19.
8 1 2 1 3 0 0 0 9 2 0 0,
Пилип
,5 ,5 ,5 ,2 ,6 ,4 ,5 ,05 ,4 ,05 04
енко
20.
6
,8
2
,5
4
,1
1
,5
4 0
,8
0
,6
0
,05
1
4
3 0
,07
0,
06
Семян
ников
21.
5
,4
2
,1
0
,85
0
,4
6 0
,2
0
,5
0 1
4
0
,8
0
,01
0,
10
Скляр
ов И.А
22.
2
,6
0
,8
1
,25
0
,8
2 0
,7
0
,5
0
,05
2
0
1
,6
0
,03
0,
07
Сорок
олетов
23.
5
,2
1
,6
2
,5
1
,6
5 1 0
,8
0
,02
2
5
3
,2
0
,04
0,
09
Султа
нова Д
24.
5
,6
3
,2
2
,5
1
,4
4 0
,8
0
,5
0
,05
1
2
2
,8
0
,1
0,
07
Сухар
ева Д.
25.
8
,5
2
,4
3
,5
1
,6
3 0
,6
0
,2
0
,02
1
0
3
,2
0
,07
0,
04
Ходы
кин Н
26.
2
,6
1
,2
1 0
,5
6 0
,7
0
,5
0
,05
1
8
1 0
,09
0,
2
Цыби
н М.С.
27.
8 1 0
,7
0
,3
5 0
,6
0
,1
0
,02
1
1
0
,6
0
,01
0,
15
Чебот
арев.
28.
1
0,2
4
,2
2
,5
1
,6
6
,5
0
,8
0
,4
0 1
2
3
,2
0
,04
0,
06
Шило
Е.Н.
29.
6
,8
2
,5
1
,5
0
,7
5
,4
0
,6
0
,6
0
,05
1
3
1
,4
0
,1
0,
08
Шиха
хмедов
Вопросы для самоподготовки. Тема «Синтез оптимальных по
кавдратичному критерию качества САУ»
1. Что значит понятие невозмущенного движения ОУ?
2. Что значит понятие возмущенного движение ОУ?
3. Какие отличия между математическими моделями возмущенного и
невозмущенного движения ОУ?
4. При выполнении какого условия математическая модель первого
приближения адекватно отображает динамическое поведение ОУ?
8. Какие основные задачи призвано выполнять стабилизирующее
управляющее воздействие?