Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
632
=+
=−
0
2
0
11
00
22 1
() cos sin ,
() cos sin ,
x
xt x t t
xt x t x t
ωω
ω
ωωω
(24.1.3')
and we can write the application
()
⎛⎞
=+ −
⎜⎟
⎝⎠
0
2
00 0 0 0
12 1 2 1
;, cos sin, cos sin
x
ftx x x t tx t x tωωωωω
ω
,
(24.1.3'')
with
+
×→
22
:f . The corresponding representation in the three-dimensional
space
+
×
2
is given in Fig. 24.1.
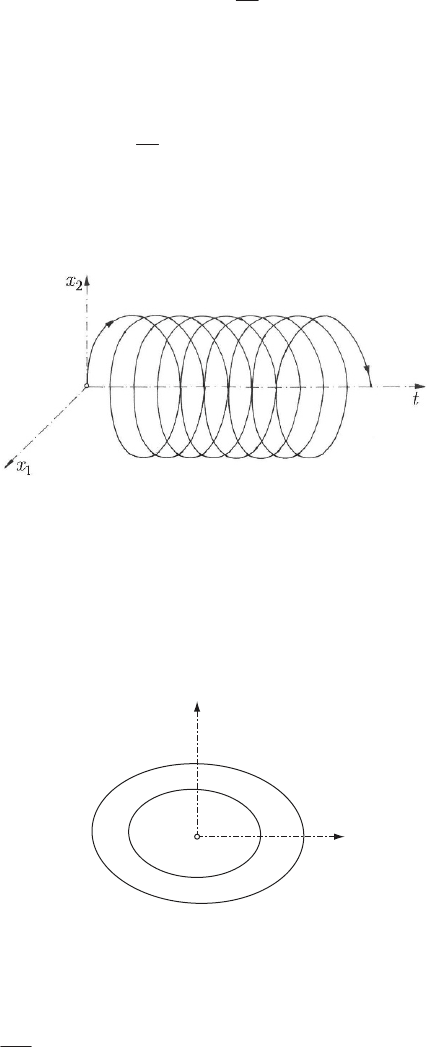
Fig. 24.1 Representation of the motion of a non-damped linear oscillator
in the three-dimensional space
2+
×
The equations (24.1.3) lead to
=−
2
21 12
d/d /xx xxω , wherefrom
[][]
+= = + =
22
22 2 2 2 2
12 1 2
,(0)(0)constxxcc x xωω
,
(24.1.3''')
obtaining a family of ellipses in the phase space
2
(Fig. 24.2).
Fig. 24.2 Motion of the representative point of a non-damped
linear oscillator in the phase plane
Let be now the autonomous system (24.1.1'') written in a scalar form
==
12
d
( , ,..., ), 1,2,...,
d
i
n
i
x
Xxx x i n
t
,
(24.1.4)
O
c
c/ω
x
1
x
2

Dynamical Systems. Catastrophes and Chaos
633
where
i
X are smooth functions (of class
1
C ); we can write this system also in the form
of a system of
− 1n equations
==
12
1112
d ( , ,..., )
,2,3,...,
d ( , ,..., )
n
jj
n
xXxx x
jn
xXxx x
,
(24.1.4')
where we supposed that
≠
1
() 0Xx . The solutions of this system are orbits which do
not pierce one the other. If
=
1
() 0Xx and ≠
2
() 0Xx , then we choose
2
x as
independent variable.
The point
∗
∈x
n
for which
∗
=Xx() 0
(24.1.5)
is called fixed point of the system (24.1.1''); obviously, it is also a solution of the system
(24.1.4). This point is called critical point too or – in case of mechanical systems –
point of equilibrium. We notice that the system (24.1.1'') cannot be written in the form
(24.1.4') in the neighbourhood of such a point.
If, in the neighbourhood
∈
n
A of a fixed point
∗
x of the autonomous system
(24.1.1''), the condition
∈x
0
()tA implies
∗
→∞
=xxlim ( )
t
t ,
(24.1.6)
then this point is called attractor; if this property takes place for
→−∞t , then the
point is a repeller.
If a solution
0
(; )tfx of the system of equations (24.1.1) verifies the relation
00
(;)(;)tT t+=fxfx for
+
∈t , then this one is periodical, corresponding a closed
orbit (which can be a limit cycle too) in the phase space.
If, for
→∞t , the point x()t becomes asymptotical on a limit cycle, then this one
is a (stable) attractor, while if this property takes place for
→−∞t , then one obtains a
(instable) repulsive limit cycle.
In the frame of the above considerations, we can take again the Theorem 23.1.22 and
state (Poincaré, H., 1952).
Theorem 24.1.1 (Poincaré–Bendixon). If the integral curve
2
00
(; ) , t =∈0 fx x ,
≥ 0t
, of the system of equations (24.1.1) with
= 2n
is contained in a bounded
domain in the phase space, then a possible attractor is a fixed point or a limit cycle.
In Sect. 23.1.1.4, it has been made a study of the stability of equilibrium of an
autonomous discrete mechanical system with a single degree of freedom in linear
approximation. One obtains thus portraits of phase in the neighbourhood of the fixed
points, i. e.: nodes (which can be attractors (Figs. 23.6 and 23.9b) or repellers
(Figs. 23.5 and 23.9a)), linear attractors (Fig. 23.8b), repulsive lines (Fig. 23.8a),
saddle points (Fig. 23.7), foci (which can be attractors (Fig. 23.10b) or repellers
(Fig. 23.10a)) or centres (Fig. 23.11). The case in which the autonomous discrete
mechanical system has
n degrees of freedom has been considered in Sect. 23.1.1.5.
MECHANICAL SYSTEMS, CLASSICAL MODELS
634
Let be the differential equation
′
=− −mx kx k x
,
(24.1.7)
corresponding to the motion of a particle acted upon by an elastic force
−kx
and by a
force of viscous damping
kx
′
; we can write in the phase plane
22
122 1 2
,2,,2
kk
xxx px xp
mm
λλ
′
==−− = =
,
(24.1.7')
with the solutions
−−
=−=−
11 121 2
ecos( ), ecos( )
tt
xA t xA t
λλ
αϕ αϕ
,
(24.1.7'')
where the constants
12 1
,,,AAαϕ and
2
ϕ are determined as functions of ,,mkk
′
and
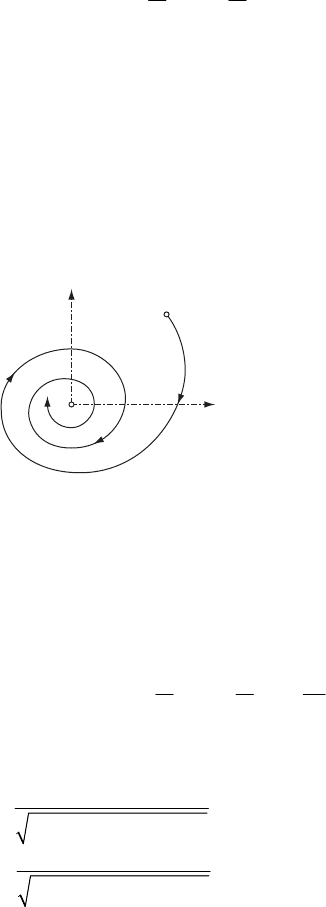
of the initial conditions. The trajectory in the phase plane has the form of a spiral; we
notice that
→
1
0x and →
2
0x for →∞t and for any initial conditions (Fig. 24.3).
The origin
O is a fixed point, i. e. an attractor, its existence being a characteristic of the
damped motions. In this case, the whole phase is the basin of the attractor.
Fig. 24.3 Motion of the representative point of a damped linear oscillator in the phase plane
Adding a perturbing force, we obtain the equation
′
=− − +
0
cosmx kx k x F tω ,
(24.1.8)
which leads, in the phase space, to the system of differential equations
′
==−−+ = ==
0
22
122 1 2
,2cos,,2,
F
kk
xxx px xq tp q
mmm
λω λ ,
(24.1.8')
with the solutions (
< pλ )
()
()
−
−
=−+ −
−+
=−− −
−+
11 1
2
22 22
21 2
2
22 22
ecos( ) cos( ),
4
ecos( ) sin( ),
4
t
t
q
xA t t
p
q
xA t t
p
λ
λ
αϕ ωψ
ωλω
ω
αϕ ωψ
ωλω
(24.1.8'')
O
x
1
x
2
P
0
Dynamical Systems. Catastrophes and Chaos
635
where the constants
12 12
,,,,,AAαϕ ϕ ψ are determined as functions of
0
,, ,mkk F
′
and of the initial conditions. The periodic particular solutions
() ()
==
−+ −+
12
22
22 22 22 22
,
44
qq
aa
pp
ω
ωλωωλω
(24.1.9)
lead, by eliminating the temporal variable, to a closed trajectory (an ellipse)
+=
22
12
22
12
1
xx
aa
.
(24.1.9')
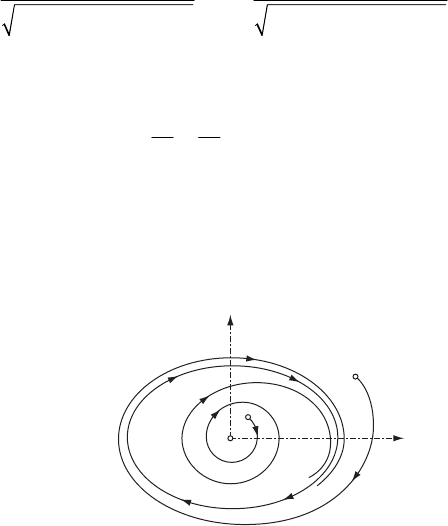
We notice that for
→∞t the solutions (24.1.8'') tend to the solutions (24.1.9); hence,
starting from an initial point
0
P
, interior or exterior to the ellipse, the trajectory tends to
the latter one. In this case, the attractor is of limit cycle type, its basin being the whole
phase plane too (Fig. 24.4).
Fig. 24.4 The attractor of limit cycle type of a damped linear oscillator acted
upon by a perturbing force in the phase plane
As we know (see Sect. 8.2.2.4), by the superposition of two harmonic vibrations
(periodic motions) with periods which have not a common multiple, one obtains a
non-periodic (pseudoperiodic) motion, which – after H. Poincaré – admits a
representation in a three-dimensional phase space; starting from an arbitrary initial
point
0
P , the trajectory tends to be an envelope on a torus in
3
for →∞t . In this
case, the attractor is a dense curve on the torus.
In general, in the case of the system of differential equations (24.1.1), we assume
that the initial point
= x
00
()PP belongs to a set of points
n
D ⊂ and that for
→∞t the solution x()t tends to a set of points A . We say that the set A is an
attractor for the solutions which start from the set
D ; the maximal set
max
D for which
→PA for →∞t if ∈
max
0
PD is called the basin of the attractor A . The set A
can be a point, a limit cycle in
2
or in
3
or a hypertorus in
n
. If →PA for
→−∞t , then the set A is a repeller (a repulsive set).
A study of the non-linear systems of differential equations and their connection to
linear systems is given in Sects. 23.1.2.3 and 23.1.2.4.
x
1
x
2
P
0
P
0
O

MECHANICAL SYSTEMS, CLASSICAL MODELS
636
Let be the autonomous system of differential equations
=+ ∈ ≠
x
Ax f x x A
d
(), ,det 0
d
n
t
(24.1.10)
with
=fx xlim | ( ( ) | / | | 0 for →x|| 0, the fixed point being = 0x . H. Poincaré
showed that, if
= 2n , then any singular point of the linearized system of differential
equations (with
=fx() 0 ) has a corresponding singular point, of the same type and
with the same type of stability, for the system of non-linear differential equations; but
we mention that to a centre of the linearized system corresponds a centre or a focus for
the non-linear one. In the general case (for an arbitrary
n ) one can show that = 0x is
an attractor (repeller) for the non-linear system too. As well, if the matrix
A has an
eigenvalue with a positive real part, then
= 0x is no more attractor for the non-linear
system.
If the matrix
A is singular ( =Adet 0 ), then – beside the critical point
∗
x – there
exist in
n
also other manifolds which have this property (straight lines, planes etc.).
The dimension of these manifolds is equal to the dimension of the nucleus of the
matrix
A
dim ker nr=−A , (24.1.10')
where
n is the order of the matrix, while r is its rank. We can say that these manifolds
correspond to some positions of indifferent equilibrium in the case in which the
dynamical system is a mechanical one.
A mechanical system can remain in equilibrium an indefinite time at a critical point
∗
x if no perturbation intervenes; such perturbations cannot be avoided, because –
practically – one cannot take into account, in the mathematical modelling, all the factors
which determine the behaviour of the mechanical system. Obviously, a good
mathematical model is that in which one takes into account the most important factors;
the factors which we neglect lead, in general, to very small perturbations, which may be
internal perturbations (called noise) or external perturbations (resulting from factors
external to the dynamical system). The importance of the study effected in the
preceding chapter on the stability of the equations of equilibrium is thus put in
evidence.
Let be, e. g., Helmholtz’s oscillator
=+
2
2
2
d
d
x
xx
t
,
(24.1.11)
which leads to the system of differential equations of first order (
=
1
xx,
=
21
d/dxxt)
==+
12
2
211
dd
,
dd
xx
xxx
tt
,
(24.1.11')
,
Dynamical Systems. Catastrophes and Chaos
637
with the fixed points
12 12
( , ) (0,0), ( , ) ( 1,0)xx xx
∗∗ ∗∗
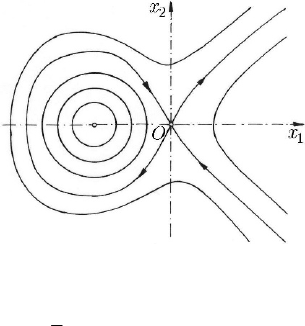
==−; a linear analysis shows that
the first fixed point is a saddle point, while the second one is a centre (Fig. 24.5). A first
integral (the mechanical energy integral) is of the form
Fig. 24.5 Representation of the motion of Helmholtz’s oscillator in the phase plane
−− = =
22 3
21 1
2
,const
3
xx xCC
,
(24.1.11'')
corresponding the orbits in the figure. The curve corresponding to
= 0C passes
through the point
−(3/2,0) and is called homoclinic orbit.
24.1.1.2 Non-autonomous Systems of Linear Differential Equations with a Control
Function
We consider now a non-autonomous system of differential equations (24.1.1),
(24.1.1') of the form
=+xAxBv()t
,
(24.1.12)
where
A and B are constant matrices and =vv()t , with
⎡⎤
⎡
⎤
⎡⎤
⎢⎥
⎢
⎥
⎢⎥
⎢⎥
⎢
⎥
⎢⎥
===
⎢⎥
⎢
⎥
⎢⎥
⎢⎥
⎢
⎥
⎢⎥
⎢⎥
⎢
⎥
⎣⎦
⎣
⎦
⎣⎦
AB v
1
11 12 1
11 12 1
2
21 22 2
21 22 2
12
12
,,
m
n
n
m
nn
nn m
nm
nn
v
bb b
aa a
v
aa a
bb b
aa a
v
bb b
;
(24.1.12')
the matrix
A is a square one of order n , the matrix B is a rectangular matrix with n
rows and
m columns, while the function v()t , called control function too, is a column
vector with
m rows.
We write the general solution of the system (24.1.12) in the form
=
A
xce()
t
t
,
(24.1.13)

MECHANICAL SYSTEMS, CLASSICAL MODELS
638
where we use the formal expansion
=+ + +
A
IAA
2
2
e ...
1! 2!
t
tt
,
(24.1.13')
I
being the unit matrix, and where
[]
=c
T
12
() (), (),..., ()
n
tctctct
(24.1.13'')
is a column matrix with
n rows. Introducing in (24.1.12), we obtain – easily –
−
=
A
cBv() e ()
t
tt, wherefrom
−
=+
∫
AA
xx Bv
()
0
0
() e e ( )d
t
tt
t
τ
ττ
,
(24.1.13''')
with the initial condition
==xcx
0
(0) (0) .
Often, the system (24.1.12) is encountered in the form
=+ =xAxBv
y
Cx
T
(),t
,
(24.1.14)
where
C is a constant rectangular matrix with n rows and m columns
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
C
11 12 1
21 22 2
12
m
m
nm
nn
cc c
cc c
cc c
,
(24.1.14')
while
=y
T
12
[ , ,..., ]
m
yy y is a column vector with m rows.
If the eigenvalues
i
λ of the matrix A are distinct, then the corresponding
eigenvectors are
=u , 1,2,...,
i
in(column vectors with n rows); we have seen in
Sect. 23.1.1.5 that one can obtain thus the general solution (the proper mode) of the
system of equations (23.1.31').
We pass to Jordan’s canonical form by a change of function
=xT
ξ
,
(24.1.15)
where
=Tuu u
12
[ , ,..., ]
n
is the square matrix formed by juxtaposing the eigenvectors
(column vectors) of the matrix
A , while =
T
12
[ , ,..., ]
n
ξξ ξξ is a column matrix with
n rows. Introducing in (24.1.14), we get
=+ =JPv yR
T
(),t
ξξ ξ
,
(24.1.16)
where

Dynamical Systems. Catastrophes and Chaos
639
−−
===JTATPTBRTC
11T
,,
(24.1.16')
are Jordan’s matrix of the system of differential equations, the matrix of modal control
and the matrix of modal observability, respectively.
The rectangular matrix
P
with n rows and m columns is called control matrix
because any zero element of it corresponds to a certain proper mode which is not
controlled by a certain component of the column vector
v()t ; if all the elements of a
row of the matrix
P
vanish, then a whole proper mode is not controlled. As well, the
rectangular matrix
R
with n rows and m columns is called observability matrix,
because any zero element of it indicates that a certain proper mode is not observable in
a component of the column vector
y ; if all the elements of a row of the matrix
R
vanish, then a whole proper mode is not observable.
Assuming that the characteristic equation of the matrix
A
has distinct roots
i
λ
, the
eigenvectors being given by
==Au u , 1,2,...,
iii
inλ
, it results
[
]
[
]
[
]
== =AT A u u u Au Au Au u u u
12 1 2 1122
, ,..., , ,..., , ,...,
nnnn
λλ λ .
Observing that the matrix
−∗∗∗
=Tuuu
1T
12
[ , ,..., ]
n
can be obtained by the superposition
of the row vectors
, 1,2,...,
j
j
n
∗
=u , which have the property
∗
=δuu[][]
j
iij
, where
, , 1,2,...,
ij
ij nδ= , is Kronecker’ symbol, we may write
[]
∗
∗
−
∗
⎡⎤
⎡
⎤
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
==
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎣
⎦
⎢⎥
⎣⎦
u
u
TAT u u u
u
1
1
2
2
1
11 22
00
00
, ,...,
00
nn
n
n
λ
λ
λλ λ
λ
,
the Jordan matrix
J being thus a diagonal matrix.
The equations (24.1.16) can be separated in the form
=
ξ= ξ+ =
∑
1
( ), 1,2,...,
m
iii
ik k
k
pv t i nλ
,
(24.1.17)
where
, 1,2,..., , 1,2,...,
ik
pi nk m==, are the elements of the matrix P ;
i
ξ are thus
normal co-ordinates. In this case,
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
=+ + + =
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
J
IJ J
1
2
3
2
2
e00 0
0e 0 0
e...
00e 0
1! 2!
000 e
n
t
t
t
t
t
tt
λ
λ
λ
λ
,

MECHANICAL SYSTEMS, CLASSICAL MODELS
640
and the solutions of the system of Jordan normal (canonical) equations (24.1.17) are
written in the form
−
=
ξ= ξ+ =
∑
∫
0()
0
1
e e ( )d , 1,2,...,
ii
m
t
tt
ii
ik k
k
pv i n
λλτ
ττ ,
(24.1.17')
where the initial conditions
0
(0) , 1,2,...,
ii
inξξ== , have been introduced.
If the characteristic equation of the matrix
A has multiple roots, then appear Jordan
blocks in the matrix of the canonical differential equations; obviously, the calculation
becomes more complicated, but can be followed on the same way.
Often, the control is realized by a scalar control function
()vt , the matrix B being
reduced to a column vector
=b
T
[0,0,...,0,1] with n rows and only one non-zero
element, equal to unity, the system (24.1.12) being of the form
=+ ∈xAxb x(),
n
vt
.
(24.1.18)
If the matrix
A has eigenvalues with a negative real part, then the configuration of
equilibrium is asymptotically stable; in this case, by a small perturbation
()vt , the
mechanical system (in case of such a system) tends to a configuration of equilibrium if
the perturbation disappears. If the matrix
A has also eigenvalues with a non-negative
(positive or null) real part, then the mechanical system is instable, moving much away,
for very small perturbations,
()vt , from the position of equilibrium. It is also possible
that the matrix
A be instable; in this case, the stabilization of the equilibrium is made
by control.
Replacing the operator
d/dt by D , one can write the system (24.1.18) in the form
−+ =AIxb(D) ()vt 0 ,
(24.1.18')
wherefrom
1
(D)()vt
−
=− −xAIb;
(24.1.18'')
it results
= (D) ( )
ii
xf vt,
(24.1.19)
the functions
(D), 1,2,...,
i
fi n= , being rational functions of the operator
D
. We can
successively calculate
−
−
== =
11
11
2
(D) (D)
(D)(), (),..., ()
(D) (D)
n
nn
n
n
ff
x f vt x vt x vt
ff
;
(24.1.19')
one can thus schematize the block schema of the system by circuits with feed-back. By
the application method, we choose the control function in the form
Dynamical Systems. Catastrophes and Chaos
641
=⋅+gx
T
() ()vt vt ,
(24.1.20)
where
=g
T
12
[ , ,..., ]
n
gg g
is a column vector, while the point corresponds to a scalar
product. Replacing in the system (24.1.18), it results
=+ =+xxb Ab
g
T
(),vt
ΛΛ ;
(24.1.20')
in a developed form, the characteristic equation
−=Idet[ ] 0ρΛ becomes
−−
−
+++++=
12
12 1
... 0
nn n
n
n
aa aaρρ ρ ρ ,
(24.1.20'')
where the coefficients
i
a are linear functions of , , 1,2,...,
j
gij n= . Choosing
convenient roots (with a negative real part, sufficient great in absolute value), Viète’s
relations determine the coefficients
, 1,2,...,
i
ai n= , hence the column vector
g
too;
the input for the block schema of the system is only the perturbation
()vt .
One can study many interesting problems on this way, e. g., the rolling stability of an
airplane or the control stability of the artificial satellites of the Earth.
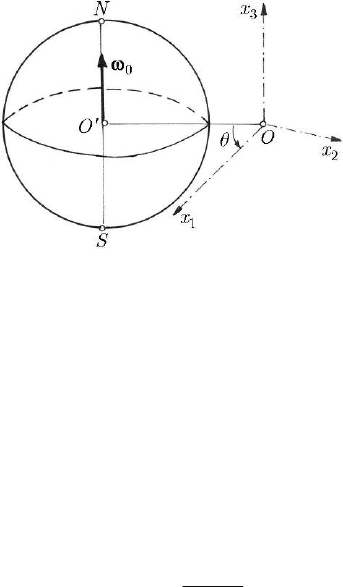
Fig. 24.6 Motion of an artificial satellite of the Earth
In what concerns the last problem, let us consider an artificial satellite of the Earth,
the mass centre
O of which moves with the angular velocity
0
ω on a circular
trajectory situated in the terrestrial equatorial plane (Fig. 24.6). The principal axes of
inertia
1
Ox and
2
Ox are situated in the equatorial plane, while the principal axis
3
Ox
is normal to this plane. Besides the attraction force of the Earth acts also a couple of
moment
=−
2
0
312
3( )MIIωθ, where
θ
is the angle made by the
1
Ox
-axis with the
straight line
′
OO
,
′
O
being the mass centre of the Earth; this angle specifies the small
oscillations of the satellite about the
3
Ox
-axis and is given by the theorem of moment
of momentum written with respect to this axis
−
+= =
21
222
0
3
0, 3
II
pp
I
θθ ω
,
(24.1.21)