Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
582
where
′′′
=+
kkk,
1
x and
2
x being the displacements of the masses from the position
of equilibrium (
12
0xx==). When the oscillators are in the position of equilibrium,
then the mechanical system is symmetric with respect to the centre
O
. The reflection of
the co-ordinates with respect to the centre, followed by interchange of masses, defined
by the relation
′′
=− =−
1221
,xxxx,
(23.2.34)
lets invariant the expressions of the energies
T
and
V
; hence, the Lagrangian of the
discrete mechanical system is invariant to the transformation (23.2.34). The matrix
associated to this transformation is
−
⎡
⎤
=
⎢
⎥
−
⎣
⎦
D
01
10
.
(23.2.34')
From the secular equation
−DEdet[ ]μ it results
=±1μ
, hence the representation D
can be reduced to the diagonal form
⎡
⎤
=
⎢
⎥
−
⎣
⎦
D
0
10
01
,
which corresponds to the decomposition of the representation
D into two irreducible
ones. The determined symmetry does not reduce, in this case, the number of the
possible frequencies. To determine the matrix
S , we use the relation
−
−
⎡
⎤⎡ ⎤
==
⎢
⎥⎢ ⎥
−−
⎣
⎦⎣ ⎦
SS
1
01 10
10 0 1
,
which leads to
−
−
⎡
⎤
=
⎢
⎥
⎢
⎥
⎣
⎦
S
11 11
1
21 21
SS
SS
.
Hence, the symmetry co-ordinates are given by the relations
−
−
⎡
⎤
⎡⎤
⎡⎤
==
⎢
⎥
⎢⎥
⎢⎥
+
⎣⎦
⎢⎥
⎢
⎥
⎣⎦
⎣
⎦
S
111112
1
2
2
21 1 2
()
()
QxSxx
x
Q
Sx x
.
We obtain
′
−
⎡
⎤
⎡⎤
==
⎢
⎥
⎢⎥
′
−
⎢
⎥
⎣⎦
⎣
⎦
AB
0
,
0
mkk
m
kk
,
Stability and Vibrations
583
from (23.2.33), hence
′
+
⎡
⎤
⎡⎤
⎢
⎥
⎢⎥
⎢
⎥
==
⎢⎥
′
−
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎣⎦
⎣
⎦
SAS SBS
22
11 11
TT
2
2
21
11
00
22
,
0
0
2
2
mkk
SS
m
kk
S
S
.
Because
==
11 21
/2SS m
, it results
′
+
⎡
⎤
⎢
⎥
==
⎢
⎥
′
−
⎢
⎥
⎣
⎦
SAS ESBS
TT
0
,
0
kk
m
kk
m
;
the symmetry co-ordinates (23.2.35) become
() ()
112212
,
22
mm
QxxQxx=−=+
(23.2.35)
and the frequencies of the normal mode are
′′
+−
==
22
12
,
kk kk
mm
ωω. (23.2.35')
There result thus two modes of symmetry. One of them is
12
0, 0QQ≠=, where
=−
21
xx, the particles oscillating in the same sense; the second mode of symmetry
(
12
0, 0QQ=≠, where =
21
xx) corresponds to the case in which the particles
oscillate in opposite senses.
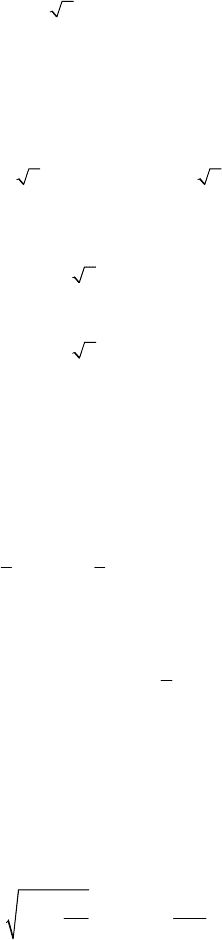
23.2.1.7 Case of Three Harmonic Oscillators
Let be now a discrete mechanical system formed of three harmonic oscillators of
equal masses
m , linked between them and at the ends by identical springs of elastic
constants
k (Fig. 23.19). We will make a direct study of this problem, in which – for
the sake of simplicity – we have chosen, as mentioned above, equal elastic constants.
Fig. 23.19 Problem of three harmonic oscillators of equal masses
The displacements of the masses from the position of equilibrium are
12
, xx and
3
x , so that we can write
()
()()
=++
=+−+−+
⎡⎤
⎣⎦
222
123
22
22
121 32 3
1
,
2
1
.
2
T xxx
m
Vkxxxxxx
m
(23.2.36)
MECHANICAL SYSTEMS, CLASSICAL MODELS
584
We obtain Lagrange’s equations
()
()
()
+−=
−−+=
−−=
2
112
2
2123
2
323
20,
20,
20,
xpxx
xpx xx
xpx x
,
(23.2.37)
where we have introduced the notation
=
2
/pkm. The characteristic equation is
22
22 2
22
20
det 2 0
02
pp
pp p
pp
λ
λ
λ
⎡⎤
−−
⎢⎥
⎢⎥
−−−=
⎢⎥
⎢⎥
−−
⎣⎦
,
(23.2.37')
which leads to the roots
11
22
33
2 2 0.766 ,
21.414,
221.848;
pp
pp
pp
ωλ
ωλ
ωλ
==−=
===
==+=
(23.2.38)
there correspond the proper modes
11 1121 11
31 1 1
12 222 32 22
13 332 3 33
33 3 3
cos( ), 2 cos( ),
cos( ),
cos( ), 0, cos( ),
cos( ), 2 cos( ),
cos( ).
xa t xa t
xa t
xa t x xa t
xa t x a t
xa t
ωϕ ωϕ
ωϕ
ωϕ ωϕ
ωϕ ωϕ
ωϕ
=−= −
=−
=− − = = −
=−=− −
=−
(23.2.39)
Using the results in Sect. 23.2.1.4, one can easily verify the orthogonality of these
proper modes.
By superposition, we obtain the general solution
=−−−+−
=−− −
=−+−+−
11 1 1 2 2 2 3 3 3
21 1 1 3 3 3
31 1 1 2 2 2 3 3 3
cos( ) cos( ) cos( ),
2 os( ) 2 cos( ),
cos( ) cos( ) cos( ).
xa t a t a t
xa t a t
xa t a t a t
ωϕ ωϕ ωϕ
ωϕ ωϕ
ωϕ ωϕ ωϕ
(23.2.39')
Denoting
′
=−
′
=−
′
=−
11 1 1
22 2 2
33 3 3
cos( ),
cos( ),
cos( ),
xa t
xa t
xa t
ωϕ
ωϕ
ωϕ
(23.2.39'')
Stability and Vibrations
585
we get the linear transformation
()
1123
212
3123
,
2,
.
xxxx
xxx
xxxx
′′′
=−+
′′
=−
′′′
=++
(23.2.39''')
The expressions (23.2.36) take the form
()
() ()
′′′
=++
′′ ′
=− +++
⎡⎤
⎣⎦
222
123
22 2
12 3
,
22 2 2 2 .
Tmxxx
Vk xx x
(23.2.36')
Lagrange’s system of equations becomes
()
()
′′
+− =
′′
+=
′′
++ =
2
11
2
22
2
33
22 0,
20,
22 0,
xpx
xpx
xpx
(23.2.37'')
being an uncoupled system; obviously, we find again the proper pulsations (23.2.38).
23.2.1.8 Small Oscillations with One Degree of Freedom
In the case of a discrete mechanical system with only one degree of freedom
(
= 1s ), corresponding to the generalized co-ordinate q , we have
== >
22
11
,,,0
22
TaqVbqab
;
(23.2.40)
we obtain the equation of motion
+= =
22
0,
b
qq
a
ωω ,
(23.2.41)
with the general solution
=−=− −>() cos( ), () sin( ), 0qt A t qt A t Aωϕ ω ωϕ ,
(23.2.41')
where the integration constants can be determined by the initial conditions
00
(0) , (0)qqqq== in the form
=+ =
2
00
2
0
2
0
,tan
qq
Aq
q
ϕ
ω
ω
.
(23.2.41'')
Obviously, the motion is given by a harmonic oscillation of pulsation
ω , which does
not depend on the initial conditions.
MECHANICAL SYSTEMS, CLASSICAL MODELS
586
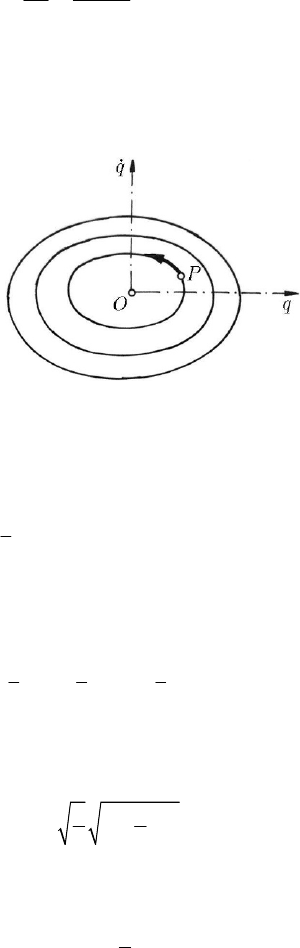
Eliminating the time
t between the relations (23.2.41'), we obtain a family of
ellipses
()
+=
22
22
1
qq
A
Aω
,
(23.2.41''')
in the phase plane (Fig. 23.20); these ellipses are concentric, of semi-axes
A and Aω ,
and are obtained from one of them by a dilatation of modulus
A . The representative
point
(,)Pqq describes counterclockwise the corresponding ellipse.
Fig. 23.20 Small oscillations with one degree of freedom
We supposed in (23.2.40) that
≠
22
d/d 0Vq ; to make vanish this derivative, we
choose
=∈>>
2
1
,,1,0
2
n
Vbqn nb` ,
(23.2.42)
so that the position
= 0q does correspond to a minimum of the potential energy. The
theorem of conservation of the mechanical energy leads to
+=
22
11 1
22 2
n
aq bq h ,
(23.2.43)
where
h is the energy constant, which may be determined by initial conditions. Hence,
we can write
=± −
2
1
n
hb
qq
ah
,
(23.2.43')
wherefrom it results
()
−<< = >
1/2
111 1
,,0
n
h
qqqq q
b
;
(23.2.43'')
Stability and Vibrations
587
the discrete mechanical system will oscillate between the positions which are symmetric
with respect to the stable position of equilibrium
= 0q , with the period
=
⎛⎞
−
⎜⎟
⎝⎠
∫
1
2
0
1
d
4
1
q
n
aq
T
h
q
q
.
(23.2.43''')
We mention that these oscillations are harmonic only in the particular case
= 1n
,
previously considered.
23.2.1.9 Small Oscillations with Two Degrees of Freedom
In the case of a discrete mechanical system with two degrees of freedom (
= 2s ), we
have
()
()
22
11 1 12 1 2 22 2
22
11 1 12 1 2 22 2
1
2,
2
1
2.
2
Taqaqqaq
Vbqbqqbq
=++
=++
(23.2.44)
We assume that
≠
11
0b , otherwise the form V is no more positive definite; in this
case, we can make the substitution
=− =
12
11 233
11
,
a
qq qqq
b
,
following to which the term
12
qq disappears from the expression of the potential
energy. We can thus consider
=
12
0b in the expression of this energy. One obtains
thus Lagrange’s equations
++=
++=
11 1 12 2 11 1
12 1 22 2 22 2
0,
0.
aq aq bq
aq aq bq
We pass to normal co-ordinates by relations of the form
′′ ′′
=+ =+
11111222211222
,qqqqqqαα αα,
(23.2.45)
where
=,, 1,2
ij
ijα , are real constants, which can be determined so as to obtain
()()
′′ ′′
=+ = +
22 222
12 112
11
,
22
TqqV qq
ω ;
(23.2.44')
replacing (23.2.45) in (23.2.44) and identifying, we get the relations
MECHANICAL SYSTEMS, CLASSICAL MODELS
588
++=
++=
+++=
22
11 11 12 11 21 22 21
22
11 12 12 12 22 22 22
11 11 12 12 11 22 12 21 22 21 22
21,
21,
()0,
aa a
aa a
aa a
αααα
αααα
αα αα αα αα
(23.2.45')
+=
+=
+=
11 11 12 22 21 22
222
11 11 22 21 1
222
11 12 22 22 2
0,
,
.
bb
bb
bb
αα αα
ααω
ααω
(23.2.45'')
The last two relations (23.2.45') lead to
()
−
+=−
=−
11 22 22 11
11 22 12 21 11 12
12 22
2
11
11 22 12 21 11 12
22
,
.
ab ab
ab
b
b
αα αα αα
αααα αα
We can thus express the unknowns of the transformation (23.2.45) in the form
21 1 11 22 2 12
, kkαααα==, where
1
k and
2
k are the roots of the equation of second
degree
()
+− −=
2
12 22 11 22 22 11 12 11
0abk ab ab k ab ,
(23.2.46)
that is
()
⎡⎤
=− − ± − +
⎣⎦
2
2
1,2 1122 2211 1122 2211 121112
12 22
1
4
2
k abab abab abb
ab
.
(23.2.46')
We notice that
>
11 22
,0bb , the form V being positive definite; hence, the discriminant
of the equation is positive, the roots
1
k and
2
k being thus real. The two roots are of
different sign, let be – for instance –
12
0, 0kk<>. Replacing in the first two
relations (23.2.45'), we obtain
==
++ ++
22
11 12
22
22 1 12 1 11 22 2 12 2 11
11
,
22ak ak a ak ak a
αα
.
The kinetic energy being positive definite, we can state that
11 12
,αα are real quantities;
in this case, we can calculate also
21 22
,αα , which will be real quantities too.
The relation (23.2.45'') will give, finally, the pulsations, in the form
22
22 1 11 22 2 11
22
12
22
22 1 12 1 11 22 2 12 2 11
,
22
bk b bk b
ak ak a ak ak a
ωω
++
==
++ ++
;
(23.2.46'')
these quantities are real too, because the potential energy is positive definite. We are
thus led to the normal co-ordinates

Stability and Vibrations
589
′
=−=cos( ), 1,2
ii i i
qa t iωϕ ,
the amplitudes
12
,aa and the phase shifts
12
,ϕϕ being determined by the initial
conditions. Taking into account (23.2.46), (23.2.46'), we can calculate
()
()
−= − +
⎡
⎤
⎣
⎦
3/2
2
22 2
1 2 11 22 22 11 12 11 12
2
12 22
1
4ab ab abb
ab P
ωω
,
where we have denoted
()()
=++ ++
22
22 1 12 1 11 22 2 12 2 11
22Pak akaak aka
.
Obviously, this difference is positive, so that we can state
>
12
ωω; this result
corresponds to the signs chosen for
1
k
and
2
k
.
The generalized co-ordinates (23.2.45) will thus be given by
=−+−
=−+−
11111112222
22111122222
() cos( ) cos( ),
() cos( ) cos( ),
qt a t a t
qt a t a t
αωϕαωϕ
αωϕαωϕ
being a linear combination of the normal co-ordinates. We can assume that
>
11 12
,0αα ; in this case
21
0α < and >
22
0α . We can also write
=+ −
=− + −
1111122
22111222
() cos cos( ),
() cos cos( ),
qt A t A t
qt Aa t A t
ωωϕ
ωωϕ
(23.2.47)
where
=,, 1,2
ij
Aij
, are amplitudes (positive quantities) and where we have
conveniently changed the origin of the time, so that to appear a phase shift only in the
second normal co-ordinate.
If the two vibrations have the same direction, then one can make a study analogue to
that in Sect. 8.2.2.4 for the interference phenomena, the beats etc.
23.2.1.10 Methods to Determinate the Proper Pulsations
If the number of degrees of freedom of a discrete mechanical system is great, then
can appear difficulties in solving the secular equation; in this case, it is convenient to
use some approximate methods of calculation.
In the case of a discrete mechanical system, we start from the matric equation
(23.2.18), written in the form
−=KC MC
2
ω 0 .
(23.2.48)
Multiplying at the left by the transpose matrix
C
T
to obtain a scalar, it results
=
CKC
CMC
T
T
ω ;
(23.2.49)

MECHANICAL SYSTEMS, CLASSICAL MODELS
590
we can also write
==
==
=
∑∑
∑∑
11
11
nn
ij i j
ij
nn
ij i j
ij
kCC
mCC
ω
.
(23.2.49')
In the case of statically coupled discrete mechanical systems (
0,
ij
mij=≠), we
obtain
==
=
=
∑∑
∑
11
2
1
nn
ij i j
ij
n
ii i
i
kCC
mC
ω
.
(23.2.49'')
These formulae are exact; but we must know the proper forms of vibrations, hence the
coefficients
, 1,2,...,
i
Ci n= .
In Rayleigh’s method one introduces the generalized forces
=
==
∑
1
, 1,2,...,
n
iijj
i
Fkxi n;
replacing these forces by
ii
m and the displacements
j
x by the coefficients
j
C , it
results
1
, 1,2,...,
n
ii ij j
j
mkCi n
=
==
∑
.
Multiplying by
i
C and summing, we can write
===
=
∑∑∑
111
nnn
ii i ij i j
iij
mC kCC .
Finally, we get the approximate formula
=
=
=
∑
∑
1
2
1
n
ii i
i
n
ii i
i
mC
mC
ω ,
(23.2.49''')
where
i
C are the displacements produced by the generalized forces
i
F , numerically
equal to
ii
m .

Stability and Vibrations
591
Let us return to the case of three harmonic oscillators, considered in Sect. 23.2.1.7;
we have
11 22 33
, 0,
ij
mmmmm ij=== =≠, ===
11 22 33
2kkk k,
12 21
kk=
23
k=
32
kk==−, ==
13 31
0kk . The coefficients , 1,2,3
i
Ci= , will be given by
the system
−=−+ −=−+ =
12 1 23 2 3
222kC kC kC kC kC kC kC m
;
it results
13 2
3/2, 2/CC mkC mk== = . The formula (23.2.49''') leads to
==
10
0,767
17
k
p
m
ω ;
comparing with the minimal pulsation corresponding to the fundamental proper form
given by (23.2.38), we have an error of 1.31‰, hence a very good approximation.
If
≠Kdet 0 , then we can calculate
−
K
1
, and (23.2.48) leads to
−
==CCKM
21
,ωα α ;
(23.2.48')
we have always
≠Mdet 0 , so that
−
M
1
does exist and we can obtain analogously
−
==CC MK
21
,ωββ .
(23.2.48'')
Starting from (23.2.48) or from (23.2.48'), we can use a method of matric iteration. We
consider a column matrix
C
0
for the proper form; one of the mentioned formulae
allows us to calculate a matrix
C
1
a.s.o., till an approximation of order n , when the
forms
C
n
and
−
C
1n
are in direct proportion, with a good approximation. The formula
(23.2.48') leads to the fundamental proper form, corresponding to the smallest proper
pulsation, while the formula (23.2.48'') allows to calculate the fundamental proper form,
corresponding to the greatest proper pulsation. One can thus appreciate the spectrum of
the proper pulsations.
In the previously considered problem, we have
⎡
⎤
⎡⎤
−
⎢
⎥
⎢⎥
==−−
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
−
⎢⎥
⎢
⎥
⎣⎦
⎣
⎦
MK
20
00
00, 2
00
02
kk
m
mkkk
m
kk
,
so that
2
2
3/4 1/2 1/4
210
1
1/2 1 1/2 , 1 2 1
012
1/4 1/2 3/4
p
p
⎡⎤
⎡
⎤
−
⎢⎥
⎢
⎥
==−−
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
−
⎢⎥
⎢
⎥
⎣
⎦
⎣⎦
αβ
.