Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
572
, const, 1,2,...,
jj j
cc j s== =0a
;
is this case
(, ) (, )
j
jj j
kk
cc=Aa a Aa a ,
for any fixed
, 0kks<<. But
0, ,
(, )
0, ,
j
k
kj
kj
≠
⎧
⎪
=
⎨
>=
⎪
⎩
Aa a
so that
0, 1,2,...,
j
cj s== ; we can thus state that the amplitude vectors are linear
independent.
We impose Cauchy type initial conditions
0
1
0
1
(0) cos ,
(0) sin .
s
jj j
j
s
jjj j
j
C
C
ϕ
ωϕ
=
=
==
==
∑
∑
qaq
qaq
(23.2.13)
The vectors
j
a
being linear independent, we determine uniquely cos
j
j
C ϕ and
sin
j
jj
C ωϕ; because 0
j
ω ≠ , we obtain then the arbitrary constants
j
C and
j
ϕ (for
the latter constants, till a multiple of
2π ).
Hence, in the absence of multiple roots of the secular equation, the formula
(23.2.12') gives the general solution of the system of equations of motion (23.2.4').
Lagrange considered, erroneously, that in case of multiple roots appear solutions of
the form
()
()
2
... costt tωϕ
′′′
++ + −aa a
;
but Weierstrass showed further that to each root
λ of m th order of multiplicity one
can determine
m linearly independent amplitude vectors
k
a , the final solution being of
the same form (23.2.12').
The vibrations
cos( ), 1,2,...,
jj j j
Cjsωϕ−=a , are also called principal
vibrations of the discrete mechanical system.
23.2.1.3 Vibrations of a Discrete Mechanical System
In particular, we can assume that the system of equations of motion (23.2.4)
or (23.2.4') corresponds to a discrete mechanical system of particles. If this system has
only one degree of freedom, specified by the variable
x , we can write
2
(1/2)Tmx=
and
2
(1/2)Vkx= , where m is a mass, while k is a coefficient of elasticity.
In the case in which the mechanical system has
n degrees of freedom, by
generalizing, we can write
Stability and Vibrations
573
11 11
11
,
22
nn nn
ij i j ij i j
ij ij
T m xx V k xx
== ==
==
∑∑ ∑∑
,
(23.2.14)
where the variables
, 1,2,...,
i
xi n= , correspond to the degrees of freedom,
ij ji
mm=
are quantities of the nature of a mass, while
, , 1,2,...,
ij ji
kkij n== , are quantities
of the nature of a coefficient of elasticity. Introducing the matrix of inertia (the matrix
of masses) and the matrix of rigidity (the matrix of elastic coefficients)
11 12 1
11 12 1
21 22 2
21 22 2
12
12
...
...
...
...
,,
... ... ... ...
... ... ... ...
...
...
n
n
n
n
nn
nn
nn
nn
kk k
mm m
mm m
kk k
mm m
kk k
==MK
(23.2.15)
as well as the column vectors
1
1
2
2
,,
n
n
x
x
x
x
x
x
⎡
⎤
⎡⎤
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
==
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎢
⎥
⎢⎥
⎣⎦
⎣
⎦
#
#
xx
(23.2.15')
we can write
TT
11
,
22
TV==
xMx xKx
,
(23.2.14')
Lagrange’s equations taking the form
+=0
Mx Kx . (23.2.16)
The coefficients
,
ij ji
mmij=≠, if they are not null, are called coefficients of
dynamical coupling and the coefficients
,
ij ji
kkij=≠, if they are not zero, are
called coefficients of statically coupling. If
0,
ij
mij=≠, and if there exist
coefficients
0,
ij
kij≠≠, then the mechanical system is statically coupled. If
0,
ij
kij=≠ existing coefficients 0,
ij
mij≠≠, then the mechanical system is
dynamically coupled. If
0,
ij ij
mk ij== ≠ then the mechanical system is
uncoupled, each differential equation (23.2.16) having only one degree of freedom
(only one unknown function)
+==0, 1,2,...,
ii i ii i
mx kx i n ,
(23.2.16')
unlike the system (23.2.4). We assumed that
=, 1,2,...,ij n, in all the above
considerations.
MECHANICAL SYSTEMS, CLASSICAL MODELS
574
Starting from the solution
()
=−xCcos tωϕ
(23.2.17)
and using the results in the preceding subsection, one can state that the general solution
is obtained as a superposition of
n proper modes, depending on 2n constants of
integration, which are expressed by means of the initial positions
=
0
(0)
ii
xx
and of the
initial velocities
00
(0) , 1,2,...,
ii
xxi n== , in a Cauchy type problem. The column
vector
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
C
1
2
n
C
C
C
#
(23.2.15'')
is given by the linear and homogeneous matric equation
2
ω−=
⎡⎤
⎣⎦
0KMC,
(23.2.18)
which leads to the characteristic equation
−=
⎡⎤
⎣⎦
KM
2
det 0ω ;
(23.2.18')
to each eigenvalue
, 1,2,...,
i
inω = , will correspond a proper form of vibration C
i
,
of components
12
, ,..., , 1,2,...,
ii i
n
CC C i n= , having – in total – n such forms.
23.2.1.4 Proper Forms of Vibration
Let be two proper forms of vibration, denoted by “prime” and “second”. By writing
the equation (23.2.18) for the two cases, it results
2
2
,
;
ω
ω
′′ ′
−=
′′ ′′ ′′
−=
0
0
KC MC
KC MC
multiplying the first equation at the left by
′′
C
T
and the second one by
′
C
T
, we obtain
T2T
T2T
,
.
ω
ω
′′ ′ ′ ′′ ′
−=
′′′′′′ ′′
−=
0
0
CKC CMC
CKC CMC
The matrices
K and M are symmetric with respect to the principal diagonal; it results
that the scalars
′′ ′
CKC
T
and
′′ ′
CMC
T
are symmetric with respect to
,, , 1,2,...,
ij
CC ij n
′′
= , so that we can replace
′
C by
′′
C and
′′
C by
′
C . It results
′′′′′′′′ ′′ ′′
==
CKC CKCCMC CMC
TTT T
, .
Stability and Vibrations
575
We can thus write
()
22T
ωω
′′′′′′
−=
0CMC ;
but
′′ ′
≠
ωω, so that, finally
T
′′ ′
=
0CMC .
(23.2.19)
Analogously,
T
′′ ′
=
0CKC ,
(23.2.19')
obtaining thus the property of orthogonality of the proper modes. Developing these
relations, we get
== ==
′′′ ′′′
==
∑∑ ∑∑
11 11
0, 0
nn nn
ijij ijij
ij ij
mCC kCC .
(23.2.20)
If the mechanical system is statically coupled, then it results
===
′′′ ′′′
==
∑∑∑
111
0, 0
nnn
ii i i ij i j
iij
mCC kCC ,
(23.2.20')
while, if the system is dynamically coupled, we can write
== =
′′′ ′′′
==
∑∑ ∑
11 1
0, 0
nn n
ij i j ii i i
ij i
mCC kCC ;
(23.2.20'')
finally, if the discrete mechanical system is uncoupled, we have
==
′′′ ′′′
==
∑∑
11
0, 0
nn
ii i i ii i i
ii
mCC kCC .
(23.2.20''')
Let be
()
()
==
′′ ′ ′
−= −=
∑∑
2
11
cos , 1,2,...,
nn
ij j ij j
jj
mx mC t i nωωϕ ,
the forces of inertia corresponding to the “prime” mode, where we took into account the
displacements
cos( ), 1,2,...,
jj
xC t j nωϕ
′′ ′′
=−=
; if we consider also the
displacements
cos( ), 1,2,...,
jj
xC t j nωϕ
′′ ′′ ′′ ′′
=−=
, corresponding to the “second”
mode, and if we calculate the work of the mentioned forces of inertia, when they travel
through these displacements, with all their intensity, then we obtain

MECHANICAL SYSTEMS, CLASSICAL MODELS
576
()( )
==
′′′ ′ ′ ′′ ′′
=−−
∑∑
11
cos cos
nn
ij i j
ij
WmCCt tωϕ ω ϕ.
The orthogonality condition (23.2.20) (or, in particular, the condition (23.2.20'')) leads
to
= 0W
; (23.2.21)
we can thus state
Theorem 23.2.1 In the case of a discrete mechanical system of particles, the work of
the forces of inertia corresponding to a proper mode of vibration vanishes if they travel
through, with all their intensity, the displacements corresponding to another mode.
Observing that this work is equal to the variation of the kinetic energy, we can also
state
Theorem 23.2.1' In the case of a discrete mechanical system of particles there does not
take place a transfer of energy from a proper mode of vibration to another one.
23.2.1.5 Normal Co-ordinates
We state, without proof,
Theorem 23.2.2 (J. J. Sylvester). If A and B are two real and symmetric matrices
and if
A is positive definite, then it exists a non-singular real matrix S , so that
==SAS ESBS
TT
, Λ
,
(23.2.22)
where
E is the unit matrix and Λ is a diagonal matrix
=
1
1
0...0
0...0
... ... ... ...
00...
s
λ
λ
λ
Λ
,
(23.2.22')
the non-zero elements (the eigenvalues) of which are the roots of the equation
[
]
−=BAdet 0λ .
(23.2.22'')
We notice that
[]
()
[]
[]
()
[]
TT
2
T
det det det det det
det det det det det ,
λλ λ
λλ
−= − = −
⎡⎤
⎣⎦
=−=−
ES ASS AS
SS A S A
ΛΒ Β
ΒΒ
where
det ≠ 0S , the matrix S being non-singular; hence −Bdet[ ]λΛ vanishes
together with
− Edet[ ]λΛ .

Stability and Vibrations
577
The change of co-ordinates
1−
′
=
qSq
(23.2.23)
transforms the equation (23.2.4') in the form
′′
+=
qq0
Λ ,
(23.2.24)
to which – taking into account the above observation – corresponds a secular equation
with the same roots. We can thus state that Lagrange’s equations are invariant to the
point transformation (23.2.23), defined by the matrix
S , the form (23.2.24) being the
normal form, while the co-ordinates
′
j
q are normal co-ordinates. We mention that the
matrices
A and B are simultaneously diagonal if all the co-ordinates are normal,
hence if between the equations of motion there is not any coupling.
The solution of the system of equations (23.2.24) will be thus independent, of the
form
′′
=−=
qa( ) cos( ), 1,2,...,
jjjj
ttjsωϕ ,
(23.2.24')
Any independent normal co-ordinate
′
j
q
of (23.2.24') depends on the eigenvalues
j
λ , hence on the pulsation =
j
j
ωλ, on the proper form
′
a
j
and on the arbitrary
phase shift
j
ϕ ; by means of the arbitrary constants
′
j
C , we obtain the general solution
()
=
′′
=−
∑
qa
1
() cos
n
j
jjj
j
tC tωϕ,
(23.2.24'')
corresponding to the solution (23.1.12'). We notice that this solution is general, even if
the characteristic equation has multiple roots.
We can thus state
Theorem 23.2.2 (Daniel Bernoulli). The permanent small motions of a discrete
mechanical system, subjected to holonomic and scleronomic constraints and to
conservative forces around a stable position of equilibrium can be obtained by the
superposition of a finite number of independent harmonic vibrations.
The kinetic energy and the potential energy can be expressed in normal co-ordinates
in the form
==
′′
==
∑∑
222
11
11
,
22
ss
jj
jj
TqV qω .
(23.2.3''')
There are two principal problems in the theory of oscillations: the determination of
the possible frequencies of the normal modes and the determination of the normal
co-ordinates as functions of the co-ordinates in which the problem has been initially
formulated. The frequencies are given by the secular equation (23.2.8'), while it is more
MECHANICAL SYSTEMS, CLASSICAL MODELS
578
difficult to obtain the normal co-ordinates, because one must determine the matrix
S
for the transformation (23.2.22). As a matter of fact, by the determination of the matrix
S one obtains also the frequencies of the normal modes directly from the relation
= SBS
T
Λ . In both problems, one must know all the masses of the particles, as well as
the constants which characterize the forces, that is the matrices
A
and
B
. From
symmetry considerations, we have the possibility to determine the limits of the number
of possible frequencies, the superior limit of the number of constants necessary to
specify
T and V , a partial factorization of the secular equation and the co-ordinates in
which the matrices
A and B are expressed in a reduced form (not necessary diagonal).
Let us suppose that one can find a matrix
≠DE
, of the same dimension as the
vector
q , so that
()
=∀Dq q q(),VV;
(23.2.25)
in this case, the configurations
q and Dq have the same potential energy. Because
()()() ()
===Dq Dq B Dq q D BDq q
T
TT
22VV
,
it results that
=DBD B
T
.
(23.2.26)
At the same time, the relations
()
() () ()
===Dq D Dq Dq q
2
()VV VV
,
take place and, replacing
q by
−
Dq
1
in (23.2.25), we get
()
1
()VV
−
=Dq q
, so that
the group
G generated by D lets invariant the potential V . The set of matrices D
which satisfy the relation (23.2.25) forms a representation of the group
G .
Let us suppose that the relation
=DAD A
T
is satisfied too, hence that the
Lagrangian (23.2.3''') is invariant with respect to the transformations of the group
G . If
the representation
D is orthogonal and completely reducible, having each irreducible
component orthogonal, then the equation (23.2.26) becomes
=BD DB , (23.2.26')
where
()()
(1)
T1
(2) ( ) ( ) T 1
,,
kk
−
−
⎡⎤
⎢⎥
⎢⎥
===
⎢⎥
⎢⎥
⎣⎦
%
D
DDDDDD
.
(23.2.27)
Stability and Vibrations
579
Be a permutation of the rows of the matrix
D (which is equivalent to a transformation
of similitude), we may group all the equivalent irreducible elements of the reduced form
(23.2.27) in the form
⎡⎤
⎢⎥
⎢⎥
⎢⎥
⎢⎥
=
⎢⎥
⎢⎥
⎢⎥
⎢⎥
⎢⎥
⎢⎥
⎣⎦
D
D
D
D
D
(1)
(1)
(2)
(2)
%
%
.
(23.2.27')
It results, from the relation (23.2.26'), that the matrix
B
commutes with the matrices of
the representation
D and, according to Schur’s lemma, must be of the form
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
B
BB
(1)
(2)
%
,
(23.2.28)
where
B
()k
is a submatrix of the same dimension as the block of all the matrices
D
()k
form (23.2.27'); as well, the matrix B
()k
must be given by
()
() ()
11 12
T
() ()
() () ()
21 22
() ()
...
... ,
... ... ...
, , 1,2,..., ,
kk
kk
kk k
kk
ij ji
ij s
ββ
ββ
ββ
⎡⎤
⎢⎥
⎢⎥
== =×
⎢⎥
⎢⎥
⎢⎥
⎣⎦
==
EE
BB EE Eβ
(23.2.28')
where we have put in evidence the Cartesian product of the matrix
()k
β
by the unit
matrix and where
()
T
() () () ()
dim , dim ,
kk k k
k
nc== =E
βββ
, while
()k
c shows
how many times is
D
()k
contained in D . As well,
⎡⎤
⎢⎥
⎢⎥
==×
⎢⎥
⎢⎥
⎣⎦
A
AAA E
(1)
(2) ( ) ( )
,
kk
%
α
,
(23.2.28'')
()k
α being a matrix; we obtain thus the secular equation

MECHANICAL SYSTEMS, CLASSICAL MODELS
580
[]
()
() ()
det det 0
k
n
kk
k
λλ
⎡⎤
−= − =
⎣⎦
∏
BA βα
.
(23.2.28''')
Hence, the number of the different frequencies is at the most equal to the number of the
irreducible components of the representation
D and the degeneration of each
frequency is at least equal to the dimension of the corresponding irreducible
component. Because the representation
D can be reduced by a real transformation, we
can assume that the transformed matrix
B
is real. Thus, the number of the real
constants necessary to can determine the matrices
A
and
B
is given by
()
=
+
∑
() ()
1
1
1
2
r
ii
i
cc ,
(23.2.29)
corresponding to the decomposition in a direct sum
⊕
=
∑
() ()ii
cDD.
(23.2.29')
If an irreducible component
∈
()k
DD
appears only once in (23.2.29'), then
A
()k
and
B
()k
are diagonal matrices, while the corresponding symmetry co-ordinates (in which
the representation
D is completely reduced) are normal co-ordinates.
Let be two systems of normal co-ordinates
′
q
and
′′
q
. Let us suppose that, in the
normal co-ordinates
′
q
, the matrices A and B have the form
⎡
⎤
⎢
⎥
===
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
A
AEB A
1
2
,
%
Λ ,
(23.2.30)
where each matrix
i
Λ
is a scalar matrix (which has only one element), with
,
ij
ij≠≠ΛΛ . If
1−
′′ ′
=
qRq
, then, in these co-ordinates, the matrices A and B
will be of the form
′
=
ARAR
T
and
′
=
BRR
T
Λ ; because the co-ordinates
′′
q
are
normal, so as to have
′
=AE
and
′
=B Λ
, the matrix R must satisfy the relations
==RR ER R
TT
, ΛΛ,
(23.2.31)
that is
[,]=−=0RRRΛΛΛ . It results that the most general form of the matrix R ,
which transforms a system of normal co-ordinates in another system of co-ordinates,
normal too, maintaining the order of eigenvalues in the matrix
Λ , is
⎡
⎤
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
S
RS
1
2
%
.
(23.2.31')
Stability and Vibrations
581
If the representation
D given by (23.2.29') is real, before taking the reduced form,
then we can suppose that it took this form by a real transformation, so that the matrices
()k
α and
()
k
β
of the relations (23.2.28'), (23.2.28'') must be real. Because these
matrices are symmetric, while
()k
α is positive definite, there exists a non-singular real
matrix
S
k
, so that =SSE
T() ()kk
kk
α and
T() () ()
,
kkk
kk
=SSbbβ being a diagonal
matrix. Hence,
()()
()()
××=×
××=×
SE A SE EE
SE B SE bE
T
()
T
()
,
,
k
kk kk kk
k
kk kk kk
(23.2.32)
if the rows of the Kronecker products are correspondingly ordered. We notice that the
system of co-ordinates
−
=QSq
1
is a system of normal co-ordinates for
k
k
⊕
=×
∑
SSE,
(23.2.32')
while
−
=SDS D
1
. In normal co-ordinates Q , the representation D is completely
reduced to irreducible components. The matrix (23.2.31') transforms each irreducible
component of
D is an equivalent irreducible component. Hence, all the systems of
normal co-ordinates for which
Λ is of the form (23.2.30) are systems of symmetry
co-ordinates.
The normal co-ordinates which correspond to different frequencies cannot be
transformed one into another because, if
j
Q is a normal co-ordinate, obtained by a
transformation, then
+=
2
0
jjj
QQω
, and if
′
j
Q is also a normal co-ordinate, obtained
by a transformation, then
′′
+=
2
0
jjj
QQω
and it is impossible to appear, in the
expression of
′
j
Q , other frequencies than /2
jj
f ωπ= .
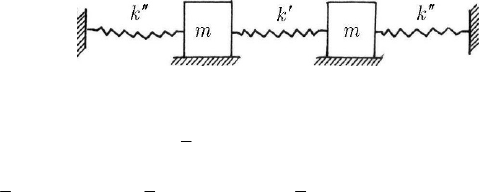
23.2.1.6 Case of Two Harmonic Oscillators
Let us consider a discrete mechanical system formed of two harmonic oscillators of
equal masses
m , linked at the ends by identical springs of elastic constants
′′
k , the
spring between them being of elastic constant
′
k (Fig. 23.18). The kinetic energy and
the potential energy of this system are
Fig. 23.18 Problem of two harmonic oscillators of equal masses
()
()
()
()
22
12
2
22 22
12 12 12 12
1
,
2
11 1
,
22 2
Tmxx
Vkxx kxx kxxkxx
=+
′′ ′ ′
=++−=+−
(23.2.33)