Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


Lagrangian Mechanics
31
while for the representative point
P we can write
()
==
==−
∑∑
33
2
2
11
11 11
22
nn
kkk
kk
kk
ZQMX
MM
κ
Φ
.
(18.1.65)
From the condition of minimum of the constraint in the real motion it results
δ=0Z ; because only the accelerations vary, we get
()
===
δ= δ =− δ =− − δ =
∑∑∑
333
111
1
0
nnn
kk k k k kk k
k
kkk
ZXQMXX
M
ΦΦ Φ
,
(18.1.66)
equation which can be identified with the equation (18.1.60'). Starting from this
equation and from the relations (18.1.58'), (18.1.58''), written in the form
=
δ= =
∑
3
1
0, 1,2,...,
n
jk k
k
bX j m
,
(18.1.67)
=
∂
δ= =
∂
∑
3
1
0, 1,2,...,
n
l
k
k
k
f
Xl p
X
,
(18.1.67')
respectively, and introducing Lagrange’s multipliers – on the same way as in the
previous subsection – we find the equations (18.1.42). We can thus state
Theorem 18.1.6 (theorem of the least constraint; C. F. Gauss). The motion of the
representative point
P
, subjected to ideal constraints in the space
3n
E
, takes place so
that the constraint
Z
of this point has a minimum for virtual variations of the
generalized accelerations (the generalized co-ordinates and the generalized velocities
are considered constant).
We can also say that, in the same conditions concerning the position, the generalized
velocities and the generalized accelerations, the first variation of the constraint
Z
of
the representative point must vanish (the constraint
Z
is stationary along the trajectory
of the representative point
P
).
We have seen that the demonstration of this theorem implies the theorem of virtual
work, being thus equivalent to Newton’s principle. Also the theorem of the least
constraint, stated by Gauss in 1829, can be considered as a principle (the principle of
the least constraint), because – starting from it – one can find again Newton’s equations
in case of ideal constraints.
H. Hertz considers that the given generalized forces, which act upon the mechanical
system
S , can be replaced by given constraints between this system and neighbouring
systems which act upon it; thus, he studies only mechanical systems which are not acted
upon by given generalized forces (
= 0
k
Q
). As well, to obtain a geometric
interpretation, he assumes that the generalized masses
k
M
are equal to unity (hence,
===
12 3
...
n
MM M
). Thus, it results
==
⎛⎞
==
⎜⎟
⎝⎠
∑∑
2
2
33
2
2
11
d
11
22
d
nn
k
k
kk
X
ZX
t
(18.1.68) .
MECHANICAL SYSTEMS, CLASSICAL MODELS
32
In case of a single particle, of co-ordinates
123
,,xxx, we have (we can assume, in
this case, that the mass
m is not equal to unity)
()
=++=a
222 2
123
22
mm
Zxxx
,
(18.1.69)
where
a is the acceleration in the considered motion; we obtain thus δ=δZaa. Using
Frenet’s frame of reference, we can write
=+
4
22
2
v
av
ρ
;
this sum of squares is minimal if
= 0v
(which takes place because the given force is
equal to zero and one assumes that the constraints are catastatic, so that
=d0
R
W ,
while the constraint force has no component along the tangent to the trajectory), hence
if the motion is uniform and if the curvature
1/ρ is minimal. Hence, the trajectory of
the point must be of minimal curvature (as near as possible to a straight line).
In case of a discrete mechanical system
S , of representative point P , we can
express the kinetic energy in the form (with the above considerations)
()
==
⎛⎞
== ==
⎜⎟
⎝⎠
∑∑
2
2
33
22
11
d
11 1d1
22d2d2
nn
k
k
kk
X
s
TX s
tt
,
where
=+++
222 2
12 3
d d d ... d
n
sXX X is the square of the arc element in the space
3n
E . Because there are not generalized forces and assuming that to constraints are
catastatic (
=d0
R
W ), it results that = const.T As we can notice,
==
⎛⎞
===
⎜⎟
⎝⎠
∑∑
2
2
33
2
11
dd dd
,1, 0
dd d
d
nn
kk kk
k
kk
XX XX
Xs
ss s
s
,
so that
=+
2
2
2
dd
d
d
kk
k
XX
Xss
s
s
;
in the mentioned conditions, we have
==0sv
, hence the motion of the
representative point on its trajectory is uniform. We can thus replace the quantity
Z by
the quantity
()
== =
== =
∑∑ ∑
r
2
2
3
22
2
11 1
d
d
d
d
nn n
ki
i
ki i
X
KK
s
s
,
(18.1.70)
where we define by
K the curvature of the path travelled through by the system (in a
certain sense, a measure of the curvatures of the paths of all the particles
i
P
which form
Lagrangian Mechanics
33
the system
S ); the minimum of the curvature K corresponds, obviously, to the
minimum of the constraint
Z . We can thus state
Theorem 18.1.7 (theorem of the least curvature; theorem of the most straight path;
H. Hetz). The motion of the discrete mechanical system
S , subjected to ideal
catastatic constraints, in the absence of the given generalized forces (in spontaneous
motion) and assuming a mass of equal generalized components, takes place, starting
from a given initial uniform motion, so that the curvature
K of the path travelled
through by the system be minimal, with respect to any other possible path (the path
travelled trough be the most straight possible one).
As in the preceding cases, we can consider this theorem as a principle (the principle
of least curvature or the principle of the most straight path). We mention that, because
of the conditions which are imposed, this principle is not so easy to apply; but the
connections to Lagrangian mechanics and to relativistic mechanics are interesting.
Starting from a constraint relation of the form
==
12 12
( , ,..., , , ,..., ; ) 0, 1,2,...,
nn
j
XX X XX Xt j mϕ
,
which is not necessarily linear in the generalized velocities, and effecting a total
derivative with respect to time, we obtain
=
∂∂
⎛⎞
++==
⎜⎟
∂
∂
⎝⎠
∑
3
1
0, 1,2,...,
n
jj
j
kk
k
k
k
XX j m
X
X
ϕϕ
ϕ
.
Varying only the accelerations, we find the relations
=
∂
δ= =
∂
∑
3
1
0, 1,2,...,
n
j
k
k
k
Xj m
X
ϕ
,
(18.1.71)
which are of the same form as the relations (18.1.67) (
=∂ ∂
j
j
kk
bXϕ
).
We can thus state that Gauss’s principle can be applied even if the kinetic constraint
relations are not linear in the generalized velocities, having thus a larger sphere of
applicability than the principle of virtual work (for which the mentioned relations must
be linear in the generalized velocities).
We remark that Jourdain’s principle has a position somewhat intermediary between
the d’Alembert-Lagrange principle and Gauss's principle.
18.1.2.4 Applications
Let be a particle P subjected to move on a deformable surface of equation
=
123
(,, ;) 0fx x x t (we use the notations in the space
3
E ); the constraint relation can
be written in the form
δ=
,
0
jj
fx . If we use the principle of virtual work in the form
δ=0
jj
x
Φ
(18.1.72)
and if we eliminate, e.g., the virtual displacement
δ
3
x
, then we get

MECHANICAL SYSTEMS, CLASSICAL MODELS
34
⎛⎞⎛⎞
−δ+−δ=
⎜⎟⎜⎟
⎝⎠⎝⎠
,1 ,2
131232
,3 ,3
0
ff
xx
ff
ΦΦ ΦΦ
.
To satisfy this relation for any virtual displacement δ
1
x and δ
2
x , the two brackets
must vanish, hence
==
,1 ,2 ,3
123
fff
ΦΦΦ
.
(18.1.73)
This result corresponds to that obtained in Sect. 6.2.2.2 by the method of Lagrange’s
multipliers.
Fig. 18.2 Motion of a particle on a fixed or movable or deformable sphere
In particular, let be a particle
P in motion on a sphere S , fixed or movable and
deformable
′′
−=rr
22
()
O
l , of centre
′′
=rr()
OO
t and radius = ()llt (Fig. 18.2).
Noting that
′′ ′′
−−=−rr rr
22
grad[( ) ] 2( )
OO
l , Lagrange’s equation of the first kind
is of the form
()
′′′
=−rrr
O
λ
, λ indeterminate scalar (we assume that the given
force is equal to zero); shifting the origin to the centre of the sphere, we can write the
equation of motion in the form
′
=−rrr
O
λ
,
′′
=−rr r
O
, too, with the constraint
=
22
rl, putting thus in evidence the complementary force of transportation
′
−r
O
of the
movable frame of reference (in general, non-inertial). By a vector product by
r and by
a scalar product by
r
, respectively, we get
()
′′
×=× = − ⋅
rr r r r r r r
22
ddd
,2
ddd
OO
ttt
λ
.
If
′
=
r0
O
(hence, if the movable frame is inertial, the centre of the sphere having a
rectilinear and uniform motion), then we have
×=rr C
, =C const
J
JJJJG
, wherefrom
0⋅=Cr and
=r
2
dd 2tllλ
; hence, the trajectory is a great circle of the deformable
sphere (the intersection of the plane
0⋅=Cr with the sphere). In particular, if the
radius
l of the sphere is constant, then the trajectory is a geodesic of it.
Let now be a particle
P which moves on a deformable curve of equations
=
123
(,, ;) 0
k
fxxxt , = 1,2k (in the space
3
E ); the constraint relations can be written

Lagrangian Mechanics
35
in the form
δ=
,
0
j
kj
fx ,
= 1, 2k
. Associating the condition (18.1.72) and eliminating
the virtual displacements, we obtain
=
133
1,1 1,2 1,3
2,1 2,2 2,3
0fff
fff
ΦΦΦ
,
(18.1.74)
relation which – together with the constraint relations – allows to determine the motion
of the particle (see Sect. 6.2.2.1 too, where Lagrange’s multipliers are used).
Fig. 18.3 Motion of a particle on a movable circle of variable radius
Let us study, in particular, the motion of a particle
P on a circle C , movable and of
variable radius, represented by the intersection of the above considered sphere
S with
the plane
′′
⋅− =
rr()0
O
α , = ()tαα, which passes through
′
r
O
and is normal to α
(Fig. 18.3). As in the preceding case, in the absence of the given force, we can write the
equation of motion in the form
′
=+ −
rr r
12
O
λλ
α ,
12
,λλ indeterminate scalars,
′′
=−
rr r
O
, with the constraint relations =
22
rl, =0⋅ rα . By a vector product by
r and successive scalar products by r
and α , respectively, we get
()
′
×= ×+
rr r r
2
d
d
O
t
λ
α ,
′
=−⋅+⋅
rrrrr
22
12
dd
22
dd
O
tt
λλ
α ,
⋅= −⋅
rr
2'
2
O
λ
ααα.
If
= const
J
JJJJG
α (hence, if the circle C is in a plane of fixed direction), then we have
⋅=r 0
α , ⋅=r 0
α too (according to the constraint relations). Thus, it results
′
=⋅
r
2
2
O
λ
α
α ,
hence the component
2
λ α normal to the plane ⋅=r 0α , of the constraint force (the
component contained in the plane is
r
1
λ ). If
′
=
r
O
0
(the movable frame of reference
MECHANICAL SYSTEMS, CLASSICAL MODELS
36
is inertial), then the constraint force is contained in the plane of the circle, which has a
fixed orientation.
Let be two particles
1
P and
2
P of masses
1
m and
2
m and position vectors r
1
and
r
2
, upon which act the given forces F
1
and F
2
, respectively; we assume a constraint
relation at distance of the form
−=rr
22
12
()l , = ()llt, which can be written as
−⋅δ−−⋅δ=rr r rr r
12 1 12 2
() () 0. The principle of virtual work is written in the
form
⋅δ + ⋅δ =rr
11 22
0ΦΦ , being thus led to Lagrange’s equations of the first kind
() ()
+−= −−=rr rr
112 212
,λλ00ΦΦ.
(18.1.75)
We obtain thus
+=
12
0ΦΦ . Assuming that =+FgF
1112
m , =+FgF
2221
m ,
=gg()t , where F
12
and F
21
are internal forces ( +=FF
12 21
0 ), it results
+=+rr g
11 22 1 2
()mm mm
, wherefrom
()
+=+ ++
∫∫
rr CC
11 22 1 2 1 2
00
d()d
t
mm mm g t
τ
τττ
,
with
=CC
12
,const
J
JJJJG
; hence, the centre of mass C has a motion of acceleration g()t ,
being situated on the segment of a line
12
PP , so that
===
++
21
12 12
12 12
,,
ml ml
CP CP l P P
mm mm
.
The particles
1
P and
2
P will be at any moment on two concentric spheres of radii
1
CP and
2
CP , respectively (hence, remains to be studied the problem of motion of a
particle on a given sphere). In the particular case of two heavy particles, the mass centre
C will describe a parabola situated in a vertical plane and having a vertical axis; the
particles will be in a plane of fixed orientation, their motion with respect to the centre
C taking place after the law of areas.
The analytic methods of computation have been developed, especially, in case of
discrete mechanical systems; however, they can be applied successfully also to
problems concerning continuous mechanical systems. We consider thus a perfectly
flexible, inextensible and non-torsionable thread, of given length
l , fixed at the points
0
P and
1
P , acted upon by forces p()s on unit length. The principle of virtual work is
written in the form
()
q
⋅δ = = −
∫
rpa
12
d0,
PP
s μΦΦ,
(18.1.76)
where
()sμ is the linear density, while a()s is the acceleration of an arbitrary point
P . The relation = r
22
d(d)s leads to δ=⋅δrr
22
d(d)d (d)ss ; because the thread is
inextensible, we have
δ=(d ) 0s , so that the constraint relation (which takes place for
all the elements of arc) is written in the form
Lagrangian Mechanics
37
()
⋅δ =
r
r
d
d0
ds
.
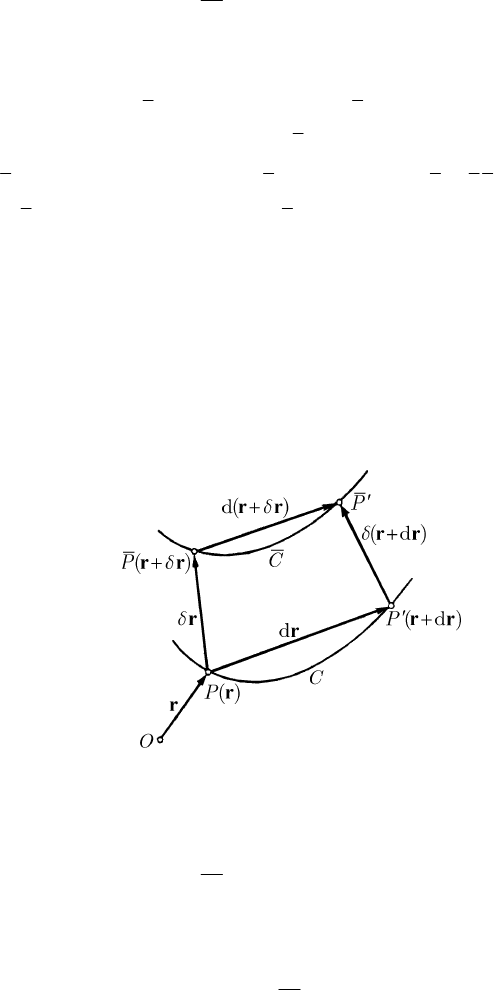
Starting from the points
P
of the curve
C
and considering a given system of virtual
displacements (at any point
P corresponds a virtual displacement δr at the moment
t ), we obtain the points
P
, which form the curve
C
. If r()P and
′
+
rr(d)P are two
neighbouring points on the curve
C and +δrr()P is a corresponding point on the
curve
C , one can reach the point
′
P
on the path
′
+PP PP
J
JJG JJJJG
or on the path
′′′
+PP P P
J
JJJG
J
JJJG
(Fig. 18.4); hence, the point
′
P
can be specified by
+δ+ +δ=+ +δ+rr rrrr rrd( ) d ( d ) ,
wherefrom
δ=δrrd( ) (d ) , so that the two operators are linked by the relation
δ=δdd.
(18.1.77)
Obviously, the considerations made above involve, at the most, holonomic
constraints; the relation of permutation (18.1.77) takes place just in such a case.
Fig. 18.4 Displacements of a particle laying on a curve
The constraint relation becomes
()
⋅δ=
r
r
d
d0
ds
,
so that Lagrange’s equation of the first kind will be
()
q
⎡⎤
⋅δ + ⋅ δ =
⎢⎥
⎣⎦
∫
r
rr
01
d
dd0
d
PP
s
s
λΦ .
Integrating by parts
MECHANICAL SYSTEMS, CLASSICAL MODELS
38
()
q
()
q
⋅δ= ⋅δ − δ⋅
∫∫
rr r
rr r
1
01 01
0
dd d
dd
dd d
P
PP PP
P
ss s
λ
λλ
and noting that
δr vanishes at the fixed points
0
P and
1
P , it results
()
q
⎡⎤
+⋅δ=
⎢⎥
⎣⎦
∫
r
r
01
d
dd 0
d
PP
s
s
λ
Φ .
Because this relation must take place for any virtual displacement
δr , we obtain
−=
rd
d
d
s
s
λ 0Φ ;
introducing the tension in the thread
==−
r
T
d
,
d
TT
s
λ ,
we can write
+=
Td
ds
0Φ ,
(18.1.78)
finding thus again the equation (12.2.10) of motion of the thread.
We present now some simple applications too, eventually with a practical character.
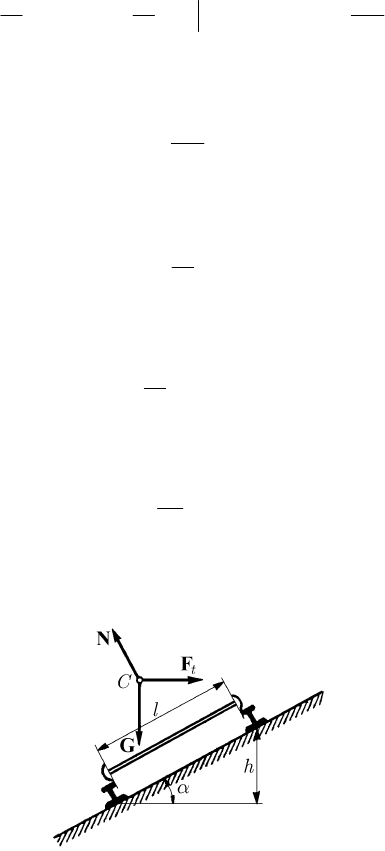
Fig. 18.5 Motion of a coach on a railway in a curved line
Let use consider a railway which, on a certain length, follows a curve of curvature
radius
ρ . D’Alembert’s principle, written for the mass centre C of a coach, in the
normal plane to the curve (Fig. 18.5), leads to
++ =GNF 0
t
, where G is the
weight of the coach,
N is the normal reaction of the ground, while
F
t
is the
transportation force of a non-inertial frame of reference (the centrifugal force), of
magnitude
Lagrangian Mechanics
39
=
2
t
mv
F
ρ
.
To can verify the equation of dynamic equilibrium, one must give to the ground an
inclination of angle
α , so that −=sin 0
t
NFα , −=cos 0NGα , whence
==
2
tan
t
F
v
Gg
α
ρ
;
the exterior rail must be superelevate to a height
=≅sin tanhl lαα
(
l
is the
clearance of the railway), so that
≅
2
vl
h
gρ
,
(18.1.79)
at an arbitrary point of the curve.
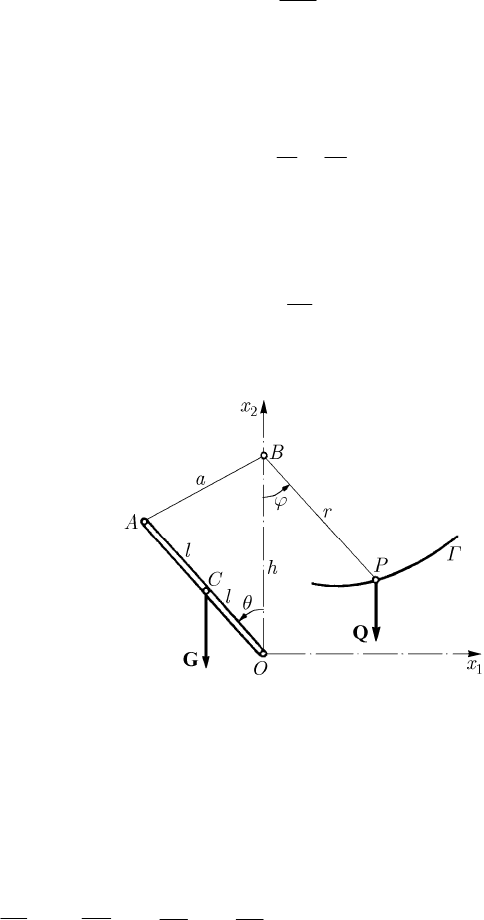
Fig. 18.6 Belidor’s crane bridge
Let be now a rigid bar
OA of weight G , which is rotating in a vertical plane, about
a fixed point
O
. A perfectly flexible, inextensible and non-torsionable thread, which
passes over a fixed pulley
B , situated on the vertical line of O , connects the point A
to a point
P , where is suspended a weight Q . One must find the locus of the point P
(a curve
Γ
), so that the bar AO be in indifferent equilibrium (Fig. 18.6). The bar AO
models Belidor’s crane bridge. We denote
n
n
====> = =2, , , , 0, ,OA l AB a BP r OB h h BOA OBPθϕ;
we choose
OB
as
2
Ox
-axis, the
1
Ox
-axis being horizontal, so that =
2
cos
C
xlθ ,
=−
2
cos
P
xhrϕ . The constraint relations are +=ar L, = ()rrϕ , where L is the
length of the thread. The mechanical system has only one degree of freedom and its
MECHANICAL SYSTEMS, CLASSICAL MODELS
40
position can be specified by the angle
ϕ . The principle of virtual work is written in the
form
−δ − δ =
22
0
CP
Gx Qx . We have
δ+δ=0ar ,
′
δ= δ()rrϕϕ
, =+−
222
44cosalhlhθ ,
hence
δ= δ2sinaa lh θθ; in this case
′
δ=− δ=−δ=δ= δ
2
sin ( )
222
C
aaa
xl a rr
hhh
θθ ϕ ϕ.
On the other hand,
[
]
′
δ=− δ+ δ= − δ
2
cos sin ( )sin ( )cos
P
xrrrrϕϕϕϕϕϕϕϕ
.
We obtain thus the condition of equilibrium
[]
′′
−+ − =() ()cos ()sin 0
2
Ga
rQr r
h
ϕϕϕϕϕ,
which determines the corresponding angles
ϕ . We get thus the differential equation
{
}
−
′
−+=
[()]
cos ( ) ( )sin 0
2
GL r
QrQr
h
ϕ
ϕϕ ϕϕ
.
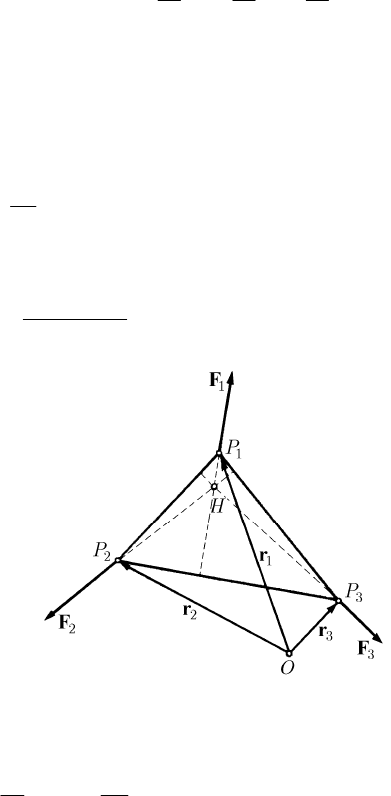
Fig. 18.7 Equilibrium of three particles acted upon by three forces in a particular case
By integration, we obtain
−+ =
2
() () ()cos const.
42
GPL
rrQr
hh
ϕϕϕϕ
Hence, the equation of the curve
r is of the form