Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


Lagrangian Mechanics
21
()
=+ =
d
, 1,2,...,3
d
kk k k
MX Q R k n
t
,
(18.1.38'')
corresponding to the form given to this principle by Newton. The Cauchy–Lipschitz
theorem, stated in Sect. 11.1.1.5 (where we have used adequate notations for the
generalized force) ensures the existence and the uniqueness of the solution.
Introducing the generalized forces of inertia
=− =, 1,2,...,3
i
kkk
QMXk n
,
(18.1.39)
the law of motion becomes
++= =0, 1,2,..., 3
i
kkk
QQR k n,
(18.1.40)
and we can state.
Theorem 18.1.1 (d’Alembert). The motion of the representative point
P
subjected to
constraints in the space
3n
E
takes place so that, at any moment, the point is in dynamic
equilibrium under the action of the given and constraint generalized force and of the
generalized force of inertia.
We introduce the lost generalized force of d’Alembert
=+=− =, 1,2,...,3
i
kkkk kk
QQQMXk n
Φ
.
(18.1.41)
In this case, the equations (18.1.40) become
+= =0, 1,2,..., 3
kk
Rk n
Φ
,
(18.1.42)
and we can state
Theorem 18.1.1' (d’Alembert). The motion of the representative point P subjected to
constraints in the space
3n
E takes place so that, at any moment, the constraint
generalized forces are equilibrated by the lost generalized forces of d’Alembert.
We notice that each of the Theorems 18.1.1 and 18.1.1' can be at the basis of the
Newtonian model, representing thus a differential principle of mechanics.
Formally, the equations (18.1.42), which represent the necessary and sufficient
conditions of dynamic equilibrium (characterizing, entirely, the motion of the
representative point
P subjected to constraints, hence of the dynamic discrete
mechanical system
S subjected to constraints), are not different from the relations
+= =0, 1,2,...,3
kk
QR k n
,
(18.1.42')
which represent the necessary and sufficient conditions of static equilibrium of the very
same representative point
P (hence, of the same mechanical system S ). Hence, all
the considerations which can be made in case of problems of statics can be transposed
to similar problems with a dynamic character, replacing the given generalized force
k
Q

MECHANICAL SYSTEMS, CLASSICAL MODELS
22
by the lost generalized force of d’Alembert
k
Φ
; as well, one observers that the results
concerning the problems of statics can be obtained by particularization, starting from
the general dynamic case.
If the momentum of the representative point
P is defined in the form
=
=
∑
3
1
,
n
kk
k
MX
H
(18.1.43)
then we can state a theorem of momentum
()
=
=+
∑
3
1
n
kk
k
QR
H
.
(18.1.43')
As well, if the moment of momentum, with respect to the origin
O , of the
representative point
P
, is given by
−+ −+ −+
==
=∈
∑∑
3
3( 1) 3( 1) 3( 1)
1,, 1
,
n
Ojkl
ililil
ijkl
MXX
K
(18.1.44)
where we have introduced Ricci's symbol, then the theorem of moment of momentum is
written in the form
−+ −+ −+
==
⎡
⎤
=∈ +
⎣
⎦
∑∑
3
3( 1) 3( 1) 3( 1)
1,, 1
n
Ojkl
il il il
ijkl
XQ R
K
.
(18.1.44')
Starting from these two theorems, we obtain – easily – the corresponding
conservative theorems too, hence two first integrals of the considered system of
differential equations. Taking into account the above observations, the equations
()
−+ −+ −+
===
⎡⎤
+= ∈ + =
⎣⎦
∑∑∑
33
3( 1) 3( 1) 3( 1)
11,,1
0, 0
nn
kk jkl
il il il
kijkl
QR X Q R
(18.1.45)
represent the necessary and sufficient conditions of rest of the representative point
P
with respect to a given frame of reference, in the case in which the discrete mechanical
systems
S is non-deformable.
The kinetic energy of the representative point
P is defined in the form
=
=
∑
3
1
1
2
n
kk
k
TMX
(18.1.46)
and we can write
=+dd d
R
TWW,
(18.1.47)
where the elementary work is given by (18.1.15) and (18.1.15'); we state thus

Lagrangian Mechanics
23
Theorem 18.1.2 (theorem of kinetic energy). The motion of the representative point
P
,
subjected to constraints in the space
3n
E
, takes place so that, at any moment, the
differential of the kinetic energy of thus point is equal to the elementary work of the
given and constraint generalized forces which act upon this point.
If we introduces also the powers of the given and constraint generalized forces in the
form
=
d
d
=,
dd
R
R
W
W
PP
tt
,
(18.1.46')
then the relation (18.2.47) becomes
=+
R
TPP
.
(18.1.47')
We can state
Theorem 18.1.2' (theorem of kinetic energy; second form). The motion of the
representative point
P , subjected to constraints in the space
3n
E , takes place so that,
at any moment, the derivative of the kinetic energy with respect to time of this point is
equal to the power of the given and constraint generalized forces.
In case of catastatic ideal constraints, the elementary work of the constraint
generalized forces vanishes (
=d0
R
W ; it will be shown in next section); hence
=dd.TW
(18.1.48)
If the given generalized forces derive from a simple or a generalized potential, then
=−ddWV, where =−VU in case of the simple potential and =−
0
VU in case of
the generalized potential. Introducing the mechanical energy
E , it results a mechanical
energy of the form
==+=,,constEhETVh .
(18.1.49)
We can state
Theorem 18.1.3 (conservation theorem of mechanical energy). The mechanical energy
of the representative point
P , subjected to catastatic ideal constraints in the space
3n
E , is constant in time only and only if the given generalized forces derive from a
simple or generalized potential.
We notice that, in the manifold whit
3n dimensions, =Vh represents the level of
energy of the motion; because
> 0T , it results that the representative point P moves
in the domain
<Vh.
If we represent the arbitrary generalized forces in the form (18.1.25), then it results
()
==
⎛⎞
+= − = −
⎜⎟
⎝⎠
∑∑
33
11
ddd d
nn
kk kk
kk
TV Q X Ut QV U t
,
(18.1.50)

MECHANICAL SYSTEMS, CLASSICAL MODELS
24
where
=−VU corresponds to a simple quasi-potential; if =
12
( , ,..., )
n
UUXX X is
a simple potential, then we can write
()
=
+=
∑
3
1
d
dt
n
kk
k
TV QV.
(18.1.50')
In the case of gyroscopic generalized forces we can write further a conservation
theorem of mechanical energy (of the form (18.1.49)), while if the forces are
dissipative, then the mechanical energy decreases.
18.1.2.2 Principle of Virtual Work. Lagrange’s Equations of the First Kind
We have seen that a discrete mechanical system S subjected to ideal constraints
verifies the relation (18.1.2); hence, a representative point
P
in the space
3n
E
is
subjected to ideal constraints if the relation (considered by P. Appell as relation of
definition)
=
δ= δ=
∑
3
1
0
n
Rkk
k
WRX
(18.1.51)
is verified. Starting from d’Alembert’s principle (18.1.42), effecting a scalar product by
the virtual generalized displacements
δ
k
X , summing for all indices and taking into
account the relation of definition (18.1.51) of the ideal constraints, we get the relation
()
==
δ= − δ=
∑∑
33
11
0
nn
kk k kk k
kk
XQMXX
Φ
,
(18.1.52)
which represents a necessary condition to describe the motion of the representative
point
P
. Assuming now that the condition (18.1.52) is fulfilled and that
p
holonomic
constraints of the form (18.1.11) and
m non-holonomic constraints of the form (18.1.7)
take place, we will use the method of Lagrange’s multipliers; we can thus write
== =
⎛⎞
∂
++δ=
⎜⎟
∂
⎝⎠
∑∑ ∑
3
11 1
0
p
nm
I
j
kI jkk
k
kI j
f
bX
X
λμ
Φ
,
where
, 1,2,...,
l
lpλ = , , 1,2,...,
j
jmμ = , are non-determinate scalars (Lagrange’s
multipliers) and where we took into account that one can invert the order of summation,
in a finite double sum. The
+pm constraints are linear and distinct, the matrix of the
coefficients
∂∂/
lk
fX and
j
k
b being of rank +pm; we express thus the virtual
generalized displacements
+
δδ δ
12
, ,...,
pm
XX X (we can always choose them so that
the determinant
+pm
Δ
of the respective coefficients in the constraints relations be
non-zero) by means of the other
−+3( )npm virtual generalized displacements,
where the latter ones can be considered as independent. We put the conditions that the

Lagrangian Mechanics
25
expressions in the brackets which multiply the first
+pm virtual generalized
displacements do vanish, determining thus, univocally,
+pmmultipliers
l
λ and
j
μ
(these multipliers are given by a system of
+pm linear equations with +pm
unknowns, of determinant
+
≠ 0
pm
Δ
).
The independent (and arbitrary) virtual generalized displacements
++
δ
1pm
X ,
++
δ
2pm
X , ..., δ
3n
X can be all taken equal to zero, expecting only one, let be δ
k
X ; this
non-zero virtual generalized displacement being arbitrary, it results that the bracket by
which it is multiplied must vanish too. Making, successively,
=+ +1kpm ,
=+ +2kpm , ...,
3n
, and taking into account the preceding considerations, it
results that all the brackets which multiply the virtual generalized displacements must
vanish. Finally, we can write
==
∂
++==
∂
∑∑
11
0, 1,2,...,3
p
m
I
j
kI jk
k
Ij
f
bk n
X
λμ
Φ
.
(18.1.53)
These equations are equivalent with the equations (18.1.42); in case of ideal
constraints, we can express the constraint generalized forces in the form
==
∂
=+=
∂
∑∑
11
, 1,2,...,3
p
m
I
j
kI jk
k
Ij
f
Rbkn
X
λμ ,
(18.1.54)
equivalent to (3.2.37). We can state (the relation (18.1.52) becomes a sufficient
condition too)
Theorem 18.1.4 (theorem of virtual work; d’Alembert-Lagrange). The motion of the
representative point
P , subjected to ideal constraints in the space
3n
E , takes place so
that the virtual work of the lost generalized forces of d’Alembert, which act upon this
point, vanishes for all the systems of virtual generalized displacements of the respective
point.
Taking into account the equivalence between the relation (18.1.52), which represents
the form taken by Newton's equations, it results that the theorem of virtual work can be
considered as being a principle (the principle of virtual work or the principle of virtual
generalized displacements), because – starting from it – one can solve the fundamental
problems of dynamics in case of ideal constraints. The equation (18.1.52) is called also
the basic equation (the first form), while the equations (18.1.53) are known as
Lagrange’s equations of the first kind.
Introducing the virtual generalized velocities
∗
k
V , we can write the conditions
(18.1.52) in the form
∗
=
=
∑
3
1
0
n
kk
k
V
Φ
(18.1.52')
too, the considered principle being thus called also the principle of virtual generalized
velocities.

MECHANICAL SYSTEMS, CLASSICAL MODELS
26
If some elements of the discrete mechanical system
S are rigid solids, then one
uses the formula (14.1.59) for the corresponding part of the virtual work.
In the static case, the principle of virtual work becomes
=
δ=
∑
3
1
0
n
kk
k
QX ,
(18.1.52'')
being stated for the first time in 1717 by Jean I Bernoulli.
Let be a mechanical system
S of n particles
i
P , of weight g
i
m , = 1,2,...,in;
choosing a co-ordinate axis
Ox along the descendent vertical, we can write the virtual
work of these given forces in the form
()
==
⎛⎞
δ= δ=δ =δ = δ=
⎜⎟
⎝⎠
∑∑
gg gg
11
0,
nn
ii ii
ii
Wmx mx M Mξξ
where
ξ is the applicate of the mass centre of the system S . We can thus state
Theorem 18.1.5 (E. Torricelli). A mechanical system subjected to ideal constraints and
to the action of its own weight is in equilibrium only and only for an extremum of the
applicate of its centre of mass.
Also this theorem can be considered to be a principle (Torricelli’s principle), which
may be applied for a certain sphere of problems (in case of a uniform gravitational
field). As we have seen in Sect. 4.1.1.7 (in case of a single particle), the position of
equilibrium is stable, labile or indifferent as the applicate of the mass centre has a
minimum, a maximum or is constant, respectively.
Using the expression (18.1.54) of the constraint generalized forces and the constraint
relations (18.1.6), (18.1.10), we can write the real elementary work (18.1.15') of the
constraint generalized forces, in case of ideal constraints, in the form
==
⎛⎞
=− +
⎜⎟
⎝⎠
∑∑
0
11
dd
p
m
jj
Rll
lj
Wfbtλμ
.
(18.1.55)
In case of catastatic constraints (we have
= 0
l
f
,
= 1,2,...,lp
, and =
0
0
j
b ,
= 1,2,...,lm), the real elementary work of the constraint generalized forces vanishes;
indeed, in this case the real generalized displacements belong to the set of virtual
generalized displacements, the relation (18.1.51) implying
=d0
R
W . The conditions
in which take place the relations (18.1.48) and (18.1.49) are thus entirely justified.
Starting from the relations (18.1.6), we can write the constraint relations with the aid
of the possible generalized displacements
Δ
k
X , = 1,2,...,3kn, in the form
=
Δ+ = =
∑
3
0
1
0, 1,2,...,
n
j
jk k
k
bX b j m.
(18.1.56)
Introducing the possible generalized velocities
Δ
==
Δ
, 1,2,...,3
k
k
X
Vk n
t
,

Lagrangian Mechanics
27
we can write
=
+= =
∑
3
0
1
0, 1,2,...,
n
j
jk k
k
bV b j m,
(18.1.56')
too. Let be also other possible generalized velocities
+Δ
kk
VV
, for the same position
of the representative point
,P
at the same moment t , so that
()
=
+Δ + = =
∑
3
0
1
0, 1,2,...,
n
j
jk k k
k
bV V b j m.
Subtracting the last two relations one from the other, it results
=
Δ= =
∑
3
1
0, 1,2,...,
n
jk k
k
bV j m
.
(18.1.56'')
Analogously, we can write
=
∂
Δ= =
∂
∑
3
1
0, 1,2,...,
n
l
k
k
k
f
Vl p
X
.
(18.1.56''')
Hence, these finite variations of the possible generalized velocities verify the relations
(18.1.7), (18.1.11) for virtual generalized velocities. One can thus write the basic
equation (18.1.52) in the second form
()
==
Δ= − Δ=
∑∑
33
11
0
nn
kk k kk k
kk
VQMXV
Φ
,
(18.1.57)
for a given position of the representative point
P , at a fixed moment t ; this form of the
equation plays an important rôle in case of the phenomenon of collision. If
Δ
k
V are
differential quantities, then these variations are virtual generalized velocities
(differences of possible generalized velocities) and we find again the form (18.1.52') of
the basic equation, as it has been shown by P. E. B. Jourdain, in 1908. The
corresponding principle is know also as Jourdain’s principle, being expressed in the
form
()
==
δ= − Δ=
∑∑
33
11
0
nn
kk k kk k
kk
XQMXX
Φ
.
(18.1.57')
By a total differentiation of the constraint relation (18.1.56') with respect to time, we
obtain the relations which must be verified by the possible generalized accelerations
=
kk
AV
,
= 1,2,...,3kn
, in the form

MECHANICAL SYSTEMS, CLASSICAL MODELS
28
=
⎡⎤
++==
⎢⎥
⎣⎦
∑
3
1
dd
0, 1,2,...
dd
n
jk jk
jk k k
k
bb
bA V j m
tt
,
(18.1.58)
where
=
∂∂
=+
∂∂
∑
3
1
d
d
n
k
k
k
V
tXt
.
(18.1.59)
We consider also the possible generalized accelerations
+Δ
kk
AA
for the same
position and the same velocity of the representative point
P , at the same moment t ; as
above, we obtain the relations
=
Δ= =
∑
3
1
0, 1,2,...
n
jk k
k
bA j m.
(18.1.58')
Analogously, it results
=
∂
Δ= =
∂
∑
3
1
0, 1,2,...,
n
l
k
k
k
f
Al p
X
.
(18.1.58'')
We see that the finite variations of the possible generalized accelerations verify the
relations (18.1.7), (18.1.11), corresponding to the virtual generalized displacements. We
are thus led to the third form of the basic equation
()
==
Δ= − Δ=
∑∑
33
11
0
nn
kk k kk k
kk
AQMXA
Φ
,
(18.1.60)
for a given position and generalized velocity of the representative point
P , at a fixed
moment
t . If
Δ
k
A
are differential quantities, as Gauss and Gibbs have considered, we
can write this equation in the form
()
==
δ= − δ=
∑∑
33
11
0
nn
kk k kk k
kk
XQMXX
Φ
,
(18.1.60')
where these variations are virtual generalized accelerations (differences of possible
generalized accelerations) .
18.1.2.3 Gauss’s Principle. Hertz’s Principle
Let us suppose that a particle
i
P , of mass
i
m , of the mechanical system S
subjected to constraints is, at the moment
t , at the position
i
P of position vector r
i
,
velocity
v
i
and acceleration a
i
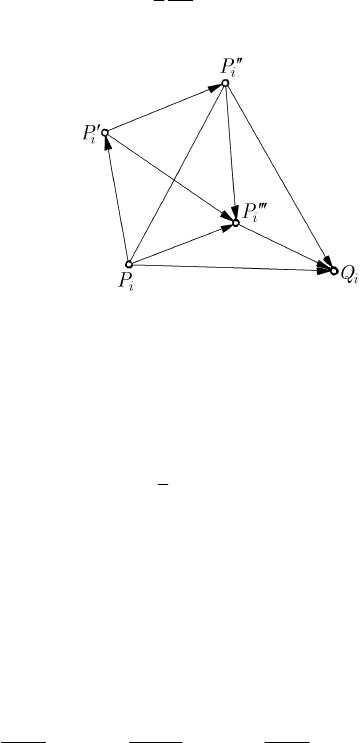
, = 1,2,...,in. If no force would act upon the particle
i
P
, then this one would effect the real displacement (Fig. 18.1)
Lagrangian Mechanics
29
′
=Δ
v
ii i
PP t
J
JJJJG
,
(18.1.61)
during the time
t , while if upon this one would act upon only the given force F
i
, then
the particle would effect the real displacement
′′
ii
PP
J
JJJJG
, so that the derivation of the
particle
i
P in this motion would be given by the formula (5.1.21) in the form
()
′′
=Δ
F
2
1
2
i
ii
i
PP t
m
J
JJJJG
.
(18.1.62)
Fig. 18.1 Gauss’s principle. Deviations
Finally, if the particle
i
P is acted upon both by the given and the constraint forces,
then it effects the real displacement
′′′
ii
PP
J
JJJJG
, in the time interval Δt ; the corresponding
deviation of the particle is
()
′′′
=Δ
a
2
1
2
ii i
PP t
J
JJJJG
,
(18.1.62')
collinear with the acceleration
a
i
. Let be also a possible displacement
ii
PQ
J
JJJG
, different
from
′′′
ii
PP
J
JJJJG
, effected in the same interval of time Δt .
We notice that
′′ ′′′
ii
PP
J
JJJJJG
and
′′
ii
PQ
J
JJJJG
represent the deviation of the particle
i
P from the
free motion, in the time interval
Δt to its real motion (the particle subjected to
constraints). Starting from the relation
′′ ′′ ′′′ ′′′
=+
ii ii ii
PQ PP PQ
J
JJJJG JJJJJJG JJJJJG
, we can write
== = =
′′ ′′ ′′′ ′′′ ′′ ′′′ ′′′
=++⋅
∑∑ ∑ ∑
222
11 1 1
2
nn n n
ii i ii i ii i ii i i i
ii i i
mPQ mPP mPQ mPP P Q
J
JJJJJG JJJJJJG
.
We may also write
′′′ ′′′
=−
ii ii ii
PQ PQ PP
J
JJJJG JJJJJJG
J
JJJJG
, hence as a difference between a
possible and a real displacement (which is a possible displacement too); hence,
'''
ii
PQ
J
JJJJG

MECHANICAL SYSTEMS, CLASSICAL MODELS
30
is a virtual displacement
δr
i
. On the other hand,
′′ ′′′ ′ ′′′ ′ ′′
=−
ii ii ii
PP PP PP
J
JJJJJG JJJJJJG JJJJJJG
; taking into
account (18.1.62), (18.1.62') and introducing the lost forces of d’Alembert of the form
(18.1.59), it results
()
()
()
== =
′′ ′′′ ′′′
⋅ =−Δ − ⋅δ =−Δ ⋅δ
∑∑ ∑
Far r
22
11 1
2
nn n
ii i i i i ii i i i
ii i
mPP PQ t m t
J
JJJJJG JJJJJG
Φ
.
Using the theorem of virtual work (in case of bilateral constraints) in the form
(11.1.63), we notice that this sum vanishes; if the constraints are unilateral, then the
relation (11.1.63'') takes place, the above sum being positive. As a conclusion, this sum
is non-negative in case of ideal constraints, so that
==
′′ ′′ ′′′
≥
∑∑
22
11
nn
ii i ii i
ii
mPQ mPP
J
JJJJG JJJJJJG
,
the equality taking place only if
′′′
≡
ii
QP.
Gauss takes as measure of the deviation of the particle
i
P from its free motion, in
the real or in a possible motion, the constraint
()
′′ ′′′
=
Δ
2
4
2
ii
ii
PP
Zm
t
,
or the constraint
()
′′′
=
Δ
2
4
2
ii
ii
PQ
Zm
t
,
respectively; in this case
==
≤= =
∑
∑
11
,,
nn
ii
ii
ZZZ ZZ Z.
(18.1.63)
Hence, among all the possible motions of the discrete mechanical system
S , the
real motion is that for which the constraint
Z
is minimal (any other possible constraint
Z is greater); but we notice that for all possible displacement must correspond the
same positions and the same velocities at the moment
t
, the accelerations being
different.
Taking into account the expression of the displacement
′′ ′′′
ii
PP
J
JJJJJG
, we can express the
constraint
Z in the form
()
==
==−
∑∑
Fa
2
2
11
11 11
22
nn
iii
ii
ii
Zm
mm
ι
Φ ,
(18.1.64)