Сивохин А.В. Мещеряков Б.К. Решение задач оптимального управления с использованием matlab и simulink
Подождите немного. Документ загружается.

191
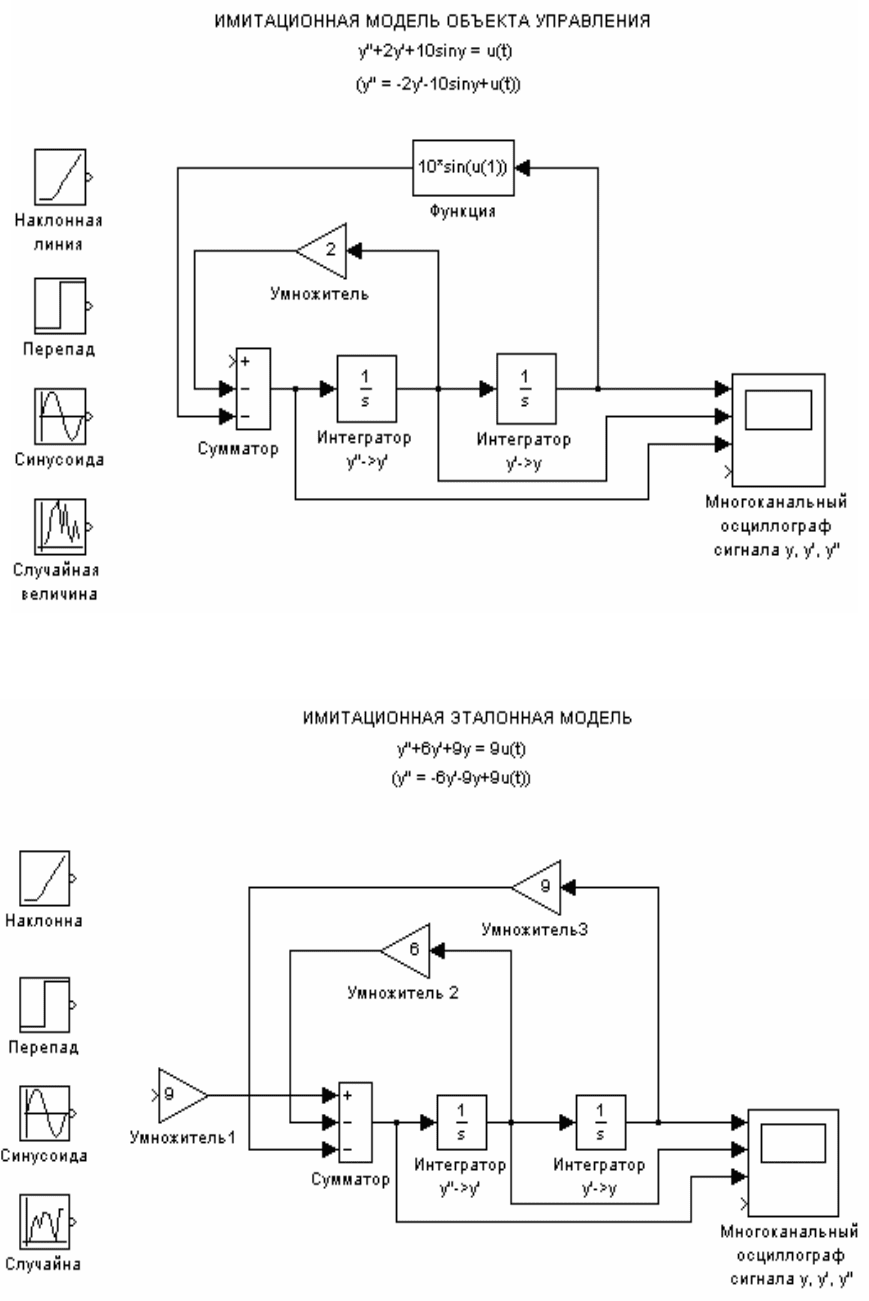
Рис. 10.1 Имитационная модель объекта управления
Рис. 10.2 Имитационная эталонная модель
192
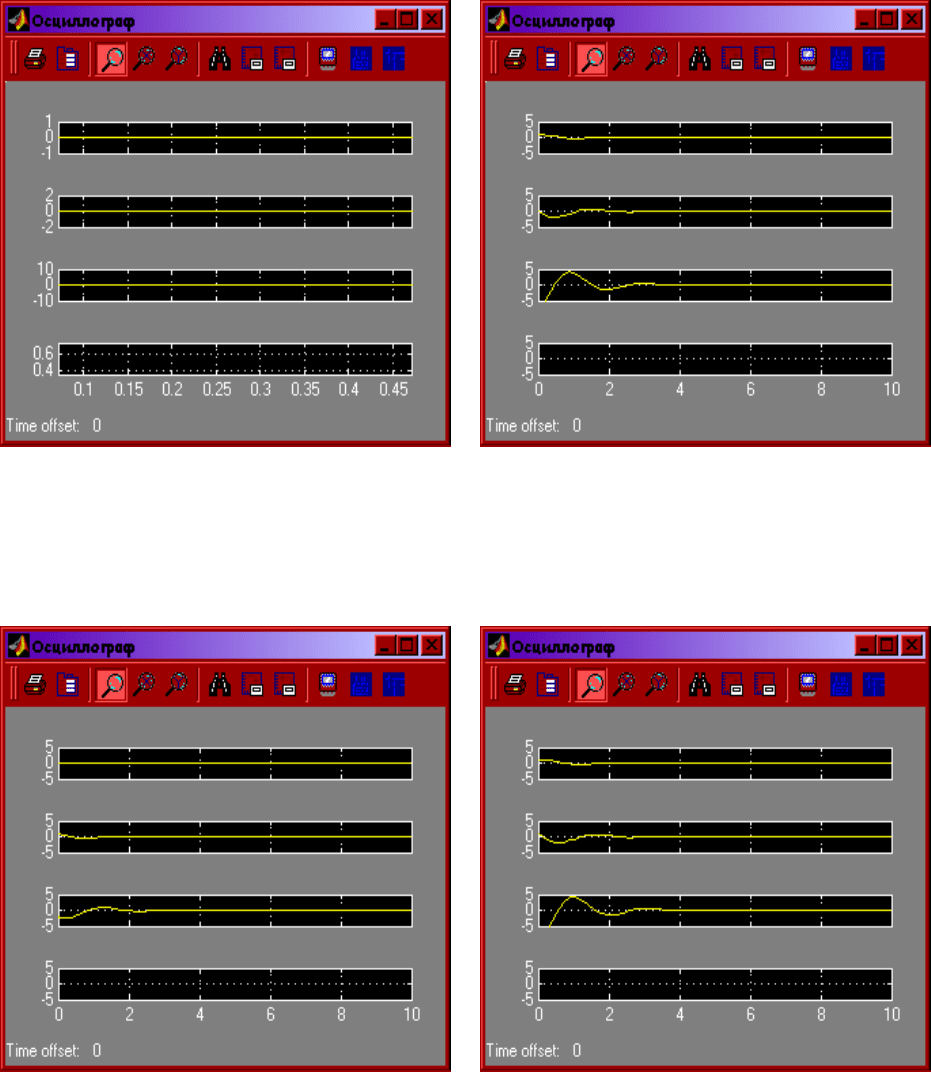
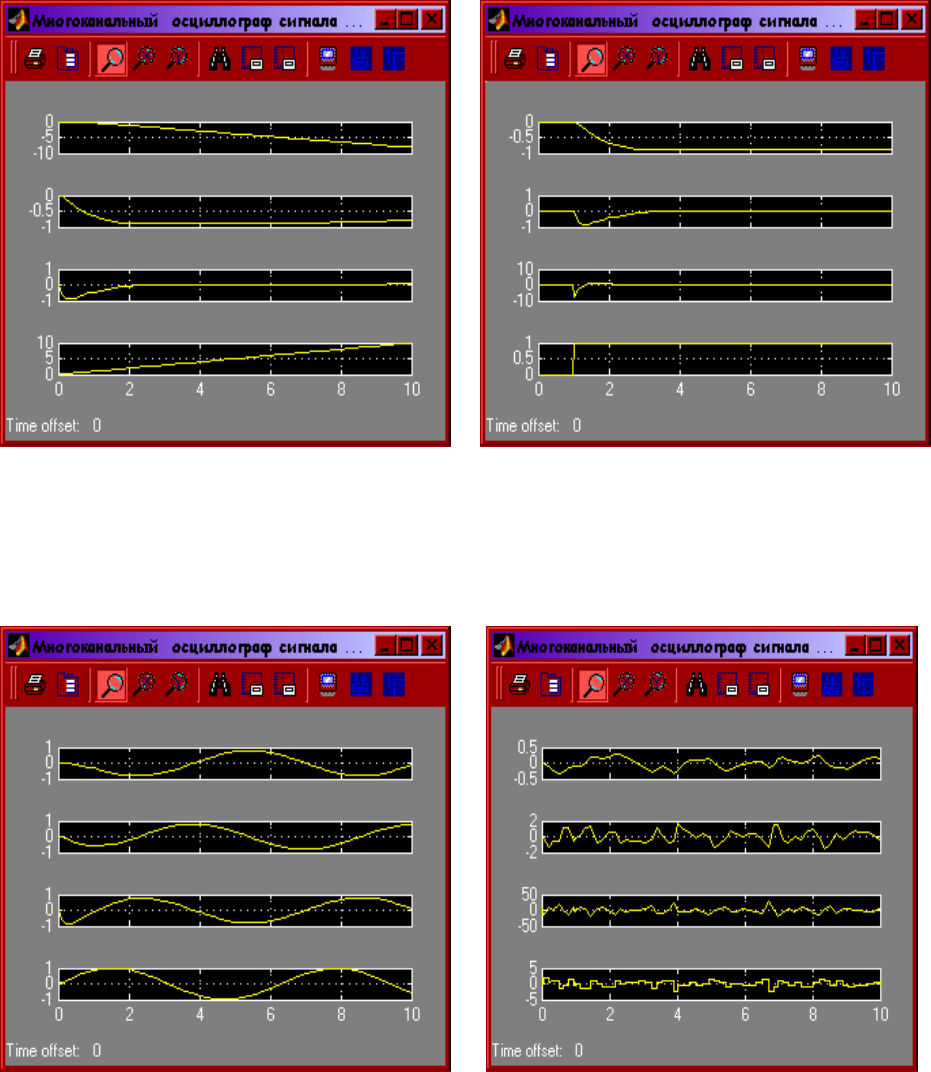
Рис 10.3 Свободные движения Рис 10.4 Свободные движения
объекта управления объекта управления
при y'(0) = 0 и y(0) = 0 при y'(0) = 0 и y(0) = 1
Рис 10.5 Свободные движения Рис 10.6 Свободные движения
объекта управления объекта управления
при y'(0) = 1 и y(0) = 0 при y'(0) = 1 и y(0) = 1
193
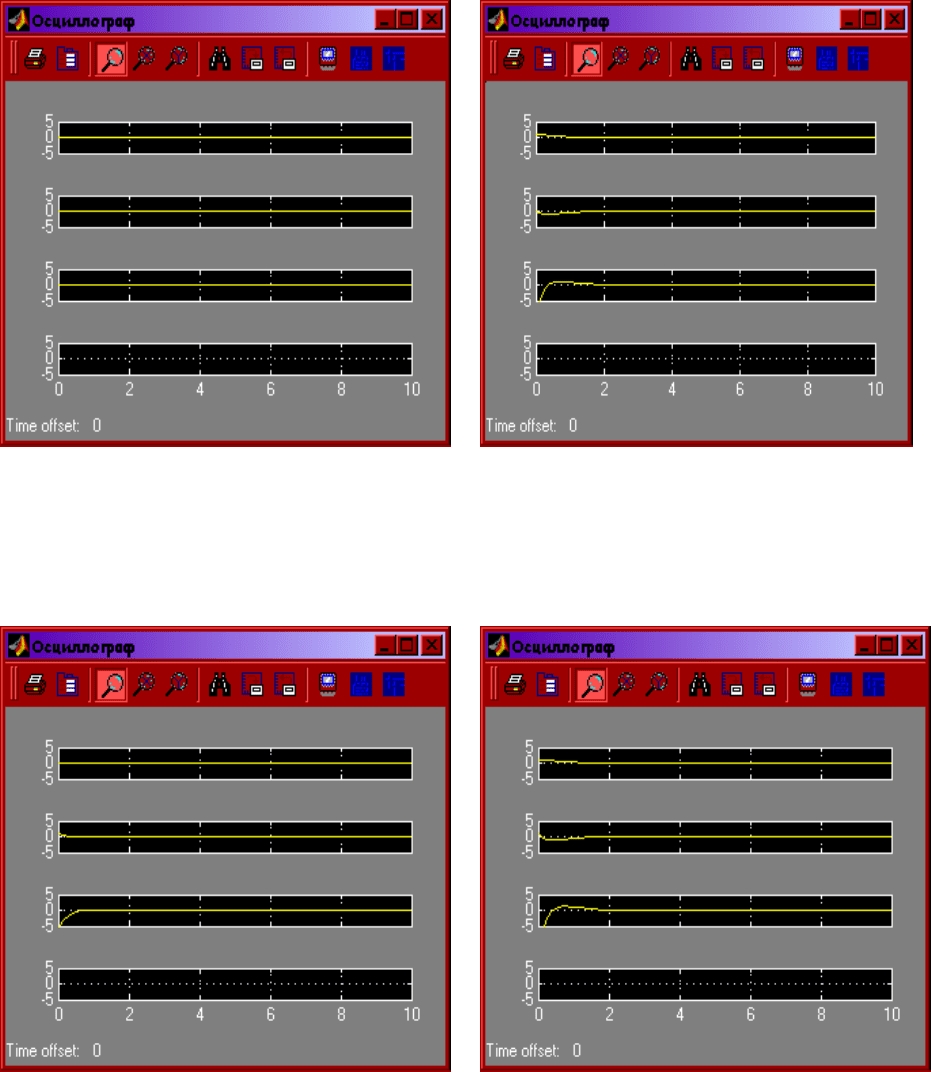
Рис 10.7 Свободные движения Рис 10.8 Свободные движения
эталонной модели эталонной модели
при y'(0) = 0 и y(0) = 0 при y'(0) = 0 и y(0) = 1
Рис 10.9 Свободные движения Рис 10.10 Свободные движения
эталонной модели эталонной модели
при y'(0) = 1 и y(0) = 0 при y'(0) = 1 и y(0) = 1
194
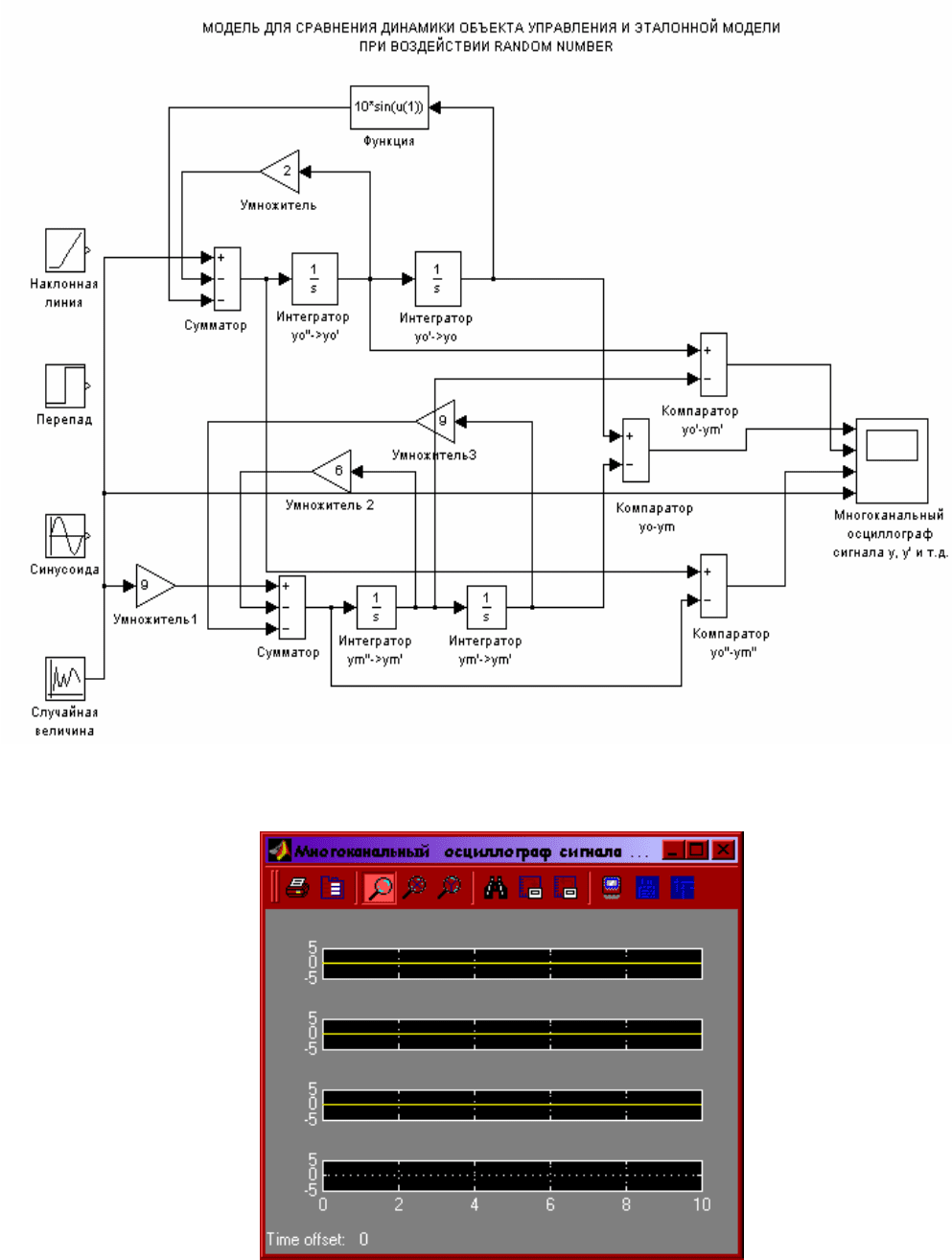
Рис. 10.11 Модель для сравнения динамики объекта управления и эталонной
модели при воздействии Random Number
Рис. 10.12 Сравнение динамики объекта управления и эталонной модели
при свободном движении
195
Рис. 10.13 Сравнение динамики объекта Рис. 10.14 Сравнение динамики объекта
управления и эталонной модели управления и эталонной модели
при воздействии Ramp при воздействии Step
Рис. 10.15 Сравнение динамики объекта Рис. 10.16 Сравнение динамики объекта
управления и эталонной модели управления и эталонной модели
при воздействии Sine Wave при воздействии Random Number
10.3 Проектирование нейрорегулятора с использованием
инструментальных средств системы MATLAB
Проектирование нейрорегуляторов для различных динамических систем
значительно упрощается благодаря наличию в пакете NNT (Neural Networks
Toolbox) специальных программных средств и системе имитационного
моделирования Simulink.
196
Для проектирования нейронных регуляторов на основе эталонной модели
запуск инструментальных средств производится исполнением команд
mrefrobotarm (без нормализации данных) или mrefrobotarm2 (с нормализацией
данных) и затем активизацией блока Model Reference Controller двойным щелчком
левой кнопки мыши. В результате появляется диалоговая панель Model Reference
Controller, которая позволяет определить архитектуру нейронной сети регулятора
и произвести ее обучение. Однако, без идентификации
объекта управления
синтезировать нейрорегулятор невозможно. Поэтому необходимо открыть другую
панель Plant Identification (идентификация механизма), щелкнув по кнопке Plant
Identification.
Диалоговая панель для идентификации управляемого процесса Plant
Identification входит в состав раздела Control Systems библиотеки нейронных
блоков системы Simulink, является универсальным средством и может быть
использована для построения нейросетевых моделей любых динамических
объектов, которые могут быть представлены блоками этой системы
.
С помощью управляющих элементов панели Plant Identification можно задать
архитектуру нейронной сети, параметры обучающей последовательности и
параметры обучения, а также управлять процессом идентификации и оценивать
качество этого процесса.
Набор управляющих элементов для задания архитектурных параметров
нейронной сети следующий:
1.
Size of the Hiden Layer – количество нейронов во входном, или скрытом слое;
2.
No. Delayed Plant Inputs – число задержек для входного слоя;
3.
No. Delayed Plant Outputs – число задержек для выходного слоя;
4.
Samling Interval – интервал квантования или шаг дискретности, в секундах,
между двумя последовательными моментами отсчёта данных;
5.
Notmalize Training Data – переключатель нормирования для преобразования
обучающих данных к диапазону [0 1].
Набор управляющих элементов для задания характеристик обучающей
последовательности таков:
1.
Training Samples – число точек отсчёта для получения обучающей
последовательности в виде пар значений вход-выход для управляемого процесса,
определяемого моделью Simulink;
2.
Maximum Plant Input – максимальное значение входного сигнала;
3.
Minimum Plant Input – минимальное значение входного сигнала;
4.
Maximum Interval Value (sec) – максимальный интервал идентификации (в
секундах);
5.
Minimum Interval Value (sec) – минимальный интервал идентификации (в
секундах);
6.
Limit Output Data – переключатель для ограничения значений выходного
сигнала;
7.
Maximum Plant Output – максимальное значение выходного сигнала,
задаваемое при включённом переключателе Limit Output Data;
197
8. Minimum Plant Output – максимальное значение выходного сигнала,
задаваемое при включённом переключателе Limit Output Data;
9.
Simulink Plant Model – для задания модели управляемого процесса,
реализованной с помощью блоков Simulink, имеющей порты входа и выхода и
сохранённой в файле *.mdl; выбор модели производится с помощью кнопки
Browse; имя модели отображается в специальном окне.
Параметры обучения задаются следующим образом:
1.
Training Epochs – количество циклов обучения;
2.
Training Function – для задания обучающей функции;
3.
Use Current Weights – переключатель для использования текущих весов
нейронной сети;
4.
Use Validation Data – переключатель для использования контрольного
множества в объёме 25
% от обучающего множества;
5.
Use Testing Data – переключатель для использования тестового множества в
объёме 25
% от обучающего множества.
Для идентификации управляемого процесса необходимо выполнить следующие
действия:
1.
Задать архитектуру нейронной сети, которая будет моделью управляемого
процесса.
2.
Задать параметры обучения.
3.
Выбрать модель Simulink для управляемого процесса.
4.
Сгенерировать обучающую последовательность заданного объёма, запустив
модель Simulink с помощью кнопки Generate Training Data. Генерация обучающей
последовательности производится с помощью воздействия ряда ступенчатых
сигналов на модель управляемого процесса и снятия значений на входе и выходе
модели через каждый шаг квантования. Графики входного и выходного сигнала
отображаются в окне Plant Input
-Output Data.
5.
По завершении генерации обучающей последовательности необходимо либо
принять эти данные, нажав на кнопку Accept Data, и тогда они будут
использованы для обучения нейронной сети, либо отвергнуть их, нажав кнопку
Reject Data, и повторить процесс идентификации управляемого процесса,
представленного моделью Simulink.
6.
После получения обучающей последовательности необходимо установить
требуемые параметры обучения и с помощью кнопки Train Network запустить
процесс обучения нейронной сети.
7.
После завершения обучения его результаты отображаются на графиках
изменения ошибки сети для обучающей, контрольной и тестирующей
последовательностей, а также в окне выходных значений модели и сети при
подаче на вход указанных последовательностей.
8.
Если результаты обучения приемлемы, то надо сохранить параметры
нейросетевой модели управляемого процесса и приступить к синтезу регулятора
того или иного класса, нажав кнопки Apply
и Ok.
198
9. Если результаты обучения неприемлемы, то следует нажать кнопку Cаncel и
повторить процесс идентификации сначала, изменяя архитектуру сети и
параметры обучающей последовательности.
10.
Обучающую последовательность можно импортировать из рабочей области
или из файла, нажав на кнопку Import Data. Если необходимо обучающую
последовательность сохранить в рабочей области или в файле для подбора
параметров архитектуры нейронной сети, то следует после получения данных
нажать на кнопку Export Data.
11.
Если необходимо удалить только что сгенерированные данные, то следует
нажать кнопку
Erase Generated Data.
Таким образом, диалоговая панель Plant Identification позволяет
идентифицировать управляемый процесс, представленный в виде имитационной
модели Simulink, построить двухслойную нейронную сеть прямой передачи
сигналов с необходимым числом нейронов и линий задержки, обучить эту сеть
для получения нейронной модели управляемого процесса, оценить качество
обучения и работу нейронной сети.
Архитектура нейронной модели регулятора аналогична архитектуре нейронной
модели объекта, поэтому управляющие элементы на панели Model Reference
Control такие же, что и на панели Plant Identification
за небольшим
исключением. Так, на панели имеется кнопка для инициирования процесса
идентификации управляемого объекта Plant Identification, отсутствуют
управляющие элементы для задания характеристик выходного сигнала, так как он
непосредственно поступает на вход модели объекта, а обучающая
последовательность разбивается на сегменты, для чего имеется специальное поле
Controller Training Segments
.
Для синтеза регулятора необходимо определить все требуемые параметры на
панели, сгенерировать обучающие последовательности, нажав на кнопку Training
Data
и обучить нейронную сеть с помощью кнопки Train Controller, используя
текущие веса и режим обучения с накоплением (если необходимо). Затем нажать
на кнопку Apply для завершения процесса синтеза регулятора.
По окончании построения регулятора необходимо нажать на кнопку OK,
вернуться в окно Simulink
и выполнить моделирование работы системы
нейронного регулирования для оценки характеристик регулятора.
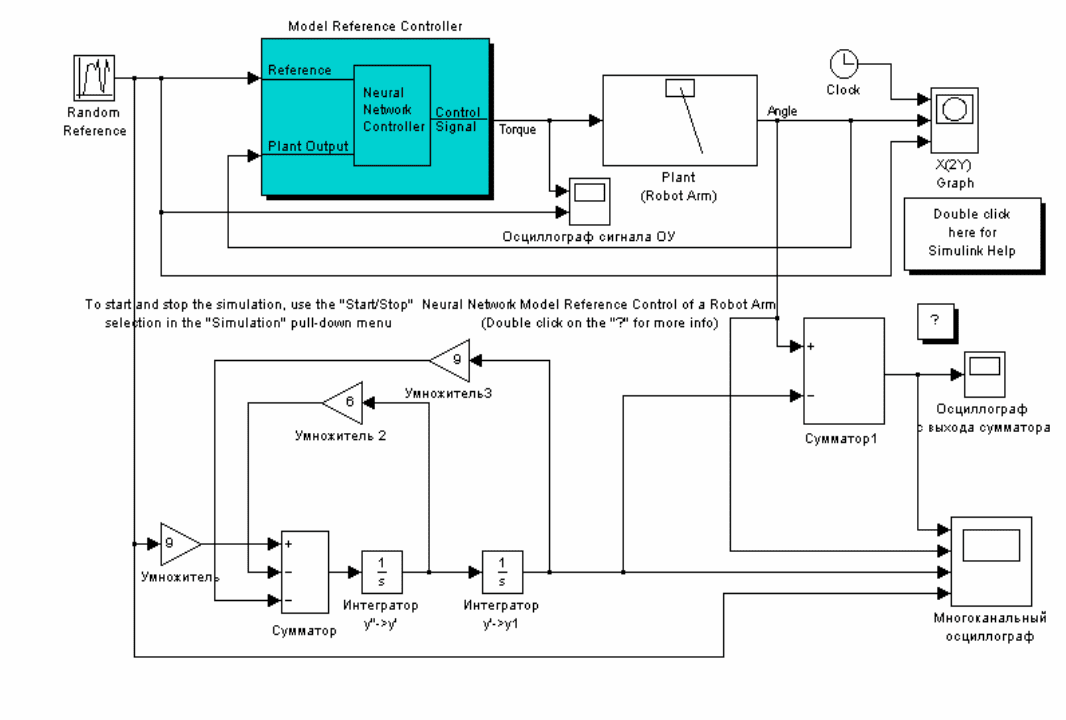
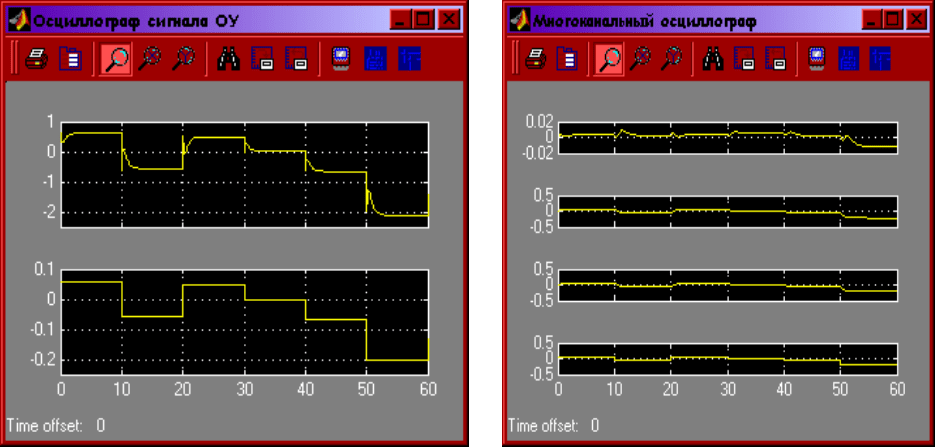
На рис. 10.17 представлена модель для оценки управляющего сигнала и
качества регулирования, на рис. 10.18 – сигнал внешнего воздействия и
управляющий сигнал, а на рис. 10.19 – сравнение выходных сигналов эталонной
модели и управляемого объекта.
199
Рис. 10.17 Модель для оценки управляющего сигнала и качества регулирования
200
Рис. 10.18 Сигнал внешнего воздействия Рис. 10.19 Сравнение выходных
и управляющий сигнал сигналов эталонной модели и
управляемого объекта
10.4 Программная реализация процедуры синтеза
нейрорегулятора
Для программной реализации этапов проектирования нейрорегулятора в
качестве нейронной модели, как для регулятора, так и для объекта будем
использовать двухслойные нейронные сети с прямой передачей сигналов.
Входной слой каждой сети имеет несколько нейронов, а функциями взвешивания,
накопления и активации являются соответственно dotprod, netsum и logsig.
Выходные слои для обоих случаев имеют такие же
функции взвешивания и
накопления, а функцией активации является для них линейная функция purelin.
Сети с такой архитектурой могут воспроизводить весьма сложные нелинейные
зависимости между входом и выходом.
Затем эти сети объединяются в одну сеть. Программно объединенная сеть
создается одной функцией newff. Два первых слоя исключаются из циклов
обучения с помощью признака learn, которому в
этих слоях задается значение 0, и
вся сеть, а точнее последние два слоя обучаются на наборах вход – выход,
полученных на этапе идентификации объекта с помощью имитационной модели и
блоков To Workspace. В результате обучения формируется модель объекта
управления. Для формирования модели регулятора объединенную сеть вновь
обучают, но уже на наборах вход – выход для
эталонной модели и выключенными
из процесса обучения двумя последними нейронными слоями. Так
осуществляется синтез нейрорегулятора.
Изменяя число нейронов в слоях, количество линий задержки на входе, между
слоями и в обратной связи, а также интервал квантования и объем обучающих
последовательностей, добиваются требуемой точности моделей.