Сивохин А.В. Мещеряков Б.К. Решение задач оптимального управления с использованием matlab и simulink
Подождите немного. Документ загружается.


161
()
,
2121
ukxxTTxTT
⋅
=
+
⋅
+
+
&&&
(8.1)
где
21
, TT и k – положительные постоянные.
Данное уравнение характеризует объект, состоящий из двух после-
довательно соединенных инерционных звеньев. Подобным уравнением
приближенно описываются многие объекты управления: двигатели постоянного
тока, управляемые генераторами, магнитными усилителями, электромашинными
усилителями; маломощные двигатели переменного тока, управляемые
магнитными усилителями, теплообменники и т. д.
Требуется найти алгоритм управления, переводящий объект из
положения x =
0, 0=
x
&
при t = 0 в положение x = х
n ,
0
=
x
&
за минимальное время; на
управляющее воздействие наложено ограничение
u
u
max
≤
. Определить момент
переключения t
1
, оптимальный переходной процесс
(
)( )
)(),( txtxtx
&
r
=
и время
перехода t
2
. По точкам построить графики )(),( txtx
&
. Для этого интервал времени от
0 до t
1
и интервал времени от t
1
до t
2
разделить на 5 равных частей и вычислить
значения x(t) и
)(tx
&
в соответствующих точках. В точке
1
tt
=
x(t) и )(tx
&
должны
рассчитываться дважды по разным формулам и эти значения должны совпадать.
Прежде чем приступить к поиску оптимального решения, необходимо
оценить характеристики объекта и устойчивость его состояния.
Теперь необходимо найти алгоритм оптимального управления для
следующих исходных данных: T
1
= 0.5; T
2
= 0.3; k = 2.15; u
max
= 127; x
n
=
236.
Обозначим
xxTx
+
⋅=
&
21
. (8.2)
Тогда
xxTx
&&&&
+
⋅=
21
. (8.3)
Умножая правую и левую части уравнения (8.3) на
1
T , получим
xTxTTxT
&&&&
⋅
+
⋅
⋅
=⋅
12111
. (8.4)
Из уравнения (8.1) имеем
.
1212
xTxTTxTxuk
&&&&
⋅
+
⋅
⋅
=
⋅
−−⋅ (8.5)
Приравнивая левые части уравнений (8.5) и (8.6), получим
1211
xukxTxukxT
−
⋅
=
⋅
−
−
⋅=⋅
&&
. (8.6)
Систему уравнений (8.2) и (8.6) запишем в нормальной форме
162
()( )
()( )
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=−=
=−=
.,,,
1
,,,,
1
121
1
1
111
2
utxxfxku
T
x
utxxfxx
T
x
&
&
(8.7)
Для решения поставленной задачи применим метод максимума Понтрягина.
Составим систему уравнений для вспомогательных функций
⎪
⎪
⎩
⎪
⎪
⎨
⎧
∂
∂
−=
∂
∂
−=
.
,
1
2
1
x
H
x
H
ψ
ψ
&
&
(8.8)
Функция Гамильтона
()
22111
,,, ffutxxH
⋅
+
⋅
=
ψ
ψ
. В нашем случае
() () ()
1
1
21
2
11
11
,,, xku
T
xx
T
utxxH −⋅⋅+−⋅⋅=
ψψ
. (8.9)
Тогда
2
1
Tx
H
ψ
−=
∂
∂
,
1
2
2
1
1
TTx
H
ψ
ψ
−=
∂
∂
. В этом случае система (8.8) запишется в виде
⎪
⎪
⎩
⎪
⎪
⎨
⎧
−=
=
.
,
2
1
1
2
2
2
1
1
TT
T
ψψ
ψ
ψ
ψ
&
&
(8.10)
Из первого уравнения системы (8.10) находим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=
2
01
exp)(
T
t
ct
ψ
. Тогда второе
уравнение системы (8.10) можно записать в виде
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−=−
22
0
1
2
2
exp
T
t
T
c
T
ψ
ψ
&
. (8.11)
Соотношение (8.11) является линейным неоднородным дифференциальным
уравнением. Его общее решение состоит из суммы общего решения
соответствующего однородного уравнения и частного решения неоднородного
уравнения. Общее решение однородного уравнения равно
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
1
1
exp
T
t
c
. Частное
решение будем искать в виде:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅Α
2
exp
T
t
. Подставляя эту функцию в уравнение
(8.11), получим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
Α
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
Α
22
0
2122
expexpexp
T
t
T
c
T
t
TT
t
T
. Тогда из этого уравнения
следует
2
0
21
21
T
c
TT
TT
−=
⋅
−
⋅Α
. Из последнего уравнения находим
12
10
TT
Tc
−
⋅
=Α
. Общим

163
решением уравнения (8.11) является функция
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=
212
10
1
12
expexp)(
T
t
TT
Tc
T
t
ct
ψ
.
Функция Гамильтона имеет вид
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−=Η
212
10
1
1
1
1
2
1
2
0
expexpexp
T
t
TT
Tc
T
t
c
T
xku
T
t
xx
T
c
. (8.12)
Рассмотрим слагаемое
Η , которое зависит от
u
.
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=Η
∗
212
10
1
1
1
expexp
T
t
TT
Tc
T
t
c
T
ku
.
(8.13)
Обозначим
12
10
2
TT
Tc
c
−
−=
. Тогда
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=Η
∗
2
2
1
1
1
expexp
T
t
c
T
t
c
T
ku
. В таком случае
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=Η
∗
212
10
1
1
1
max
expexpmax
T
t
TT
Tc
T
t
c
T
ku
. Управление определяется формулой
max
2
2
1
1
expexp)( u
T
t
c
T
t
csigntu ⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅=
, где
()
⎪
⎩
⎪
⎨
⎧
<−
=
>
=
.0 при ,1
,0 при ,0
,0 при ,1
x
x
x
xsign (8.14)
Функция
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
2
2
1
1
expexp
T
t
c
T
t
c
меняет знак не более одного раза. Поэтому
управление задается формулой
()
⎩
⎨
⎧
≤<−
<≤
=
.,
,0,
21max
1max
tttприu
ttприu
tu
(8.15)
где
1
t - время переключения управления,
2
t - время оптимального управления.
Теперь найдем траекторию оптимального процесса и моменты переключения
управления. На первом интервале управления уравнение (8.1) имеет вид
(
)
,
max2121
ukxxTTxTT
⋅
=
+
⋅
+
+
&&&
(8.16)
Это линейное неоднородное уравнение с постоянными коэффициентами.
Соответствующее линейное однородное уравнение будет таким
()
0
2121
=
+
⋅
+
+ xxTTxTT
&&&
. (8.17)
Характеристическое уравнение
(
)
01
21
2
21
=
+
⋅
+
+
rTTrTT имеет корни:
164
1
1
1
T
r
−= ,
r
T
2
2
1
−=
. Общим решением однородного уравнения является
функция
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
2
2
1
1
expexp
T
t
с
T
t
с
.Частным решением неоднородного уравнения
является величина
max
uk ⋅
. Тогда общим решением уравнения (8.16) будет
функция
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+⋅=
2
2
1
1max
expexp)(
T
t
c
T
t
cuktx
. (8.18)
Постоянные интегрирования
1
c
и
2
c определим из начальных условий: x = 0,
0=
x
&
. Так как
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−=
22
2
11
1
expexp)(
T
t
T
c
T
t
T
c
tx
&
, (8.19)
то получим следующую систему:
⎪
⎩
⎪
⎨
⎧
=−−
=++⋅
.0
,0
2
2
1
1
21max
T
c
T
c
ccuk
(8.20)
Решая систему, получим
,
12
1max
1
TT
Tuk
c
−
⋅
⋅
=
21
2max
2
TT
Tuk
c
−
⋅
⋅
= . Подставляя эти значения
в формулы (8.18) и (8.19), получим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+⋅⋅=
221
2
112
1
max
expexp1)(
T
t
TT
T
T
t
TT
T
uktx , (8.21)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅
=
2121
max
expexp)(
T
t
T
t
TT
uk
tx
&
. (8.22)
На втором этапе управления уравнение (8.1) будет иметь вид
()
,
max2121
ukxxTTxTT
⋅
−
=
+
⋅
++
&&&
(8.23)
Общим решением этого уравнения является функция
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+⋅−=
2
4
1
3max
expexp)(
T
t
c
T
t
cuktx
. (8.24)
Тогда
165
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−=
22
4
11
3
expexp)(
T
t
T
c
T
t
T
c
tx
&
. (8.25)
Для определения постоянных интегрирования
3
c
и
4
c используем условия
.0)(,)(
22
== txxtx
n
&
Тогда получим следующую систему
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+⋅−
.0expexp
,expexp
2
2
2
4
1
2
1
3
2
2
4
1
2
3max
T
t
T
c
T
t
T
c
x
T
t
c
T
t
cuk
n
(8.26)
Второе уравнение умножим на
1
T . Тогда систему можно переписать в виде
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅−
⋅+=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
.0expexp
,expexp
2
2
2
1
4
1
2
3
max
2
2
4
1
2
3
T
t
T
T
с
T
t
с
ukx
T
t
c
T
t
c
n
(8.27)
Сложив эти уравнения после небольших преобразований, найдем
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅⋅+
=
2
2
12
2max
4
exp
T
t
TT
Tukx
с
n
. Затем из второго уравнения системы имеем
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅⋅+
=
1
2
21
1max
3
exp
T
t
TT
Tukx
с
n
. Подставляя найденные значения
3
c
и
4
c
в формулы
(8.24) и (8.25), получим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−⋅⋅
−
⋅+
+⋅−=
2
2
2
1
2
1
21
max
max
expexp)(
T
tt
T
T
tt
T
TT
ukx
uktx
n
, (8.28)
.expexp)(
2
2
1
2
12
max
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−⋅
−
⋅+
=
T
tt
T
tt
TT
ukx
tx
n
&
(8.29)
Теперь определим моменты переключения управления
1
t и
2
t . Для этого
применим метод стыкования функций. В точке
1
tt
=
функции )(tx и )(tx
&
должны
быть непрерывны. Приравняем значения
)(tx , найденные по формулам (8.21) и
(8.28), а также значения
)(tx
&
, найденные по формулам (8.22) и (8.29), в точке
1
tt
=
,
получим следующую систему
166
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅⋅
−
⋅+
+⋅−=
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+⋅⋅
.expexpexpexp
expexp
expexp1
2
12
1
12
12
max
2
1
1
1
21
max
2
12
2
1
12
1
21
max
max
2
1
21
2
1
1
12
1
max
T
tt
T
tt
TT
ukx
T
t
T
t
TT
uk
T
tt
T
T
tt
T
TT
ukx
uk
T
t
TT
T
T
t
TT
T
uk
n
n
,(8.30)
Из второго уравнения системы находим
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅+
`expexpexpexp
2
1
1
1
21
max
1
12
12
max
2
12
12
max
T
t
T
t
TT
uk
T
tt
TT
ukx
T
tt
TT
ukx
nn
(8.31)
Подставим это значение в первое уравнение и раскроем скобки:
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅⋅
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅
+⋅⋅
2
1
21
2max
1
1
12
max
max
expexp2
T
t
TT
Tuk
T
t
TT
uk
uk
() ()
.expexp
expexp
2
1
21
2max
1
1
21
2max
1
12
12
2max
1
12
21
1max
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅⋅
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅⋅
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅⋅+
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅⋅+
=
T
t
TT
Tuk
T
t
TT
Tuk
T
tt
TT
Tukx
T
tt
TT
Tukx
nn
(8.32)
Выполнив некоторые упрощения, получим
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅⋅+=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅⋅−⋅⋅
1
12
max
1
1
maxmax
expexp2
T
tt
ukx
T
t
ukuk
n
. (8.33)
Все члены последнего уравнения разделим на
max
uk
⋅
и, обозначив
z
uk
x
n
=
⋅
max
,
получим следующую систему уравнений:
()
() ()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅+−
=−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅+
.0expexpexp1exp1
,02expexp1
2
1
1
1
2
12
1
12
1
1
1
12
T
t
T
t
T
tt
z
T
tt
z
T
t
T
tt
z
(8.34)
Сложив уравнения, получим
()
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅+
=−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅+
.02expexp1
,02expexp1
2
1
2
12
1
1
1
12
T
t
T
tt
z
T
t
T
tt
z
(8.35)
167
Найдем
2
t
из первого и второго уравнений системы, а затем их приравняем.
Последовательно получаем
()
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅+
,expexp2exp1
,expexp2exp1
2
1
2
1
2
2
1
1
1
1
1
2
T
t
T
t
T
t
z
T
t
T
t
T
t
z
(8.36)
⎪
⎪
⎩
⎪
⎪
⎨
⎧
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
,1exp2
1
1
exp
,1exp2
1
1
exp
2
1
2
2
1
1
1
2
T
t
zT
t
T
t
zT
t
(8.37)
⎪
⎪
⎩
⎪
⎪
⎨
⎧
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
⋅=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
⋅=
.1exp2
1
1
ln
,1exp2
1
1
ln
2
1
22
1
1
12
T
t
z
Tt
T
t
z
Tt
(8.38)
Приравняв правые части последней системы, получим нелинейное уравнение
относительно
1
t
:
01exp2
1
1
ln1exp2
1
1
ln)(
2
1
2
1
1
11
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
⋅−
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⋅⋅
+
⋅=
T
t
z
T
T
t
z
TtF
. (8.39)
Уравнение (8.39) решаем на компьютере методом половинного деления. Для
наших исходных данных получаем
3990.1
1
=
t . Тогда 4187.1
2
=
t . Значения
)(tx
и
)(tx
&
можно записать в виде
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
≤≤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
−
⋅+
+⋅−
≤≤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
+⋅⋅
=
,,expexp
,0,expexp1
21
2
2
2
1
2
1
21
max
max
1
221
2
112
1
max
tttпри
T
tt
T
T
tt
T
TT
ukx
uk
ttпри
T
t
TT
T
T
t
TT
T
uk
tx
n
(8.40)
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
≤≤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
⋅+
≤≤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−⋅
−
⋅
=
.,expexp
,0,expexp
21
2
2
1
2
12
max
1
2121
max
tttпри
T
tt
T
tt
TT
ukx
ttпри
T
t
T
t
TT
uk
tx
n
&
(8.41)
168
При решении нелинейного уравнения было вычислено значение функции
y
в
точке
1
tt = . Оно равно
10
103.1
−
⋅ , что подтверждает правильность решения
нелинейного уравнения. Исходные данные и результаты расчетов приведены
ниже. В точке
3990.1
1
=
=
tt значения
)(tx
и
)(tx
&
, вычисленные по разным
формулам, совпадают. Это подтверждает правильность приведенных формул.
8.3 Программная реализация аналитических моделей
function [X,DX] = OptUpr(T1,T2,k,Umax,Xn)
%-- ФУНКЦИЯ ДЛЯ РАСЧЕТА ПЕРЕХОДНОГО ПРОЦЕССА
%-- ОПТИМАЛЬНОГО УПРАВЛЕНИЯ:
%-- 1.Расчет параметров математической модели:
z = 0.8643; %-- промежуточный расчетный параметр;
y = 1.309672e-10; %-- промежуточный расчетный параметр;
t1 = 1.3990; %-- время переключения управления;
t2 = 1.4187; %-- время перехода системы в конечную точку;
%-- 2.Задание временных точек:
t = [0.0000 0.2798 0.5596 0.8394 1.1192...
1.3990 1.4029 1.4069 1.4108 1.4147 1.4187];
%-- 3.Расчет управляемой величины:
for i = 1:1:11
if t(i) <= t1
X(i) = k*Umax*(1+T1/(T2-T1)*exp(-t(i)/T1)+...
T2/(T1-T2)*exp(-t(i)/T2));
else
X(i) = -k*Umax+(Xn+k*Umax)/(T1-T2)*(T1*exp((t2-...
t(i))/T1)-T2*exp((t2-t(i))/T2));
end
end
%-- 4.Расчет скорости изменения управляемой величины:
for i = 1:1:11
if t(i) <= t1
DX(i) = k*Umax/(T1-T2)*(exp(-t(i)/T1)-...
exp(-t(i)/T2));
else
DX(i) = (Xn+k*Umax)/(T2-T1)*(exp((t2-...
t(i))/T1)-exp((t2-t(i))/T2));
end
end
%-- 5.Визуализация управляемой величины и скорости ee изменения:
subplot(2,2,1)
plot(t,X,'r')
xlabel('t')
ylabel('X')
subplot(2,2,2)
plot(t,DX,'r')
169
xlabel('t')
ylabel('DX')
%-- 6.Конец функции OptUpr(T1,T2,k,Umax,Xn)
8.4
Построение имитационных моделей
В соответствии с математическим описанием объекта управления и
поставленными задачами имитационная модель содержит два интегрирующих
блока, необходимые генераторы сигналов, дисплеи, осциллографы, сумматоры и
другие элементы (см. рис. 8.2).
Требуется построить эту модель, используя библиотеки блоков пакета
Simulink, и настроить параметры блоков в соответствии с условиями задачи.
Проверить работу модели можно путем её
многократного запуска при изменении
времени окончания работы. Модифицируя состав модели и изменяя режим её
работы, можно получить все требуемые характеристики объекта управления.
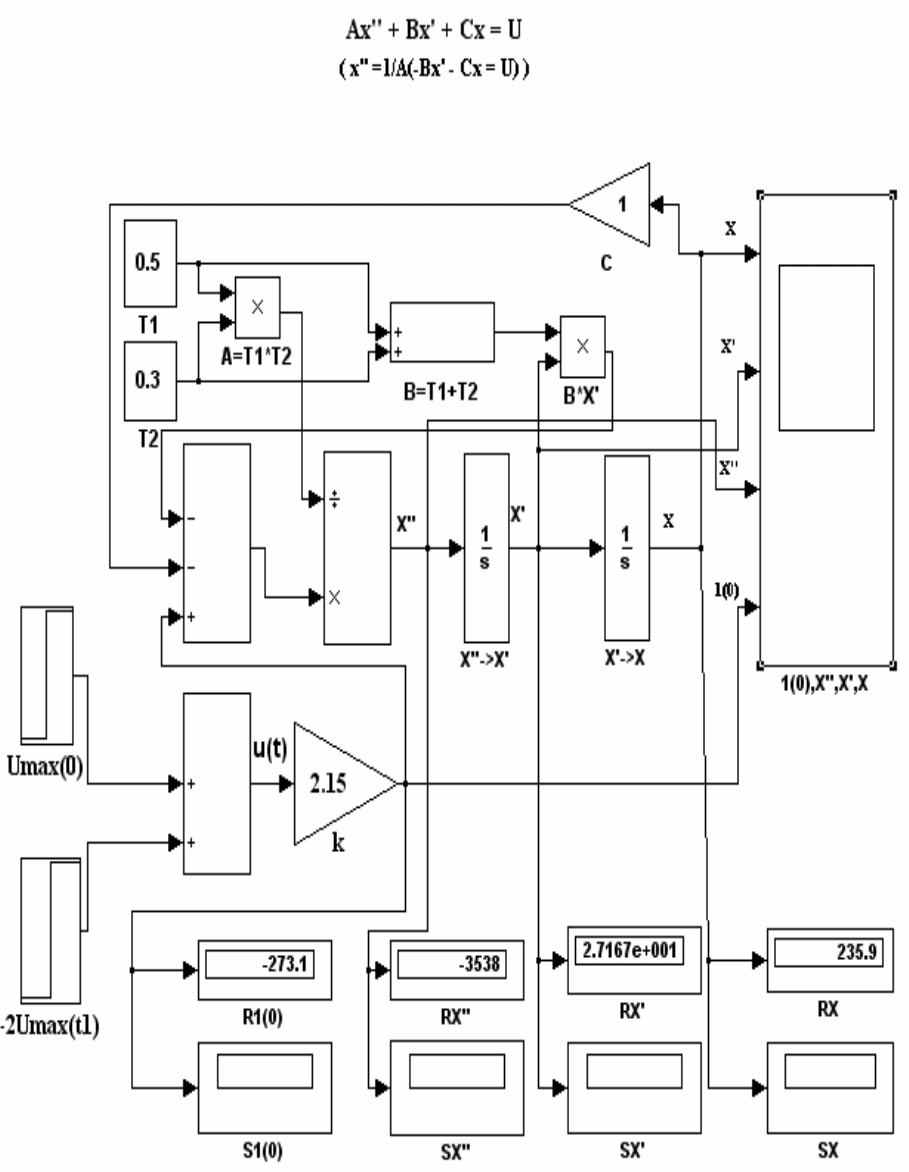
170
Рис 8.1 Имитационная модель оптимального управления