Сиротин Э.Е. Автоматизированные системы управления технологическими процессами. Конспект лекций
Подождите немного. Документ загружается.

151
вием между ней и реальной системой или процессом.
Модели, отдельные элементы которых соответствуют лишь крупным
частям реальной системы, называют гомоморфными.
Математические модели могут быть аналитическими и имитаци-
онными. При использовании аналитических моделей процессы функциони-
рования элементов сложной системы записываются в виде функциональных
соотношений. Аналитическая модель может быть использована одним из
следующих способов:
1. аналитически – когда получают в общем виде явные зависимости для
искомых величин;
2. численно – когда для решения уравнений применяют методы вычис-
лительной техники, чтобы получить числовые результаты при конкретных
начальных данных;
3. качественно – когда, не имея решений в явном виде, можно найти
некоторые свойства системы, например, устойчивость и т.д.
При использовании имитационных моделей, в отличие от аналитиче-
ских, в ЭВМ воспроизводится текущее функционирование технической сис-
темы (ТС) в некотором масштабе времени. Эксперимент позволяет учесть
влияние большого числа случайных и детерминированных факторов, дает
возможность проводить активный эксперимент с помощью целенаправлен-
ных изменений параметров модели на некотором множестве реализаций.
Одно из основных достоинств имитационных моделей – возможность
моделирования в тех случаях, когда аналитические модели либо отсутству-
ют, либо не дают практически надежных результатов.
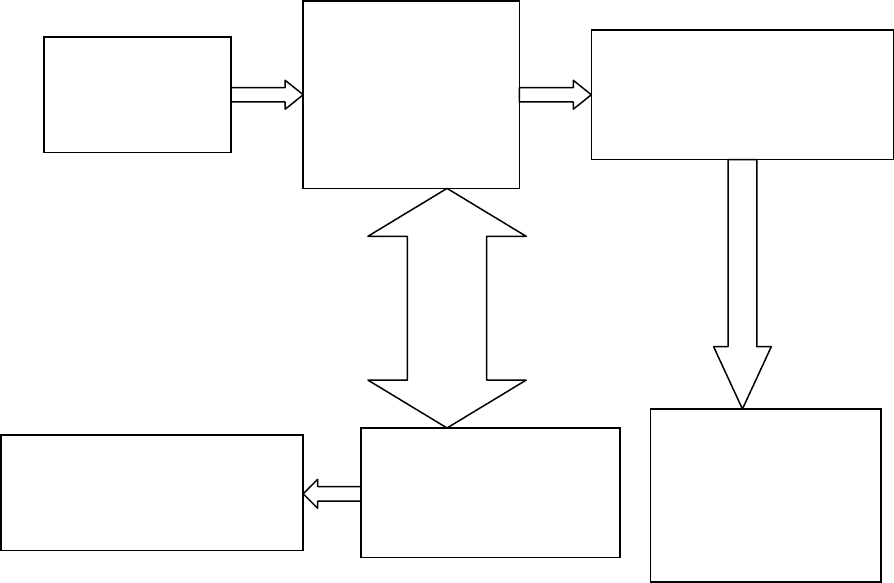
Стратегия построения математической модели включает следующие
этапы (рис. 8.2):
– формулирование целей оптимизации параметров технологического
процесса, что включает выбор количественных и качественных критериев
оптимизации (целевых функций) и их ограничений;
– выбор вида математической модели с учетом особенностей про-
цесса:
– детерминированный, стохастический и создание алгоритма дис-
кретного или нелинейного программирования на ЭВМ;
– математическое моделирование с обработкой данных на ЭВМ;
– проверку адекватности математической модели исследуемому про-
цессу с целью проверки насколько правомерны принятые допущения.
При необходимости математическая модель корректируется и исполь-
зуется для оптимизации технологического процесса.
152
Рисунок 8.2 Стратегия построения математической модели ТП.
Процесс функционирования сложной системы представляется как сово-
купность действий ее элементов, подчиненных единой цели.
ПОДБОР РЕГУЛЯТОРА И ОПРЕДЕЛЕНИЕ ЕГО НАСТРОЕК
Выбор типа регулятора
Задача проектировщика состоит в выборе такого типа регулятора, кото-
рый при минимальной стоимости и максимальной надежности обеспечивал
бы заданное качество регулирования.
Разработчиком могут быть выбраны релейные, непрерывные или дискретные
(цифровые) типы регуляторов.
Для того, чтобы выбрать тип регулятора и определить его настройки не-
обходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозицион-
ных регуляторов и может заканчиваться самонастраивающимися микропро-
цессорными регуляторами. Заметим, что по требованиям технологического
регламента многие объекты не допускают применения релейного управляю-
Обработка
результатов
моделирования на
ЭВМ
Выбор
целевой
функции
Выбор
модели
создание
алгоритма
Математическое
моделирование
процесса
Использование
модели для
оптимизации ТП
Проверка
адекватности
модели
153
щего воздействия.
Рассмотрим показатели качества серийных регуляторов. В качестве се-
рийных предполагаются непрерывные регуляторы, реализующие И, П, ПИ и
ПИД - законы управления.
Теоретически, с усложнением закона регулирования качество работы
системы улучшается. На динамику регулирования наибольшее влияние ока-
зывает величина отношения запаздывания к постоянной времени объекта
T
. Эффективность компенсации ступенчатого возмущения регулятором может
характеризоваться величиной динамического коэффициента регулирования
d
R
, а быстродействие – величиной времени регулирования.
Теоретически, в системе с запаздыванием, минимальное время регули-
рования
min
2
p
t
.
Наибольшее быстродействие среди регуляторов с типовыми законами
управления обеспечивает П-закон управления. Однако, если коэффициент
усиления П-регулятора
p
K
мал (чаще всего это наблюдается в системах с за-
паздыванием), то такой регулятор не обеспечивает высокой точности регули-
рования, поскольку в этом случае велика величина статической ошибки.
Если
p
K
имеет величину равную 10 и более, то П-регулятор приемлем,
а если
10
p
K
, то требуется введение в закон управления интегральной со-
ставляющей.
Наиболее распространенным на практике является ПИ-регулятор, ко-
торый обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования.
2. Достаточно прост в настройке, т.к. настраиваются только два пара-
метра, а именно коэффициент усиления
p
K
и постоянная интегрирования
i
T
.
В таком регуляторе имеется возможность оптимизации
max
pi
KT
, что
обеспечивает управление с минимально возможной среднеквадратичной
ошибкой регулирования.
3. Малая чувствительность к шумам в канале измерения (в отличии от
ПИД-регулятора).
Для наиболее ответственных контуров можно рекомендовать использо-
вание ПИД-регулятора, обеспечивающего наиболее высокое быстродействие
в системе. Однако, следует учитывать, что это условие выполняется только
при его оптимальных настройках (настраиваются три параметра). С увеличе-
нием запаздывания в системе резко возрастают отрицательные фазовые сдви-
ги, что снижает эффект действия дифференциальной составляющей регуля-
тора. Поэтому качество работы ПИД-регулятора для систем с большим за-
паздыванием становится сравнимо с качеством работы ПИ-регулятора. Кро-
ме этого, наличие шумов в канале измерения в системе с ПИД-регулятором
приводит к значительным случайным колебаниям управляющего сигнала ре-
гулятора, что увеличивает дисперсию ошибки регулирования и износ испол-
154
нительного механизма. Таким образом, ПИД-регулятор следует выбирать для
систем регулирования, с относительно малым уровнем шумов и величиной
запаздывания в объекте управления. Примерами таких систем является сис-
темы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величи-
ну отношения запаздывания к постоянной времени в объекте . Если
0,2T
, то можно выбрать релейный, непрерывный или цифровой регулято-
ры.
Если
0,2 1T
, то должен быть выбран непрерывный или цифровой,
ПИ- или ПИД-регулятор.
Если
1T
, то выбирают специальный цифровой регулятор с упреж-
дающим устройством, который компенсирует запаздывание в контуре управ-
ления. Однако этот же регулятор рекомендуется применять и при меньших
отношениях
T
.
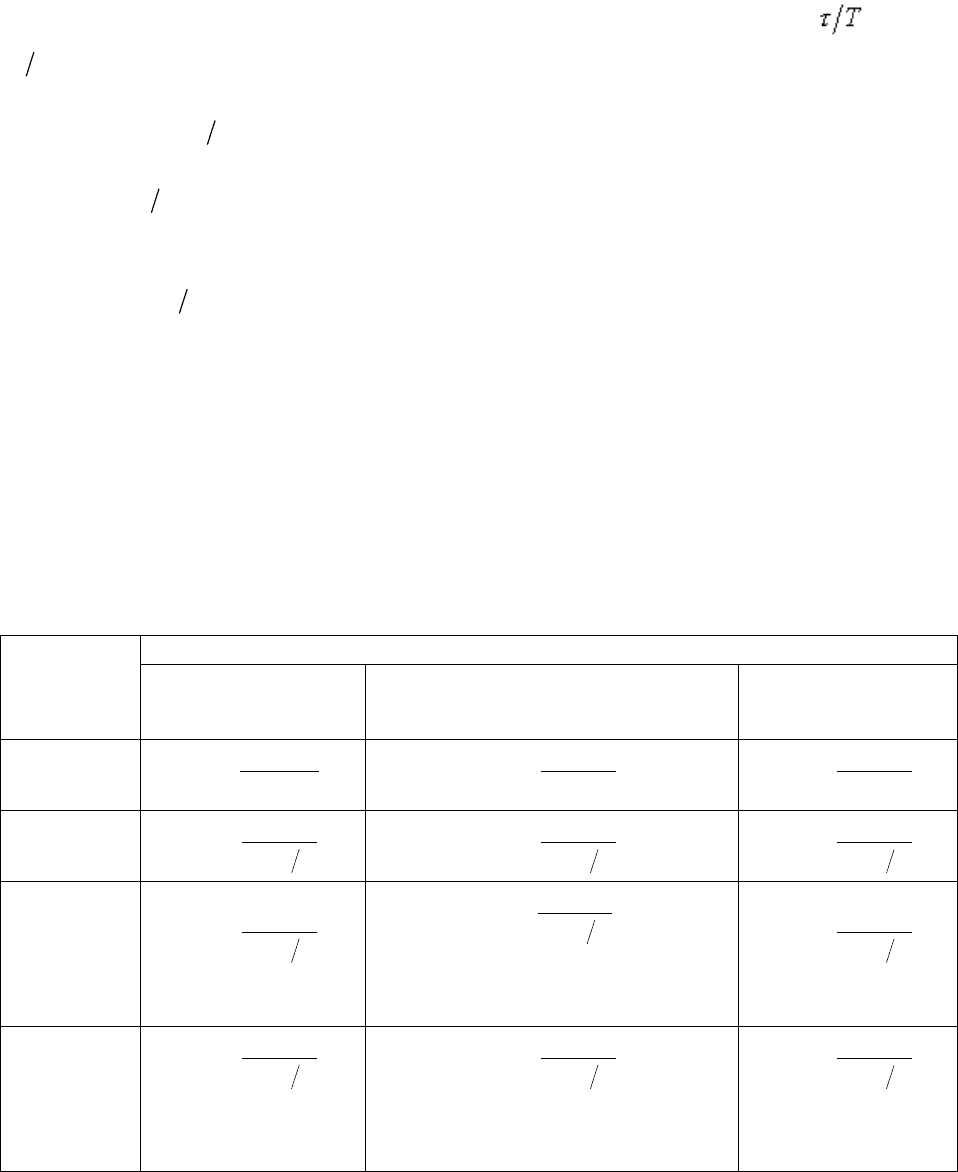
Формульный метод определения настроек регулятора
Метод используется для быстрой, приближенной оценки значений па-
раметров настройки регулятора для трех видов оптимальных типовых про-
цессов регулирования.
Метод применим как для статических объектов с самовыравниванием
(таблица 8.1), так и для объектов без самовыравнивания (таблица 8.2).
Таблица 8.1.
Регулятор
Типовой процесс регулирования
апериодический
с 20% перерегулированием
0
( ) minJ e t dt
И
1
4,5
p
oy
K
K
1
1,7
p
oy
K
K
1
1,7
p
oy
K
K
П
0,3
p
oy
K
KT
0,7
p
oy
K
KT
0,9
p
oy
K
KT
ПИ
0,6
0,6
p
oy
i
K
KT
TT
0,7
0,6
( 0,3 )
p
oy
i
i
K
KT
TT
TT
1
p
oy
i
K
KT
TT
ПИД
0,95
2,4
0,4
p
oy
d
i
K
KT
T
T
1,2
2
0,4
p
oy
d
i
K
KT
T
T
1,4
1,3
0,5
p
oy
d
i
K
KT
T
T
где
,,
oy
TK
– постоянная времени, запаздывание и коэффициент усиле-

155
ния объекта.
В этих формулах предполагается, что настраивается регулятор с зави-
симыми настройками, передаточная функция которого имеет вид:
1
( ) 1
pd
i
W p K T p
Tp
, (8.1)
где
p
K
– коэффициент усиления регулятора,
i
T
– время изодрома (постоянная
интегрирования регулятора),
d
T
– время предварения (постоянная дифферен-
цирования).
Таблица 8.2.
Регулятор
Типовой процесс регулирования
апериодический
с 20% перерегулированием
П
0,4
4,5
p
K
T
0,7
p
K
T
0,7
p
K
T
ПИ
0,4
6
p
i
K
T
TT
0,7
3
p
i
K
T
TT
1
4
p
i
K
T
TT
ПИД
0,6
5
0,2
p
d
i
K
T
T
T
1,1
2
0,4
p
d
i
K
T
T
T
1,4
1,6
0,5
p
d
i
K
T
T
T
Оптимальная настройка регуляторов по номограммам
В отличии от формульного метода, метод расчета по номограммам по-
зволяет более точно определить настройки регулятора, т.к. учитывает нали-
чие нелинейной зависимости между параметрами настройки регулятора и ве-
личиной отношения
T
.
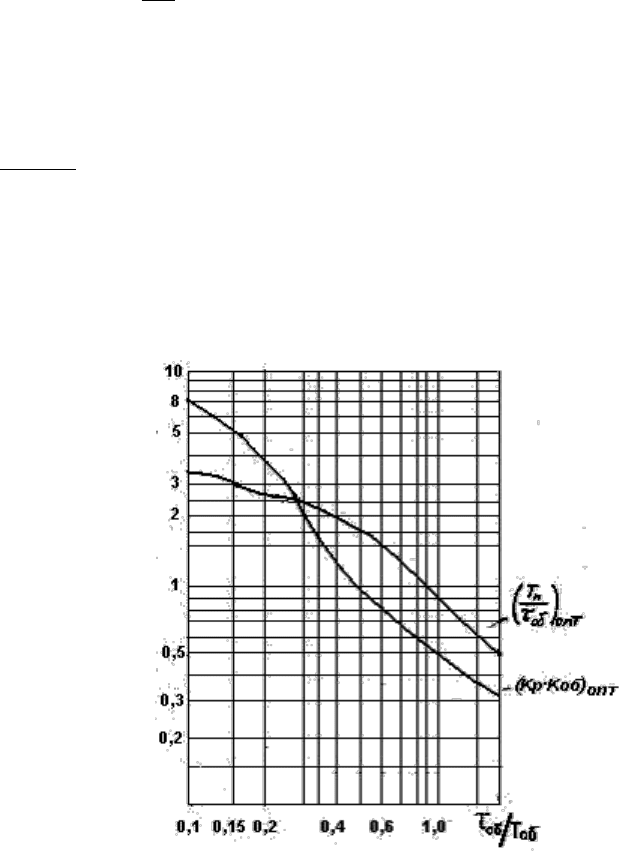
Существуют номограммы для расчета настроек ПИ и ПИД-регуляторов
для объектов первого и второго порядков с запаздыванием.
Предположим, что объект управления описывается звеном первого по-
рядка с запаздыванием, а оптимальный процесс регулирования - это процесс
с 20%-ным перерегулированием. Соответствующая номограмма расчета на-
строек ПИ-регулятора приведена на рис.8.3.
Следует иметь ввиду, что современные электронные и микропроцес-
сорные регуляторы реализуют ПИ- и ПИД-законы регулирования с зависи-
мыми настройками, а пневматические регуляторы - с независимыми настрой-
ками вида:
156
1
( ) .
пн p d
i
W p K T p
Tp
Дифференциальная составляющая промышленных регуляторов обычно
реализуется в виде
1
pd f
d
f
K T p
Tp
Tp
,
где
pd
K
– коэффициент усиления по дифференциальной составляющей (вы-
бирается в диапазоне 1 – 10),
f
T
– постоянная времени фильтра. Эти парамет-
ры определяются из соотношения
pd f d
K T T
.
Рисунок 8.3. Номограмма для расчета настроек ПИ-регулятора.
Чем выше уровень помех в выходном сигнале объекта, тем меньше ре-
комендуется брать величину
pd
K
. Это будет способствовать уменьшению ве-
личины средней квадратичной ошибки регулирования.
Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсут-
ствуют достаточно точные математические модели, описывающие их стати-
ческие и динамические характеристики. В то же время, проведение экспери-
ментов по снятию этих характеристик весьма дорого и трудоемко.
Экспериментальный метод настройки регуляторов не требуют знания мате-
матической модели объекта. Однако предполагается, что система смонтиро-
вана и может быть запущена в работу, а также существует возможность из-
менения настроек регулятора. Таким образом, можно проводить некоторые

157
эксперименты по анализу влияния изменения настроек на динамику системы.
В конечном итоге гарантируется получение хороших настроек для данной
системы регулирования.
Существуют два метода настройки - метод незатухающих колебаний и метод
затухающих колебаний.
Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциаль-
ная составляющие регулятора (
,0
id
TT
), т.е. система переводится в П-
закон регулирования. Путем последовательного увеличения
p
K
, с одновре-
менной подачей небольшого скачкообразного сигнала задания, добиваются
возникновения в системе незатухающих колебаний с периодом
кр
T
. Это соот-
ветствует выведению системы на границу колебательной устойчивости. При
возникновении данного режима работы фиксируются значения критического
коэффициента усиления регулятора
кр
K
и периода критических колебаний в
системе
кр
T
. При появлении критических колебаний ни одна переменная сис-
темы не должна выходить на уровень ограничения.
По значениям
кр
T
и
кр
K
рассчитываются параметры настройки регуля-
тора:
П-регулятор:
0,55
p кр
KK
;
ПИ-регулятор:
0,45 , 1,2
p кр i кр
K K T T
;
ПИД-регулятор:
0,6 , 2, 8
p кр i кр d кр
K K T T T T
.
При выведении замкнутой системы на границу колебательной устойчи-
вости амплитуда колебаний может превысить допустимое значение, что в
свою очередь приведет к возникновению аварийной ситуации на объекте или
к выпуску бракованной продукции. Поэтому не все системы управления
промышленными объектами могут выводиться на критический режим рабо-
ты.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выве-
дения системы на критические режимы работы. Также, как и в предыдущем
методе, для замкнутой системы с П-регулятором, путем последовательного
увеличения
кр
K
добиваются переходного процесса отработки прямоугольно-
го импульса по сигналу задания или возмущения с декрементом затухания
1/ 4D
.
Далее определяется период этих колебаний
k
T
и значения постоянных
интегрирования и дифференцирования регуляторов
,
id
TT
.

158
Для ПИ-регулятора:
6
ik
TT
;
Для ПИД-регулятора:
6; 1,5
i k d k
T T T T
.
После установки вычисленных значений
i
T
и
d
T
на регуляторе необхо-
димо экспериментально уточнить величину
кр
K
для получения декремента
затухания
1/ 4D
. С этой целью производится дополнительная подстройка
кр
K
для выбранного закона регулирования, что обычно приводит к уменьше-
нию
кр
K
на 20…30%.
Большинство промышленных систем регулирования считаются качест-
венно настроенными, если их декремент затухания D равен 1/4 или 1/5.
Регулирование при наличии шумов
Наличие высокочастотных шумовых составляющих в измерительном
сигнале приводит к случайным колебаниям исполнительного механизма сис-
темы, что, в свою очередь, увеличивает дисперсию ошибки регулирования,
снижает точность регулирования. В некоторых случаях сильные шумовые
составляющие могут привести систему к неустойчивому режиму работы
(стохастическая неустойчивость).
В промышленных системах в измерительных цепях часто присутству-
ют шумы, связанные с частотой питающей сети (сетевые наводки). В связи с
этим важной задачей является правильная фильтрация измерительного сиг-
нала, а также выбор нужного алгоритма и параметров работы регулятора.
Для фильтрации сигналов используются фильтры низкой частоты вы-
сокого порядка (5 - 7-го порядка), имеющие большую крутизну спада. Такие
ФНЧ иногда встраиваются в нормирующие преобразователи. Кроме этого,
для подавления сетевых наводок (50 Гц в России, 60 Гц в США) используют
фильтр-пробку или заграждающий фильтр. Следует учитывать, что заграж-
дающий фильтр рекомендуется применяют только для быстродействующих
систем, полоса пропускания которых более 50 Гц.
Таким образом, главной задачей регулятора является компенсация низ-
кочастотных возмущений. При этом, с целью получения минимальной дис-
персии ошибки регулирования, высокочастотные помехи должны быть от-
фильтрованы.
Однако, в общем случае, эта задача противоречивая, поскольку спек-
тры возмущения и шума могут накладываться друг на друга. Это противоре-
чие разрешается с помощью теории оптимального стохастического управле-
ния, которая позволяет добиться хорошего быстродействия в системе при
минимально возможной дисперсии ошибки регулирования.
Для уменьшения влияния помех в практических ситуациях применяют-
ся два способа, основанных на:
1. уменьшении коэффициента усиления регулятора
кр
K
, т.е., фактиче-
ски, переход на интегральный закон регулирования, который малочувствите-
159
лен к шумам;
2. фильтрации измеряемого сигнала.
В общем случае, с целью снижения уровня помех, необходимо также
правильно выбирать места установки датчиков и применять экранирование
измерительных линий.
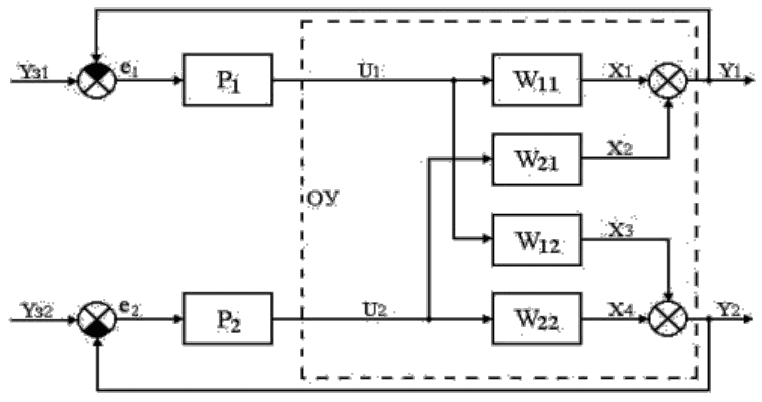
Методы настройки двухсвязных систем регулирования
Из общего числа систем регулирования около 15% составляют двух-
связные системы регулирования (рис. 8.4). В таких системах, даже при нали-
чии устойчивой автономной работы двух регуляторов, вся система может
стать неустойчивой, за счет действия перекрестной связи в объекте управле-
ния.
Рисунок 8.4. Структурная схема двухсвязной системы.
Промежуточные сигналы
1 2 3 4
, , ,x x x x
обычно недоступны для измерения,
поэтому управление ведется по вектору выхода Y:
1
2
y
Y
y
.
Для объективной настройки регуляторов двухсвязных систем форми-
руется критерий качества вида:
0 1 1 2 2
J J J
,
где
1
и
2
– коэффициенты веса (штрафа),
1
J
и
2
J
– критерии качества пер-
вого и второго контуров.
Путем перераспределения коэффициентов веса
1
и
2
можно выделить
более важный контур, в котором качество процессов управления должно
160
быть более высоким. Например, если первый контур должен обеспечивать
более высокую точность работы, то
1
требуется увеличить.
Задача настройки регулятора состоит в том, чтобы при заданных
1
и
2
обеспечить минимальное значение
0
J
системы, где
2
0
( ) , 1,2
ii
J e t dt i
.
Рассмотрим различные методы настройки регуляторов в двухсвязных
системах.
Метод автономной настройки регуляторов
В этом случае настройка регуляторов Р1 и Р2 производится последова-
тельно, пренебрегая взаимными влияниями контуров. Процедура настройки
осуществляется следующим образом:
– регулятор Р2 переводится в ручной режим работы;
– настраивается регулятор Р1 так, чтобы критерий
1
J
был минимален;
– отключается настроенный регулятор Р1 и включается регулятор Р2;
– настраивается Р2, обеспечивая минимум
2
J
;
– включаются оба регулятора в работу.
Такой подход рекомендуется использовать если:
– наблюдается малое взаимное влияние контуров;
– быстродействие одного контура значительно выше другого (контуры
разнесены по частотам);
– в перекрестных связях одна из передаточных функций имеет коэф-
фициент передачи (усиления) значительно меньше, чем другая, т.е. наблюда-
ется одностороннее влияние.
Метод итеративной настройки регуляторов
Этот метода аналогичен предыдущему методу, но здесь осуществляет-
ся многократная настройка регуляторов Р1 и Р2 (последовательная подстрой-
ка) с целью обеспечения минимального значения критерия качества
0
J
всей
системы.
Следует учитывать, что только метод итеративной настройки регулято-
ров обеспечивает качественную работу двухсвязной системы даже при нали-
чии сильных перекрестных связей. Это объясняется тем, что оптимизация
критерия качества
0
J
системы происходит при включенных Р1 и Р2.
Данный метод часто применяется при аналоговом и цифровом модели-
ровании двухсвязных систем, поскольку его применение в реальных услови-