Сиротин Э.Е. Автоматизированные системы управления технологическими процессами. Конспект лекций
Подождите немного. Документ загружается.

141
– относительно малая длительность эксперимента.
Следует учитывать, что активные методы, в той или иной степени,
приводят к нарушению нормального хода технологического процесса. По-
этому проведение эксперимента должно быть тщательно спланировано.
В пассивных методах на вход объекта не подаются никакие пробные
сигналы, а лишь фиксируется естественное движение объекта в процессе его
нормального функционирования. Полученные реализации массивов данных
входных и выходных сигналов обрабатываются статическими методами. По
результатам обработки получают параметры передаточной функции объекта.
Однако, такие методы имеют ряд недостатков:
– малая точность получаемого математического описания, (т.к. откло-
нения от нормального режима работы малы);
– необходимость накопления больших массивов данных с целью по-
вышения точности (тысячи точек);
– если эксперимент проводится на объекте, охваченном системой регу-
лирования, то наблюдается эффект корреляции (взаимосвязи) между вход-
ным и выходным сигналами объекта через регулятор. Такая взаимосвязь
снижает точность математического описания.
Определение динамических характеристик объекта управления по
его кривой разгона
При определении динамических характеристик объекта по его кривой
разгона на вход подается ступенчатый пробный сигнал При снятии кривой
разгона необходимо выполнить ряд условий:
1. Если проектируется система стабилизации, то кривая разгона должна
сниматься в окрестности рабочей точки процесса.
2. Кривые разгона необходимо снимать как при положительных, так и
отрицательных скачках управляющего сигнала. По виду кривых можно су-
дить о степени асимметрии объекта. При небольшой асимметрии расчет на-
строек регулятора рекомендуется вести по усредненным значениям парамет-
ров передаточных функций. Линейная асимметрия наиболее часто проявля-
ется в тепловых объектах управления.
3. При повышенном уровне шумов в выходном сигнале, желательно
снимать несколько кривых разгона с их последующим наложением друг на
друга и получением усредненной кривой.
4. При снятии кривой разгона необходимо выбирать наиболее стабиль-
ные режимы процесса, например, ночные смены, когда действие внешних
случайных возмущений маловероятно.
5. При снятии кривой разгона амплитуда пробного входного сигнала
должна быть, с одной стороны, достаточно большой, чтобы четко выделялась
кривая разгона на фоне шумов, а, с другой стороны, она должна быть доста-
точно малой, чтобы не нарушать нормального хода технологического про-
142
цесса.
Сняв кривую разгона, и оценив характер объекта управления (с само-
выравниванием или без) можно определить параметры соответствующей пе-
редаточной функции. Передаточную функцию вида (7.5) рекомендуется при-
менять для объектов управления с явно выраженной доминирующей посто-
янной времени.
Перед началом обработки кривую разгона рекомендуется пронорми-
ровать (диапазон изменения нормированной кривой 0 - 1) и выделить из ее
начального участка величину чистого временного запаздывания.
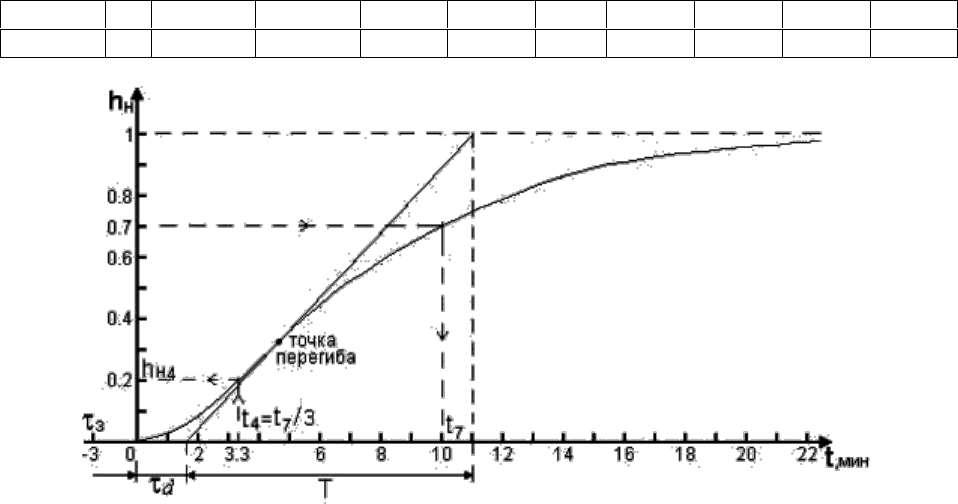
Пример.[32] Дана нормированная кривая разгона объекта, у которой
заранее выделена величина чистого запаздывания
3
ç
ì èí
. Построим график
кривой разгона (рис. 7.2) по ее значениям, приведенным в табл. 7.1.
Таблица 7.1.
t, мин
0
2
4
6
8
10
12
14
18
22
h
н
0
0,087
0,255
0,43
0,58
0,7
0,78
0,84
0,92
0,96
Рисунок 7.2. График кривой разгона.
Динамический коэффициент усиления K объекта определяется как от-
ношение приращения выходного сигнала к приращению входного в окрест-
ности рабочей точки.
Определение динамических характеристик объектов по кривой разгона
можно производить двумя методами.
1) Метод касательной к точке перегиба кривой разгона.
В данном случае точка перегиба соответствует переходу кривой от режима
ускорения к режиму замедления темпа нарастания выходного сигнала. По-
стоянная времени Т и динамическое запаздывание
ä
определяются в соот-
ветствии с графиком рис.7.2, т.е.
çä
.
143
2) Формульный метод позволяет аналитически вычислить величину
динамического запаздывания и постоянной времени по формулам:
ln(1 ) (ln(1 )
,
ln(1 ) ln(1 ) ln(1 )
Aä
B A A B
ä
A B A
t
t h t h
T
h h h
,
где значение
A
h
берется в окрестности точки перегиба кривой, а значе-
ние
B
h
принимается равным 0,8 - 0,85. По этим значениям определяются и
моменты времени
A
t
и
B
t
.
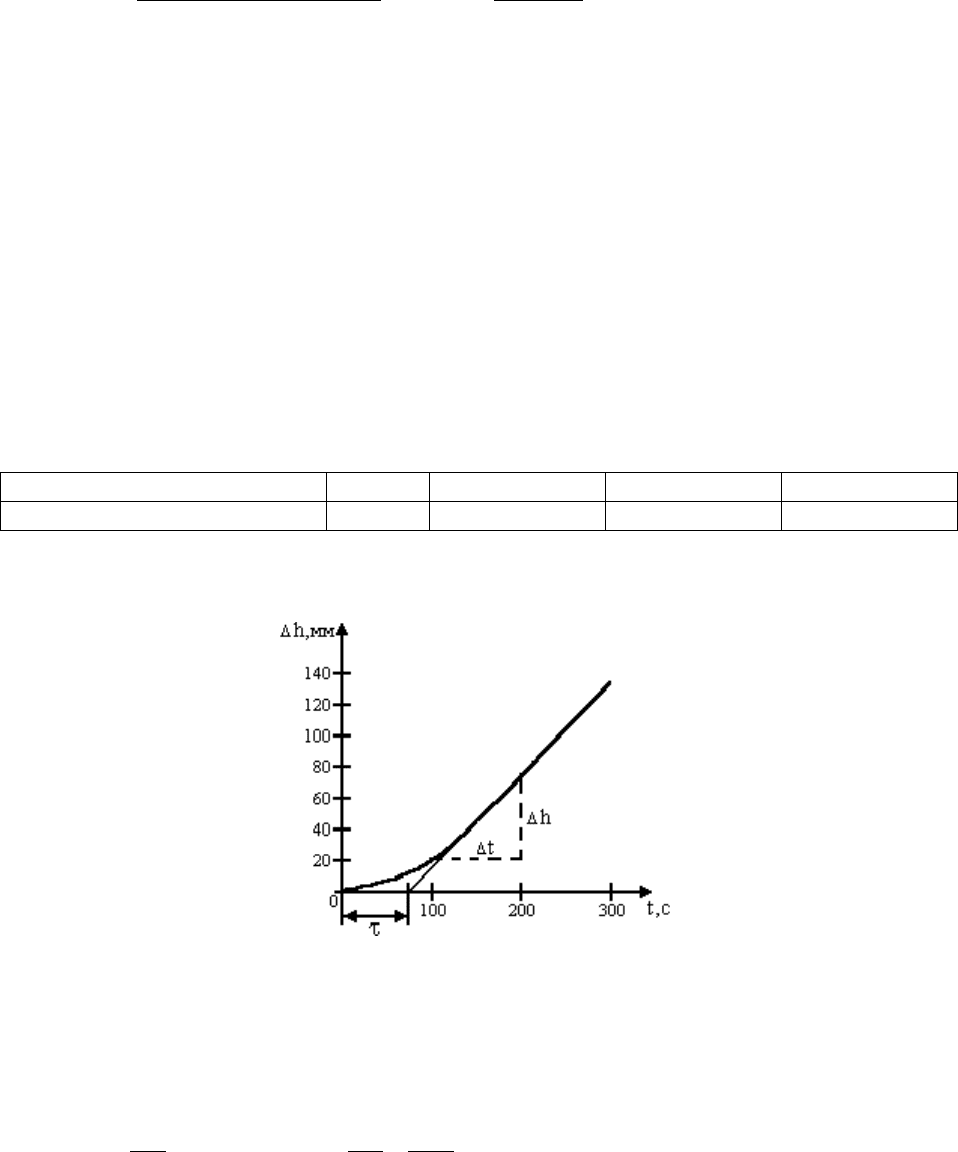
Методику определения параметров динамической модели (7.6) объекта
без самовыравнивания рассмотрим на примере кривой разгона уровня в ба-
рабане котла теплоагрегата [32]. Предполагается, что на вход объекта увели-
чили подачу воды на 10 т/час =
Q
, при этом уровень начал увеличиваться.
Приращение уровня зафиксировано в табл. 7.2.
Таблица 7.2.
t
c
, сек
0
100
200
300
h
, мм
0
20
76
135
График разгонной характеристики объекта без самовыравнивания, по-
строенной в соответствии с приведенной таблицей показан на рис. 7.3.
Рисунок 7.3. График разгонной характеристики объекта без самовыравнивания.
Для объекта без самовыравнивания коэффициент усиления определяет-
ся как отношение установившейся скорости изменения выходной величины к
величине скачка входного сигнала. В нашем примере
56 0,56
0,56ì ì /ñ 0,056
100 10
h
h
v
vK
Q
.
Величина динамического запаздывания
в объекте определяется так,
144
как показано на рис. 7.3.
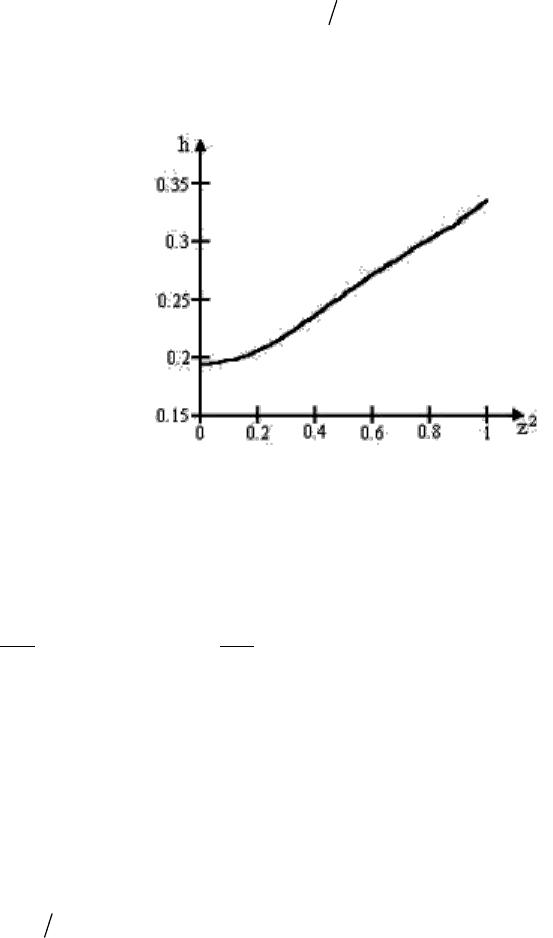
Для определения по нормированной кривой разгона двух доминирую-
щих постоянных объекта управления модели вида (7.7) применяют метод
Орманса. Определим с помощью метода Орманса постоянные времени объ-
екта по кривой разгона на рис. 7.2.
Для этого:
1. Из нормированной кривой разгона определяется время, соответст-
вующее значению
0,7
í
h
и обозначается t
7
. Полученный интервал делится на
три части. Поднимается перпендикуляр до кривой разгона и определяется ве-
личина
4í
h
. Существует связь между точками кривой разгона и параметрами
модели, а именно
7 1 2 4 7
1,2( ), 3t T T t t
.
Постоянные времени объекта управления
1
T
и
2
T
определяются с по-
мощью вспомогательной величины
2
Z
, для нахождения которой использует-
ся номограмма (рис. 7.4).
Рисунок 7.4. Номограмма для определения величины
2
Z
.
Постоянные времени объекта управления
1
T
и
2
T
определяются по сле-
дующим формулам:
77
12
(1 ), (1 )
2,4 2,4
tt
T Z T Z
. (7.8)
Частотные методы определения динамических характеристик
Эти методы предполагают, что на вход объекта подается периодиче-
ский сигнал с известной частотой и амплитудой. При этом, если этот сигнал
формируется с помощью прямоугольных импульсов, то эквивалентная ам-
плитуда синусоидального сигнала будет больше амплитуды прямоугольного
импульса в
4
раза, что должно учитываться при расчете частотных харак-
теристик. Модуль амплитудно-фазовой характеристики определяется как от-
ношения амплитуды выходной гармоники к амплитуде входной. Фазовая ха-
рактеристика характеризует фазовый сдвиг между этими гармониками на
145
различных частотах пробного сигнала. Эти характеристики могут опреде-
ляться непосредственно по графикам входного и выходного сигналов объек-
та, либо методом синхронного детектирования.
Частотные методы определения динамических характеристик объекта
предполагают наличие двух этапов, на которых определяются:
1. Амплитудно-фазовая характеристика объекта (АФХ).
2. Передаточная функция объекта.
Амплитудно-фазовая характеристика объекта несет большую инфор-
мацию об объекте, чем его кривая разгона. Таким образом, определение ди-
намики объекта управления по его АФХ позволяет получить более точную
динамическую модель, работающую в широком диапазоне частот. Однако
при определении динамических характеристик объекта с помощью частот-
ных методов следует учитывать, что они более трудоемки и требуют наличия
специальной аппаратуры (низкочастотные генераторы периодических сигна-
лов, регистрирующая аппаратура).
В процессе проведения экспериментов по снятию АФХ желательно
предварительно определить так называемый существенный диапазон частот
объекта. Для этого необходимо найти критическую частоту колебаний
k
объекта, т. е. частоту, на которой входная и выходная гармоники колеблются
в противофазе.
Для экспериментального определения частоты
k
рекомендуется ис-
пользовать метод двухпозиционного регулирования неполным притоком. Ра-
бочий диапазон частот эксперимента (6 – 7 точек) рекомендуется выбирать
из соотношения
min max
0,5 , 2,5
kk
.
По виду полученной в результате построения АФХ выбирается нужный
вид передаточной функции объекта управления.
На втором этапе необходимо определить такие параметры модели объ-
екта, чтобы АФХ модели как можно точнее соответствовала АФХ реального
объекта.
Определение параметров объекта управления методом наимень-
ших квадратов
Этот метод предполагает, что используются массивы значений вход-
ных и выходных сигналов объекта, снятых через некоторый интервал време-
ни
K
T
– период квантования. Во входном сигнале объекта должна присутст-
вовать как постоянная, так и пробная составляющие. Постоянная составляю-
щая определяет положение рабочей точки процесса, в окрестности которой и
производит определение параметров динамической модели объекта. Учиты-
146
вая, что используются дискретные значения входа и выход, необходимо ра-
ботать с цифровыми (дискретными) моделями объекта.
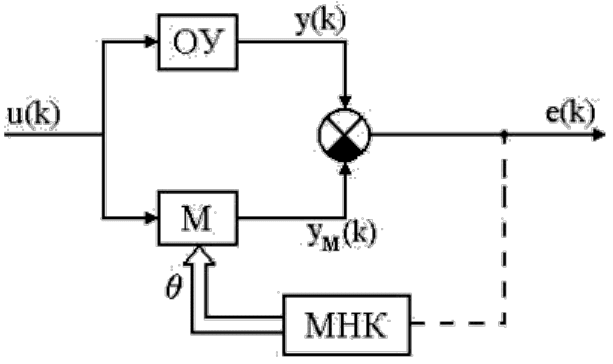
Рассмотрим методику применение метода наименьших квадратов на
примере цифровой модели первого порядка, заданной в виде:
( ) ( 1) ( 1)
m
y k ay k bu k
. (7.9)
Структурная схема эксперимента с использованием модели объекта
показана на рис. 7.5. Здесь ОУ - объект управления, М - модель объекта,
( ), ( )u k y k
– входной и выходной сигналы,
()ek
– текущая ошибка идентифика-
ции,
( ),
m
yk
– выходной сигнал модели и вектор оценки параметров.
Рисунок 7.5. Структурная схема эксперимента.
Пусть накоплено N+1 точек измерения входного и выходного сигналов
объекта. В методе наименьших квадратов обобщенная ошибка идентифика-
ции должна быть минимальна:
1
2
1
( ) min( )
N
k
E e k
. (7.10)
Раскроем выражение (7.10) в виде:
1 1 1
22
2
1 1 1
( ) ( ) ( )
N N N
m
k k k
E e k y k y k A B
, (7.11)
где
( ) ( 1), ( 1)A y k Ay k B bu k
. (7.12)
После соответствующих преобразований формулы (7.11), раскрытия
скобок и приведения подобных получим:
22
1 2 3 4 5 6
2 2 2E S aS a S bS abS b S
, (7.13)
где

147
1
2
1
0
1
2
0
1
22
3
0
1
4
0
1
5
0
1
22
6
0
( ),
2 ( ) ( 1),
( 1),
2 ( ) ( 1),
2 ( ( ) ( 1),
( 1).
N
k
N
k
N
k
N
k
N
k
N
k
S y k
S a y k y k
S a y k
S b y k u k
S ab y k u k
S b u k
(7.14)
При минимизации E необходимо определить частные производные по
параметрам а и b:
0, 0,
EE
ab
(7.15)
2 3 5
3 5 2
5 6 4
4 5 6
0,
,
или
.
0,
E
S aS bS
aS bS S
a
E aS bS S
S aS bS
b
(7.16)
Запишем выражение (7.16) в форме
,AθB
(7.17)
где
35
2
56
4
, , .
SS
S
a
SS
S
b
A θB
(7.18)
Отсюда следует формула для вычисления оценок вектора параметров
объекта управления по методу наименьших квадратов:
1
.
θ A B
(7.19)
Обратная матрица A
-1
всегда существует, так как исходная матрица A
симметричная и положительно определенная, что следует из формул (7.14).
Зная параметры дискретной модели можно определить параметры пе-
редаточной функции объекта
0
()
( ) .
1 ( )
K y p
Wp
Tp u p
(7.20)

148
Связь между параметрами дискретной модели (7.9) и передаточной
функции (7.20) определяется формулами:
, (1 ).
k
TT
a e b K a
(7.21)
Отсюда следует, что
,.
ln( ) 1
k
T
b
TK
aa
(7.22)
При использовании МНК, получаемые оценки вычисляются с некото-
рыми ошибками, которые называются смещением оценок. Для получения
достаточно представительных результатов необходимо выполнить ряд усло-
вий:
1. Подавать на вход объекта управления какой-либо пробный тести-
рующий сигнал, достаточно богатый в спектральном отношении. Такой сиг-
нал эквивалентен подаче на объект большого множества различных гармони-
ческих составляющих, что позволяет оценить достаточно большую полосу
частот АФХ объекта.
2. Объем исследуемой выборки N должен быть достаточным для полу-
чения представительных оценок, причем, чем меньше уровень пробного сиг-
нала, тем больше должно быть число N.
3. С увеличением уровня шумов на выходе объекта точность оценок
снижается. Смещение оценок возникает и при охвате исследуемого объекта
обратной связью через регулятор, т.к. в этом случае возникает корреляцион-
ная связь между входом и выходом объекта, которая и приводит к смещению
оценок.
Учет запаздывания в объекте управления приводит к появлению за-
держки в управляющем сигнале на М периодов квантования:
( ) ( 1) ( 1 ),y k a k bu k M
(7.23)
где
int( )
K
MT
(int(x) – операция получения целой части значения x).
В связи с этим, наряду с оценкой параметров а и b необходимо опреде-
лить и величину задержки M. Это можно сделать путем нахождения глобаль-
ного минимума обобщенной ошибки идентификации E для различных вели-
чин задержки M = 0…M
max
при использовании одного и того же массива дан-
ных.
149
ЛЕКЦИЯ №8. ПРОЕКТИРОВАНИЕ СИСТЕМ АВТО-
МАТИЗАЦИИ (ПРОДОЛЖЕНИЕ)
ВЫБОР ОПТИМАЛЬНОГО СОСТАВА ЭЛЕМЕНТОВ АСУ
Для современных технологических процессов (ТП) характерно:
– наличие значительного числа разнообразных факторов, влияющих на
ТП:
– большое число внутренних связей между параметрами ТП и их слож-
ное взаимовлияние;
– наличие нескольких конкурирующих направлений процессов, имею-
щих различные выходные данные;
– воздействие на ТП большого числа неконтролируемых и неуправляе-
мых факторов, играющих роль возмущений.
Изучение и оптимизация таких сложных ТП невозможны без примене-
ния современной методики моделирования процессов на базе ЭВМ.
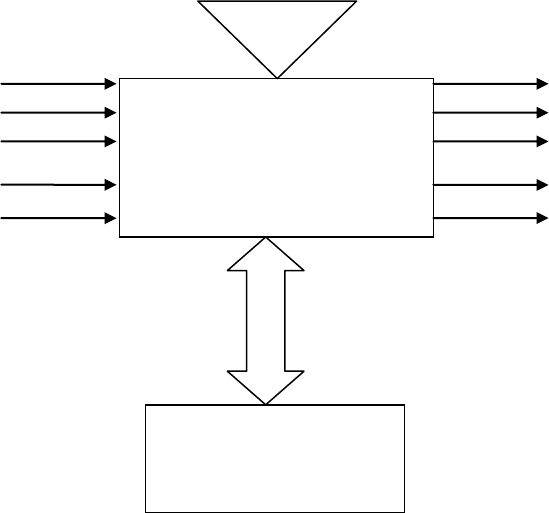
Современная технологическая система (ТС) – это совокупность
взаимосвязанных потоков энергии, материалов и информации, действующая
как единое целое, в которой осуществляется определенная последователь-
ность технологических процессов. Совокупность физико-химических про-
цессов внутри технологической системы можно рассматривать как преобра-
зование вводимых потоков энергии и вещества (рис. 8.1). Для обеспечения
требуемых физико-химических превращений в ходе выполнения техноло-
гических процессов этими потоками необходимо управлять.
Технологическим системам свойственны признаки сложных сис-
тем:
– наличие общей цели функционирования (выпуск продукции);
– большое количество элементов, составляющих систему и большое
количество параметров , характеризующих еѐ функционирование;
– сложность поведения системы ввиду большого числа взаимосвязей
между еѐ составляющими;
– наличие внешних неконтролируемых воздействий.
Применяют два метода моделирования технологических систем: фи-
зическое и математическое.
Физическое моделирование предполагает воспроизведение объекта в
ином, более мелком масштабе и сопровождается анализом особенностей
влияния линейных размеров. Для него характерно постоянство критериев
подобия модели и объекта.
Подобие - это условие, при котором возможен количественный
перенос результатов эксперимента с модели на оригинал. Физическое мо-
делирование широко применяется при конструировании, а для анализа слож-
150
ных технологических процессов промышленного производства, применение
его зачастую затруднительно.
Рисунок 8.1 Схема сложной технологической системы.
Математическое моделирование – метод качественного и (или) коли-
чественного описания процесса с помощью математической модели.
Математические модели различны по своей природе и степени сложно-
сти так как моделируемые процессы весьма разнообразны по своей природе и
степени сложности. Все процессы по своему характеру проявления делятся
на детерминированные и стохастические.
Детерминированными называются такие процессы, параметры ко-
торых можно предсказать на основе изучения их механизма. Жесткие моде-
ли, описывающие детерминированные процессы, строятся обычно без ис-
пользования статистических вероятностных распределений.
Стохастическими процессами называются такие, параметры кото-
рых изменяются случайно под воздействием неконтролируемых дестабили-
зирующих факторов. Вероятностные модели, описывающие стохастические
процессы, строятся с использованием теории вероятности и математической
статистики .
В зависимости от характера и сложности тex или иных процессов при
их изучении могут использоваться следующие виды моделей: изоморфные
и гомоморфные.
Изоморфная модель характеризуется полным поэлементным соответст-
Технологическая сис-
тема
Система
управления
Материалы X
1
Энергия X
2
Комплектация X
3
………………
Информация X4
Y
1
Y
2
Y
3
Y
4
……
ВОЗМУЩЕНИЯ