Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.

276 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
LAYOUTS
With the possible exception of the whisker switch, the limit switch types
discussed above almost always require some method of extending their
reach and/or protecting them and the object being sensed from damaging
each other. There are many ways to do this. The next several figures
show various basic layouts that have their own benefits and problems.
In every sensor/actuator system, there is a time lag between when the
switch is tripped and when the actuator reacts. This time lag must be
taken into account, especially if the switch or object could be damaged.
Object, in this case, can mean something in the environment, or some-
thing attached to the robot that is designed to detect things in the envi-
ronment. If the time lag between contact and reaction cannot be made
short enough, the layout must provide some other means of preventing
disaster. This is done by using one of three methods.
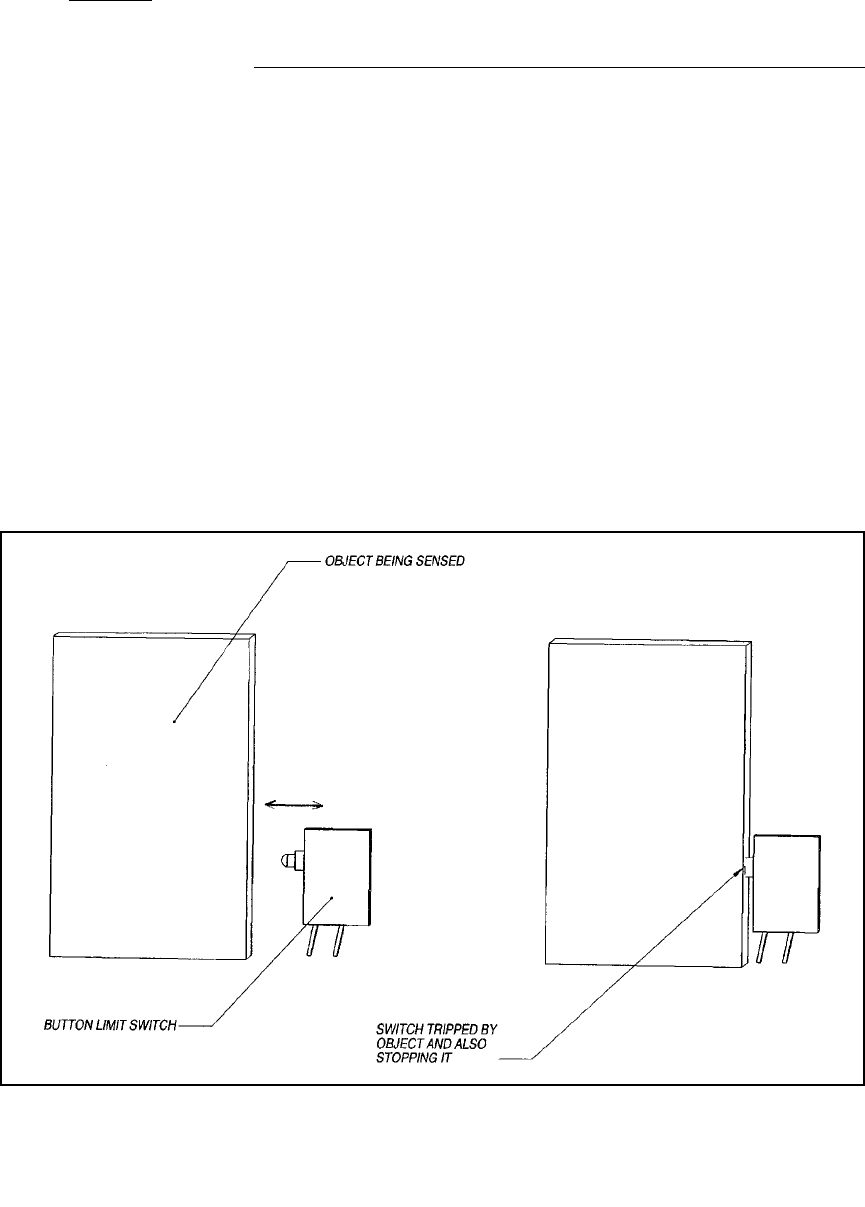
Figure11-7 Direct sensing combined with direct hard stop
Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 277
• A hard stop that is strong enough to withstand the stopping force
(and yet not damage the object) can be placed just after the trip point
of the switch.
• The layout can allow the object to pass by the switch, tripping it but
not being physically stopped by anything. The robot’s stopping
mechanism is then the main means of preventing harm.
• The travel of the sensor’s lever or button, after the sensor has been
tripped, can be made long enough to allow sufficient time for the
robot to stop.
Let’s take a look at each layout.
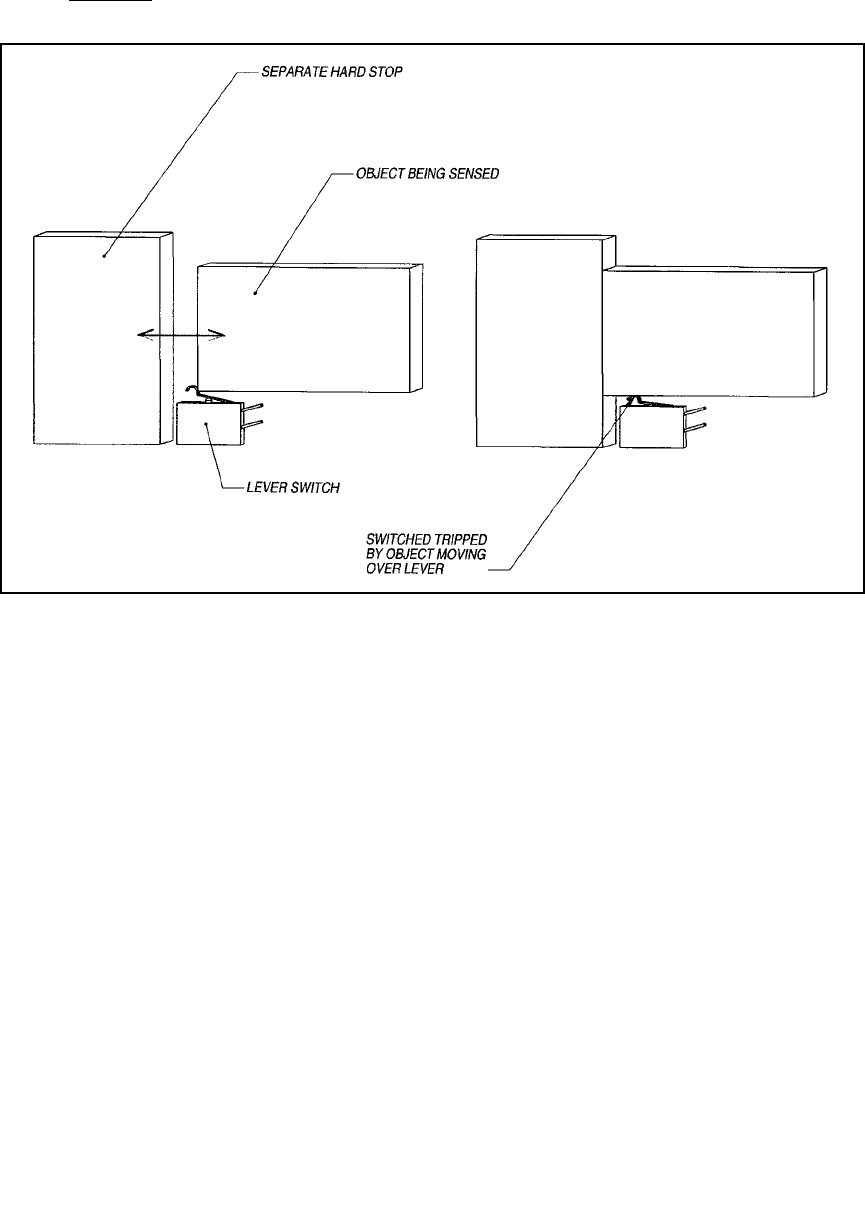
Combination Trip (Sense) and Hard Stop
This is probably the simplest layout to implement. The switch directly
stops the sensed object (Figure 11-7), which means the switch must be
strong enough to withstand repeated impacts from the thing being
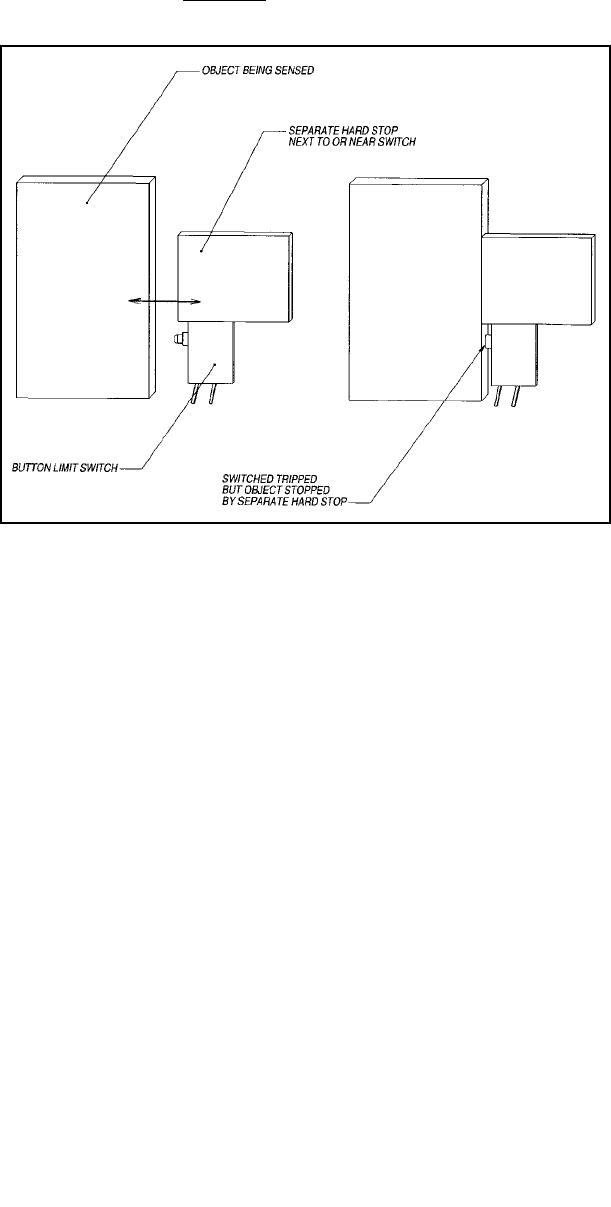
sensed. Alternatively, there is a separate hard stop that is in line with the
switch that absorbs the force of the impact after it has been tripped
(Figure 11-8). Using a switch with a long throw eases implementation,
and nearly any mechanical limit switch can be made to work with this
layout, though the button and lever designs are usually best.
Figure 11-8 Direct sensing with
separate hard stop
278 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
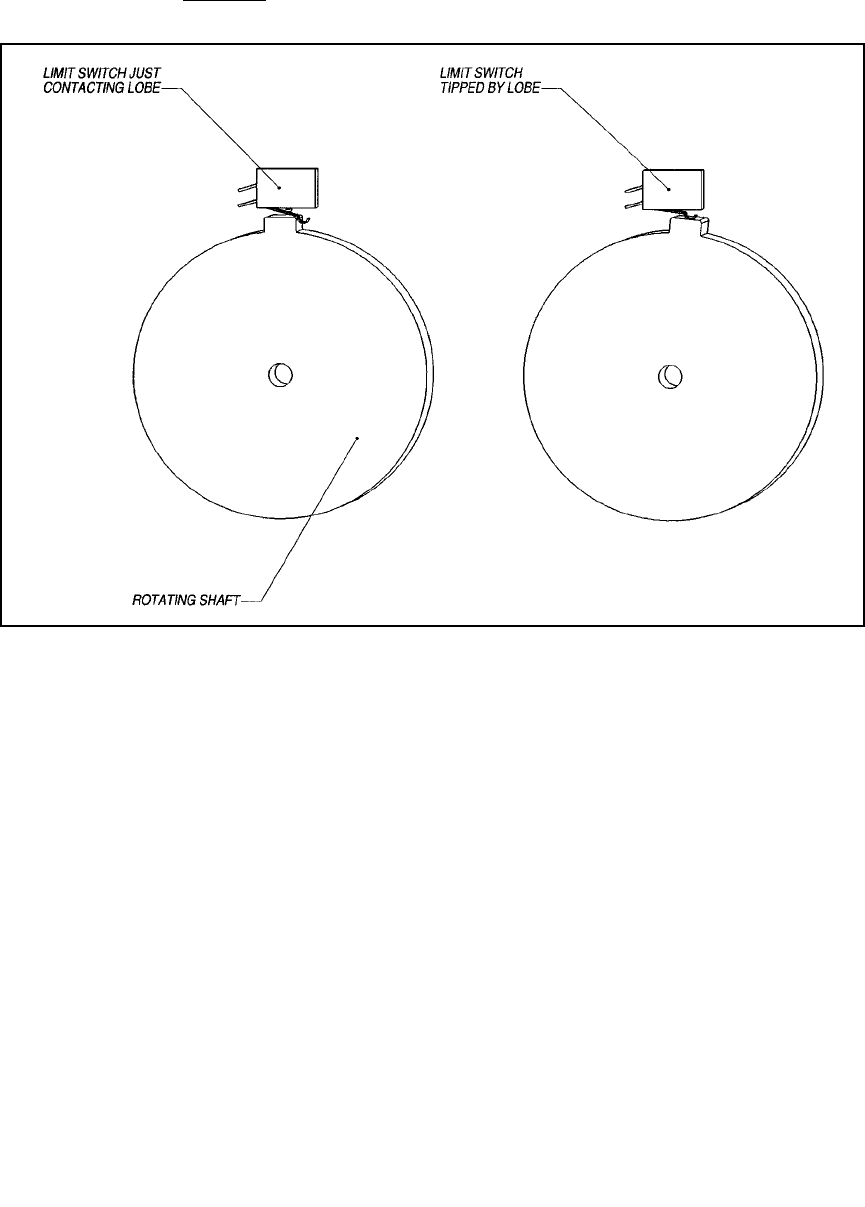
By-Pass Layouts
The by-pass layout shown in Figures 11-9 and 11-10 relieves the switch
of taking any force, but, more importantly, is less sensitive to slight vari-
ations in the positions of the switch and the sensed object, especially if a
switch with a long throw is used. Removing the hazard of impact and
reducing sensitivity make this layout both more robust and less precise.
With careful design, however, this layout is usually a better choice than
the previous layout because it requires less precision in the relationship
between the hard stop and the switch’s lever or button. Remember that
the object being sensed can be anything that is close to the robot, includ-
ing the ground.
This layout and its derivatives are the basis of virtually all mechanical
timers. They are still found in dishwashers, washing machines, and any
device where turning the knob results in an audible clicking sound as the
arm or button on the switch jumps off the lobe of the cam. They can be
stacked, as they are in appliances, to control many functions with a sin-
Figure 11-9 By-pass linear
Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 279
gle revolution of the timer. They can also be used as a very course
encoder to keep track of the revolutions or position of the shaft of a
motor or the angle of a joint in a manipulator.
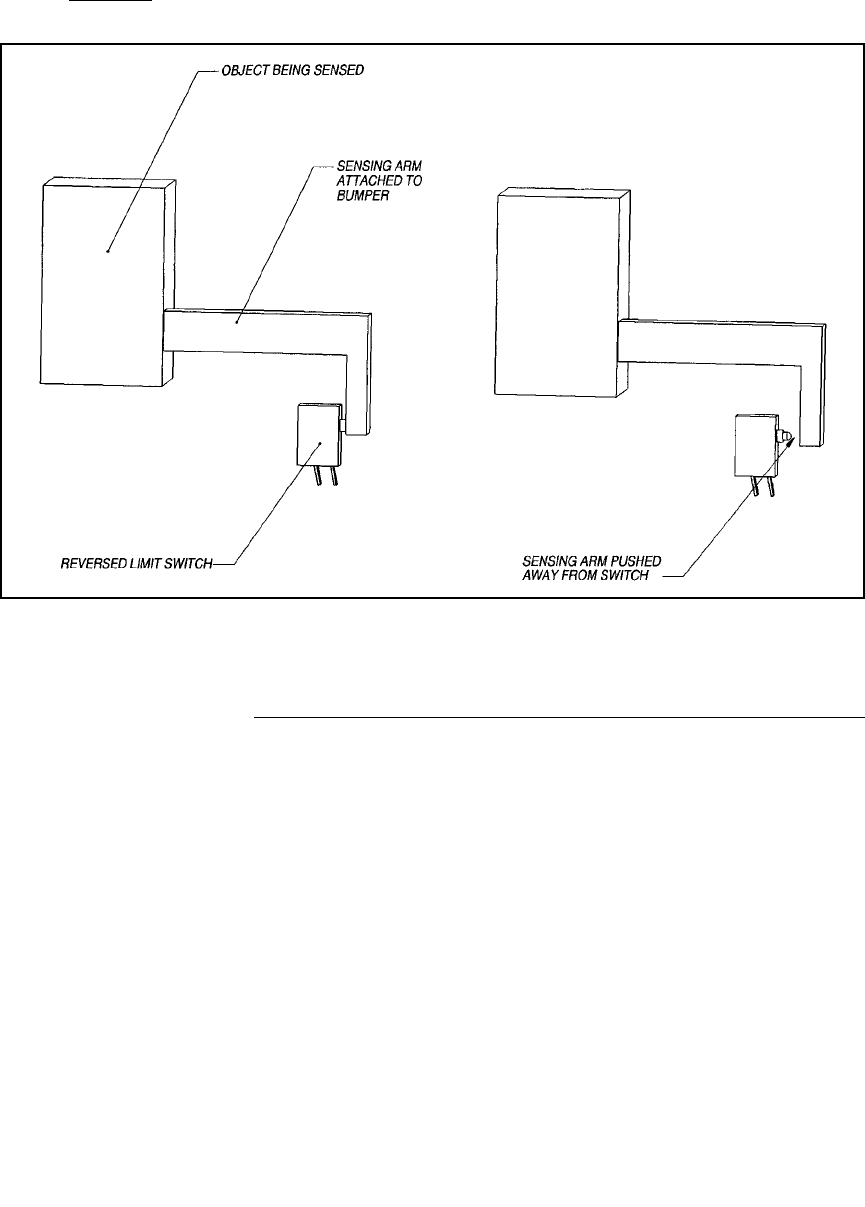
Reversed Bump
The reversed bump layout shown in Figure 11-11 is a sensitive and
robust layout. The switch is held closed by the same springs that hold the
bumper or sense lever in the correct position relative to the robot. When
an object touches the bumper, it moves the sense arm away from the
switch, releasing and tripping it. A high quality switch is tripped very
early in the travel of the sensing arm, and as far as the switch is con-
cerned, there is no theoretical limitation on how far the bumper travels
after the switch has been tripped. For this reason, it is an effective layout
for sensing bumps.
Figure11-10 Rotating cam
280 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
BUMPER GEOMETRIES AND SUSPENSIONS
The robot designer will find that no matter how many long and short
range noncontact sensors are placed on the robot, at some point, those
sensors will fail and the robot will bump into something. The robot must
have a sensor to detect collisions. This sensor may be considered redun-
dant, but it is very important. It is a last line of defense against crashing
into things.
The sensor must be designed to trip quickly upon contacting some-
thing so that the robot’s braking mechanism can have the maximum time
to react to prevent or reduce damage. To be perfectly safe, this sensor
must be able to detect contact with an object at any point on the outer
surface of the robot that might bump into something. This can be done
with a bumper around the front and sides of the robot, if the robot only
goes forward. Robots that travel in both directions must have sensors
around the entire outer surface. It is important that the bumper be large
Figure 11-11 Reversed bump

Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 281
enough so that it contacts the object before any other part of the robot
does, otherwise the robot may not know it has hit something. Some robot
designs attempt to get around this by using a measure of the current
going to the drive wheels to judge if an object has been hit, but this
method is not as reliable.
A bumper, though seemingly simple, is a difficult sensor to implement
effectively on almost any robot. It is another case in which the shape of
the robot is important as it directly affects the sensor’s design and loca-
tion. The bumper is so tricky to make effective as to be nearly impossible
on some larger robots. Unfortunately, the larger the robot, the more
important it is to be able to detect contact with things in the environment,
since the large robot is more likely to cause damage to itself or the things
it collides with. In spite of this, most large teleoperated robots have no
collision detection system at all and rely on the driver to keep from hit-
ting things. Even large autonomous robots (robots around the size of
R2D2) are often built with no, or, at most, very small bumpers.
Simplifying any part of the robot’s shape, or its behaviors, that can
simplify the design of the bumper is well worth the effort. Making the
shape simple, like a rectangle or, better yet, a circle, makes the bumper
simpler. Having the robot designed so that it never has to back up means
the bumper only has to protect the front and possibly the sides of the
robot. Having the robot travel slowly, or slowing down when other sen-
sors indicate many obstacles nearby means the bumper doesn’t have to
respond as fast or absorb as much energy when an object is hit. All these
things can be vital to the successful design of an effective bumper.
There are several basic bumper designs that can be used as starting
points in the design process. The goal of detecting contact on all outer
surfaces of the robot can be achieved with either a single large bumper,
or several smaller ones, each of which with its own sensor. These smaller
pieces have the added benefit that the robot’s brain can get some idea of
where the body is hit, which can then be useful in determining the best
direction to take to get away from the object. This can be done with a sin-
gle piece bumper, but with less sensitivity.
A clever design that absolutely guarantees the bumper will completely
cover the entire outer surface of the robot is to float the entire shell of the
robot and make it the bumper, mounted using one of the techniques
described later. Place limit switches under it to detect motion in any
direction of this all-in-one bumper/shell. This concept works well for
small robots whose shells are light enough not to cause damage to them-
selves but may be difficult to implement on larger robots.
Not only is it helpful to know the location of the bump, it is even bet-
ter to be able to detect bumps from any direction, including from above

282 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
and below. This is due to the possibility that the robot might try to drive
under something that is not quite high enough, or try to drive up onto
something and get the bottom edge of the bumper stuck, before it trips
the sensor. Both of these cases are potential showstoppers if the robot has
no idea it has hit something. This is where a bumper compliant and sen-
sitive to bumps coming from any direction is very helpful. If there is a
chance the robot will be operating in an environment where this problem
will arise, this additional degree of freedom, with sensing, makes the
bumper’s suspension system more complex but vital. Let’s start by look-
ing at the simplest case, the one-dimension sensing bumper.
SIMPLE BUMPER SUSPENSION DEVICES
The one-dimension (1D) bumper only detects bumps that hit the bumper
relatively straight on, from one direction. Although this may seem too
limiting, it can be made to work well if there are several smaller
bumpers, each with their own 1D sensor. Together they can sense a large
area of bumps from many directions. There are also layouts that are basi-
cally 1D in design, but, by being compliant, can be made to sense bumps
from arbitrary directions.
Since straight-on or nearly straight-on bumps are the most common
and produce the largest forces, it is better to use a design that allows the
bumper to have the longest travel in that direction. Bumps can be
detected around the sides of the robot without as much motion from the
bumper. This is why a compliant 1D bumper suspension can be used for
2D detection. There are many ways to attach bumpers that are basically
1D bumpers, but that can also function as 2D bumpers.
Some of these methods, or variations of them, can be used as is, with
no additional devices required. Usually, though, a secondary device must
be incorporated into the layout to positively locate the nominal position
of the bumper. This facilitates repeatable sensing by the limit switch. The
spring-centered plate layout is shown in Figure 11-14. The moving plate
is so loosely positioned it requires a vibration damper or it will wobble
constantly.
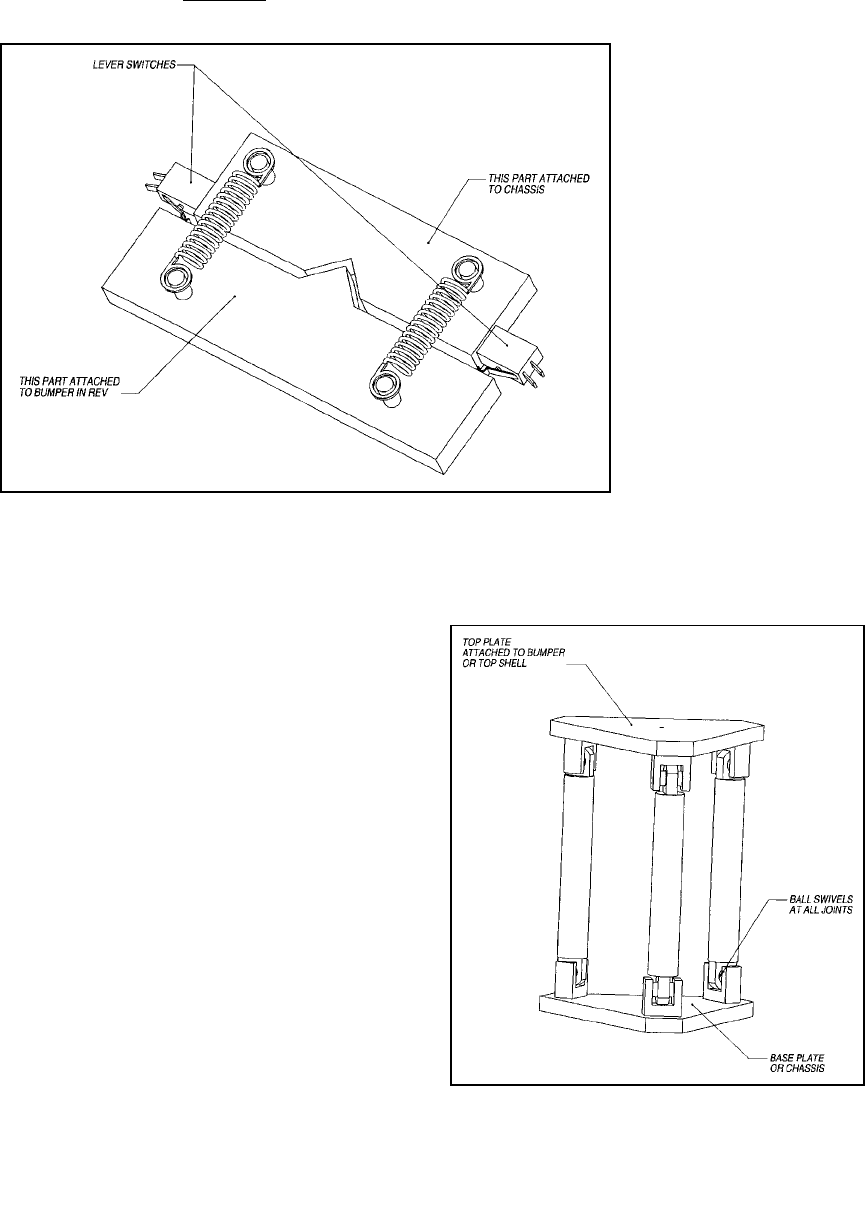
The V-groove centering block shown in Figure 11-12, is a basic
method of realigning the bumper after encountering a bump, but there
are several others that work nearly as well. The V-groove layout is essen-
tially two reversed bump limit switch layouts at 90° to each other. It is
therefore effective for bumpers designed to detect bumps from straight or
nearly straight on.
Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 283
Three Link Planar
A very useful and multipurpose mechanical link-
age is something called a four-bar link. It consists
of four links attached in the shape of a quadrilat-
eral. By varying the lengths of the links, many
motions can be generated between the links. A
3D version of this can be built by attaching two
planes (plates) together with three links so that
the plates are held parallel, but can move relative
to each other.
This could be called a five-bar link, since there
are now essentially five bars, but the term five-
bar link refers to a different mechanism entirely.
A better name might be 3D four-bar, or perhaps
three link planar. Figure 11-13 shows the basic
idea. If the base is attached to the chassis, and the
top plate is attached to the bumper or
bumper/shell, a robust layout results. This system
is under-constrained, though, and requires some
Figure 11-12 Tension spring
V-groove layout
Figure 11-13 Three link planar