Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.

244 Chapter 10 Manipulator Geometries
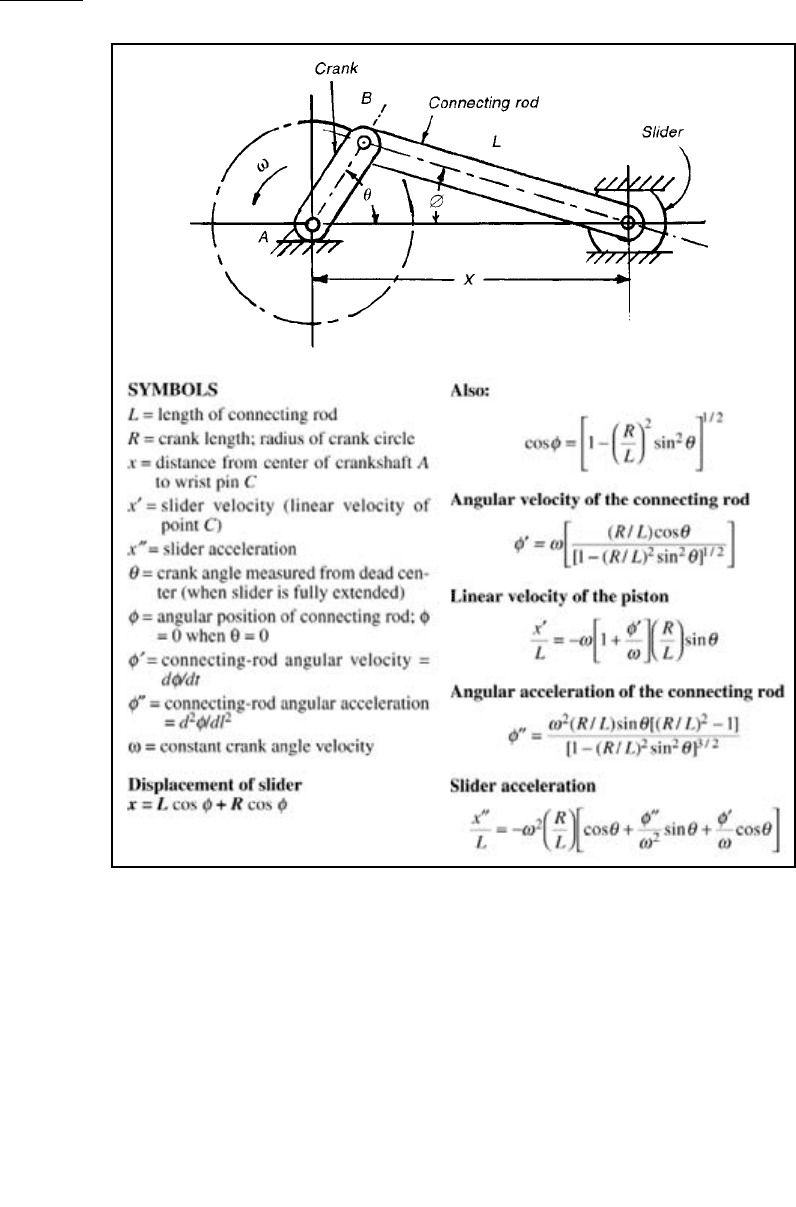
linear motion from rotary, but the slider crank is particularly effective for
use in walking robots.
The motion of the slider is not linear in velocity over its full range of
motion. Near the ends of its stroke the slider slows down, but the force
produced by the crank goes up. This effect can be put to good use as a
clamp. It can also be used to move the legs of walkers. The slider crank
should be considered if linear motion is needed in a design.
Figure 10-2 Slider Crank
Chapter 10 Manipulator Geometries 245
In order to put the slider crank to good use, a method of calculating
the position of the slider relative to the crank is helpful. The equation for
calculating how far the slider travels as the crank arm rotates about the
motor/gearbox shaft is: x = L cos Ø+ r cos Ø.
ARM GEOMETRIES
The three general layouts for three-DOF arms are called Cartesian, cylin-
drical, and polar (or spherical). They are named for the shape of the vol-
ume that the manipulator can reach and orient the gripper into any posi-
tion—the work envelope. They all have their uses, but as will become
apparent, some are better for use on robots than others. Some use all slid-
ing motions, some use only pivoting joints, some use both. Pivoting
joints are usually more robust than sliding joints but, with careful design,
sliding or extending can be used effectively for some types of tasks.
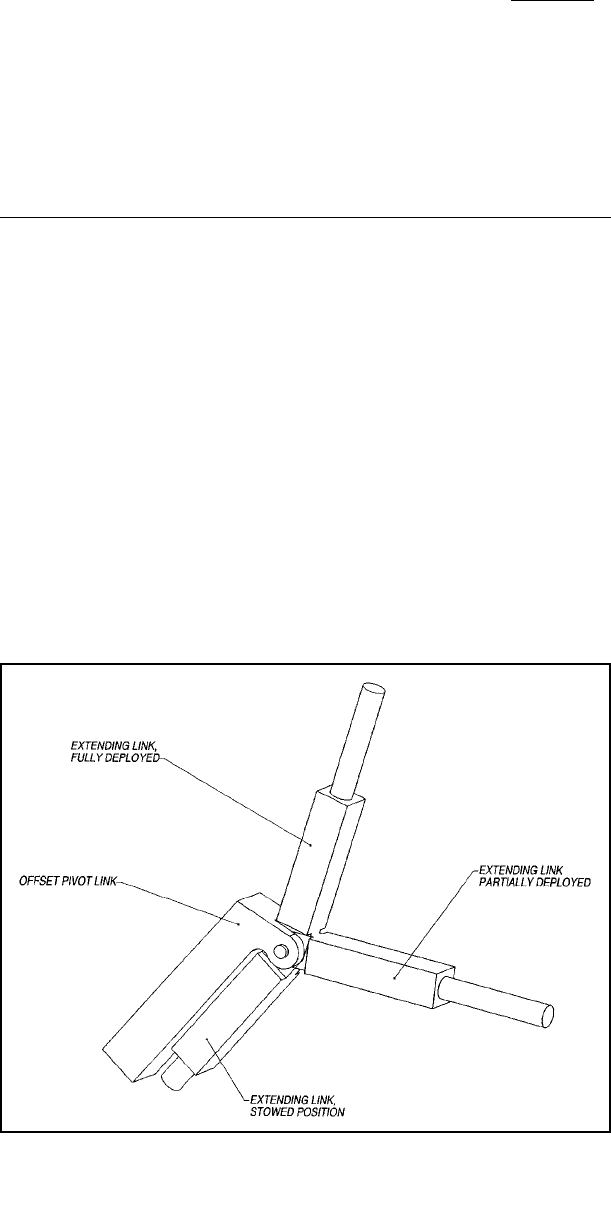
Pivoting joints have the drawback of preventing the manipulator from
reaching every cubic centimeter in the work envelope because the elbow
cannot fold back completely on itself. This creates dead spaces—places
where the arm cannot reach that are inside the gross work volume. On a
robot, it is frequently required for the manipulator to fold very com-
pactly. Several manipulator manufacturers use a clever offset joint
design depicted in Figure 10-3 that allows the arm to fold back on itself
Figure 10-3 Offset joint
increases working range of
pivoting joints
246 Chapter 10 Manipulator Geometries
180°. This not only reduces the stowed volume,
but also reduces any dead spaces. Many indus-
trial robots and teleoperated vehicles use this or a
similar design for their manipulators.
CARTESIAN OR RECTANGULAR
On a mobile robot, the manipulator almost
always works beyond the edge of the chassis and
must be able to reach from ground level to above
the height of the robot’s body. This means the
manipulator arm works from inside or from one
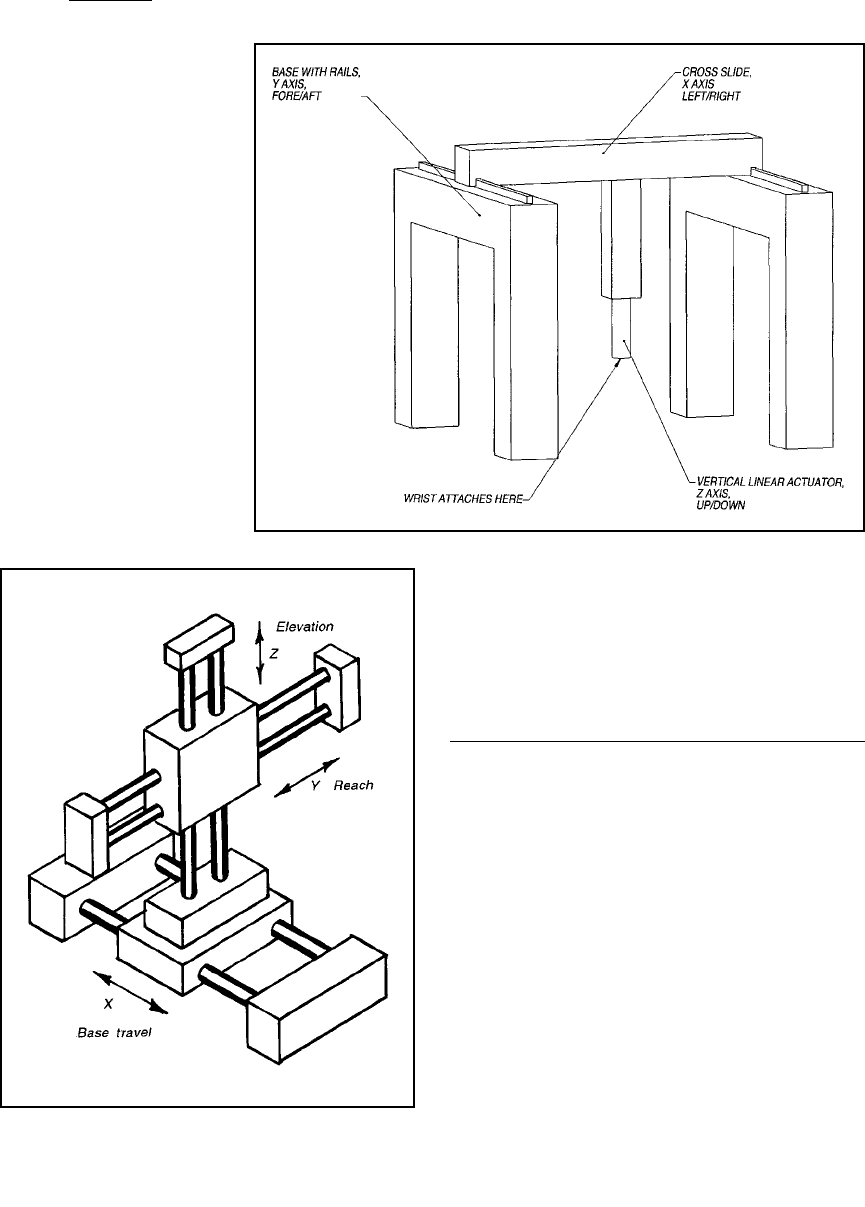
side of the work envelope. Some industrial gantry
manipulators work from outside their work enve-
lope, and it would be difficult indeed to use their
layouts on a mobile robot. As shown in Figure
10-4, gantry manipulators are Cartesian or rec-
tangular manipulators. This geometry looks like
a three dimensional XYZ coordinate system. In
fact, that is how it is controlled and how the
working end moves around in the work envelope.
There are two basic layouts based on how the
Figure 10-4 Gantry, simply
supported using tracks or slides,
working from outside the work
envelope.
Figure 10-5 Cantilevered manipulator geometry
Chapter 10 Manipulator Geometries 247
arm segments are supported, gantry and can-
tilevered.
Mounted on the front of a robot, the first two
DOF of a cantilevered Cartesian manipulator can
move left/right and up/down; the Y-axis is not
necessarily needed on a mobile robot because the
robot can move back/forward. Figure 10-5 shows
a cantilevered layout with three DOF. Though not
the best solution to the problem of working off
the front of a robot, it will work. It has the benefit
of requiring a very simple control algorithm.
CYLINDRICAL
The second type of manipulator work envelope is
cylindrical. Cylindrical types usually incorporate
a rotating base with the first segment able to tele-
scope or slide up and down, carrying a horizon-
tally telescoping segment. While they are very
simple to picture and the work envelope is fairly
intuitive, they are hard to implement effectively
because they require two linear motion segments,
both of which have moment loads in them caused
by the load at the end of the upper arm.
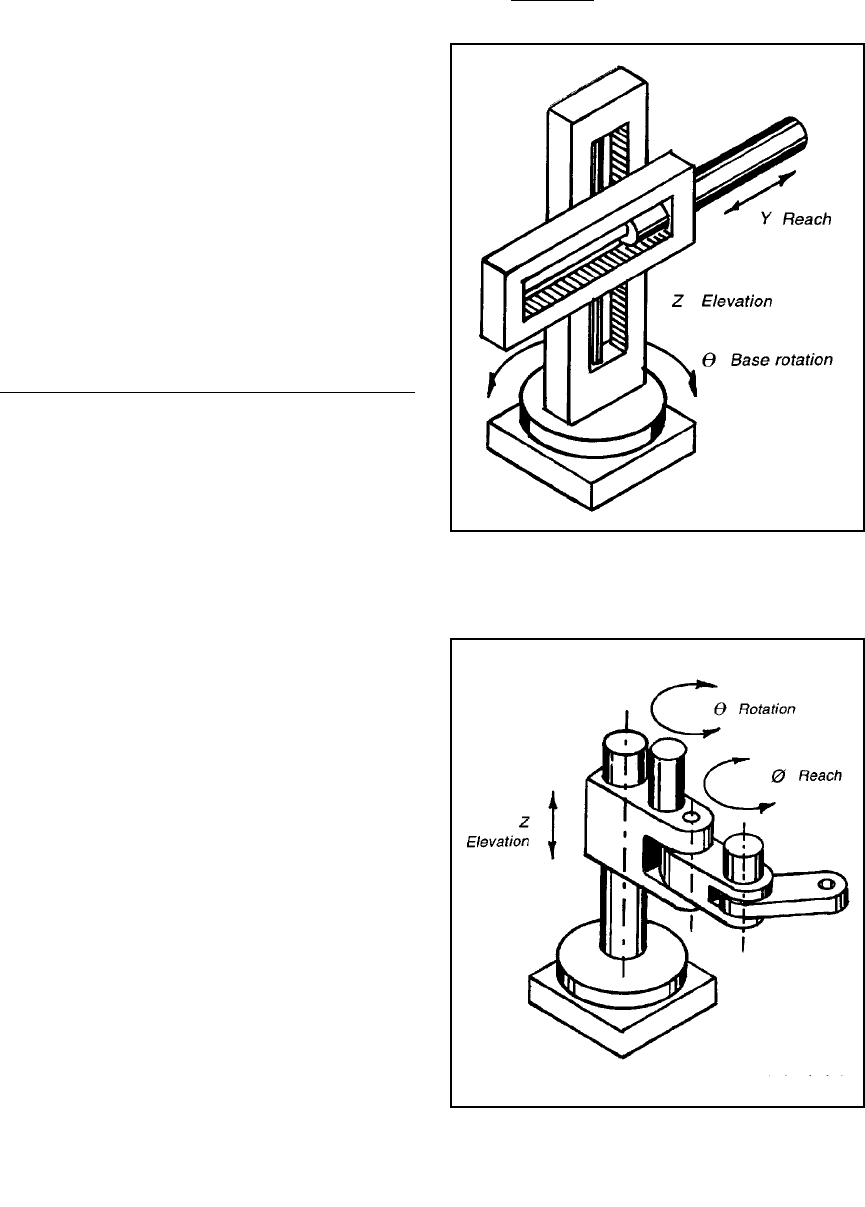
In the basic layout, the control code is fairly
simple, i.e., the angle of the base, height of the
first segment, and extension of the second seg-
ment. On a robot, the angle of the base can sim-
ply be the angle of the chassis of the robot itself,
leaving the height and extension of the second
segment. Figure 10-6 shows the basic layout of a
cylindrical three-DOF manipulator arm.
A second geometry that still has a cylindrical
work envelope is the SCARA design. SCARA
means Selective Compliant Assembly Robot
Arm. This design has good stiffness in the verti-
cal direction, but some compliance in the hori-
zontal. This makes it easier to get close to the
right location and let the small compliance take
up any misalignment. A SCARA manipulator
replaces the second telescoping joint with two
vertical axis-pivoting joints. Figure 10-7 shows a
SCARA manipulator.
Figure 10-6 Three-DOF cylindrical manipulator
Figure 10-7 A SCARA manipulator
248 Chapter 10 Manipulator Geometries
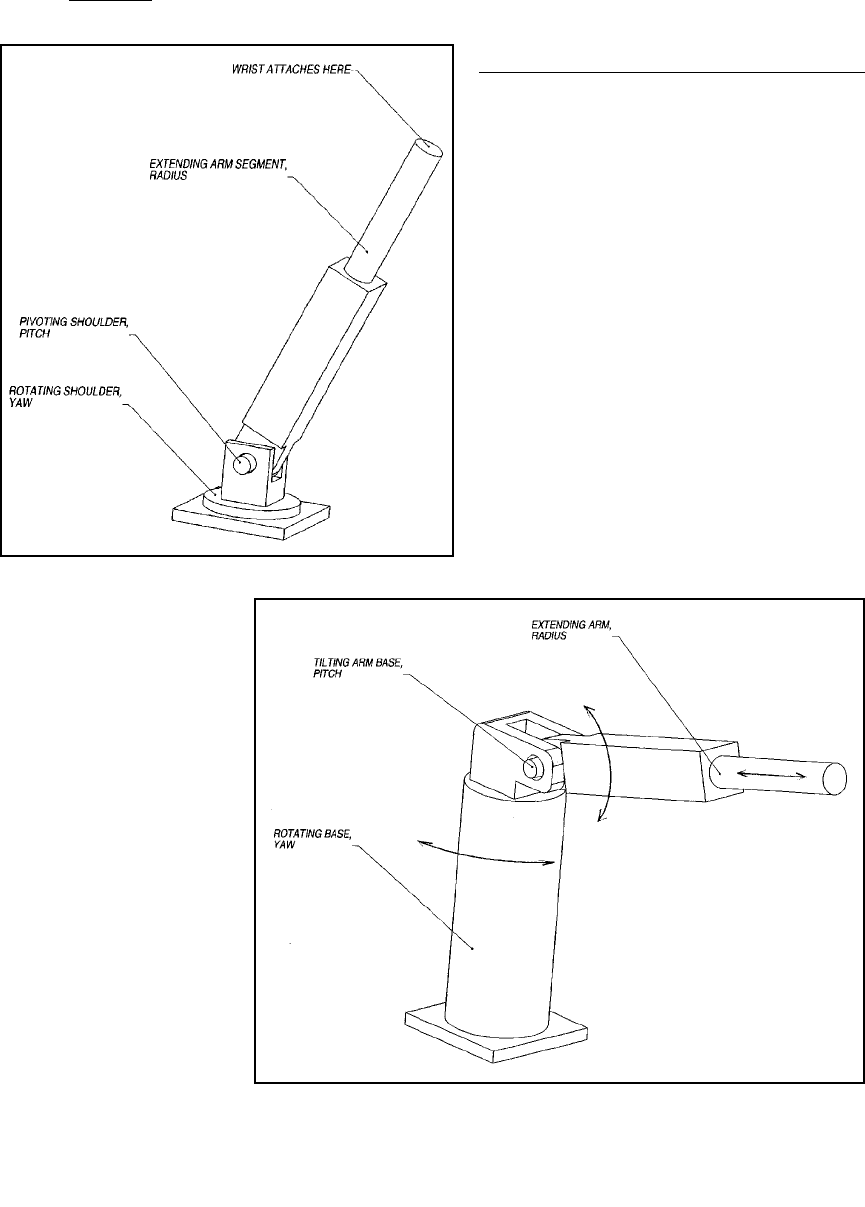
POLAR OR SPHERICAL
The third, and most versatile, geometry is the
spherical type. In this layout, the work envelope
can be thought of as being all around. In real-
ity, though, it is difficult to reach everywhere.
There are several ways to layout an arm with
this work envelope. The most basic has a rotat-
ing base that carries an arm segment that can
pitch up and down, and extend in and out
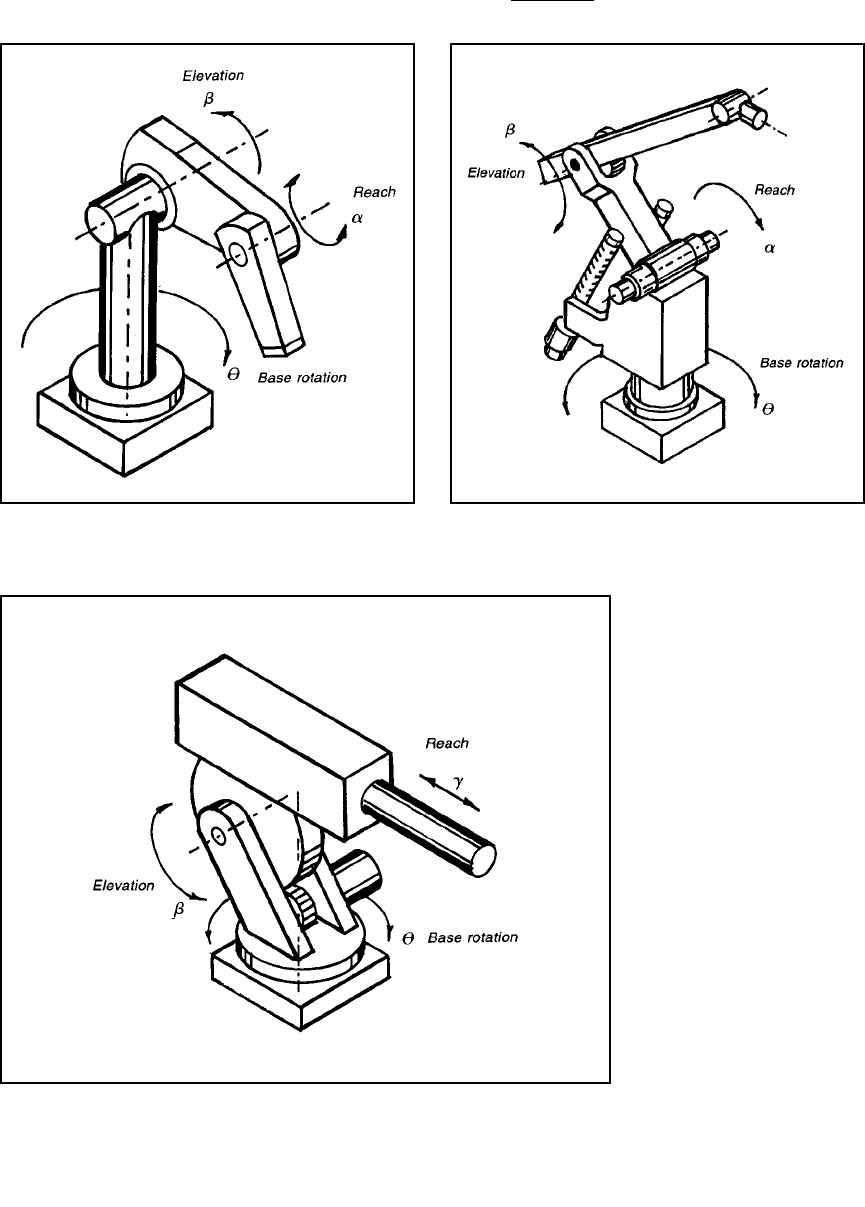
(Figure 10-8). Raising the shoulder up (Figure
10-9) changes the envelope somewhat and is
worth considering in some cases. Figures 10-10,
10-11, and 10-12 show variations of the spher-
ical geometry manipulator.
Figure 10-8 Basic polar
coordinate manipulator
Figure 10-9 High shoulder
polar coordinate manipulator
with offset joint at elbow
Chapter 10 Manipulator Geometries 249
Figure 10-10 High shoulder polar coordinate manipulator
with overlapping joints
Figure 10-11 Articulated polar coordinate manipulator
Figure 10-12 Gun turret polar
coordinate manipulator
250 Chapter 10 Manipulator Geometries
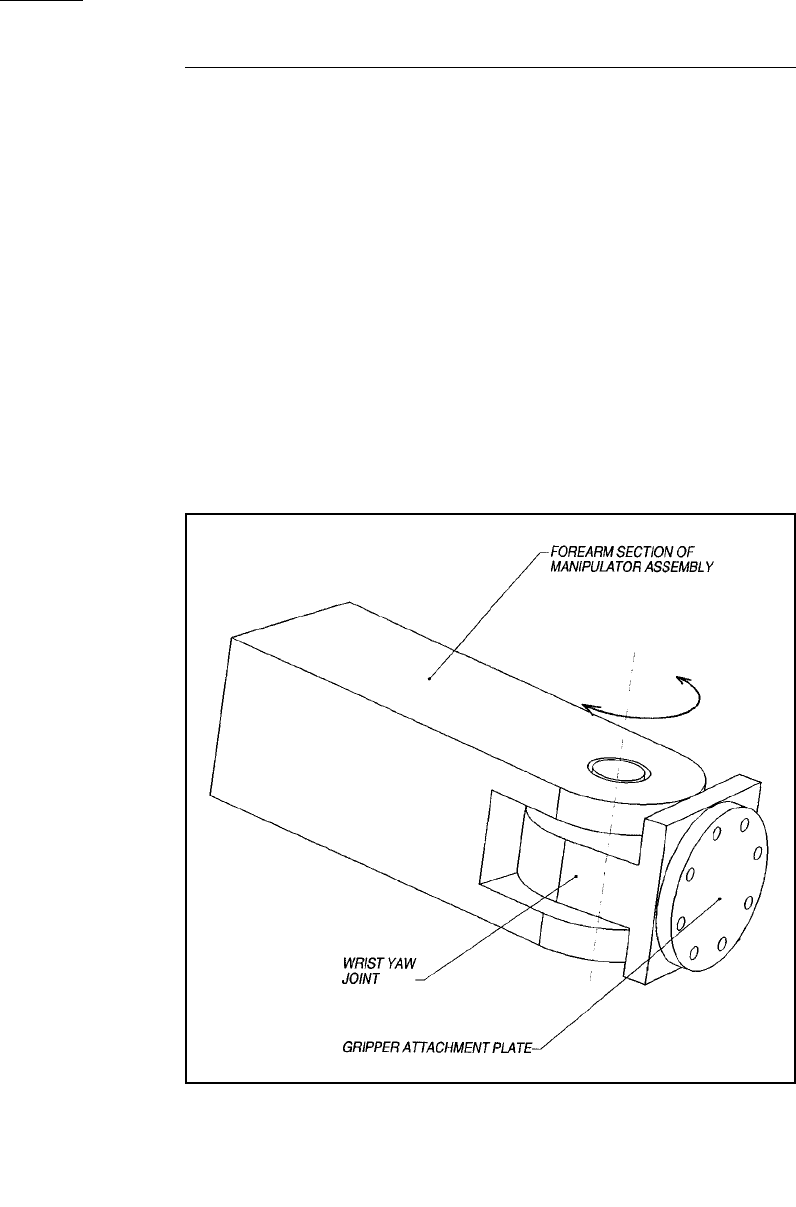
THE WRIST
The arm of the manipulator only gets the end point in the right place. In
order to orient the gripper to the correct angle, in all three axes, a second
set of joints is usually required—the wrist. The joints in a wrist must
twist up/down, clockwise/counter-clockwise, and left/right. They must
pitch, roll, and yaw respectively. This can be done all-in-one using a ball-
in-socket joint like a human hip, but controlling and powering this type is
difficult.
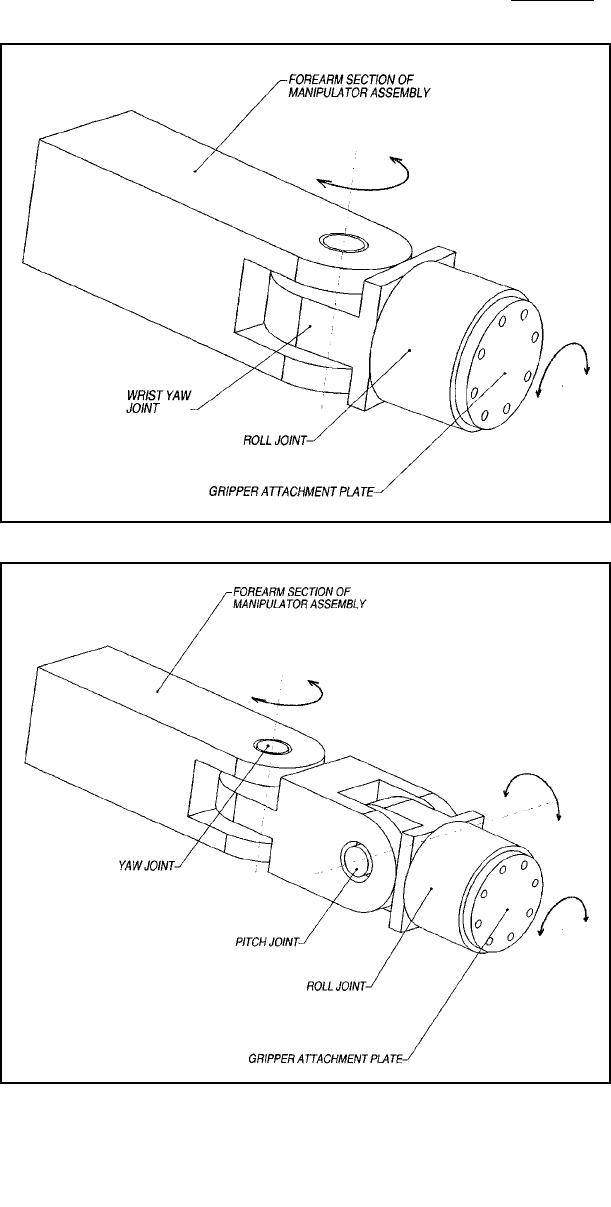
Most wrists consist of three separate joints. Figures 10-13, 10-14, and
10-15 depict one, two, and three-DOF basic wrists each building on the
previous design. The order of the degrees of freedom in a wrist has a
large effect on the wrist’s functionality and should be chosen carefully,
especially for wrists with only one or two DOF.
Figure 10-13 Single-DOF wrist
(yaw)
Chapter 10 Manipulator Geometries 251
Figure 10-14 Two-DOF wrist
(yaw and roll)
Figure 10-15 Three-DOF wrist
(yaw, roll, and pitch)
252 Chapter 10 Manipulator Geometries
GRIPPERS
The end of the manipulator is the part the user or robot uses to affect
something in the environment. For this reason it is commonly called an
end-effector, but it is also called a gripper since that is a very common
task for it to perform when mounted on a robot. It is often used to pick up
dangerous or suspicious items for the robot to carry, some can turn door-
knobs, and others are designed to carry only very specific things like
beer cans. Closing too tightly on an object and crushing it is a major
problem with autonomous grippers. There must be some way to tell how
hard is enough to hold the object without dropping it or crushing it. Even
for semi-autonomous robots where a human controls the manipulator,
using the gripper effectively is often difficult. For these reasons, gripper
design requires as much knowledge as possible of the range of items the
gripper will be expected to handle. Their mass, size, shape, and strength,
etc. all must be taken into account. Some objects require grippers that
have many jaws, but in most cases, grippers have only two jaws and
those will be shown here.
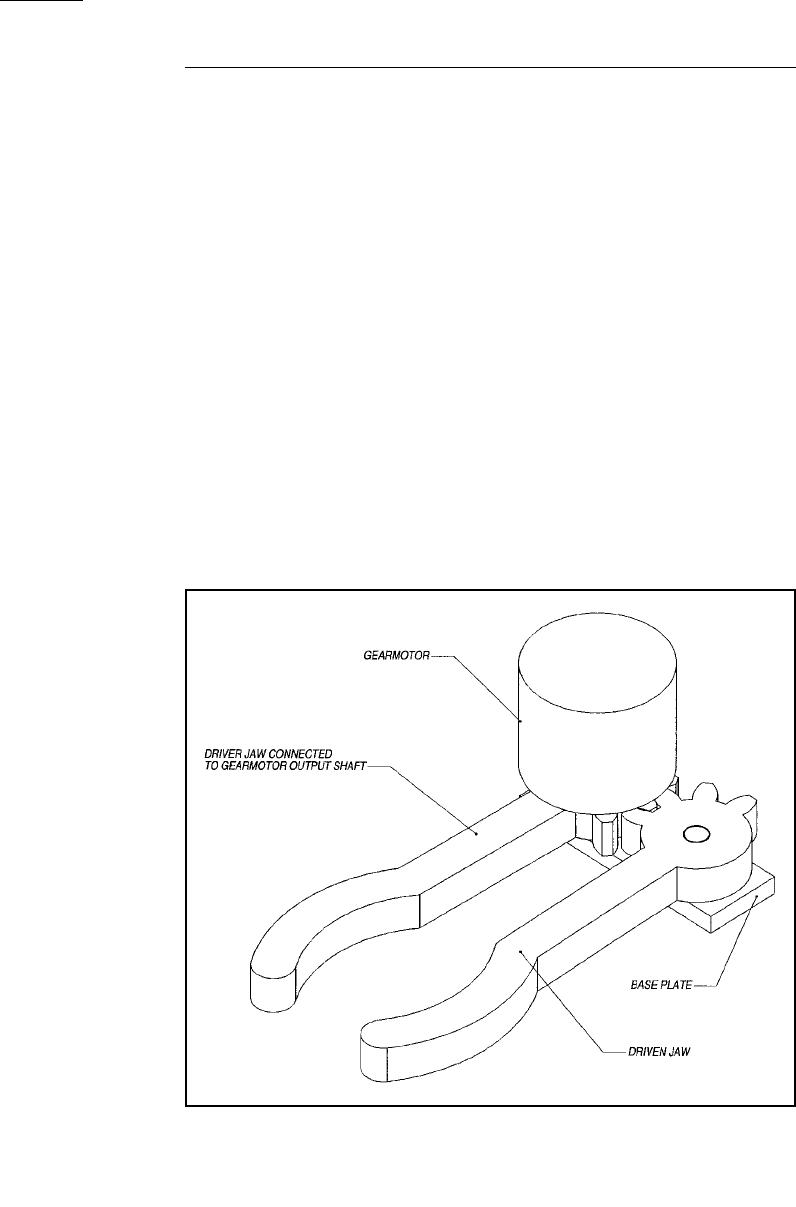
There are several basic types of gripper geometries. The most basic
type has two simple jaws geared together so that turning the base of one
Figure 10-16 Simple direct
drive swinging jaw
Chapter 10 Manipulator Geometries 253
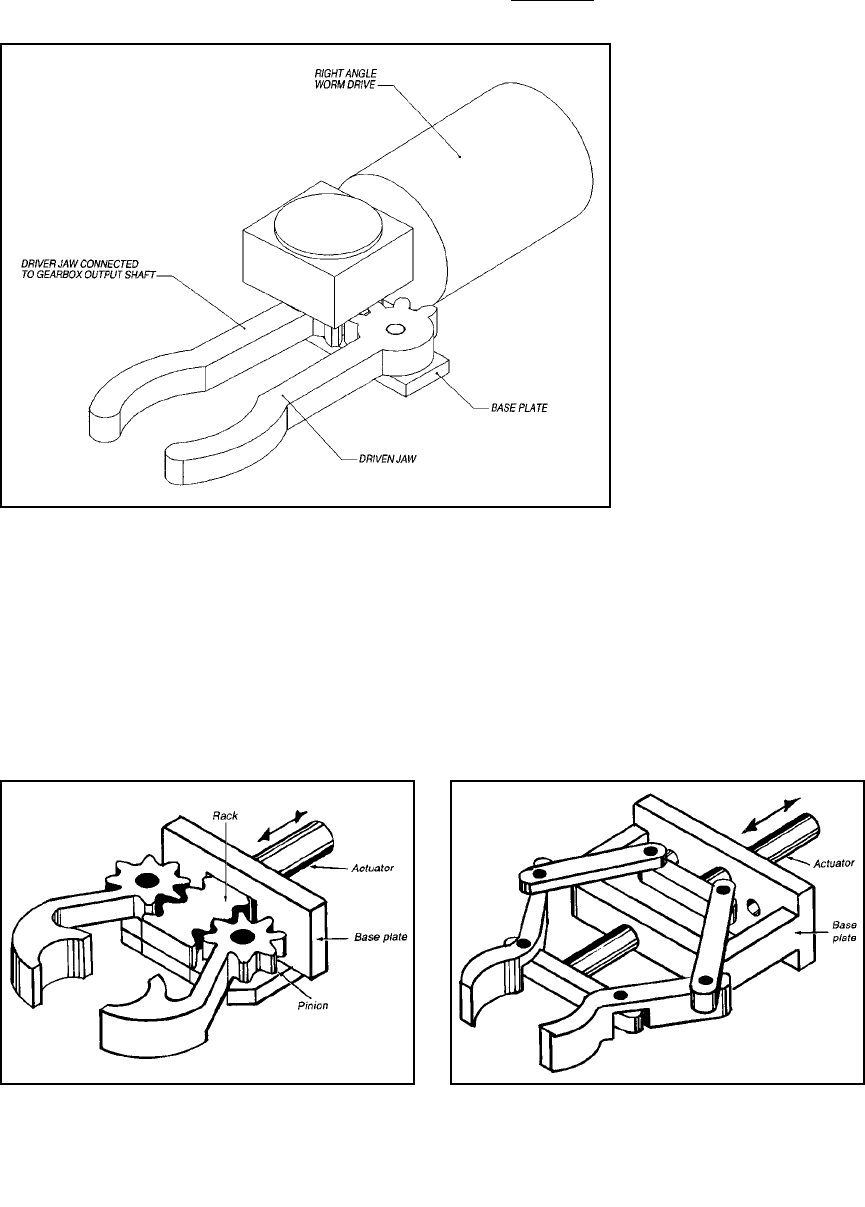
turns the other. This pulls the two jaws together. The jaws can be moved
through a linear actuator or can be directly mounted on a motor gear-
box’s output shaft (Figure 10-16), or driven through a right angle drive
(Figure 10-17) which places the drive motor further out of the way of the
gripper. This and similar designs have the drawback that the jaws are
always at an angle to each other which tends to push the thing being
grabbed out of the jaws.
Figure 10-17 Simple direct
drive through right angle worm
drive gearmotor
Figure 10-18 Rack and pinion drive gripper Figure 10-19 Reciprocating lever gripper