Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.


This page intentionally left blank.

M
echanical limit switches are devices that sense objects by being
either directly or indirectly touched by the object. Most use a
button, lever, whisker, or slide as their local sensor. Two other types
that warrant their own categories are the magnetic reed switch and the
membrane switch, which is much like a long button actuated switch.
On a robot, the switch alone can be the whole sensor, but in most cases
the switch makes up only a part of a sensor package.
The limit switch can be thought of as a device that has at least one
input and one output. The input is the button, lever, whisker, or slide
(or for the magnetic type, anything ferrous nearby). The output is
almost always closing or opening an electric circuit. There are several
other types of limit switches whose inputs and outputs are different
than those discussed above, but only those that sense by direct contact
or use magnets will be included here. Other types are not strictly
mechanical and are more complex and beyond the scope of this book.
In a robot, there are two general categories of things that the robot’s
microprocessor needs to know about, many of which can be sensed by
mechanical limit switches. The categories are proprioceptive and envi-
ronmental. Proprioceptive things are part of the robot itself like the
position of the various segments of its manipulator, the temperature of
its motors or transistors, the current going to its motors, the position of
its wheels, etc. Environmental things are generally outside the robot
like nearby objects, ambient temperature, the slope of the surface the
robot is driving on, bumps, or drop-offs, etc. This is an over-simplified
explanation because in several cases, the two categories overlap in one
way or another. For instance, when the bumper bumps up against an
object, the object is in the environment (environmental sensing) but the
bumper’s motion and location, relative to the robot, is detected by a
limit switch mounted inside the robot’s body (proprioceptive sensing).
In this book, anything that is detected by motion of the robot’s parts is
considered proprioceptive, whether the thing being sensed is part of the
robot or not.
265

266 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
These two categories subject the switch to very different problems.
Proprioceptive sensors usually live in a fairly controlled environment.
The things around them and the things they sense are all contained
inside the robot, making their shape unchanging, moving generally in
the same direction, and with the same forces. This makes them easier to
implement than environmental sensors that must detect a whole range
of objects coming from unpredictable directions with a wide range of
forces. Environmental sensing switches, especially the mechanical type,
are often very difficult to make effective and care must be taken in their
design and layout.
Mechanical limit switches come in an almost infinite variety of
shapes, sizes, functions, current carrying capacity, and robustness. This
chapter will focus on layouts and tripping mechanisms in addition to the
switches themselves. Some switch layouts have the lever, button,
whisker, or slide directly moved by the thing being sensed. Others con-
sist of several components which include one or more switches and
some device to trip them. In fact, several of the tripping devices shown
in this chapter can also be used effectively with non-mechanical
switches, like break-beam light sensors. The following figures show
several basic layouts. These can be varied in many ways to produce
what is needed for a specific application.
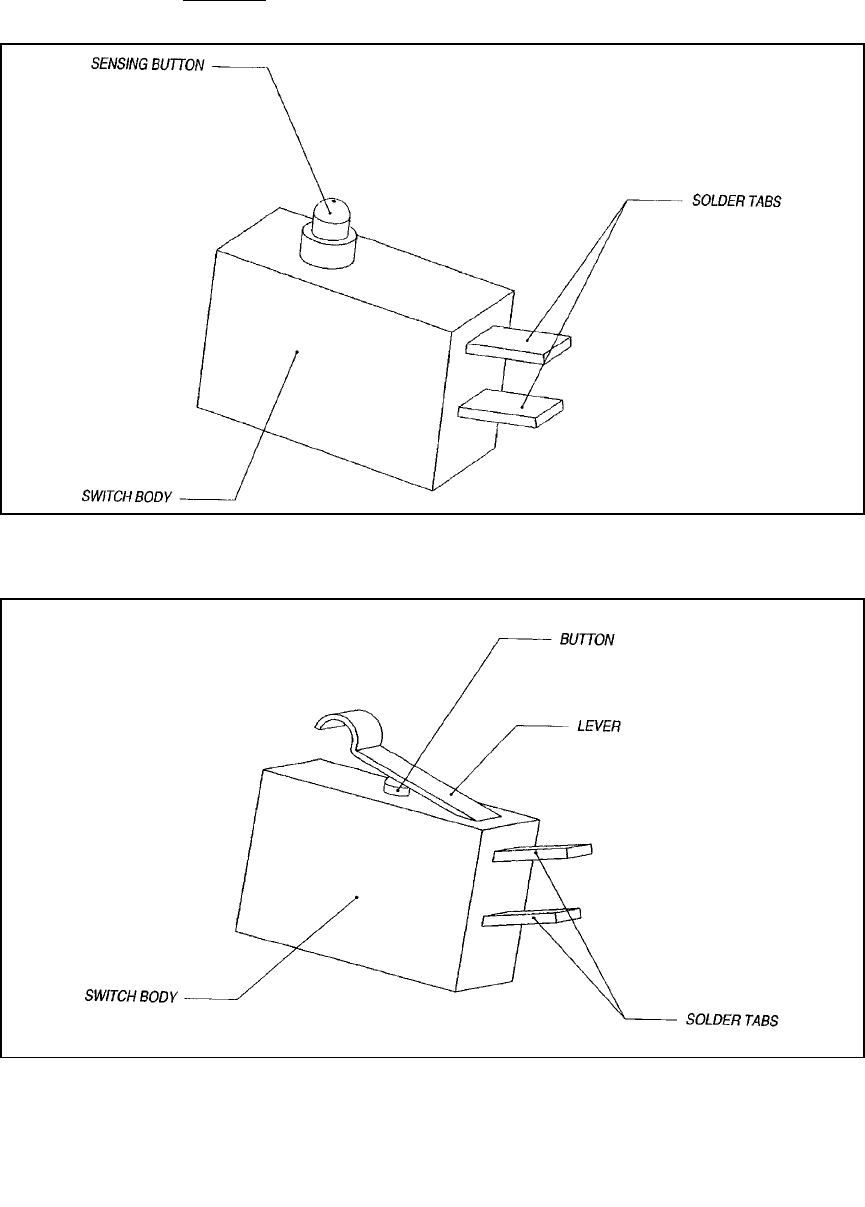
The simplest form of mechanical limit switch is the button switch
(Figure 11-1) It has a button protruding from one side that moves in and
out. This opens and closes the electrical contacts inside the switch. The
button switch is slightly less robust than the other switch designs
because the button must be treated with care or else it might be pushed
too hard, breaking the internal components, or not quite inline with its
intended travel direction, breaking the button off. It is, theoretically, the
most sensitive, since the button directly moves the contacts without any
other mechanism in the loop. Some very precise button limit switches
can detect motions as small as 1mm.
The lever switch is actually a derivative of the button switch and is
the most common form of limit switch. The lever comes in an almost
limitless variety of shapes and sizes. Long throw, short throw, with a
roller on the end, with a high friction bumper on the end, single
direction, and bidirection are several of the common types. Figure
11-2 shows the basic layout. Install whatever lever is needed for the
application.
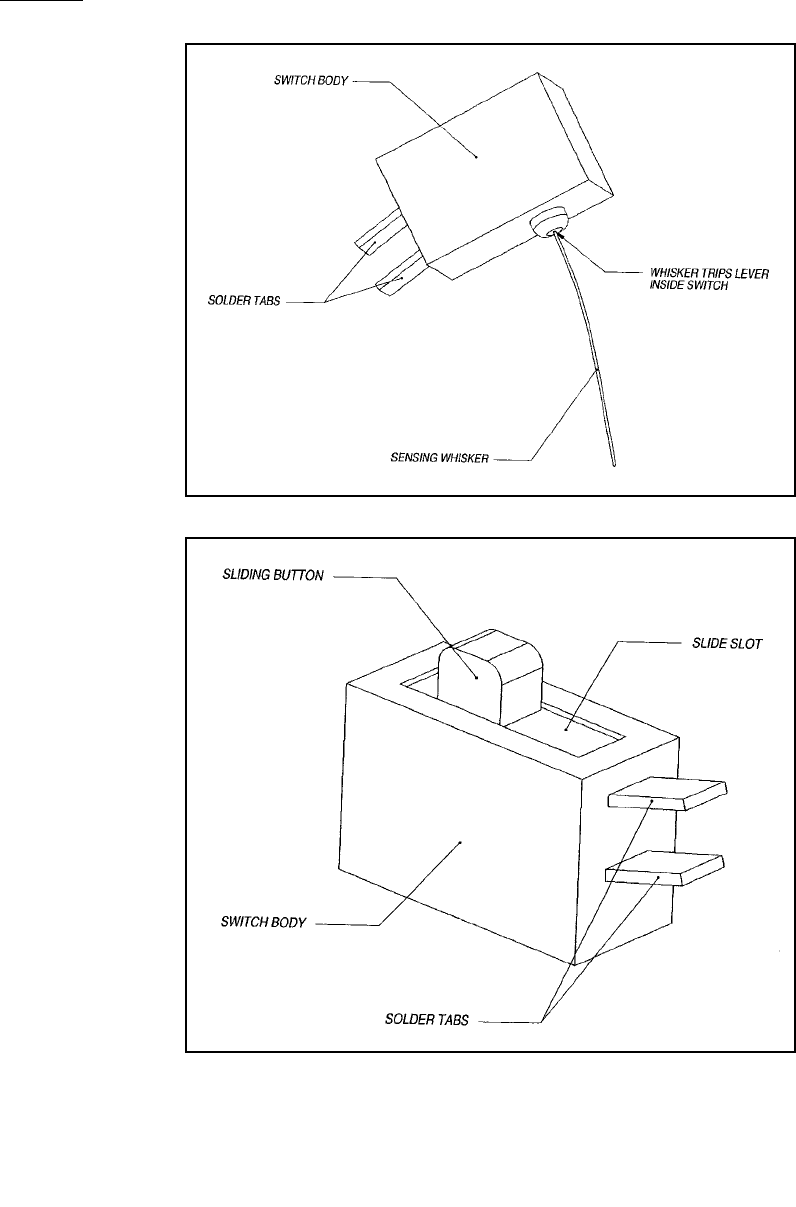
The whisker or wobble switch is shown separately in Figure 11-3
even though it is really just another form of lever switch. The whisker
looks and functions very much like the whiskers on a cat and, like a cat,
the whisker directly senses things in the environment. This makes it
Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 267
Figure 11-1 Button Switch
Figure 11-2 Lever Switch
268 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
Figure 11-3 Whisker Switch
Figure 11-4 Slide Switch

Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 269
more robust and easier to incorporate, but it is also much less precise
since the sensing arm is necessarily flexible.
The whisker has the special property of detecting an object from
any direction, making it distinctly different from lever switches. Since
it bends out of the way of the sensed object, neither the object nor the
switch is damaged by impact. This trick can also be done with a
roller-ended lever arm, but more care is needed when using a rigid
arm than with the flexible whisker. Figure 11-3 shows a basic whisker
switch.
The last basic type of limit switch is the slide switch. This switch has
a different internal mechanism than the button switch and its variations,
and is considered less reliable. It is also difficult to implement in a robot
and is rarely seen. Figure 11-4 shows a slide switch.
Magnetic limit switches come in several varieties and have the advan-
tage of being sealed from contamination by dirt or water. The most com-
mon design has a sensitive magnet attached to a hinged contact so that
when a piece of ferrous metal (iron) is nearby on the correct side of the
switch, the magnet is drawn towards a mating contact, closing the elec-
tric circuit. All of the mechanical limit switches discussed in the follow-
ing sections can incorporate a magnetic limit switch with some simple
modification of the layouts. Just be sure that the thing being sensed is
ferrous metal and passes close enough to the switch to trip it. Besides
being environmentally sealed, these switches can also be designed to
have no direct contact, reducing wear.
There are several ways to increase the area that is sensed by a mechan-
ical limit switch. Figures 11-5 and 11-6 show basic layouts that can be
expanded on to add a large surface that moves, which the switch then
senses. There is also a form of mechanical switch whose area is inher-
ently large. This type is called a membrane switch. These switches usu-
ally are in the shape of a long rectangle, since the internal components
lend themselves to a strip shape. Membrane switches come with many
different contact surfaces, pressure ratings (how hard the surface has to
be pushed before the switch is tripped), and some are even flexible. For
some situations, they are very effective.
The huge variety of limit switches and the many ways they can be
used to sense different things are shown on the following pages in
Figures 11-5 and 11-6. Hopefully these pictures will spur the imagina-
tion to come up with even more clever ways mechanical limit switches
can be used in mobile robots.
270 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
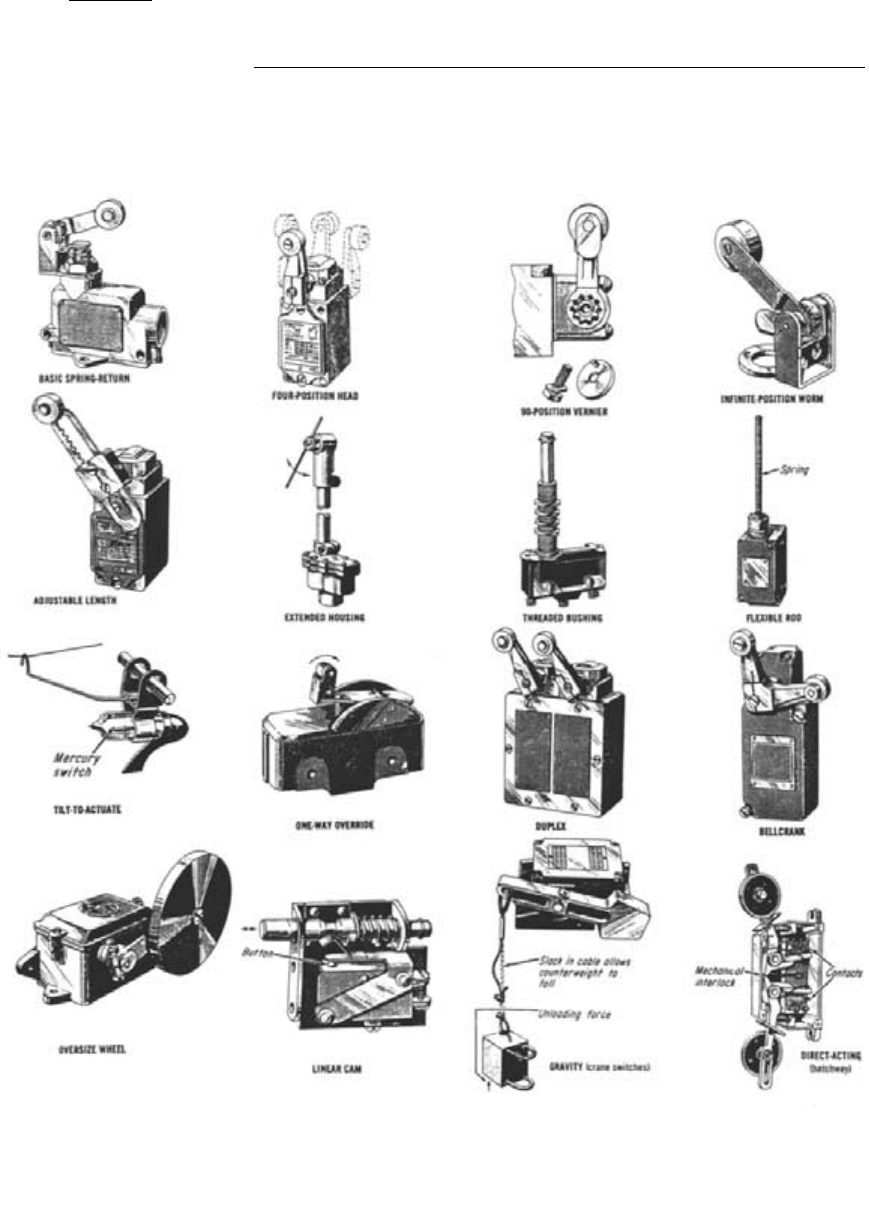
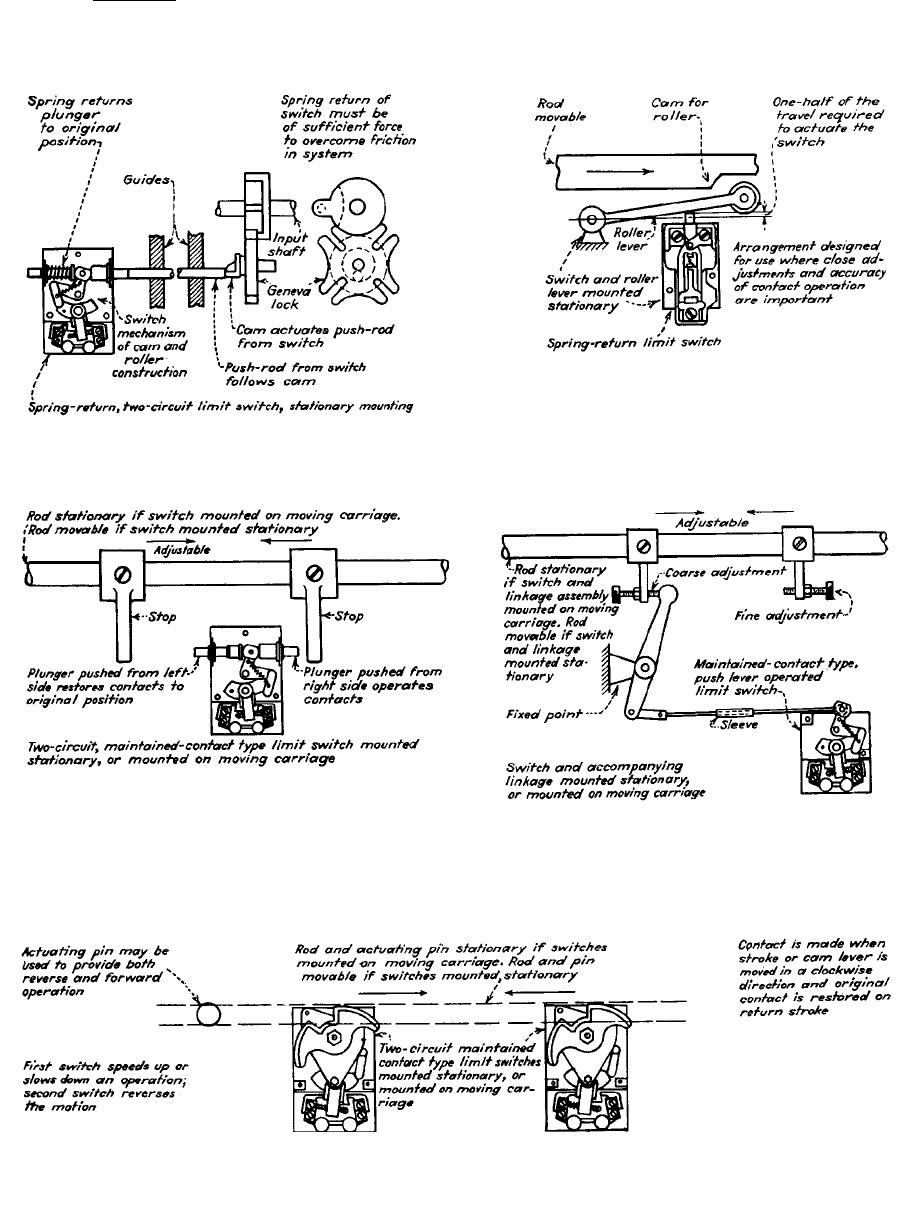
INDUSTRIAL LIMIT SWITCHES
Actuators Linear Mechanical Switches
Figure 11-5a Mechanical, Geared, and Cam Limit Switches
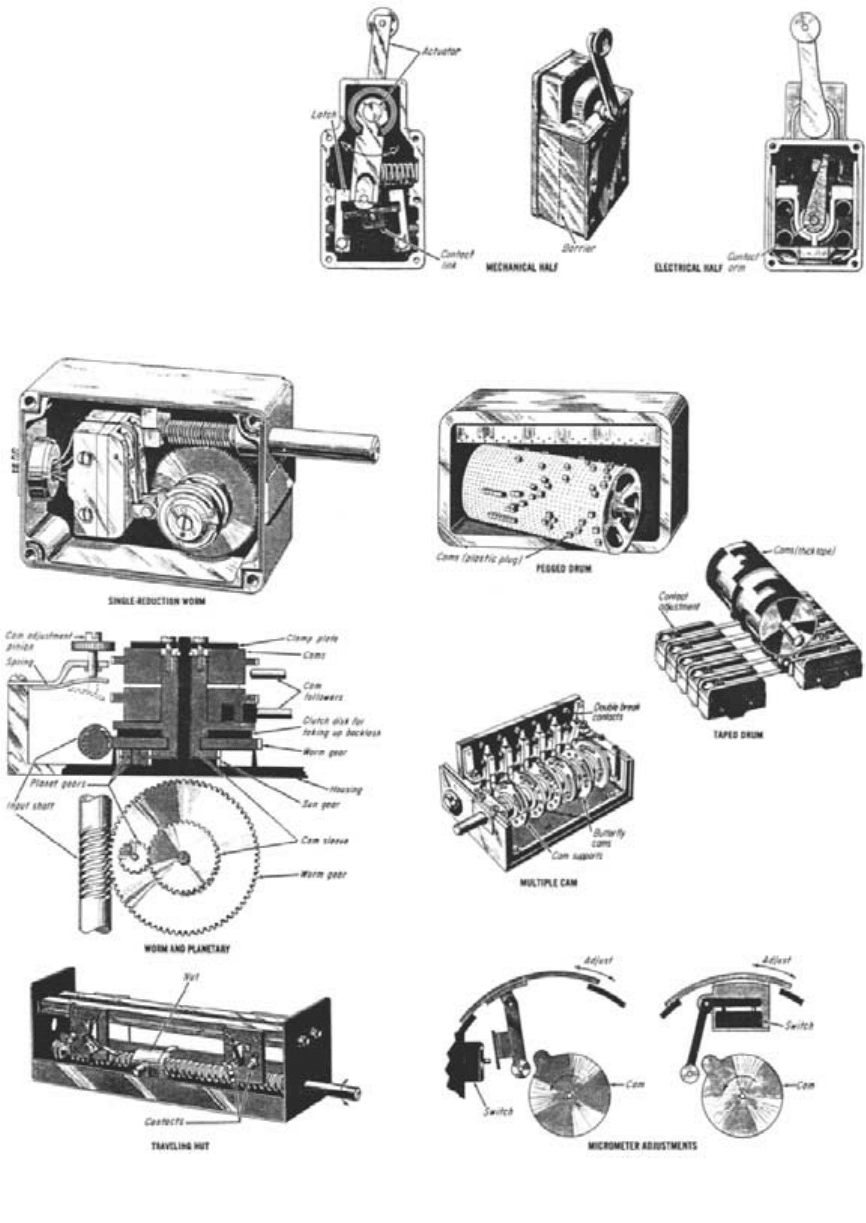
Latching Switch
with Contact Chamber
Geared Rotary Limit Switches
Rotary-Cam Limit Switches
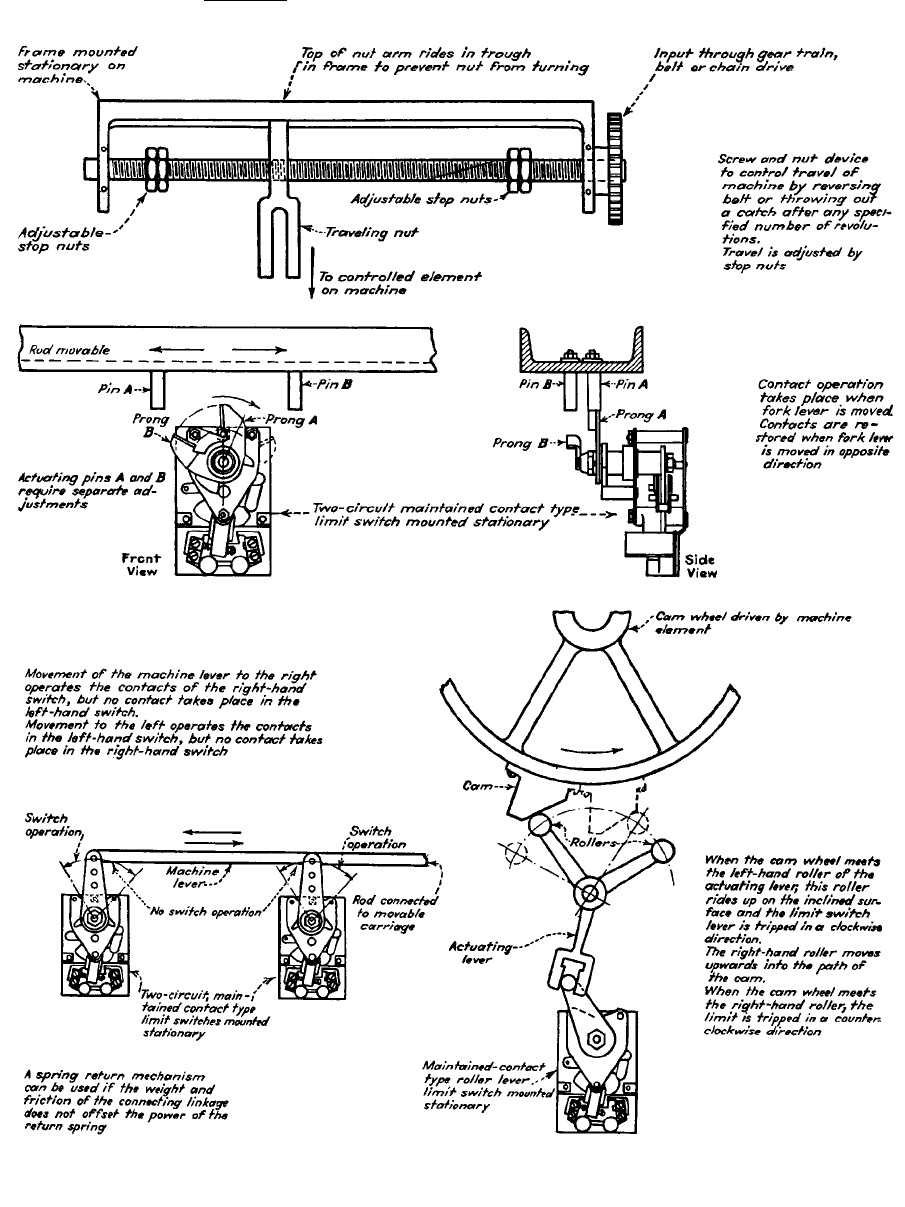
Figure 11-5b Mechanical, Geared, and
Cam Limit Switches
272 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices
Figure 11-6 Limit Switches in Machinery
Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 273