Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.


234 Chapter 9 Comparing Locomotion Methods
really, that can climb slopes that a wheeled or tracked vehicle simply
could not get up. Negotiable slope angle is therefore important, but it
should be assumed that the material in ground contact is the same no
matter what type of mobility system is used.
Obstacles
Obstacles can also be scaled, but they create a special case. The effec-
tiveness of the mobility system could be judged almost entirely by how
high, relative to its elevation area, an obstacle it can negotiate. Obstacle
negotiation is a little more complicated than that but it can be simplified
by dividing it into three subcategories.
• Mobility system overall height to negotiable obstacle height
• System length to negotiable obstacle height
• System elevation area to negotiable obstacle height
The comparison obstacle parameters can be defined to be the height of
a square step the system can climb onto and the height of a square topped
wall the system can climb over without high centering, or otherwise
becoming stuck.
An inverted obstacle, a chasm, is also significant. Negotiable chasm
width is mostly a function of the mobility system’s length, but some
clever designs can vary their length somewhat, or shift their center of
gravity, to facilitate crossing wider chasms. For systems that can vary
their length, negotiable chasm width should be compared using the sys-
tem’s shortest overall length. For those that are fixed, use the overall
length.
Another facet of obstacle negotiation is turning width. This is impor-
tant because a mobility system with a small turning radius is more likely
to be able to get out of or around confining situations. Turning width is
not directly a function of vehicle width, but is defined as the narrowest
alley in which the vehicle can turn around. This is in contrast to ratings
given by some manufacturers that give turning radius as the radius of a
circle defined as the distance from the turning point to the center of the
vehicle width. This can be misleading because a very large vehicle that
turns about its center can be said to have a zero-radius turning width.
A turning ability parameter must also show how tightly a vehicle can
turn around a post, giving some idea how well it could maneuver in a for-
est of closely spaced trees. There are, then, two width parameters, alley
width and turning-around-a-post width.

Chapter 9 Comparing Locomotion Methods 235
COMPLEXITY
A more nebulous comparison criteria that must be included in an evalua-
tion of any practical mechanical device is its inherent complexity. A
common method for judging complexity is to count the number of mov-
ing parts or joints. Ball or roller bearings are usually counted as one part
of a joint although there may be 10s of balls or rollers moving inside the
bearing. A problem with this method is that some parts, though moving,
have very small forces on them or operate in a relatively hazard-free
environment and, so, last a very long time, sometimes even longer than
nonmoving parts in the same system.
A second method is to count the number of actuators since their num-
ber relates to the number of moving parts and they are the usually the
source of greatest wear. The drawback of this method is that it ignores
passive moving parts like linkages that may well cause problems or wear
out before an actively driven part does. The first method is probably a
better choice because robots are likely to be moving around in com-
pletely unpredictable environments and any moving part is equally sus-
ceptible to damage by things in the environment.
Speed and Cost
There are two other comparison parameters that could be included in a
comparison of mobility methods. They are velocity of the moving vehi-
cle and cost of the locomotion system. Moving fast over rough and
unpredictable terrain places large and complex loads on a suspension
system. These loads are difficult to calculate precisely because the ter-
rain can be so unpredictable. Powerful computer simulation programs
can predict a suspension system’s performance with a moderate degree
of accuracy, but the suspension system still must always be tested in the
real world. Usually the simulation program’s predictions are proven
inaccurate to a significant degree. It is too difficult to accurately predict
and design for a specific level of performance at speeds not very far
above eight m/s to have any useful meaning. It is assumed that slowing is
an acceptable way to increase mobility, and that slowing can be done
with any suspension design. Mobility is not defined as getting over an
obstacle at a certain speed; it is simply getting over the obstacle at what-
ever speed works.
Cost can be related to size, weight, and complexity. Fewer, smaller,
and lighter parts are usually cheaper. The design time to get to the sim-
plest, lightest design that meets the criteria may be longer, but the end
cost will usually be less. Since cost is closely related to size, weight, and

236 Chapter 9 Comparing Locomotion Methods
complexity, it does not need to be included in a comparison of suspen-
sion and drive train methods.
THE MOBILITY INDEX COMPARISON METHOD
Another, perhaps simpler, method is to create an index of the mobility
design’s capabilities listed as a set of ratios relating the mobility system’s
length, height, width, and possibly complexity, to a small set of terrain
parameters. The most useful set would seem to be obstacle height, cre-
vasse width, and narrowest alley in which the vehicle can turn around.
Calculating the vehicle’s ground pressure would cover mobility in sand
or mud. The pertinent ratios would be:
• Step/Elevation Area: Negotiable step height divided by the elevation
area of mobility system
• Step/System Height: Highest negotiable wall or platform, whichever
is shorter, divided by mobility system height
• Crevasse/System Length: Negotiable crevasse width divided by vehi-
cle length (in the case of variable geometry vehicles, the shortest
length of the mobility system)
• System Width/Turning diameter: Vehicle width divided by outermost
swept diameter of turning circle
• System Width/Turning-Around-a-Post Width: Vehicle width divided
by width of path it sweeps when turning around a very thin post
• Ground Pressure
These are all set up so that a higher ratio number means theoretically
higher mobility. No doubt, some mobility system designs will have very
high indexes in some categories, and low indexes in others. Having a sin-
gle Mobility Index for each mobility system design would be convenient,
but it would be difficult to produce one that describes the system’s abili-
ties with enough detail to be useful. These six, however, should give a
fairly complete at-a-glance idea of how well a certain design will per-
form in many situations.
THE PRACTICAL METHOD
A third way to compare mobility systems that may work well for a
designer working on a specific robot design, is to calculate the total vol-

Chapter 9 Comparing Locomotion Methods 237
ume of everything on the robot not related to the mobility system
(including the power supply), and define this volume with a realistic
ratio of length, width, and height. A good place to start for the size ratios
is to make the width 62 percent of the length, and the height one quarter
of the length. This box represents the volume of everything the mobility
system must carry.
The next step is to define the mobility requirements, allowing sub-
stantial leeway if the operating environment is not well known. The basic
six parameters discussed above are a good place to start.
• Step or wall height
• Minimum tunnel height
• Crevasse width
• Maximum terrain slope
• Minimum spacing of immovable objects
• Maximum soil density
All of these need to be studied carefully to aid in determining the most
effective mobility system layout to use. The more time spent doing this
study, the better the mobility system choice will match the terrain’s
requirements.
When this study is completed, selecting and designing the mobility
system is then a combination of scaling the system to the robot’s box
size, and meeting the mobility constraints. It should be remembered that
this process will include several iterations, trial and error, and persever-
ance to guarantee that the best system is being incorporated. The more
information that can be obtained about the operating environment, the
more likely the robot will be successful. In the end, one of the more
capable and versatile mobility systems, like the six-wheeled rocker bogie
or the four-tracked front-flipper layouts will probably work well enough
even without complete knowledge of the environment.
A generic rule of thumb for mobility system design can be extracted
from the investigations done in this chapter. Relative to the size and
weight of the vehicle the mobility system is carrying, make the mobility
system big, light, slow, low (or movable) cg, and be sure it has sufficient
treads. If all these are maximized, they will make your robot a high
mobility robot.

This page intentionally left blank.
Chapter 10 Manipulator Geometries
Copyright © 2003 by The McGraw-Hill Companies, Inc. Click here for Terms of Use.

This page intentionally left blank.
M
anipulator is a fancy name for a mechanical arm. A manipulator is
an assembly of segments and joints that can be conveniently
divided into three sections: the arm, consisting of one or more segments
and joints; the wrist, usually consisting of one to three segments and
joints; and a gripper or other means of attaching or grasping. Some texts
on the subject divide manipulators into only two sections, arm and grip-
per, but for clarity the wrist is separated out as its own section because it
performs a unique function.
Industrial robots are stationary manipulators whose base is perma-
nently attached to the floor, a table, or a stand. In most cases, however,
industrial manipulators are too big, use a geometry that is not effective
on a mobile robot, or lack enough sensors -(indeed many have no envi-
ronmental sensors at all) to be considered for use on a mobile robot.
There is a section covering them as a group because they demonstrate a
wide variety of sometimes complex manipulator geometries. The chap-
ter’s main focus, however, will be on the three general layouts of the arm
section of a generic manipulator, and wrist and gripper designs. A few
unusual manipulator designs are also included.
It should be pointed out that there are few truly autonomous manipu-
lators in use except in research labs. The task of positioning, orienting,
and doing something useful based solely on input from frequently inade-
quate sensors is extremely difficult. In most cases, the manipulator is
teleoperated. Nevertheless, it is theoretically possible to make a truly
autonomous manipulator and their numbers are expected to increase dra-
matically over the next several years.
POSITIONING, ORIENTING, HOW MANY
DEGREES OF FREEDOM?
In a general sense, the arm and wrist of a basic manipulator perform two
separate functions, positioning and orienting. There are layouts where
the wrist or arm are not distinguishable, but for simplicity, they are
treated as separate entities in this discussion. In the human arm, the
241

242 Chapter 10 Manipulator Geometries
shoulder and elbow do the gross positioning and the wrist does the ori-
enting. Each joint allows one degree of freedom of motion. The theoreti-
cal minimum number of degrees of freedom to reach to any location in
the work envelope and orient the gripper in any orientation is six; three
for location, and three for orientation. In other words, there must be at
least three bending or extending motions to get position, and three twist-
ing or rotating motions to get orientation.
Actually, the six or more joints of the manipulator can be in any order,
and the arm and wrist segments can be any length, but there are only a
few combinations of joint order and segment length that work effec-
tively. They almost always end up being divided into arm and wrist. The
three twisting motions that give orientation are commonly labeled pitch,
roll, and yaw, for tilting up/down, twisting, and bending left/right respec-
tively. Unfortunately, there is no easy labeling system for the arm itself
since there are many ways to achieve gross positioning using extended
segments and pivoted or twisted joints. A generally excepted generic
description method follows.
A good example of a manipulator is the human arm, consisting of a
shoulder, upper arm, elbow, and wrist. The shoulder allows the upper
arm to move up and down which is considered one DOF. It allows for-
ward and backward motion, which is the second DOF, but it also allows
rotation, which is the third DOF. The elbow joint gives the forth DOF.
The wrist pitches up and down, yaws left and right, and rolls, giving
three DOFs in one joint. The wrist joint is actually not a very well
designed joint. Theoretically the best wrist joint geometry is a ball joint,
but even in the biological world, there is only one example of a true full
motion ball joint (one that allows motion in two planes, and twists 360°)
because they are so difficult to power and control. The human hip joint is
a limited motion ball joint.
On a mobile robot, the chassis can often substitute for one or two of
the degrees of freedom, usually fore/aft and sometimes to yaw the arm
left/right, reducing the complexity of the manipulator significantly.
Some special purpose manipulators do not need the ability to orient the
gripper in all three axes, further reducing the DOF. At the other extreme,
there are arms in the conceptual stage that have more than fifteen DOF.
To be thorough, this chapter will include the geometries of all the
basic three DOF manipulator arms, in addition to the simpler two DOF
arms specifically for use on robots. Wrists are shown separately. It is left
to you to pick and match an effective combination of wrist and arm
geometries to solve your specific manipulation problem. First, let’s look
at an unusual manipulator and a simple mechanism—perhaps the sim-
plest mechanism for creating linear motion from rotary motion.
Chapter 10 Manipulator Geometries 243
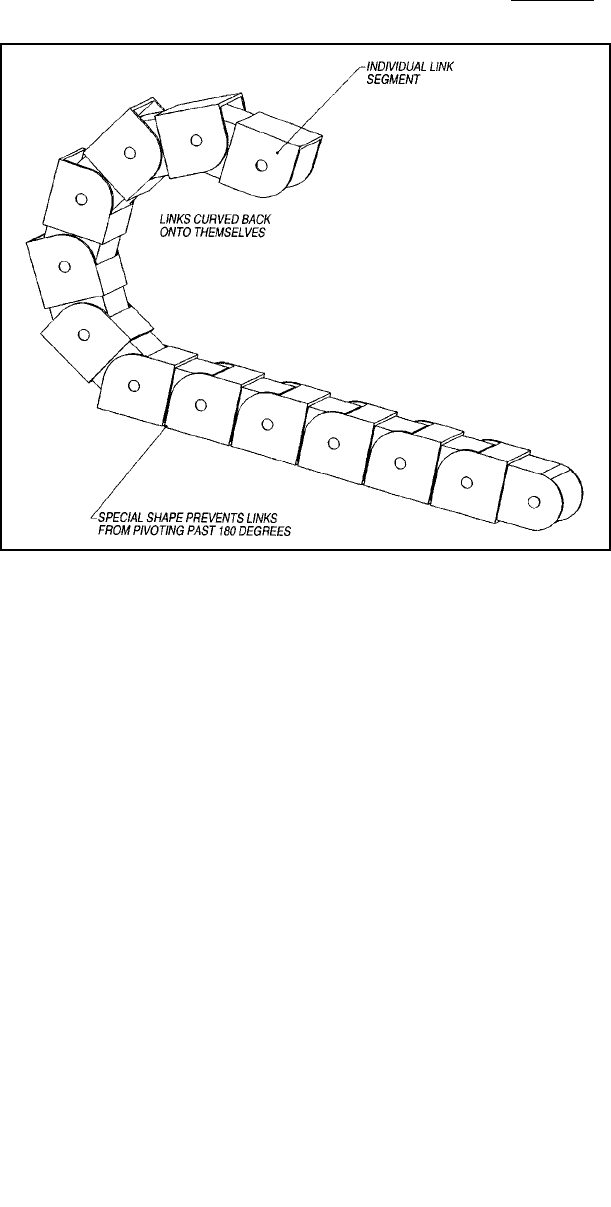
E-Chain
An unusual chain-like device can be used as a manipulator. It is based on
a flexible cable bundle carrier called E-Chain and has unique properties.
The chain can be bent in only one plane, and to only one side. This
allows it to cantilever out flat creating a long arm, but stored rolled up
like a tape measure. It can be used as a one-DOF extension arm to reach
into small confined spaces like pipes and tubes. Figure 10-1 shows a
simplified line drawing of E-chain’s allowable motion.
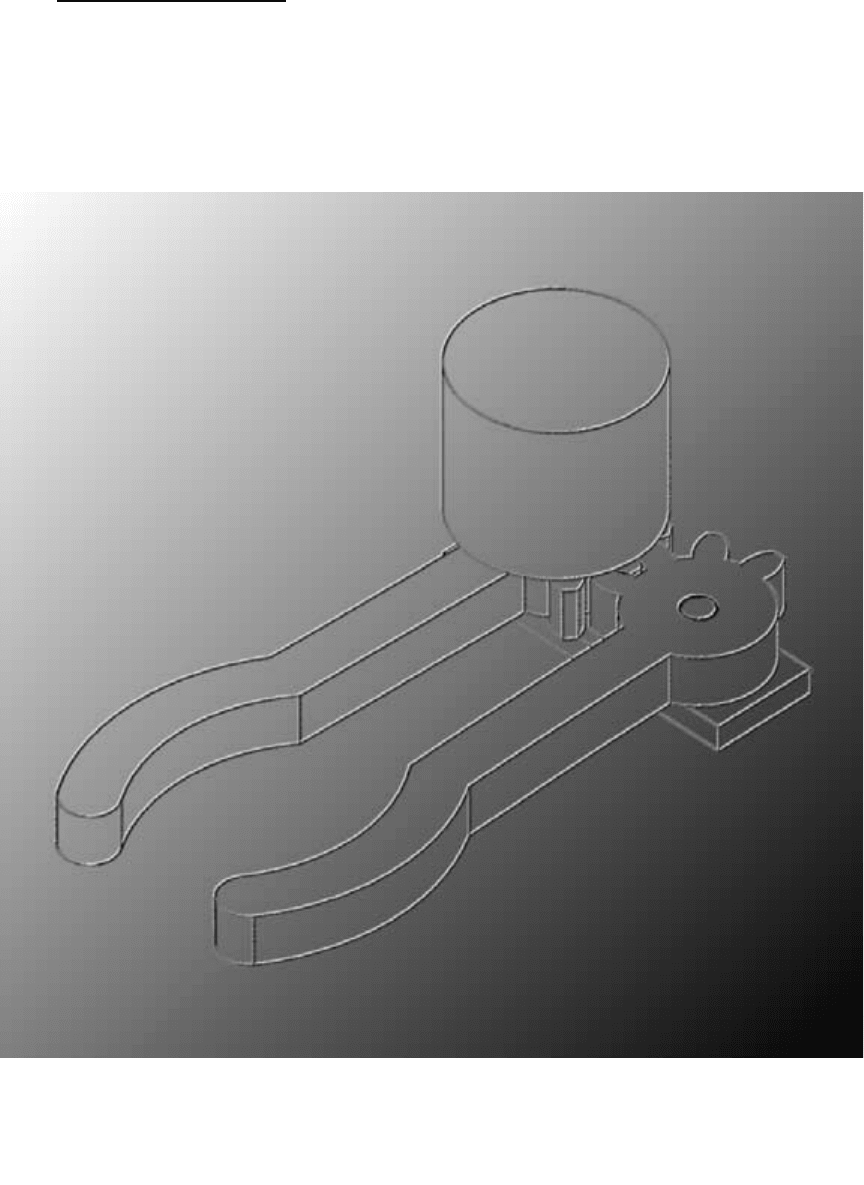
Slider Crank
The slider-crank (Figure 10-2) is usually used to get rotary motion from
linear motion, as in an internal combustion engine, but it is also an effi-
cient way to get linear motion from the rotary motion of a motor/gear-
box. A connecting rod length to / crank radius ratio of four to one pro-
duces nearly linear motion of the slider over most of its stroke and is,
therefore, the most useful ratio. Several other methods exist for creating
Figure 10-1 E-chain