Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.

204 Chapter 7 Walkers
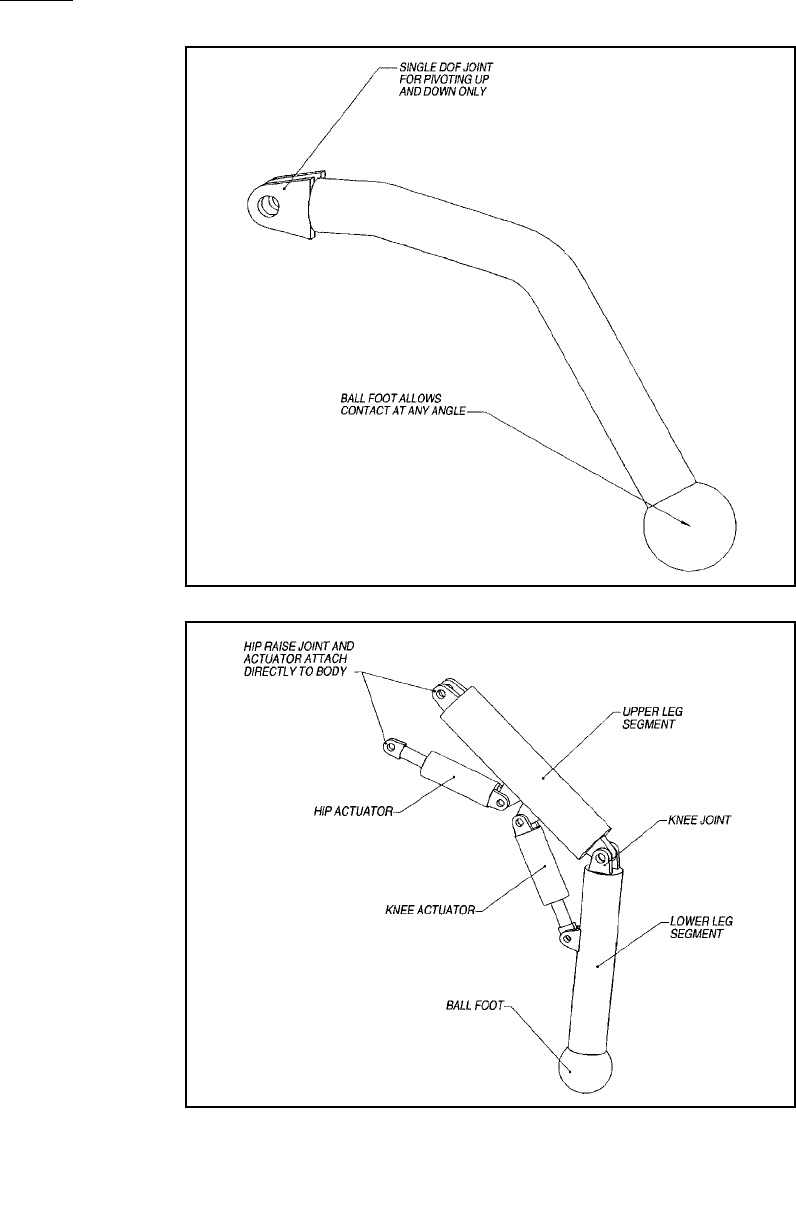
Figure 7-1 One-DOF leg for
frame walkers
Figure 7-2 Two-DOF leg using
linear actuators
Chapter 7 Walkers 205
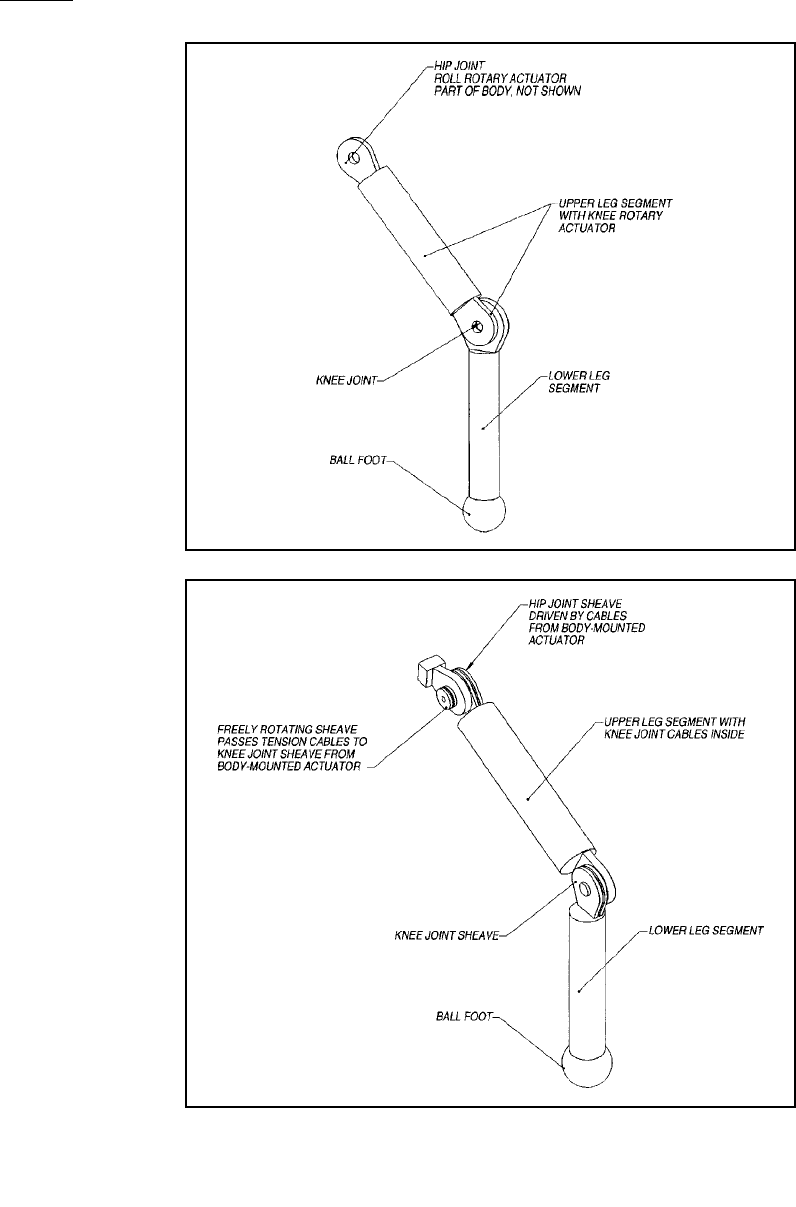
Rotary actuators (Figure 7-4) are the most elegant, but make the joints
large. The cable driven layout (Figure 7-5) takes up the least volume and
has no exposed actuators. Both of these methods are common, mostly
because they use motors in a simple configuration, rather than linear
actuators. Their biggest drawback is that they need to be big to get
enough power to be useful. iRobot’s Genghis robot used two hobby ser-
vos bolted together, acting as rotary actuators, to get a very effective two-
axis hip joint. This robot, and several others like it, use simple straight
legs. These simple walker layouts are useful preliminary tools for those
interested in studying six-legged walking robots.
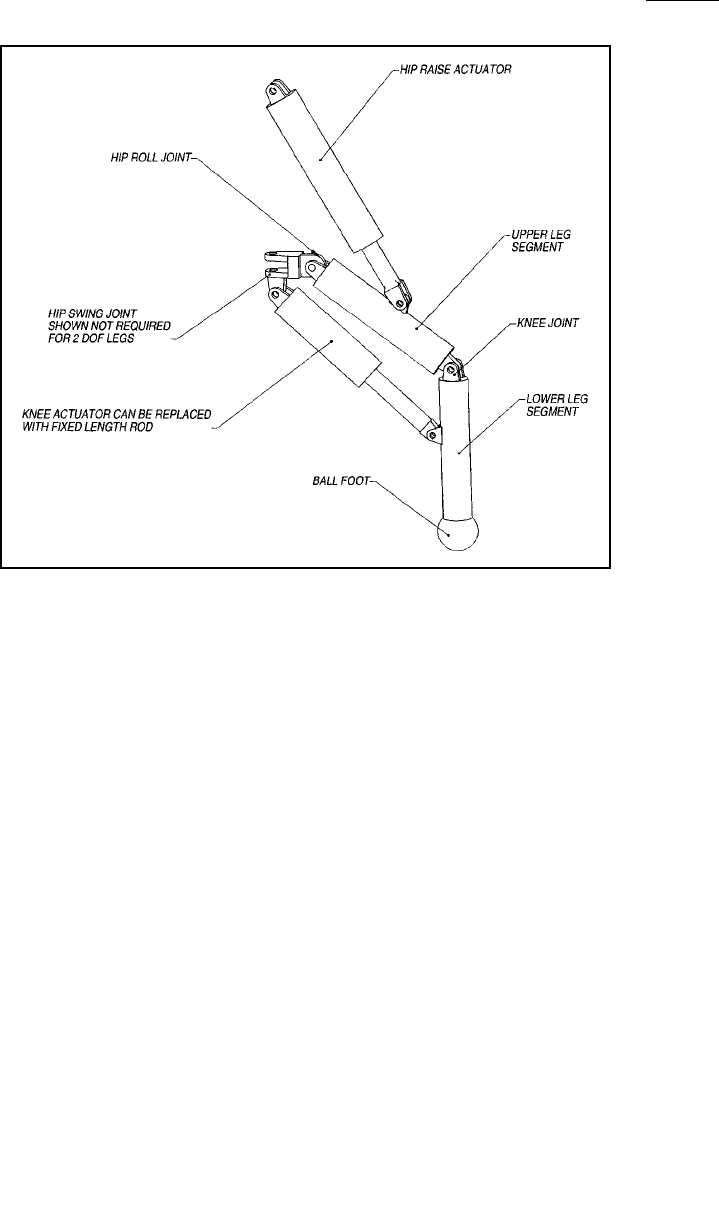
To turn the two-DOF linear actuator layout into a three-DOF, a uni-
versal joint can be added at the hip joint. This is controlled with an actu-
ator attached horizontally to the chassis. Figure 7-6 shows a simple
design for this universal hip joint. The order of the joints (swing first,
then raise; or raise first, then swing) makes a big difference in how the
foot location is controlled and should be carefully thought out and proto-
typed before building the real parts.
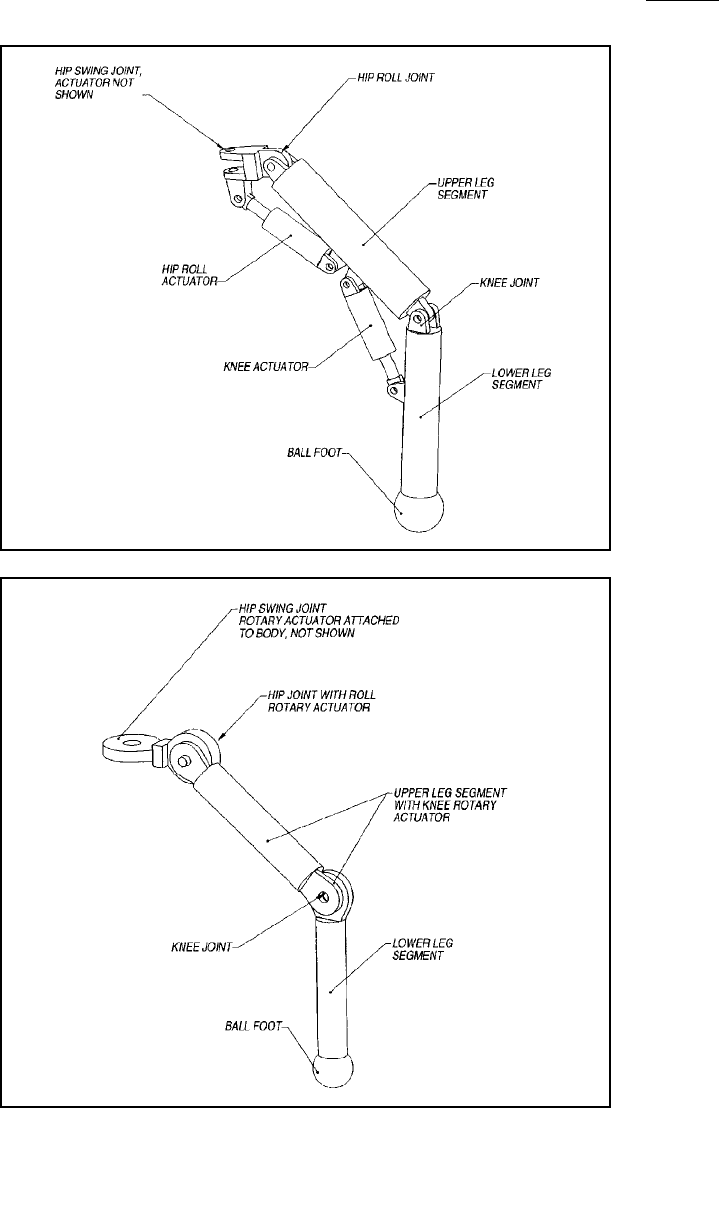
The three-DOF rotary actuator leg (Figure 7-7) adds a knee joint to
the Genghis layout for improved dexterity and mobility. There are many
varieties of this layout that change the various lengths of the segments
Figure 7-3 Two-DOF leg using
linear actuators with
chassis-mounted knee actuator
206 Chapter 7 Walkers
Figure 7-4 Two-DOF leg using
rotary actuators
Figure 7-5 Two-DOF leg using
cable driven actuators
Chapter 7 Walkers 207
Figure 7-6 Three-DOF leg using
linear actuators
Figure 7-7 Three-DOF leg using
rotary actuators
208 Chapter 7 Walkers
and the relative location of each actuator. It is quite difficult to drive a
two-DOF hip joint with cables, but it can be done. The general layout
would look much like what is shown in Figure 7-7.
WALKING TECHNIQUES
Statically-stable walkers are easier to implement than dynamically-sta-
ble walkers. A method used to group statically-stable walkers is the tech-
nique used to move the legs. There are three useful sub groups: wave
walking, independent leg walking, and frame walking. Wave walking is
what animals with many legs use, like millipedes. Independent leg walk-
ing is used by just about every four, six, and eight-leg walker, although
some simplify things by moving their legs in groups for certain speeds or
motions. Frame walking exists in nature in the form of an inchworm, and
is the simplest of the three, but to have high mobility still requires many
actuators. As we shall see, frame walking can be a very effective mobil-
ity method for a mobile robot.
Wave Walking
Centipedes and millipedes use a walking technique that must be men-
tioned, although it is simple in concept, for walking robots, it is less effi-
cient than other methods. The robot lifts its rear-most set of legs and
swings them forward and sets them down, then the next set of legs is
moved similarly. When the front-most set of legs is moved, the whole
robot chassis is moved forward relative to the legs. The process can be
smoothed out some by averaging the position of the body as each set of
legs moves forward. This technique can be used with six- or more-legged
robots, but is not very common in robots because of the large numbers of
joints and actuators.
Independent Leg Walking
Virtually all other legged animals in nature that don’t use wave walking
can control each leg independently. Some animals are better than others,
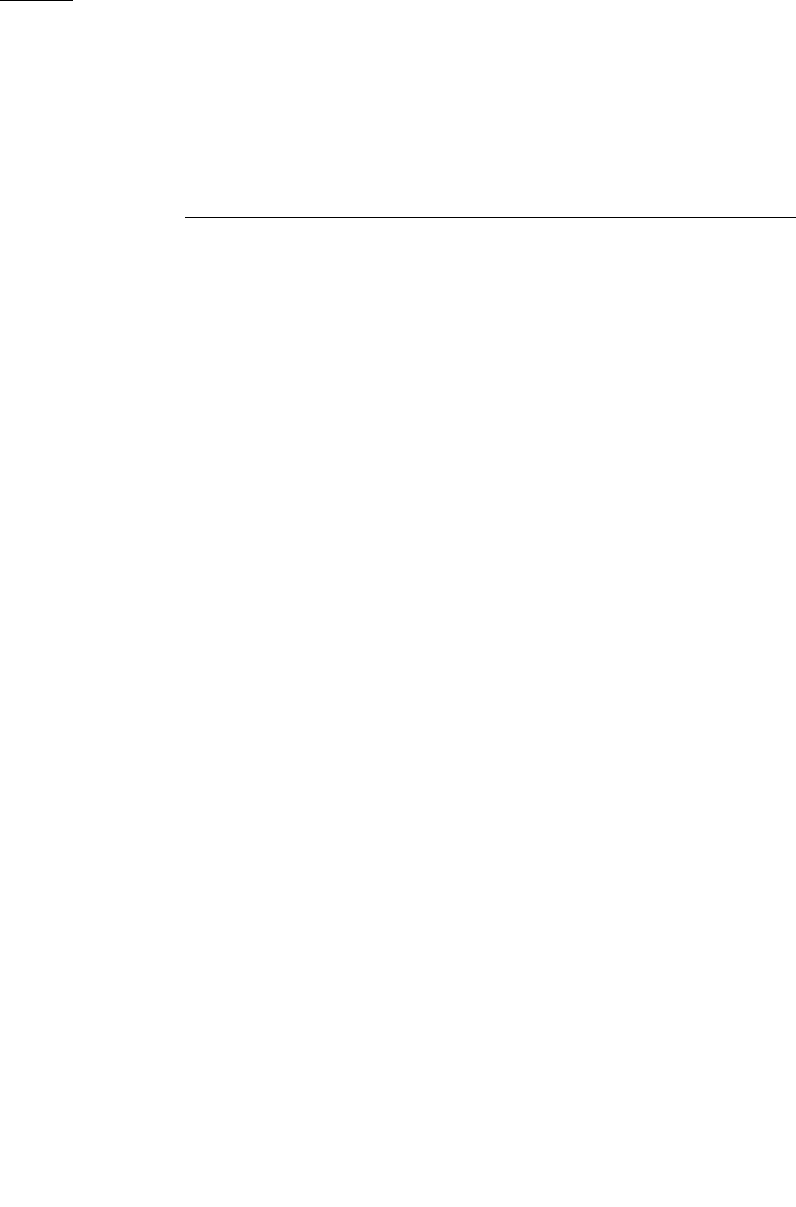
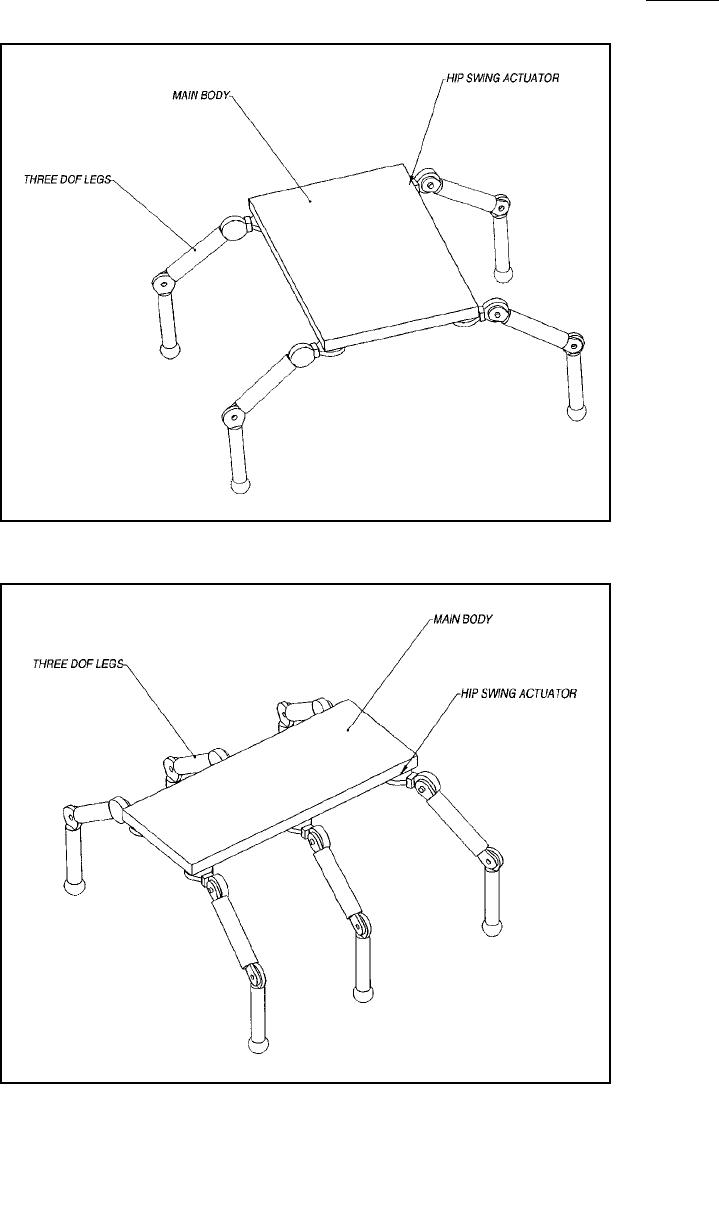
but the ability is there. Figures 7-8 and 7-9 show four- and six-legged
walkers with three rotary-actuated joints in each leg. An eight-leg layout
would have no less than 24 actuators. The four- and six-legged versions
Chapter 7 Walkers 209
Figure 7-8 Independent leg
walker, four legs, twelve DOF
Figure 7-9 Independent leg
walker, six legs, eighteen DOF
210 Chapter 7 Walkers
theoretically have very high mobility. Many research robots have been
built that use four or six legs and are impressively agile, if very slow.
Although it would seem impossible to build a two-legged statically-
stable robot, there is a trick that toys and some research robots use that
gives the robot the appearance of being dynamically stable when they are
actually statically stable. The trick is to have feet that are large enough to
hold the robot upright on one foot without requiring the foot to be in
exactly the right place. In effect, foot size reduces the required accuracy
of foot placement so that the foot can be placed anywhere it can reach
and the robot will not fall over.
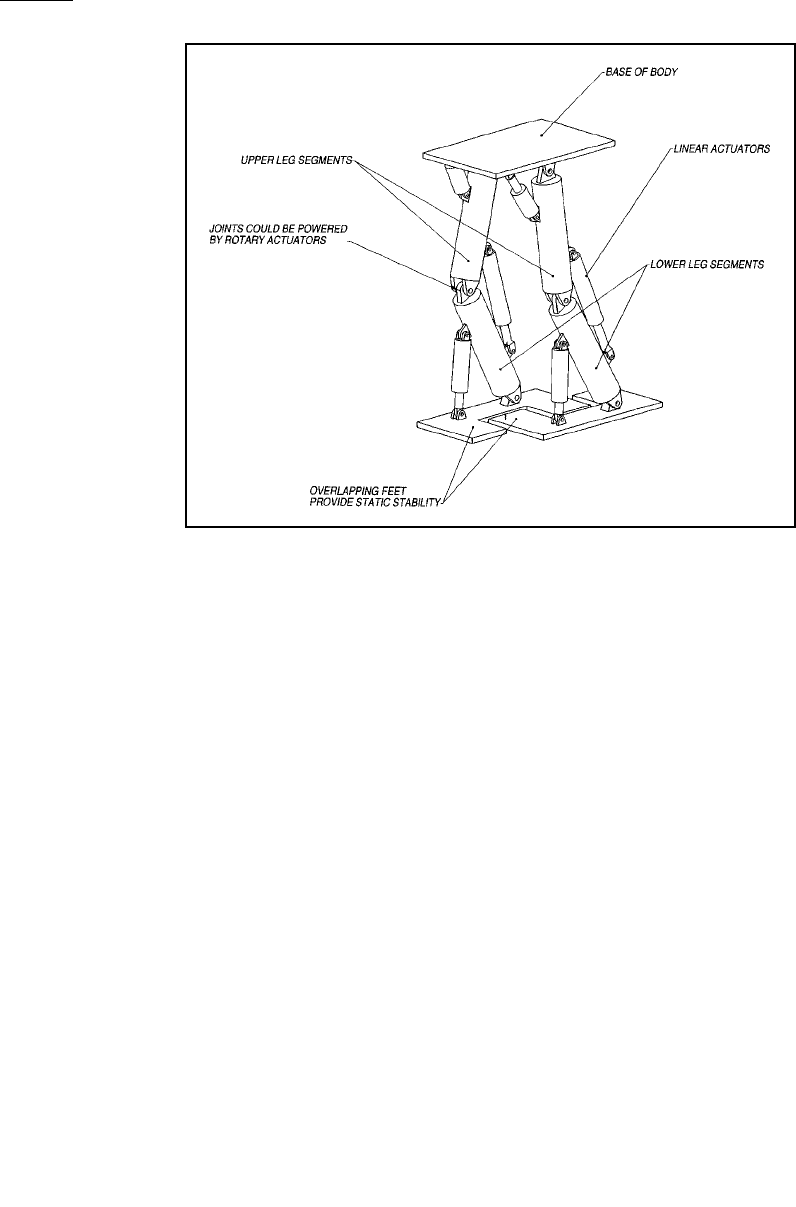
The wide feet must also prevent tipping over sideways and are so wide
that they overlap each other and must be carefully shaped and controlled
so they don’t step on each other. Two-legged walking, with oversized
and overlapping feet, is simply picking up the back foot, bringing it for-
ward, and putting it down. The hip joints require a second DOF in addi-
tion to swinging fore and aft, to allow rotation for turning. Each leg must
have at least three DOF, and usually requires four. The layout shown in
Figure 7-10 can only walk in a straight line because it lacks the hip rota-
tion joint. Notice that even with only two legs and no ability to turn, this
layout requires six actuators to control its six degrees of freedom.
This layout provides a good educational tool to learn about walking.
Although in the final implementation it may have eight DOF and its
Figure 7-10 Extra wide feet
provide two-legged stability
Chapter 7 Walkers 211
knees bend backwards, it is familiar to the designer. One leg at a time can
be built, tested, and debugged and then both attached to a simple plate
for a chassis.
Frame Walking
The third general technique for walking with a legged robot is frame
walking. Frame walking relies on the robot having two major sections,
each with their own set of legs, both sections statically stable. Walking is
accomplished by raising the legs of one frame, traversing that frame for-
ward relative to the frame whose legs are still on the ground, and then
setting the legs down. The other frame’s legs are then raised and tra-
versed forward.
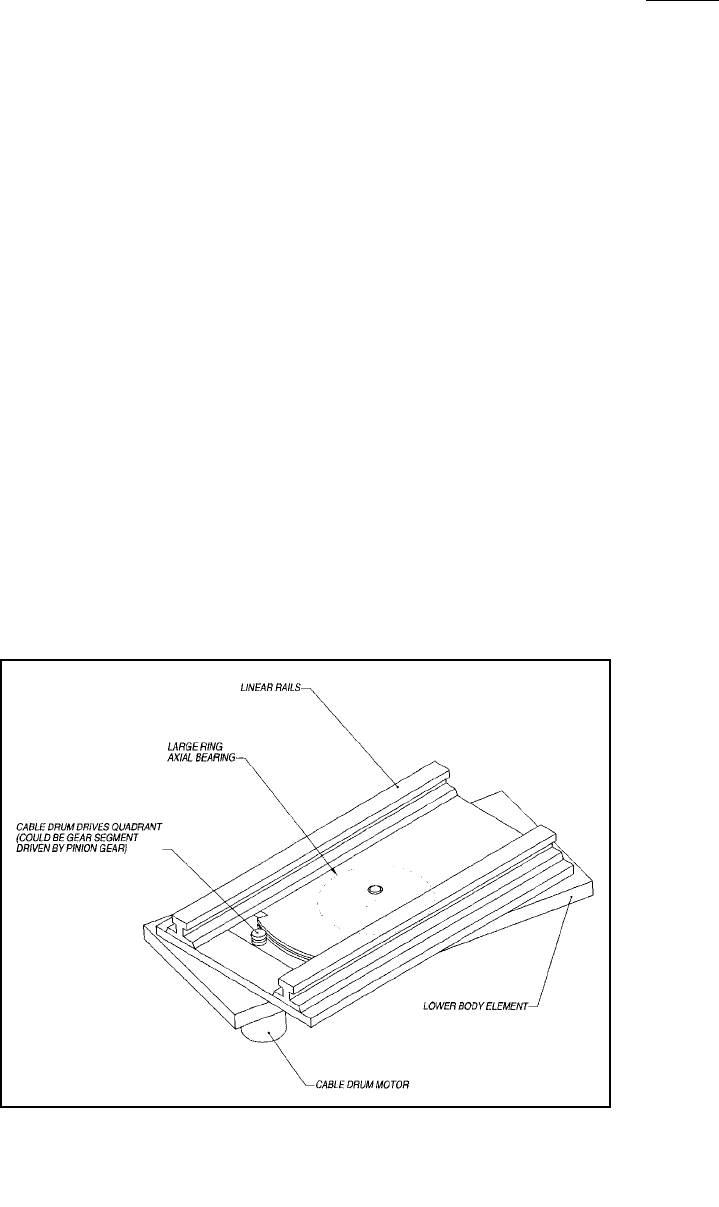
The coupling between the two frames usually has a second rotating
DOF to facilitate turning, rather than by adding a rotation in each leg.
Figure 7-11 shows a mechanism for traversing and turning the two parts
of the body. In nature, an inchworm uses a form of frame walking. The
two frames are the front and back sections of the worm. The coupling is
the leg-less section in between. In the case of the inchworm, the coupling
has many degrees of freedom, but two is all that is required if the legs
each have their own ability to move up and down. Unfortunately for
robot designers, the inchworm also has the ability to grasp with its claw-
Figure 7-11 Mechanism for
frame traversing and rotating
212 Chapter 7 Walkers
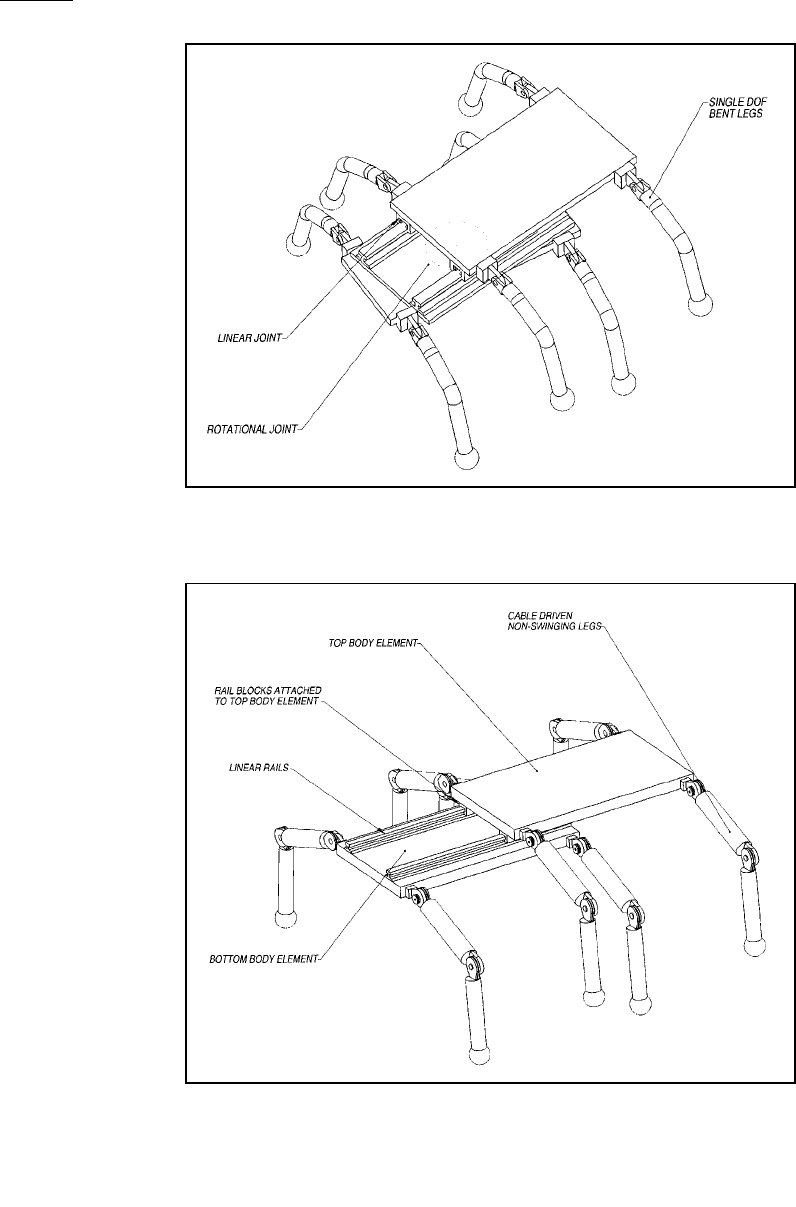
Figure 7-12 Traversing/rotating
frame eight-leg frame walker with
single-DOF legs
Figure 7-13 Eight-leg frame
walker with two-DOF legs
Chapter 7 Walkers 213
like feet, making it quasi-statically stable. Figure 7-12 shows an imple-
mentation of the traversing/rotating frame with simple one-DOF legs.
This layout has 10 DOF. Figure 7-13 removes the rotating joint, which
forces placing a second joint in each leg to be able to turn. The actuator
count goes up to 17 with this layout. The advantage of having the second
joint in each leg is the ability to place each leg in the most optimum point
to maintain traction and stability. Still, 17 actuators is a lot to control and
maintain.
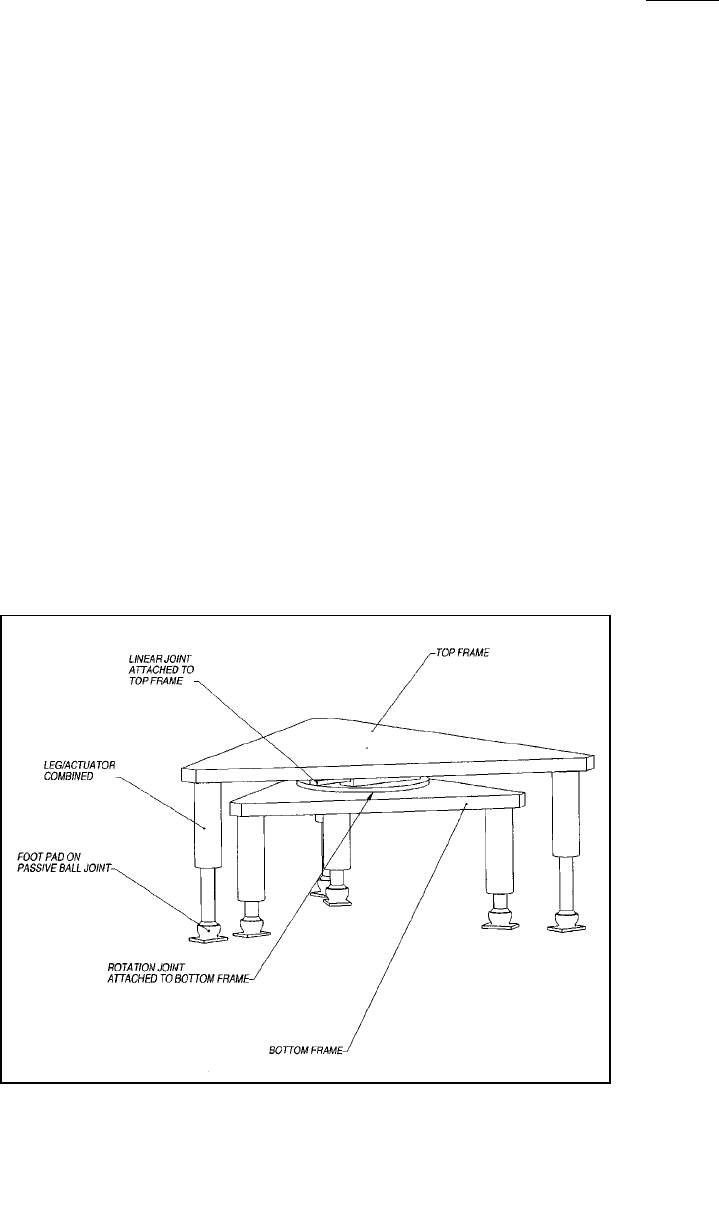
A six-leg tripod-gait frame walker could, however, have just three
degrees of freedom, all in one joint between the two frames. This joint
would have a linear motion for traversing, a rotary motion for steering,
and a vertical motion to lift one frame and then the other. Mobility would
suffer with such a simple platform because the robot would lack the abil-
ity to stand level on uneven terrain. Perhaps the best is a six-leg tripod-
gait frame walker with one linear DOF in each leg and two in the cou-
pling, bringing the total DOF to eight. Figure 7-14 shows just such a
layout, perhaps the best walking layout to start with if designing a walk-
ing robot.
Figure 7-14 Six-legged
tripod-frame walker with
single-DOF legs