Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.

194 Chapter 6 Steering History
vehicles use this method to steer, while older tracked vehicles would
brake a track on one side, slowing down only that track, which turned
the vehicle.
As discussed in the chapter on wheeled vehicles, this is also the steer-
ing method used on some four-wheel loaders like the well-known
Bobcat. One motor drives the two wheels on one side of the vehicle, the
other drives the two wheels on the other side. This steering method is so
effective and robust that it is used on a large percentage of four-, six-, and
even eight-wheeled robots, and nearly all modern tracked vehicles
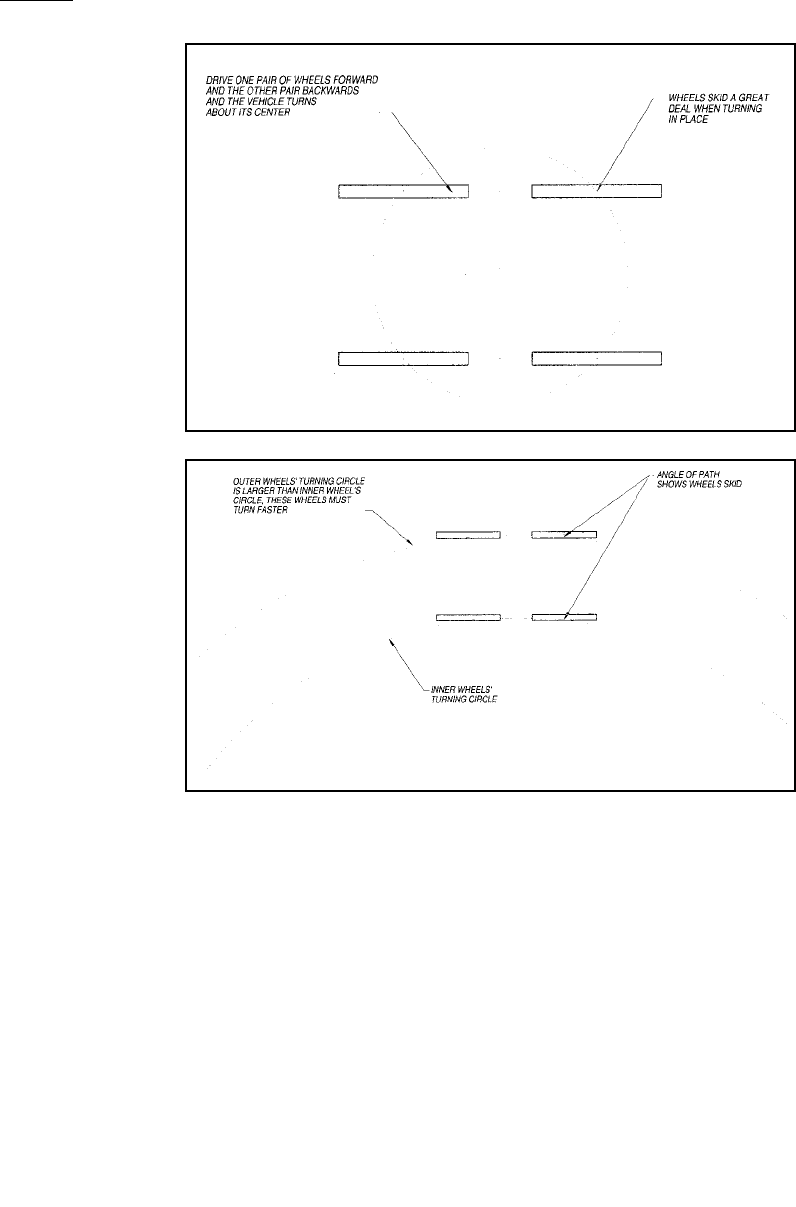
whether autonomous or not. This steering method produces a lot of skid-
Figure 6-5a Differential
steering
Figure 6-5b
Chapter 6 Steering History 195
ding of the wheels or tracks. This is where the name “skid steer” comes
from.
The fact that the wheels or tracks skid means this system is wasting
energy wearing off the tires or track pads, and this makes skid steering an
inefficient design. Placing the wheels close together or making the tracks
shorter reduces this skidding at the cost of fore/aft stability. Six-wheeled
skid-steering vehicles can place the center set of wheels slightly below
the front and back set, reducing skidding at the cost of adding wobbling.
Several all-terrain vehicle manufacturers have made six-wheeled vehi-
cles with this very slight offset, and the concept can be applied to indoor
hard-surface robots also. Eight-wheeled robots can benefit from lower-
ing the center two sets of wheels, reducing wobbling somewhat.
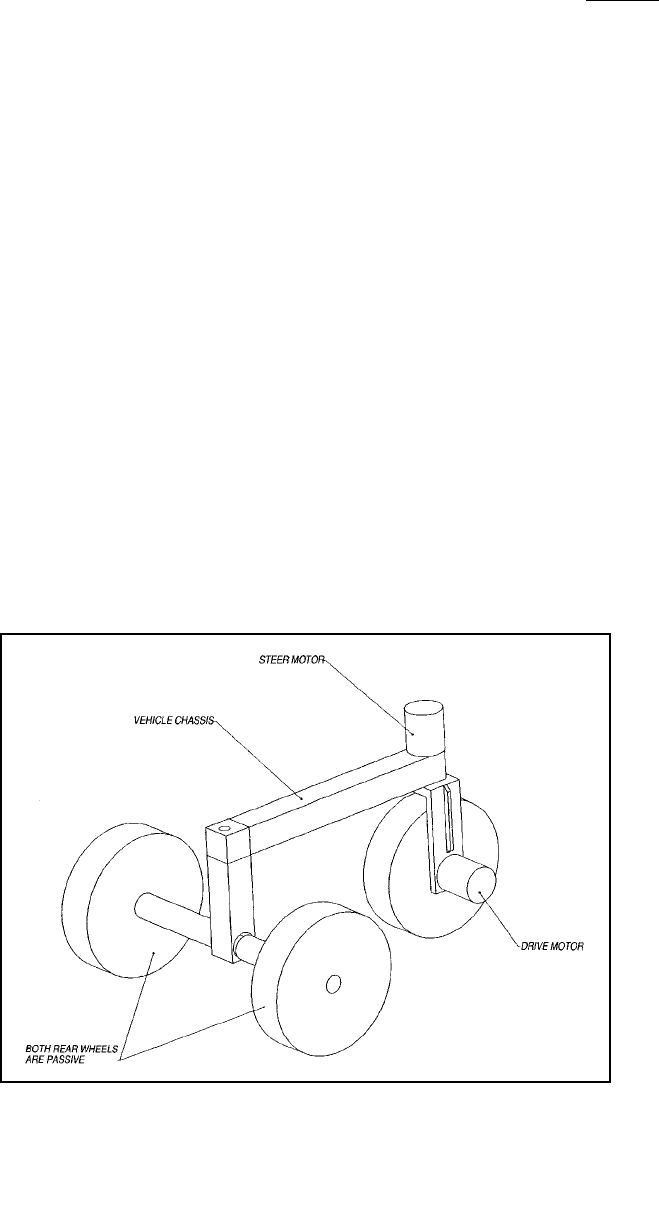
The single wheel drive/steer module discussed earlier and shown on a
tricycle in Figure 6-6 can be applied to many layouts, and is, in general,
an effective mechanism. One drawback is some inherent complexity
with powering the wheel through the turning mechanism. This is usually
accomplished by putting the drive motor, with a gearbox, inside the
wheel. Using this layout, the power to the drive motor is only a couple
wires and signal lines from whatever sensors are in the drive wheel.
These wires must go through the steering mechanism, which is easier
than passing power mechanically through this joint. In some motor-in-
wheel layouts, particularly the syncro-drive discussed next, the steering
Figure 6-6 Drive/steer module
on tricycle
196 Chapter 6 Steering History
mechanism must be able to rotate the drive wheel in either direction as
much as is needed. This requires an electrical slip ring in the steering
joint. Slip rings, also called rotary joints, are manufactured in both stan-
dard sizes or custom layouts.
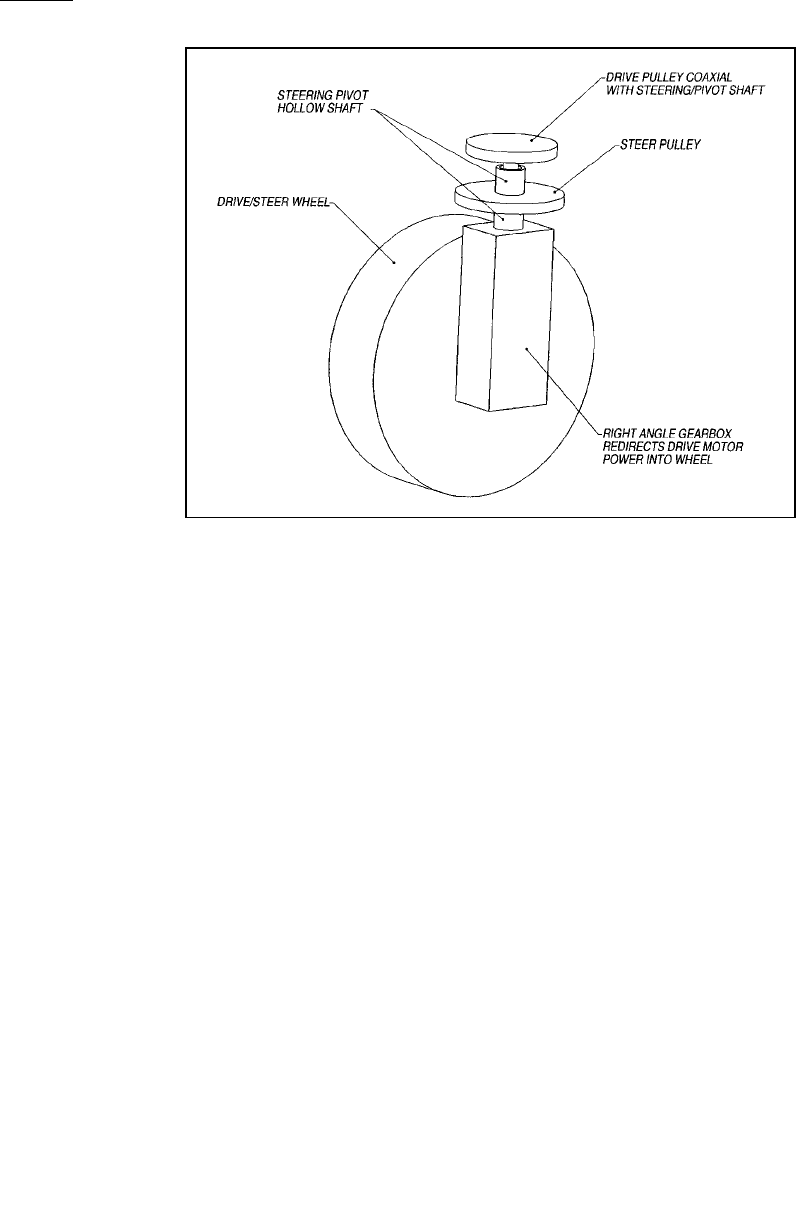
One type of mechanical solution to the problem of powering the
wheel in a drive/steer module has been done with great success on sev-
eral sophisticated research robots and is commonly called a syncro-
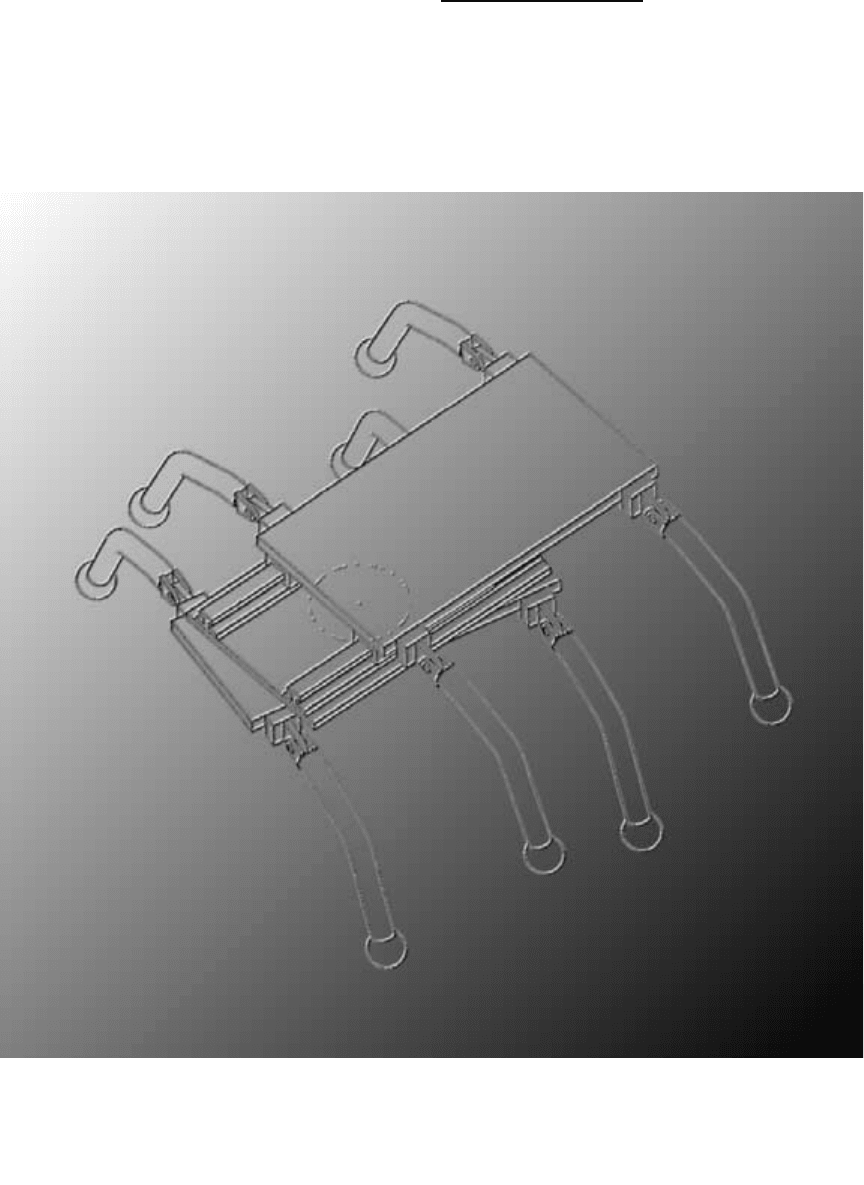
drive. A syncro-drive (Figure 6-7) normally uses three or four wheels.
All are driven and steered in unison, synchronously. This allows fully
holonomic steering (the ability to head in any direction without first
requiring moving forward). As can be seen in the sketch, the drive
motor is directly above the wheel. An axle goes down through the cen-
ter of the steering shaft and is coupled to the wheel through a right angle
gearbox.
This layout is probably the best to use if relying heavily on dead reck-
oning because it produces little rotational error. Although the dominant
dead-reckoning error is usually produced by things in the environment,
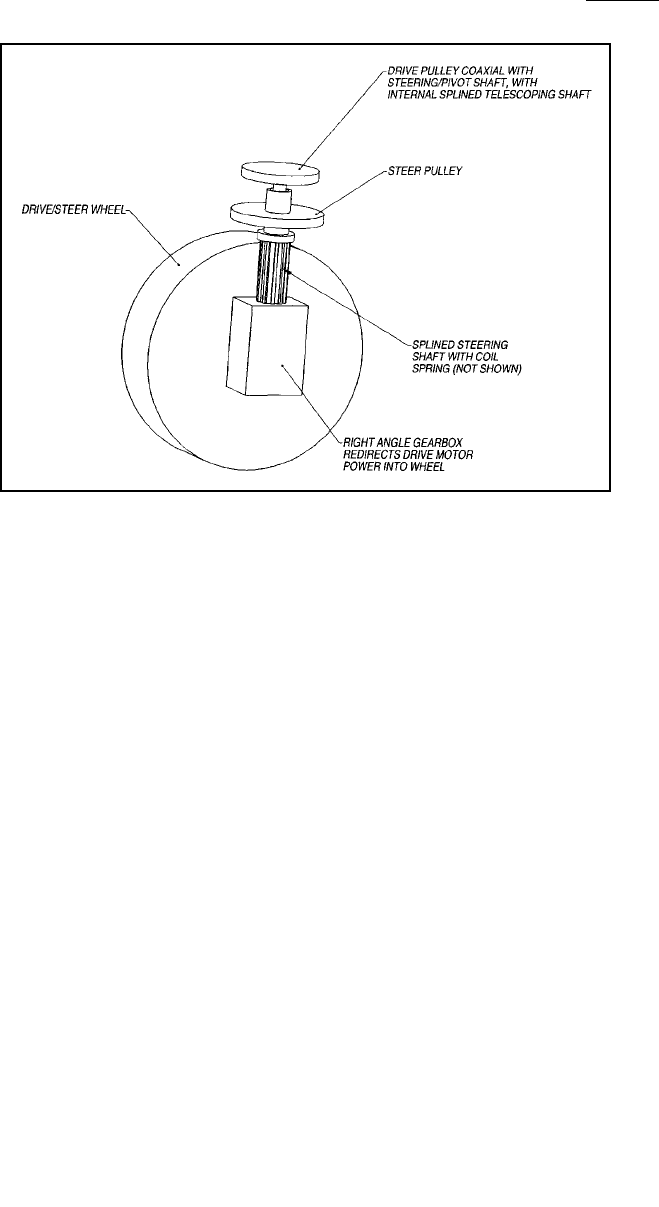
this system theoretically has the least internal error. The four-wheeled
layout is not well suited for anything but flat terrain unless at least one
wheel module is made vertically compliant. This is possible, but would
produce the complicated mechanism shown in Figure 6-8.
Figure 6-7 Synchronous drive
Chapter 6 Steering History 197
All-terrain cycles (ATCs), when they were legal, ran power through a
differential to the two rear wheels, and steered with the front wheel in a
standard tricycle layout. ATCs clearly pointed out the big weakness of
this layout, the tendency to fall diagonally to one side of the front wheel
in a tight turn. Mobility was moderately good with a human driver, but
was not inherently so.
Quads are the answer to the stability problems of ATCs. Four wheels
make them much more stable, and many are produced with four wheel
drive, enhancing their mobility greatly although they cannot turn in
place. They are, of course, designed to be controlled by humans, who
can foresee obstacles and figure out how to maneuver around them. If a
mobility system in their size range is needed, they may be a good place
to start. They are mass-produced, their price is low, and they are a
mature product. Quads are manufactured by a number of companies
and are available in many size ranges offering many different mobility
capabilities.
As the number of wheels goes up, so does the variety of steering
methods. Most are based on variations of the types already mentioned,
but one is quite different. In Figure 4-30 (Chapter Four), the vehicle is
divided into 2 sections connected by a vertical axis joint. This layout is
common on large industrial front-end loaders and provides very good
steering ability even though it cannot turn in place. The layout also
Figure 6-8 Drive/steer module
with vertical compliance
198 Chapter 6 Steering History
forces the sections to be rather unusually shaped to allow for tighter turn-
ing. Power is transferred to the wheels from a single motor and differen-
tials in the industrial version, but mobility would be increased if each
wheel had its own motor.
Chapter 7 Walkers
Copyright © 2003 by The McGraw-Hill Companies, Inc. Click here for Terms of Use.

This page intentionally left blank.

T
here are no multi-cell animals that use any form of continuously
rolling mechanism for propulsion. Every single land animal uses
jointed limbs or squirms for locomotion. Walking must be the best way
to move then, right? Why aren’t there more walking robots? It turns out
that making a walking robot is far more difficult than making a wheeled
or tracked one. Even the most basic walker requires more actuators,
more degrees of freedom, and more moving parts.
Stability is a major concern in walking robots, because they tend to be
tall and top heavy. Some types of leg geometries and walking gaits pre-
vent the robot from falling over no matter where in the gait the robot
stops. They are statically stable. Other geometries are called “dynami-
cally stable.” They fall over if they stop at the wrong point in a step.
People are dynamically stable.
An example of a dynamically-stable walker in nature is, in fact, any
two-legged animal. They must get their feet in the right place when they
want to stop walking to prevent tipping over. Two-legged dinosaurs,
humans, and birds are remarkably capable two legged walkers, but any
child that has played Red-light/Green-light or Freeze Tag has figured out
that it is quite difficult to stop mid-stride without falling over. For this
reason, two legged walking robots, whether anthropomorphic (human-
like) or birdlike (the knee bends the other way), are rather complicated
devices requiring sensors that can detect if the robot is tipping over, and
then calculate where to put a foot to stop it from falling.
Some animals with more than two legs are also dynamically stable
during certain gait types. Horses are a good example. The only time
they are statically stable is when they are standing absolutely still. All
gaits they use for locomotion are dynamically stable. When they want to
stop, they must plan where to put each foot to prevent falling over.
When a horse’s shoe needs to be lifted off the ground, it is a great effort
for the horse to reposition itself to remain stable on three hooves, even
though it is already standing still. Cats, on the other hand, can walk with
a gait that allows them to stop at any point without tipping over. They do
not need to plan in advance of stopping. This is called statically-stable
independent leg walking. Elephants are known to use this technique
201
202 Chapter 7 Walkers
when crossing streams or difficult terrain. They stand on three legs
while the forth leg is moved around until it finds, by feel, a suitable
place to set down.
These examples demonstrate that four-legged walkers can have
geometries that are either dynamically or statically stable or both.
Animals have highly developed sensors, a highly evolved brain, and fan-
tastically high power-density muscles, that allow this variety of motion
control. Practical walking robots, because of the limitations of sensors,
processors, and fast acting powerful actuators, usually end up being stat-
ically stable with two to eight legs.
The design of dynamically-stable, walking mobile robots requires an
extensive knowledge of fairly complicated sensors, balance, high-level
math, fast-acting actuators, kinematics, and dynamics. This is all beyond
the scope of this book. The rest of this chapter will focus on the second
major category, statically-stable walkers.
LEG ACTUATORS
First, let’s look and leg geometries and actuation methods. There are
three major techniques for moving legs on a mobile robot.
• Linear actuators (hydraulic, pneumatic, or electric)
• Direct-drive rotary
• Cable driven
Hydraulics is not covered in this book, but linear motion can be done
effectively using two other methods, pneumatic and electric. Pneumatic
cylinders come in practically any imaginable size and have been used in
many walking robot research projects. They have higher power density
than electric linear actuators, but the problem with pneumatics is that the
compressed air tank takes up a large volume.
Linear actuators have the advantage that they can be used directly as
the leg itself. The body of the actuator is mounted to the robot’s chassis
or another actuator, and the end of the extending segment has a foot
attached to it. This concept has been used to make robots that use
Cartesian and cylindrical coordinate walkers. These layouts are not cov-
ered in this book, but the reader is urged to investigate them since they
can simplify the development of the control code of the robot.

Chapter 7 Walkers 203
Direct-drive rotary actuators usually have to be custom designed to
get torque outputs high enough to rotate the walker’s joints. They have
low power density and usually make the walker’s joints look unnaturally
large. They are very easy to control accurately and facilitate a modular
design since the actuator can be thought of conceptually and physically
as the complete joint. This is not true of either linear actuated or cable
driven joints.
Cable-driven joints have the advantage that the actuators can be
located in the body of the robot. This makes the limbs lighter and
smaller. In applications where the leg is very long or thin, this is critical.
They are somewhat easy to implement, but can be tricky to properly ten-
sion to get good results. Cable management is a big job and can consume
many hours of debug time.
LEG GEOMETRIES
Walking robots use legs with from one to four degrees of freedom
(DOF). There are so many varieties of layouts only the basic designs are
discussed. It is hoped the designer will use these as a starting point from
which to design the geometry and actuation method that best suits the
application.
The simplest leg has a single joint at the hip that allows it to swing up
and down (Figure 7-1). This leg is used on frame walkers and can be
actuated easily by either a linear or rotary actuator. Since the joint is
already near the body, using a cable drive is unnecessary. Notice that all
the legs shown in the following figures have ball shaped feet. This is nec-
essary because the orientation of the foot is not controlled and the ball
gives the same contact surface no matter what orientation it is in. A sec-
ond method to surmount adding orientation controlled feet is to mount
the foot on the end of the leg with a passive ball joint.
The following four figures show two-DOF legs with the different
actuation methods. These figures demonstrate the different attributes of
the actuation method. Figure 7-2 shows that linear actuators make the
legs much wider in one dimension but are the strongest of the three.
Figure 7-3 shows a mechanism that keeps the second leg segment verti-
cal as it is raised and lowered. The actuator can be replaced with a pas-
sive link, making this a one-DOF leg whose second segment doesn’t
swing out as much as the leg shown in Figure 7-2.