Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.


184 Chapter 5 Tracked Vehicle Suspensions and Drivetrains
very capable layout results. The main chassis is geared to the shared axle
so it is always at the half-angle between the front and rear tracks, which
allows it to be raised up yet still be level when folding both tracks down.
This trick raises the entire chassis, but it also offloads the weight of the
robot from the track guide blades, increasing rolling efficiency when
high traction is not needed. This reconfigurable layout combines the high
mobility of tracks with good smooth-road rolling efficiency.
There are two basic layouts for four-tracked vehicles. They are both
train-like in that there are two two-tracked modules connected by some
sort of joint. The two modules must be able to move in several directions
relative to each other. They can pitch up and down, yaw left and right,
and, ideally, roll (twist).
The simplest connection that allows all three degrees of freedom is the
ball joint. If the joint is passive, steering is accomplished in the same
way as a two-tracked vehicle, except that now both modules must turn at
just the right time to keep skidding between the modules to a minimum.
This turns out to be tricky. The ball joint also limits the range of steering
angle simply because the socket must wrap around the ball enough to
adequately capture it. A universal joint has a greater range of motion, and
is easier to use if the joint is to be powered.
The articulated joint, an active universal joint, overcomes the steering
problem by allowing the tracks to rotate at whatever speed limits skid-
ding. This steering method makes this layout very agile. The Hagglund
Bv206, which uses this layout, is considered nearly unstoppable in
almost any terrain from soft snow to steep hills. It is even amphibious,
propelled through the water by the tracks. Because it cannot be skid
steered, it can’t turn in place. Nevertheless, it is a very capable layout.
Steering the Hagglund Bv206 is done with a standard steering wheel,
which turns the articulated joint and forces the two modules to bend. The
tracks are driven through limited slip differentials, allowing the inner and
outer tracks in each module to travel at different speeds just like in an
Ackerman steered wheeled vehicle.
Six-Tracked Drivetrains
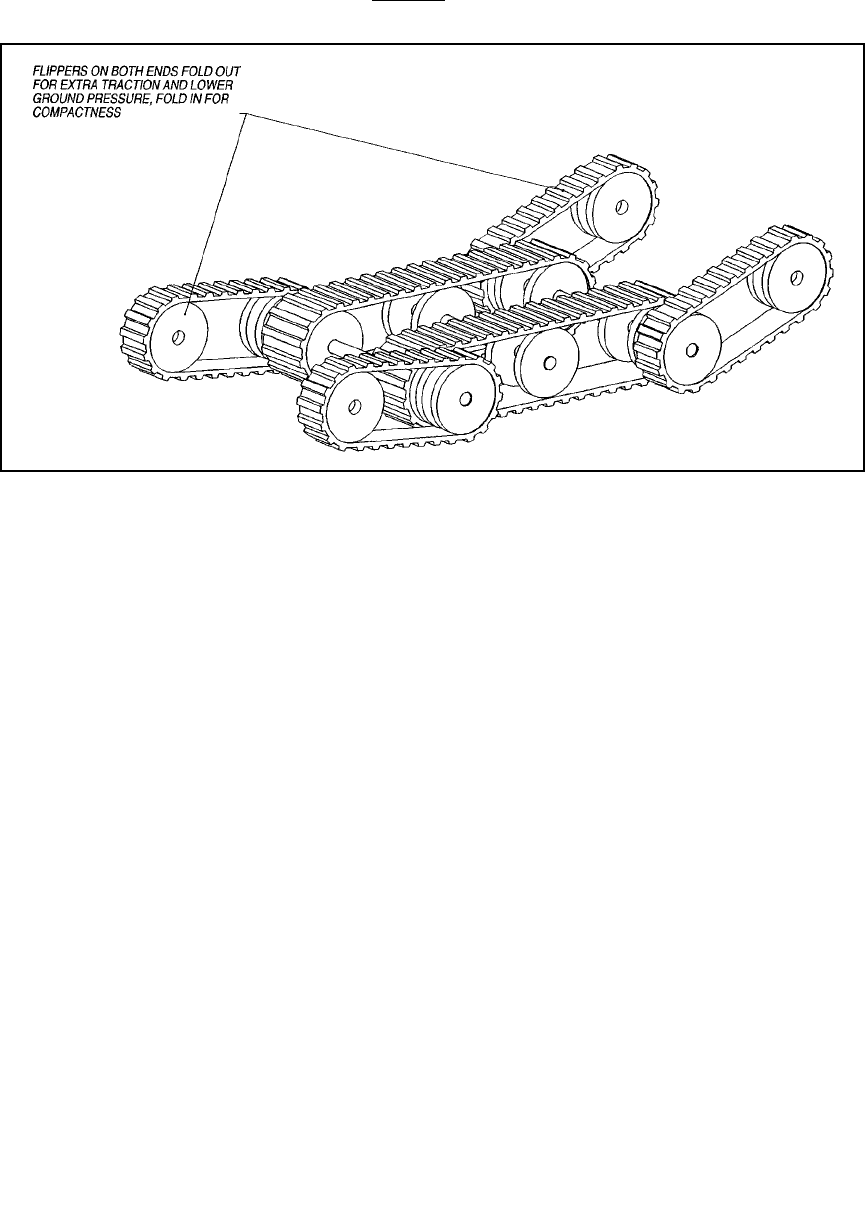
There is at least one track layout (Figure 5-18) incorporated on an exist-
ing telerobotic vehicle that uses six tracks. It is an extension of the
Urbie design, but was actually invented before Urbie’s layout. The two-
tracked layout is augmented by flipper tracks on both the front and
back, independently tilted, but whose tracks are driven by the main
track motors. This layout allows the vehicle to stand up like the one
Chapter 5 Tracked Vehicle Suspensions and Drivetrains 185
shown in Figure 5-17. The double flippers extend the length of the two-
tracked base unit by almost a factor of two, facilitating crossing wide
crevasses and climbing stairs, yet still being able to turn in place in a
small aisle.
Figure 5-18 Six-tracked, double flippers
This page intentionally left blank.
Chapter 6 Steering History
Copyright © 2003 by The McGraw-Hill Companies, Inc. Click here for Terms of Use.

This page intentionally left blank.
T
he Romans extensively used two wheeled carts, pulled by horses.
Pull on the right rein and the horse pulls the cart to the right, and vise
versa. The two wheels on the cart were mounted on the same axle, but
were attached in a way that each wheel could rotate at whatever speed
was needed depending on whether the cart was going straight or around
a corner. Carts got bigger and eventually had four wheels, two in front
and two in back. It became apparent (though it is unclear if it was the
Romans who figured this out) that this caused problems when trying to
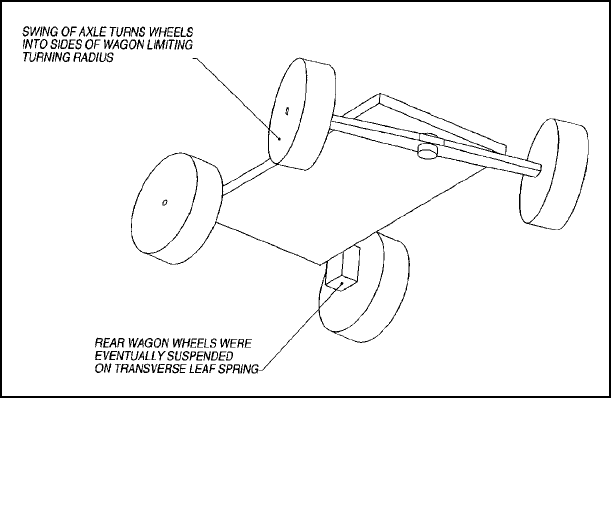
turn. One or the other set of wheels would skid. The simplest method for
fixing this problem was to mount the front set of wheels on each end of
an axle that could swivel in the middle (Figure 6-1). A tongue was
attached to the axle and stuck out from the front of the vehicle, which in
turn was attached to a horse. Pulling on the tongue aligned the front
wheels with the turn. The back wheels followed. This method worked
well and, indeed, still does for four wheeled horse drawn buggies and
carriages.
189
Figure 6-1 Pivot mounted front
wheels
190 Chapter 6 Steering History
In the early 1800s, with the advent of steam engines (and, later, elec-
tric motors, gas engines, and diesel engines) this steering method began
to show its problems. Vehicles were hard to control at speeds much faster
than a few meters per second. The axle and tongue took up a lot of room
swinging back and forth under the front of the vehicle. An attempt
around this problem was to make the axle long enough so that the front
wheels didn’t hit the cart’s sides when turning, but it was not very con-
venient having the front wheels wider than the rest of the vehicle.
The first effective fix was to mount the two front wheels on a mecha-
nism that allowed each wheel to swivel closer to its own center. This
saved space and was easier to control and it appeared to work well. In
1816, George Lankensperger realized that when turning a corner with
the wheels mounted using that geometry the inside wheel swept a differ-
ent curve than the outside one, and that there needed to be some other
mechanical linkage that would allow this variation in alignment. He
teamed with Rudolph Ackerman, whose name is now synonymous with
this type of steering geometry. Although Ackerman steering is used on
almost every human controlled vehicle designed for use on roads, it is
actually not well suited for high mobility vehicles controlled by comput-
ers, but it feels right to a human and works very well at higher speeds. It
turns out there are many other methods for turning corners, some intu-
itive, some very complex and unintuitive.
STEERING BASICS
When a vehicle is going straight the wheels or tracks all point in the
same direction and rotate at the same speed, but only if they are all the
same diameter. Turning requires some change in this system. A two-
wheeled bicycle (Figure 6-2) shows the most intuitive mechanism for
performing this change. Turn the front wheel to a new heading and it
rolls in that direction. The back wheel simply follows. Straighten out the
front wheel, and the bicycle goes straight again.
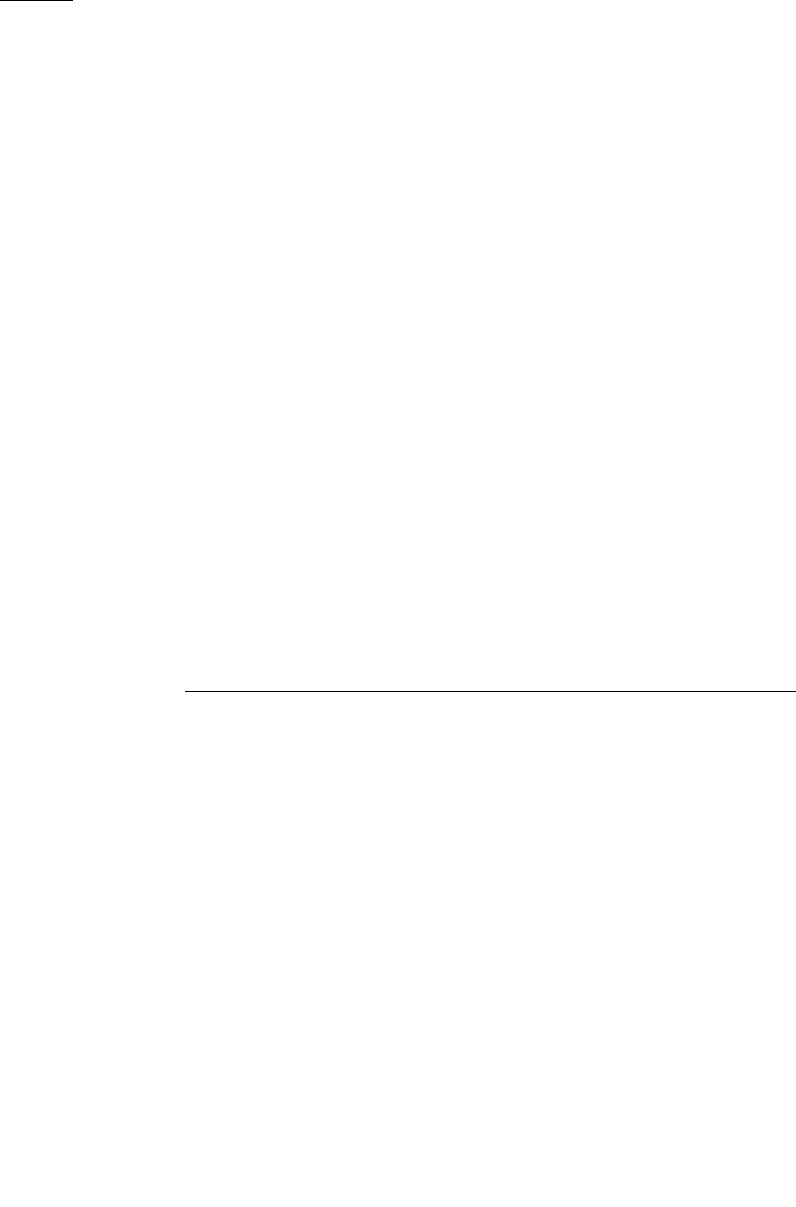
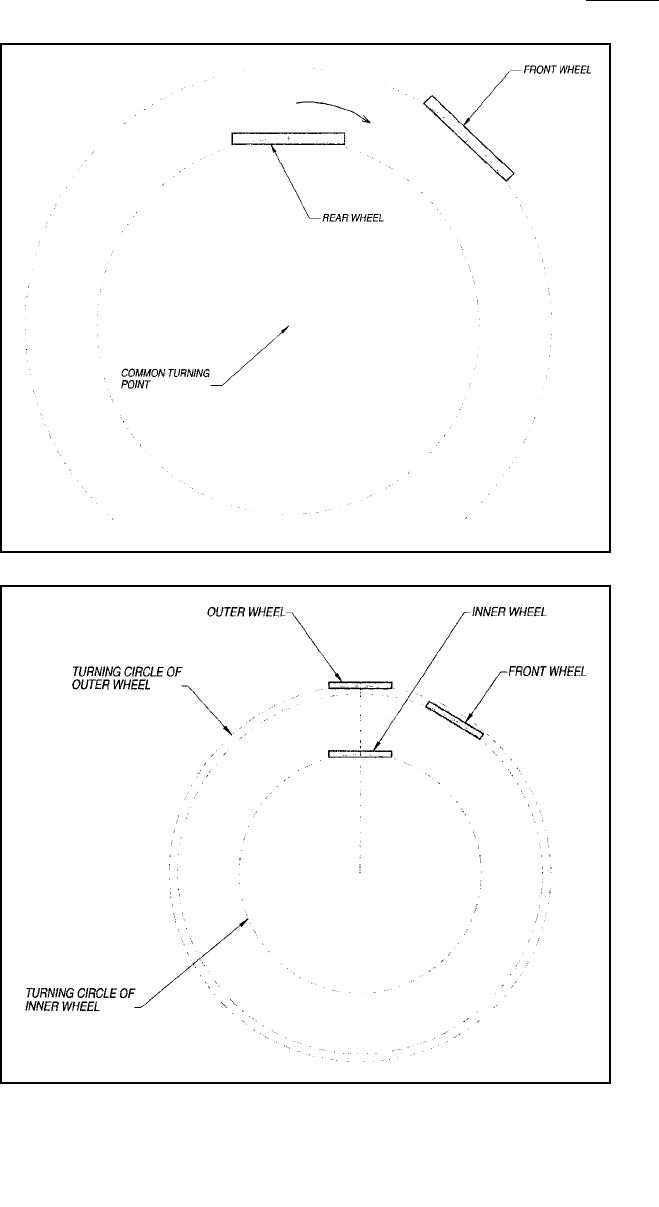
Close observation of a tricycle’s two rear wheels demonstrates
another important fact when turning a corner: the wheel on the inside of
the corner rotates slower than the outside wheel, since the inside wheel is
going around a smaller circle in the same amount of time. This important
detail, shown in Figure 6-3, occurs on all wheeled and tracked vehicles.
If the vehicle’s wheels are inline, there must be some way to allow the
wheels to point in different directions. If there are wheels on either side,
they must be able to rotate at different speeds. Any deviation from this
Chapter 6 Steering History 191
Figure 6-2 Bicycle steering
Figure 6-3 Tricycle steering

192 Chapter 6 Steering History
and some part of the drive train in contact with the ground will have to
slide or skid.
Driving straight in one direction requires at least one single direction
actuator. A wind-up toy is a good demonstration of this ultra-simple
drive system. Driving straight in both directions requires at least one bi-
directional actuator or two single-direction actuators. One of those single
direction actuators can power either a steering mechanism or a second
drive motor. Add one more simple single-direction motor to the wind-up
toy, and it can turn to go in any new direction. This shows that the least
number of actuators required to travel in any direction is two, and both
can be single-direction motors.
In practice, this turns out to be quite limiting, at least partly because it
is tricky to turn in place with only two single direction actuators, but
mostly because there aren’t enough drive and steer options to pick from
to get out of a tight spot. Let’s investigate the many varieties of steering
commonly used in wheeled and tracked robots.
The simplest statically stable vehicle has either three wheels or two
tracks, and the simplest power system to drive and steer uses only two
single-direction motors. It turns out that there are only two ways to steer
these very simple vehicles:
1. Two single-direction motors powering a combined drive/steer wheel
or combined drive/steer track with some other passive wheels or
tracks
2. Two single-direction motors, each driving a track or wheel (the third
wheel on the wheeled layout is a passive swivel caster)
The simplest version of the first steering geometry is a single-wheel
drive/steer module mounted on a robot with two fixed wheels. The com-
mon tricycle uses this exact layout, but so do some automatic guided
vehicles (AGVs) used in automated warehouses. Mobility is limited
because there is only one wheel providing the motive force, while drag-
ging two passive wheels. This layout works well for the AGV application
because the warehouse’s floor is flat and clean and the aisles are
designed for this type of vehicle. In an AGV, the drive/steer module usu-
ally has a bi-directional steering motor to remove the need to turn the
drive wheel past 180° but single direction steer motors are possible.
There are many versions of AGVs—the most complicated types have
four drive/steer modules. These vehicles can steer with, what effectively
amounts to, any common steering geometry; translate in any direction
without rotating (commonly called “crabbing”), pseudo-Ackerman steer,
turn about any point, or rotate in place with no skidding. Wheel modules
Chapter 6 Steering History 193
for AGVs are available independently, and come in several sizes ranging
from about 30 cm tall to nearly a meter tall.
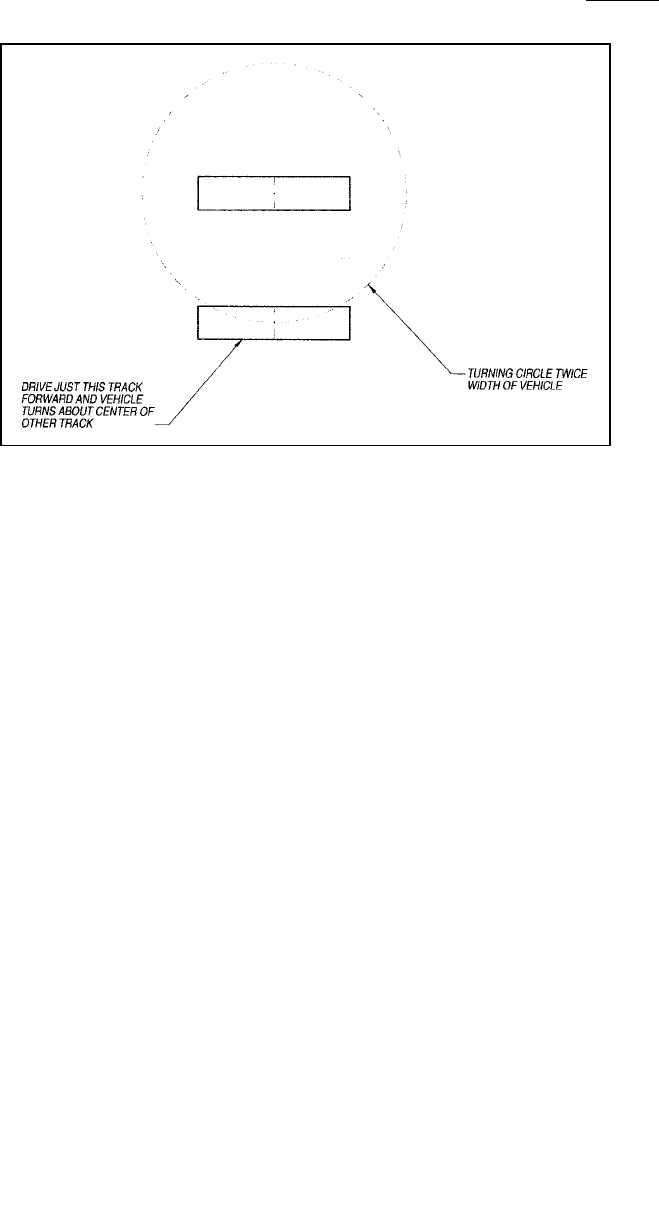
The second two-single-direction motor steering layout has been suc-
cessfully tried in research robots and toys, but it doesn’t provide enough
options for a vehicle moving around in anything but benign environ-
ments. It can be used on tracked vehicles, but without being able to drive
the tracks backwards, the robot can not turn in place and must turn about
one track. Figure 6-4 shows this limitation in turning. This may be
acceptable for some applications, and the simplicity of single direction
electronic motor-driver may make up for the loss of mobility. The
biggest advantage of both of these drive/steering systems is extreme sim-
plicity, something not to be taken lightly.
The Next Step Up
The next most effective steering method is to have one of the actuators
bi-directional, and, better than that, to have both bi-directional. The Rug
Warrior educational robot uses two bi-directional motors—one at each
wheel. This steering geometry (Figure 6-5a, 6-5b) is called differential
steering. Varying the relative speed, between the two wheels turns the
robot. On some ultra-simple robots, like the Rug Warrior, the third
wheel does not even swivel, it simply rolls passively on a fixed axle and
skids when the robot makes a turn. Virtually all modern two-tracked
Figure 6-4 Turning about one
track