Sandin P.E. Robot mechanisms and mechanical devices illustrated
Подождите немного. Документ загружается.

154 Chapter 4 Wheeled Vehicle Suspensions and Drivetrains
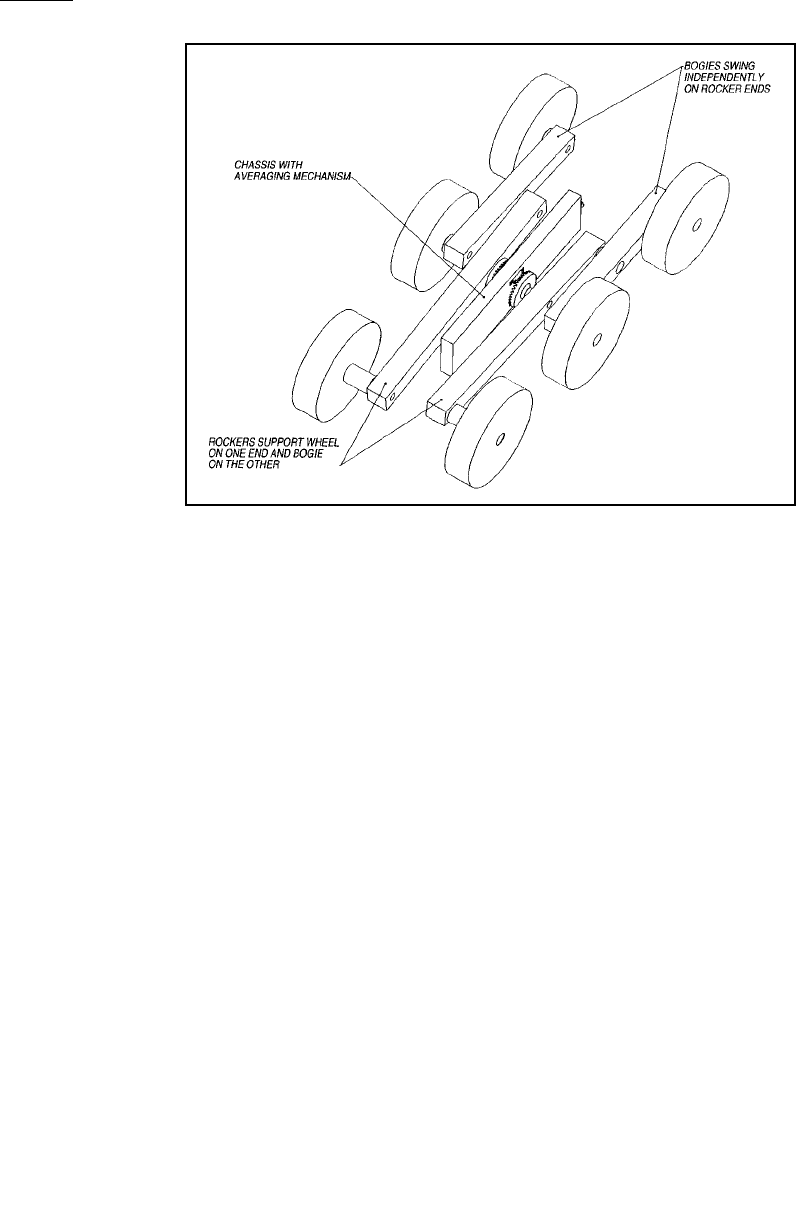
can negotiate obstacles that are twice the wheel height. This figure shows
only the basic parts of the mobility layout. The part labeled “chassis” is
the backbone or main support piece for the main body, which is not
shown.
The very fact that each wheel is passively loaded by the rocker bogie
suspension reduces its negotiable chasm width. Lockable pivots on the
bogie can extend the negotiable chasm width by making the center
wheels able to support the weight of the entire vehicle. This adds yet
another actuator to this already complicated layout. This actuator can be
a simple band or disc brake.
The rocker bogie suspension can be skid steered, but the side forces
on the wheels produce moments in the rockers for which the rockers
must be designed. Since the wheels are at the end of arms that move rel-
ative to each other, the most common layout puts a motor in each wheel.
Steering is done by turning both the front and the rear wheels with their
own steering motors. This means that this layout uses 10 motors to
achieve its very high mobility. In this design, the large number of actua-
tors reduces the number of moving parts and over all complexity.
The steering geometry allows turning in place with no skidding at all.
This is the layout used on Sojourner, the robot that is now sitting on Mars
after completing an entirely successful exploration mission on the Red
Planet. Mobility experts claim this layout has the highest mobility possi-
Figure 4-26 Rocker bogie
Chapter 4 Wheeled Vehicle Suspensions and Drivetrains 155
ble in a wheeled vehicle, but this high mobility comes at the cost of those
ten actuators and all their associated control electronics and debug time.
There is a layout that is basically six-wheeled, but with an extra pair
of wheels mounted on flippers at the front. These wheels are powered
with the three on each side and the vehicle is skid steered, but the front
set of wheels are only placed on the ground for extra traction and stair
climbing. This layout is in the same category as several layouts of
tracked vehicles, as are several of the eight-wheeled layouts.
The next logical progression, already commercially available from
Remotec in a slight variation, is to put the four center wheels on the
ground, and put both end pairs on flippers. The center pair, instead of
wheels, could be tracks, as it is on Remotec’s Andros. The flippers
carry either wheels or short tracks. This vehicle is rather complicated,
but has great mobility since it can reconfigure itself into a long stair-
climbing or crevasse-crossing layout, or fold up into a short vehicle
about half as long.
EIGHT-WHEELED LAYOUTS
If six wheels are good then eight wheels are better, right? For a certain
set of requirements, eight wheels can be better than six. There is, theo-
retically, more surface area simply because there are more wheels, but
this is true mostly if there is a height limitation on the robot. If the robot
needs to be particularly low for its size, then eight wheels may be the
answer.
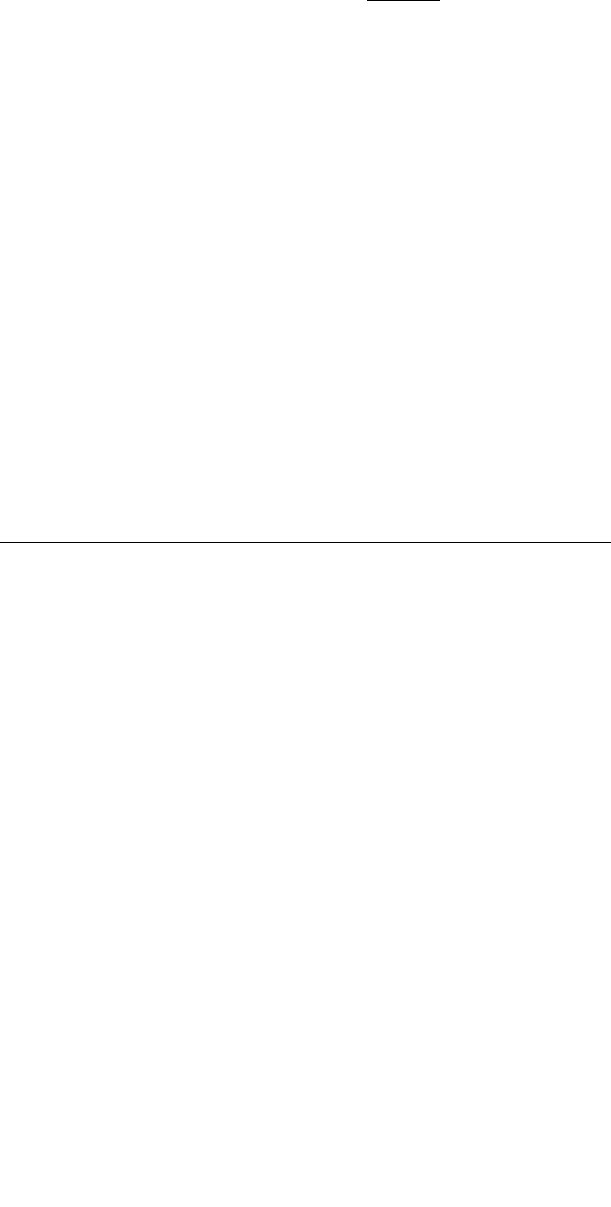
The most common layout for eight wheels, since inherently there are
more moving parts already, is to skid-steer with fixed wheels. Lowering
the center two pairs aids in skid steering just like on a six wheeled skid
steer, but the four wheels on the ground means there is less wobbling
when stopping and starting. Figure 4-27 shows this basic layout with the
center wheels lowered slightly.
With all the wheels fixed there are many times when several of the
wheels will be lifted off the ground, reducing traction greatly. A simple
step to reduce this problem is to put the wheels on rockers, in pairs on
each side. A set of wheels may still leave the ground in some terrains, but
the other six wheels should remain mostly in contact with the ground to
give some traction. Adding steering motors at the attachment point of
each rocker would produce four-corner steering with minimal skidding.
Since the bogie is a fairly simple arm connecting only a pair of wheels, a
single motor could potentially be mounted near the center of the bogie
and through a power transfer system, drive both wheels. This would
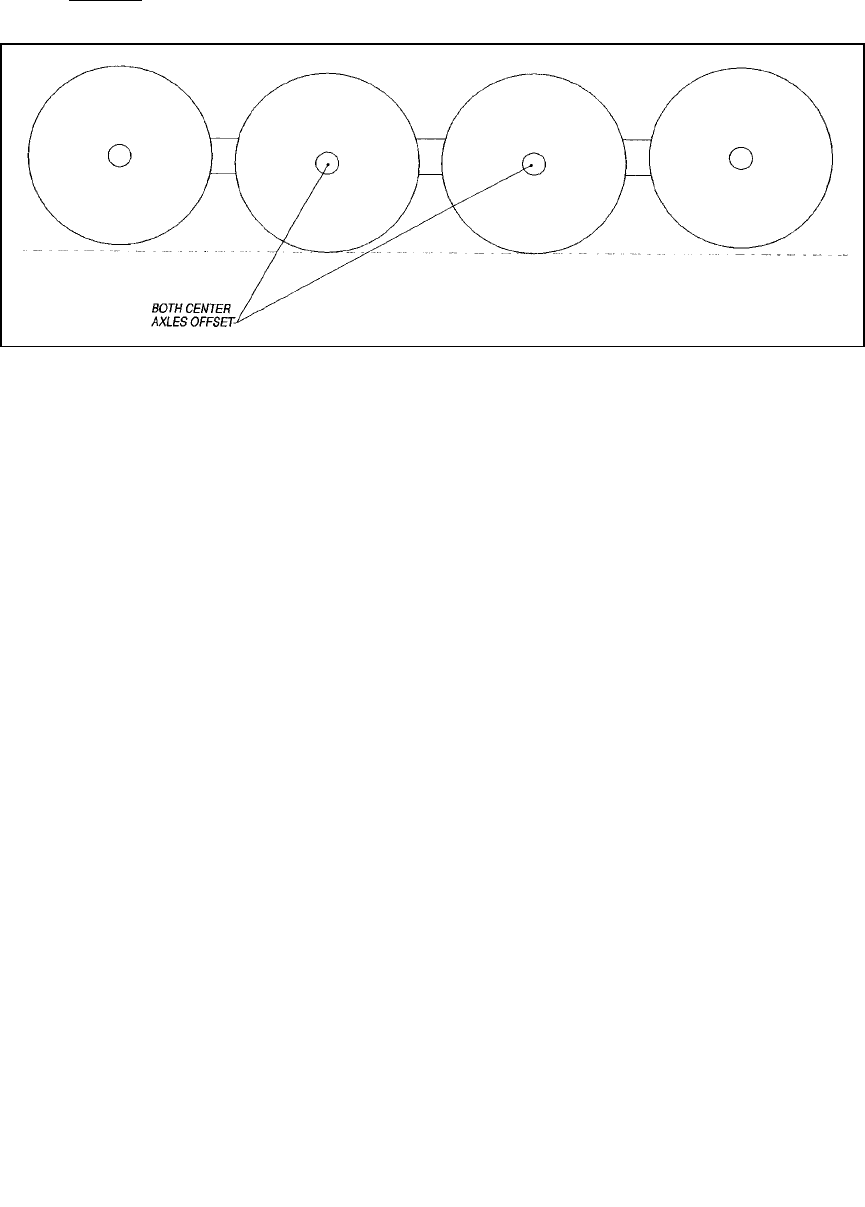
156 Chapter 4 Wheeled Vehicle Suspensions and Drivetrains
reduce the number of actuators, even with four corner steering, to eight.
No known instances of this layout, shown in Figure 4-28, have been built
for testing, though it seems like an effective layout.
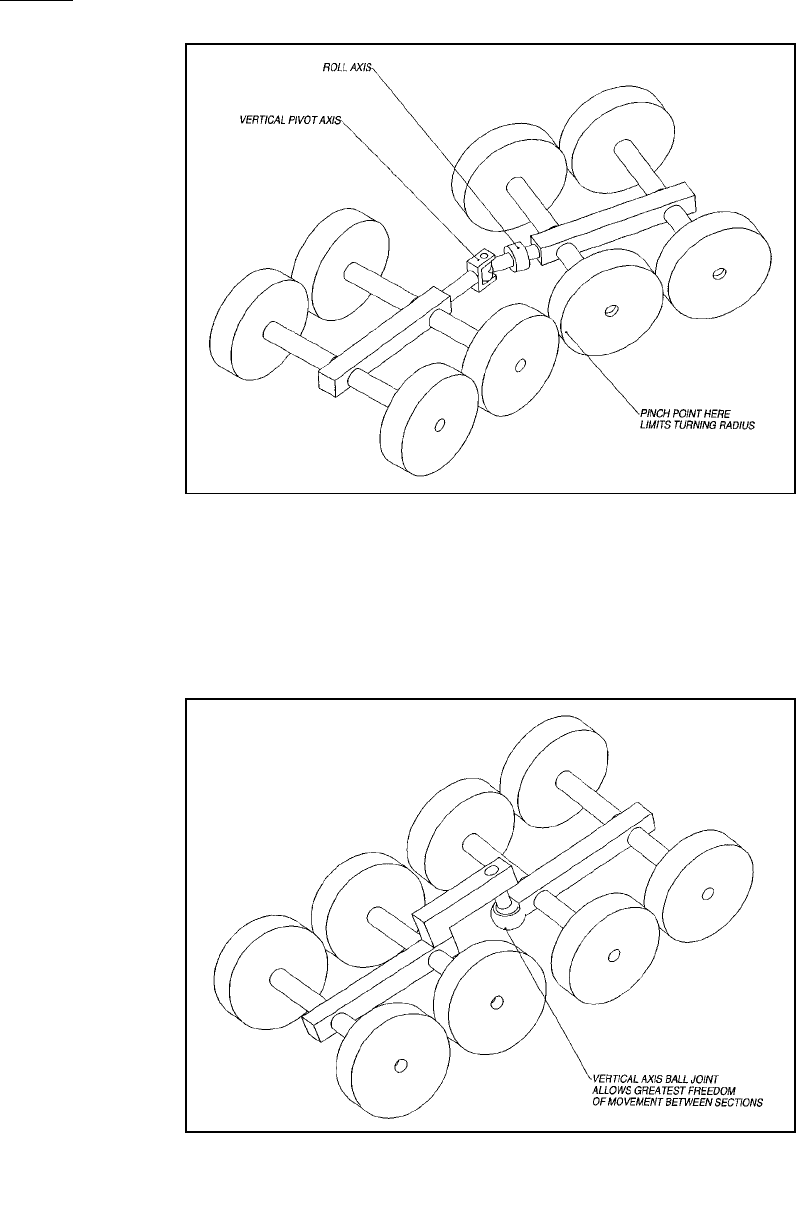
With eight wheels, there is the possibility of dividing the vehicle into
two sections, each with four wheels. The two parts are then either con-
nected through a passive joint and individually skid steered, or the joint
is articulated and steering is done by bending the vehicle in the middle.
This is identical to the four tracked layouts discussed and shown in chap-
ter five. This can be a very effective layout for obstacle negotiation and
crevasse crossing, but cannot turn in place. Figure 4-29 shows an exam-
ple of a two-part passive joint eight-wheeled layout. Figure 4-30 adds a
roll joint to aid in keeping more wheels on the ground.
Another eight-wheeled layout, also applicable to a four-tracked vehi-
cle, uses a transverse pivot, which allows the two halves to pitch up and
down. It is skid steered, and is suited for bumpy terrain, but which has
few obstacles it must go around. Imagine the vehicle in Figure 4-30, but
with the pivot axis on its side. This layout is similar to the double rocker
layout, with similar mobility and fewer moving parts.
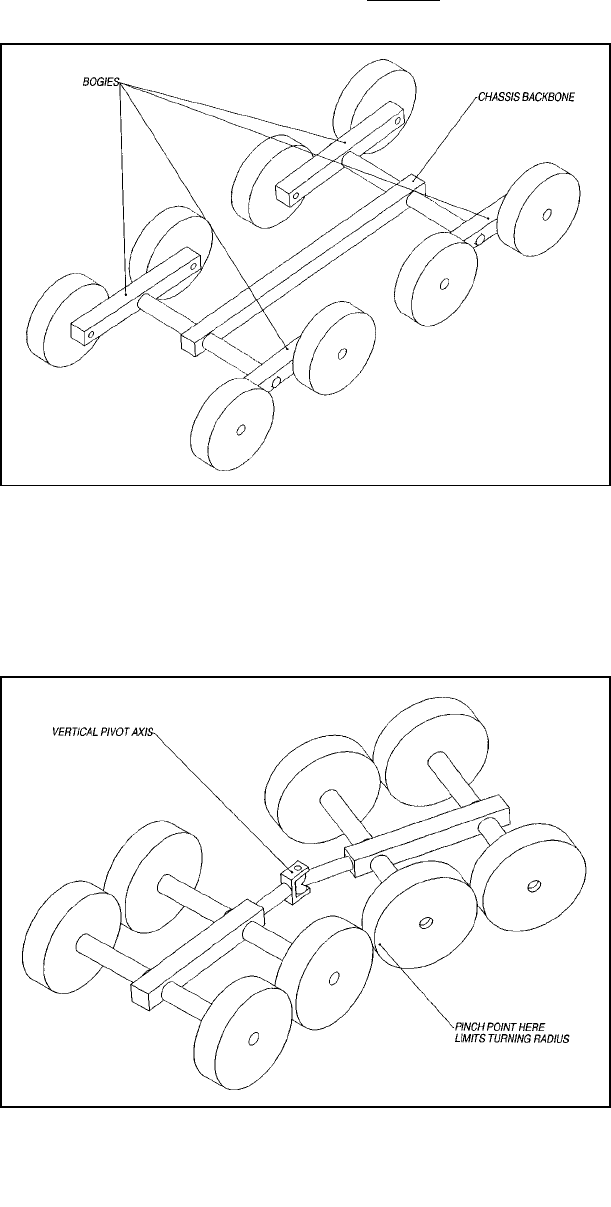
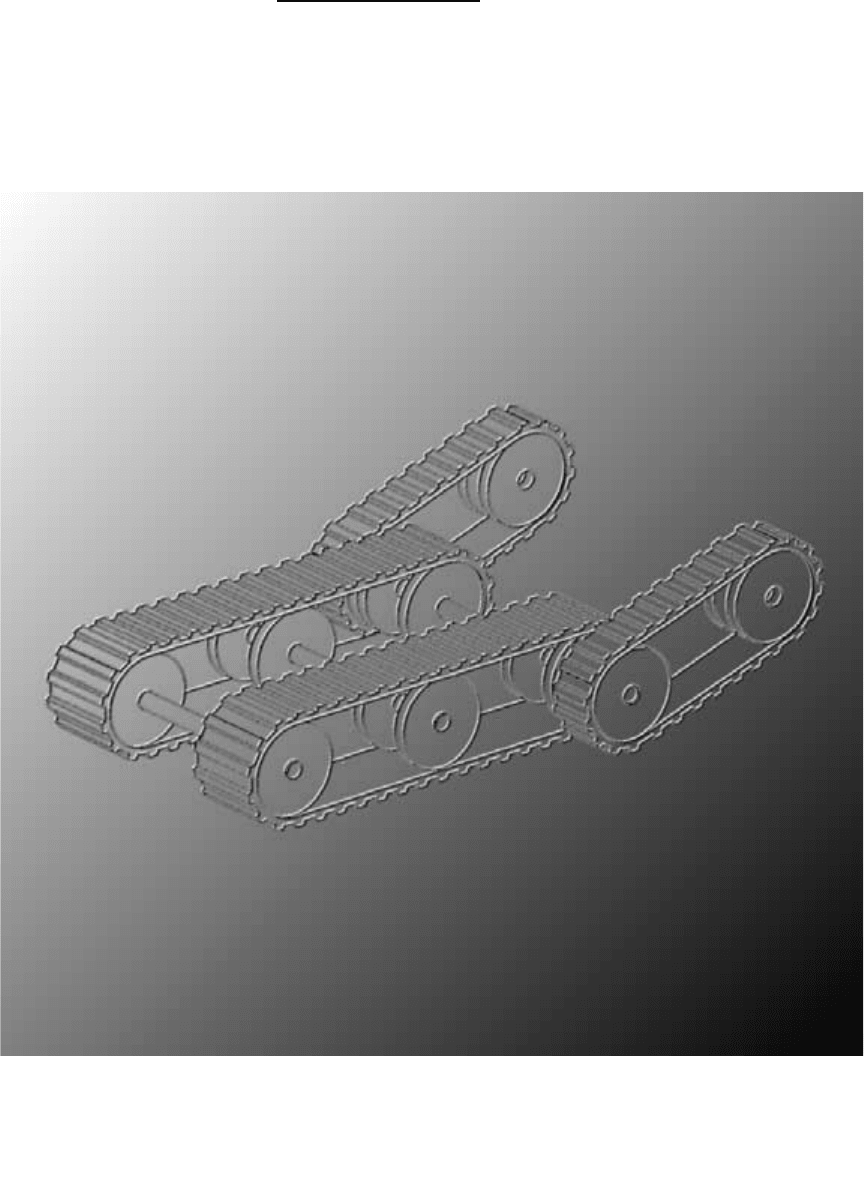
The two halves of an eight-wheeled layout can also be coupled
together with a ball joint. The ball joint allows pitch, roll, and yaw
between the two parts which facilitates keeping all eight wheels on the
ground most of the time. The ball joint is a simple joint and can be made
robust. It has a limited range of motion around two of the axis, but the
third axis can rotate three hundred sixty degrees. Aligning this axis verti-
cally aligns it in the steering axis. This allows the vehicle to have a
tighter steering radius, but it cannot turn in place. Figure 4-31 shows the
four-wheeled sections connected through a vertical axis ball joint. The
ball joint is difficult to use with a four-wheeled vehicle because the
Figure 4-27 Eight wheels, all fixed, center axles offset
Chapter 4 Wheeled Vehicle Suspensions and Drivetrains 157
wheel torque would try to spin the section around the wheels. This prob-
lem can be reduced if the wheels are coupled together so their torques
are always nearly indentical.
Figure 4-28 Eight wheels, dou-
ble bogie
Figure 4-29 Two part, eight
wheeled, vertical center pivot
158 Chapter 4 Wheeled Vehicle Suspensions and Drivetrains
For a truly complicated wheeled drive mechanism, the Tri-star Land-
Master from the movie Damnation Alley is probably the most impres-
sive. This vehicle, of which only one was built, is a two-section, center
pivot steered layout with a Tri-star wheel at each corner. The Tri-star
wheels consist of three wheels, all driven together, arranged in a three-
Figure 4-30 Two part, eight
wheeled, vertical and roll joints
Figure 4-31 Two part, eight
wheeled, vertical ball joint

Chapter 4 Wheeled Vehicle Suspensions and Drivetrains 159
pointed star on a shared hub that is also driven by the same shaft that
drives the wheels. When a bump or ditch is encountered that the wheels
alone cannot traverse, the whole three-wheeled system rotates around the
center hub and the wheels essentially become very large cleats. The Tri-
star wheels are driven through differentials on the Land-Master, but pow-
ering each with its own motor would increase mobility even further.

This page intentionally left blank.
Chapter 5 Tracked Vehicle
Suspensions
and Drivetrains
Copyright © 2003 by The McGraw-Hill Companies, Inc. Click here for Terms of Use.

This page intentionally left blank.

T
here has long been a belief that tracks have inherently better mobil-
ity than wheels and anyone intending to design a high mobility vehi-
cle should use tracks. While tracks can breeze through situations where
wheels would struggle, there are only a few obstacles and terrains which
would stop a six wheeled rocker bogie vehicle, but not stop a similar
sized tracked vehicle. They are
• very soft terrain: loose sand, deep mud, and soft powder snow
• obstacles of a size that can get jammed between wheels
• crevasses
They get this higher mobility at a cost of greater complexity and lower
drive efficiency, so tracks are better for these situations, but not inher-
ently better overall.
Tracked vehicles first started to appear in the early 1900s and were
used extensively in WWI. The basic layout used then is still in use today
on heavy construction equipment; a drive sprocket at one end, an idler
wheel at the other that usually serves as a tensioner, and something in
between to support the tracks on the ground. This basic, simple layout is
robust and easy to control. Even in its most simple form, this track layout
has all of the improvements over wheels previously listed.
The continuous surface in contact with the ground is what produces
the benefits of tracks. The long surface combined with widths similar to
wheels puts a large surface on the ground. This lowers ground pressure,
allowing traveling on softer surfaces. It also provides more area for
treads, increasing the number of teeth on the ground.
The continuous surface eliminates a wheeled vehicle’s problem of
becoming high centered between the wheels on one side. A correctly
sized obstacle can get caught between the wheels on one side, but the
track stays on top. The wheeled vehicle can get stuck in these situations,
where the track would simply roll over the obstacle.
Perhaps the most important capability the continuous surface facili-
tates that a wheeled suspension cannot match (without undue complex-
ity) is the ability to cross crevasses. Clever suspension components can
be added to a six-wheeled or eight-wheeled vehicle to increase its nego-
163