Руководство по программированию токарного станка с системой ЧПУ MELDAS серии 60 Meldasmagic 64
Подождите немного. Документ загружается.


13. Вспомогательные программные параметры
13.16 Макропрерывание
Тип прерывания
Типы прерывания 1 и 2 могут выбираться при помощи параметра "#1113 INT_2".
[Тип 1]
• Если введен сигнал прерывания (UIT), система незамедлительно остановит
передвижение резца и прервет выдержку времени, после чего разрешит активацию
программы прерывания.
• Если программа прерывания содержит команду функции движения или внесистемной
функции (MSTB), команды в прерванном блоке утрачиваются. После завершения
программы прерывания основная программа продолжит операцию блока, следующего
за прерванным блоком.
• Если программа прерывания не содержит команду функции движения или
внесистемной функции (MSTB), операция будет продолжена commands после
завершения программы прерывания с того момента в блоке, в который произошло
прерывание.
Если сигнал прерывания (UIT) введен во время выполнения команды внесистемной функции
(MSTB), система NC будет ждать сигнала завершения (FIN). Таким образом, система
будет выполнять команду движения или внесистемной функции (MSTB) в программе
прерывания только после ввода FIN.
[Тип 2]
• При вводе сигнала прерывания (UIT) программа завершит выполнение команд в
текущем блоке, после чего передаст управление программе прерывания.
• Если программа прерывания не содержит команду функции движения или
внесистемной функции (MSTB), программа прерывания будет выполнена без
выполнения прерывания текущей программы.
Однако если программа прерывания не была завершена даже после окончания
выполнения первичного блока, может произойти временная приостановка обработки
системы.
462
13. Вспомогательные программные параметры
13.16 Макропрерывание
463
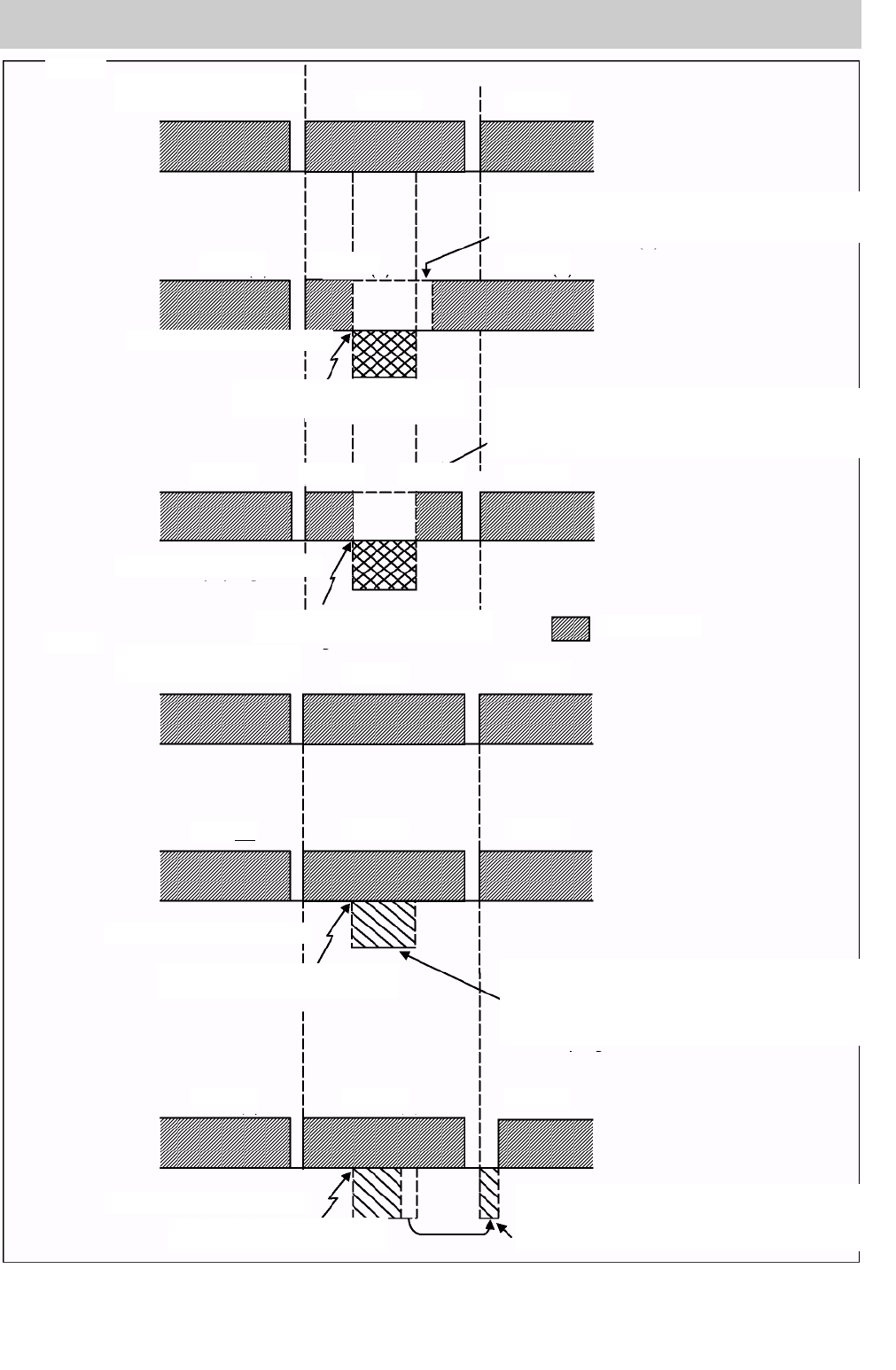
[Тип 1]
Основная программа
блок
(
1
)
блок
(
2
)
блок
(
3
)
Если программа прерывания содержит команду
движения или функцию внесистемной команды,
сб
р
ос блока
(
2
)
те
р
яется.
блок
(
3
)
блок
(
1
)
блок
(
2
)
Программа прерывания
Сигнал макропрерывания
пользователя
Если программа прерывания не содержит команду
движения или функцию внесистемной команды,
продолжается операция с момента остановки в
блоке (2), то есть, все команды сброса.
блок
(
2
)
блок
(
1
)
блок
(
2
)
блок
(
3
)
Программа прерывания
Сигнал макропрерывания
пользователя
Выполнени
е
[Тип 2]
Основная программа
блок
(
1
)
блок
(
3
)
блок
(
2
)
блок
(
2
)
блок
(
3
)
бл
о
к
(
1
)
Программа прерывания
Если прерванная программа не содержит
команду движения или функцию внесистемной
команды, продолжается выполнение
прерванной программы параллельно с
выполнением тек
у
щей п
р
ог
р
аммы.
Сигнал макропрерывания
пользователя
блок
(
2
)
блок
(
3
)
блок
(
1
)
Команда движения и внесистемная
команда в программе прерывания
выполняются после завершения
тек
ущ
его блока.
Программа прерывания
Сигнал макропрерывания
пользователя
13. Вспомогательные программные параметры
13.16 Макропрерывание
Способ вызова
Макропрерывания пользователя классифицируется на следующие два типа в зависимости
от способа вызова программы прерывания. Эти два типа прерывания выбираются при
помощи параметра "#1229 set01/bit0".
a. Подпрограммный тип прерывания
b. Макротип прерывания
Оба типа прерывания включены в расчет уровня вложений. Подпрограммы и макросы
пользователя, вызванные в программе прерывания, также включены в расчет уровня
вложений.
Подпрограммный
тип прерывания
Программа макропрерывания пользователя вызывается как
подпрограмма. Как и при вызове при помощи M98, уровень локальной
переменной остается без изменений до и после прерывания
Макротип
прерывания
Программа макропрерывания пользователя вызывается как макрос
пользователя. Как и при вызове при помощи G65, уровень локальной
переменной изменяется до и после прерывания. Аргументы в основной
программе не могут быть переданы в программу прерывания.
Принятие сигнала макропрерывания пользователя (UIT)
Сигнал макропрерывания пользователя (UIT) принимается в следующих двух режимах.
данные два режима выбираются при помощи параметра "#1112 S_TRG".
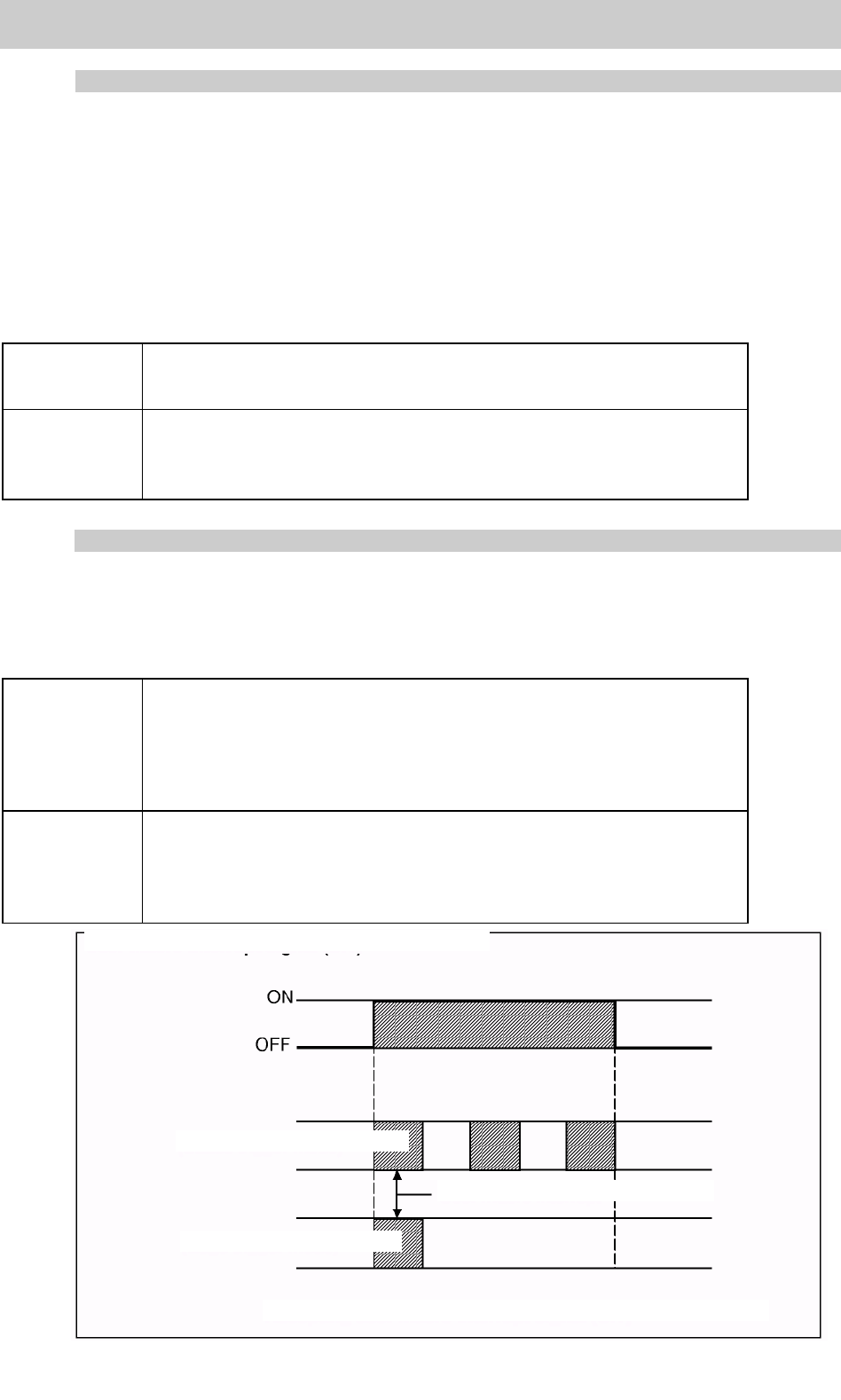
a. Режим триггера состояния
b. Режим крайнего триггера
Режим
триггера
состояния
Сигнал макропрерывания пользователя (UIT) принимается как
действительный, если он ВКЛ. Если сигнал прерывания (UIT) ВКЛ при
активированной функции макропрерывания пользователя при помощи
M96, программа прерывания активируется.
При сохранении сигнала прерывания (UIT) ВКЛ, программа
прерывания может выполняться повторно.
Режим
крайнего
триггера
Сигнал макропрерывания пользователя (UIT) принимается как
действительный по его нарастающему фронту, то есть при его
включении.
Данный режим нужен для однократного выполнения программы
прерывания.
464
Сигнал макропрерывания пользователя
(
UI
T
)
(
Режим триггера состояния
)
Макропрерывание пользователя
(
Режим крайнего триггера
)
Принятие сигнала макропрерывания пользователя
(
UI
T
)
13. Вспомогательные программные параметры
13.16 Макропрерывание
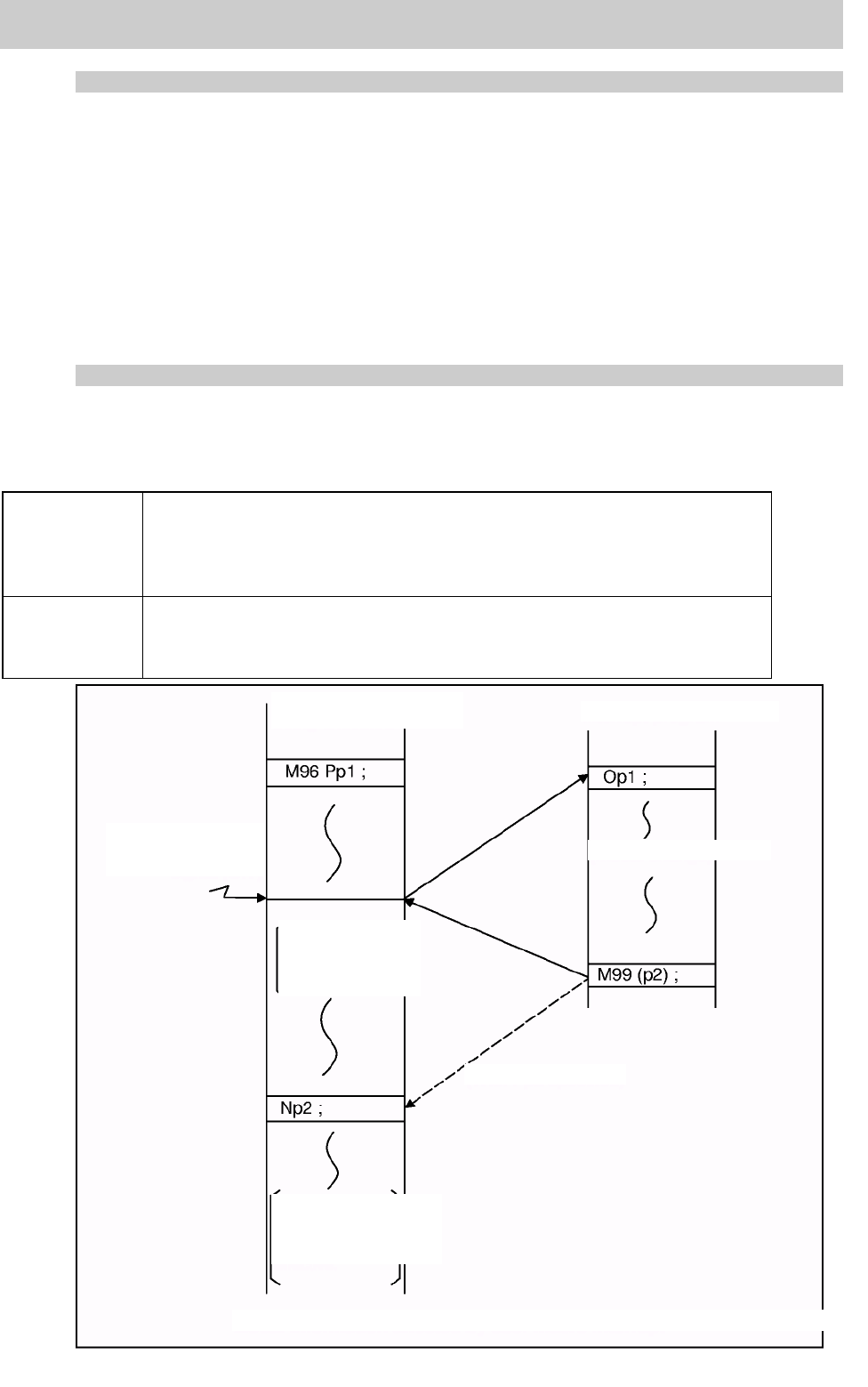
Возврат из макропрерывания пользователя
M99 (P_) ;
Команда M99 задается в программе прерывания для возврата к основной программе. Адрес
P используется для задания номера последовательности конечной цели возврата в
основной программе. В блоках от следующего за прерванным блоком до последнего блока
происходит сначала поиск блока с номером последовательности Np2 ;. Если его найти не
удалось, происходит поиск в блоках, предшествующих прерванному блоку. Таким образом,
управление передается блоку с номером последовательности r Np2 ; который будет найден
первым при указанном выше поиске.
(Эквивалентно M99 P_, используемой после вызова M98.)
Модовые данные, на которые влияет макропрерывание пользователя
Если модовые данные изменяются программой прерывания, производятся следующие
действия после передачи управления от программы управление основной программе.
Возврат при
помощи M99 ;
Изменение модовых данных программой прерывания считается
недействительным, после чего происходит восстановление оригинальных
модовых данных. Однако для типа прерывания 1, если программа
прерывания содержит команду движения или внесистемной функции
(MSTB), оригинальные модовые данные не восстанавливаются.
Возврат при
помощи M99
P_ ;
Оригинальные модовые данные обновляются при изменении в
программе прерывания даже после возврата к основной программе. Это
эквивалентно возврату при помощи M99 P_ ; из программы, вызванной
при помощи M98.
465
Выполняемая
основная п
р
ог
р
амма
Программа прерывания
Сигнал
макропрерывания
пользовтаеля
(Модовые изменения)
Восстанавливаются
модовые данные до
прерывания.
(При указании Pp2)
Модовые данные,
измененные
программой
п
р
е
р
вания
,
остаются
Модовые данные, на которые влияет макропрерывание пользователя
13. Вспомогательные программные параметры
13.16 Макропрерывание
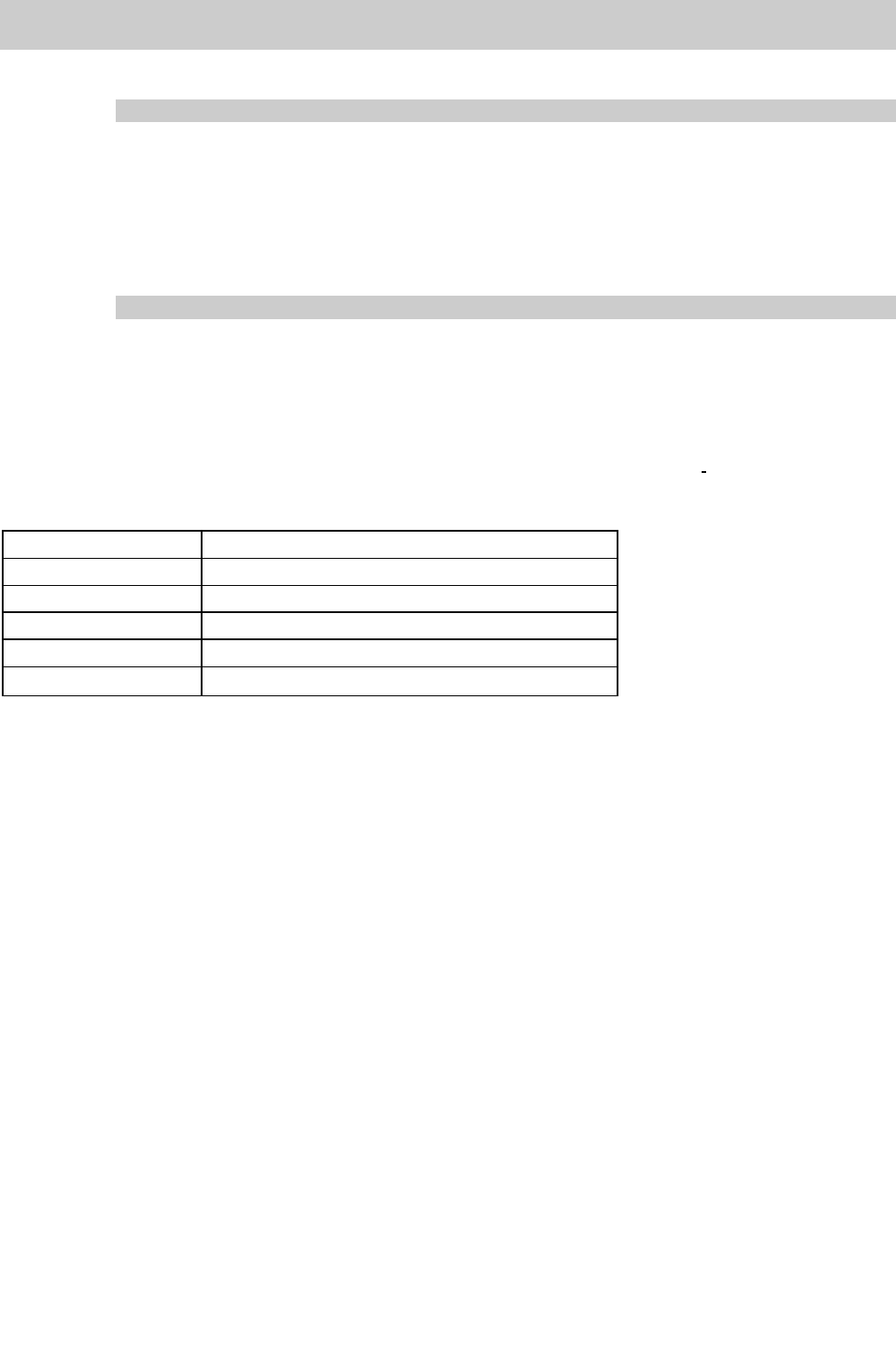
Переменные модовых данных (#4401 - #4520)
Модовые данные при передаче управления программе макропрерывания пользователя
могут распознаваться при чтении системных переменных #4401 - #4520. Действует
единица, заданная при помощи команды.
Системная переменная Модовые данные
#4401 ~ #4421
G код (группа 01 – группа 21)
#4507
D код
#4509
F код
#4511
H код
#4513
M код
#4514
Номер последовательности
#4515
Номер программы
#4519
S код
#4520
T код
Некоторые группы не
используются.
Указанные выше системные переменные доступны только в программе макропрерывания
пользователя. Если они используются в других программах, выдается программная ошибка
(P241).
M код для управления макропрерыванием пользователя
Управление макропрерыванием пользователя осуществляется при помощи M96 и M97.
Однако данные команды уже могут быть использованы для других операций. Специально
для такого случая данные командные функции могут быть назначены другим M кодам.
(Это делает недействительной совместимость программы.)
Управление макропрерыванием пользователя при помощи альтернативных M кодов
возможно при настройке альтернативного M в параметрах "#1110 M96_M" и "#1111
M97_M", а также при задании действительного статуса для настройки при выборе
параметра "#1109 subs_M".
(M коды 03 - 97 кроме 30 доступны для данных целей.)
Если параметр "#1109 subs_M", используемый для активации альтернативных М кодов, не
выбран, коды M96 и M97 остаются эффективными для управления макропрерыванием
пользователя.
В любом случае обработка M кодов для управления макропрерыванием пользователя
производится внутри системы и не выводится.
466
13. Вспомогательные программные параметры
13.16 Макропрерывание
Параметры
Смотри инструкцию по эксплуатации для получения подробной информации по способам
настройки.
(1) Статус вызова подпрограммы "#1229 set01/bit 0"
1 : Подпрограммный тип макропрерывания пользователя
0 : Макротип макропрерывания пользователя
(2) Статус режима триггера состояния "#1112 S_TRG"
1 : Режим триггера состояния
0 : Режим крайнего триггера
(3) Статус прерывания тип 2 "#1113 INT_2"
1 : Операторы выполнения программы в программе прерывания выполняются
после завершения выполнения текущего блока. (Тип 2)
0 : Операторы выполнения программы в программе прерывания выполняются
перед завершением выполнения текущего блока (Тип 1)
(4) Статус альтернативного М кода для управления макропрерыванием пользователя
"#1109 subs_M"
1 : Действительно
0 : Недействительно
(5) Альтернативные М коды для макропрерывания пользователя
М код активации прерывания (эквивалент M96) "#1110 M96_M"
М код деактивации прерывания (эквивалент M97) "#1111 M97_M"
Ограничения
(1) Если программа макропрерывания пользователя использует системные
переменные #5001 и далее (данные позиции) для считывания координат,
используются координаты, предварительно считываемые в буфер.
Если произошло прерывание во время выполнения коррекции диаметра резца,
должен быть указан номер последовательности (M99 P_ ;) при помощи команды для
возврата из программы макропрерывания пользователя. Если номер
последовательности не указан, невозможно выполнение стандартного возврата
управления к основной программе
467
13. Вспомогательные программные функции
13.17 Возврат к позиции изменения резца
13.17 Возврат к позиции изменения резца; G30.1 ~ G30.5
Функция и назначение
Посредством задания позиции изменения резца в параметре (#8206 изменение резца), а
также задания команды возврата к позиции изменения резца в программе обработки,
возможна смена резца в наиболее подходящей для этого позиции.
Оси, которые должны вернуться к позиции изменения резца, а также очередность, в которой
будет происходить возврат, могут быть изменены при помощи команд.
Формат команды
(1) Формат команд возврата к позиции изменения резца является следующим.
G30.n ;
n = 1 - 5 Указать оси, которые будут возвращены к позиции изменения резца и
очередность, в которой будет производиться возврат.
Команды и очередность возврата
Команда Очередность возврата
G30.1
Только ось X ( → дополнительная ось)
G30.2
Только ось Z ( →дополнительная ось)
G30.3
Ось X → ось Z ( →дополнительная ось)
G30.4
Ось Z → ось X ( →дополнительная ось)
G30.5
Ось X • ось Z ( →дополнительная ось)
(Примечание 1) Стрелка (→) указывает очередность осей возврата. Период (• )
указывает на то, что возврат осей начнется синхронно.
Пример : "Ось Z → ось X " указывает на то, что сначала ось Z вернется в
позицию изменения резца, а затем ось X.
(2) Включение / выключение возврата к позиции изменения резца для дополнительной оси
может быть задано при помощи параметра "#1092 Tchg_A" для дополнительной оси.
Что касается очередности возврата к позиции изменения резца, возврат осей будет
производиться после того, как завершиться возврат стандартной оси к позиции
изменения резца (смотри приведенную выше таблицу). Что касается случаев, когда в
наличии имеются две дополнительные оси, две дополнительные оси будет синхронно
возвращаться к позиции изменения резца после того, как стандартная ось завершит
возврат к позиции изменения резца. Дополнительная ось самостоятельно не может
вернуться к позиции изменения резца.
468
13. Вспомогательные программные функции
13.17 Возврат к позиции изменения резца
Подробное описание
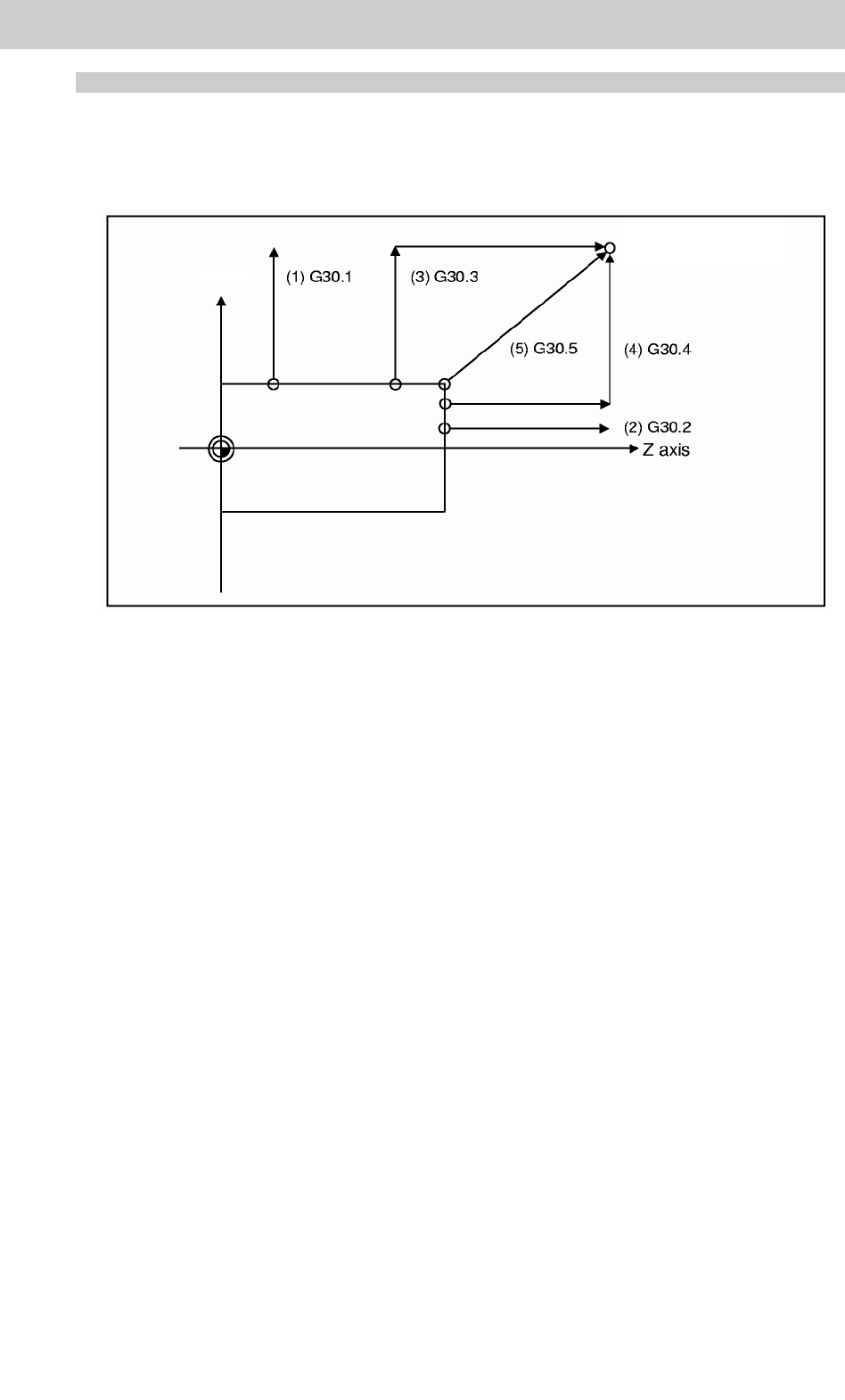
(1) На следующей схеме показан пример операции во время выполнения команды
возврата к позиции изменения резца.
(1) Команда G30.1:
Только ось X вернется в позицию изменения резца. (Если возврат к позиции
изменения резца задан для дополнительной оси, дополнительная ось также
возвращается к позиции изменения резца после того, как ось Х достигнет позиции
изменения резца.)
(2) Команда G30.2:
Только ось Z вернется в позицию изменения резца. (Если возврат к позиции
изменения резца задан для дополнительной оси, дополнительная ось также
возвращается к позиции изменения резца после того, как ось Z достигнет позиции
изменения резца.)
(3) Команда G30.3:
Ось X вернется в позицию изменения резца, затем ось Z сделает то же самое.
(Если возврат к позиции изменения резца задан для дополнительной оси,
дополнительная ось также возвращается к позиции изменения резца после того,
как оси X и Z достигнут позиции изменения резца.)
(4) Команда G30.4:
Ось Z вернется в позицию изменения резца, затем ось X сделает то же самое.
(Если возврат к позиции изменения резца задан для дополнительной оси,
дополнительная ось также возвращается к позиции изменения резца после того,
как оси X и Z достигнут позиции изменения резца.)
(5) Команда G30.5:
Оси X и Z вернутся в позицию изменения резца одновременно. (Если возврат к
позиции изменения резца задан для дополнительной оси, дополнительная ось
также возвращается к позиции изменения резца после того, как оси X и Z
достигнут позиции изменения резца.)
469
Позиция
изменения резца
Ось X
13. Вспомогательные программные функции
13.17 Возврат к позиции изменения резца
(2) После того, как все необходимые возвраты к позиции изменения резца завершены при
помощи команды G30.n, включается сигнал завершения возврата к позиции изменения
резца TCP (X22B). Если одна из осей, которые вернулись в позицию изменения резца
после выполнения команды G30.n, покинет позицию изменения резца, сигнал TCP
выключается.
(При помощи команды G30.3, например, сигнал TCP включается, если ось Z достигла
позиции изменения резца после выполнения этой же операции осью X (предполагаемый
возврат к позиции изменения резца для дополнительной оси выключен). Затем сигнал
TCP будет отключен, если ось X или Z покинет данную позицию. Если возврат к
позиции изменения резца будет включен для дополнительной оси при помощи
параметра "#1092 Tchg_A", сигнал TCP включается, если дополнительная ось или оси
достигли позиции изменения резца после того, как эту операцию выполнили
стандартные оси. Затем производится отключение сигнала, если одна из осей X, Z, и
дополнительных осей покинет данную позицию.)
(3) Данные коррекции резца, например смещение по длине резца и коррекция по износу
вершины резца, временно отменяются при помощи команды возврата к позиции
изменения резца. Станок переместится к позиции изменения резца, заданной в
параметрах, однако так как уровень коррекции резца сохранен в памяти, он
переместится при помощи следующей команды движения в позицию с применением
коррекции резца.
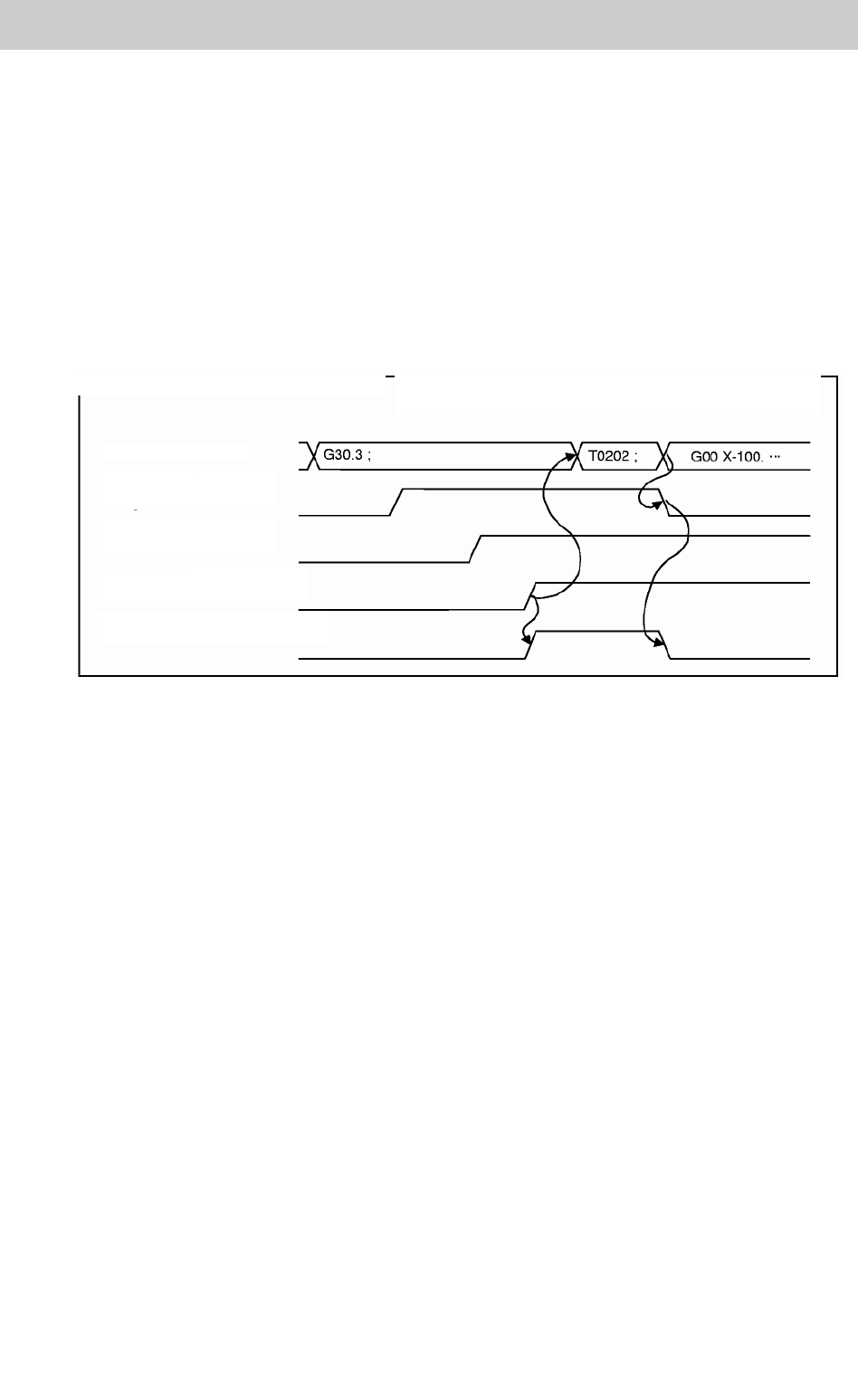
(4) Команда выполняется посредством деления блоков для каждой. Если данная команда
задана во время поблочного выполнения операции, будет производиться остановка
блока каждый раз, когда произойдет возврат одной оси к позиции изменения резца.
Чтобы произвести возврат следующей оси в нулевую точку обработки, необходимо
задать начало цикла.
470
(Команда G30.3 возврата к позиции изменения
рез
ц
а
д
ля дополнительной оси включена
)
[Временная диаграмма вывода сигнала]
Программа обработки
Выход оси X на позицию
изменения резца
Выход оси Z на позицию
изменения резца
Выход дополнительной оси на
позицию изменения резца
Сигнал завершения возврата к
позиции изменения резца (TCP)
13. Вспомогательные программные функции
13.18 ASCII макрокодировка
13.18 ASCII макрокодировка
Функция и назначение
Макропрограмма может быть вызвана посредством настройки соответствия
подпрограммы (макропрограммы), предварительно зарегистрированной при помощи
параметров, кодам, а затем задания кода ASCII в программе обработки.
Данная функция может быть использована в дополнение к функции макровызова
внесистемной команды G, M, S, T и B.
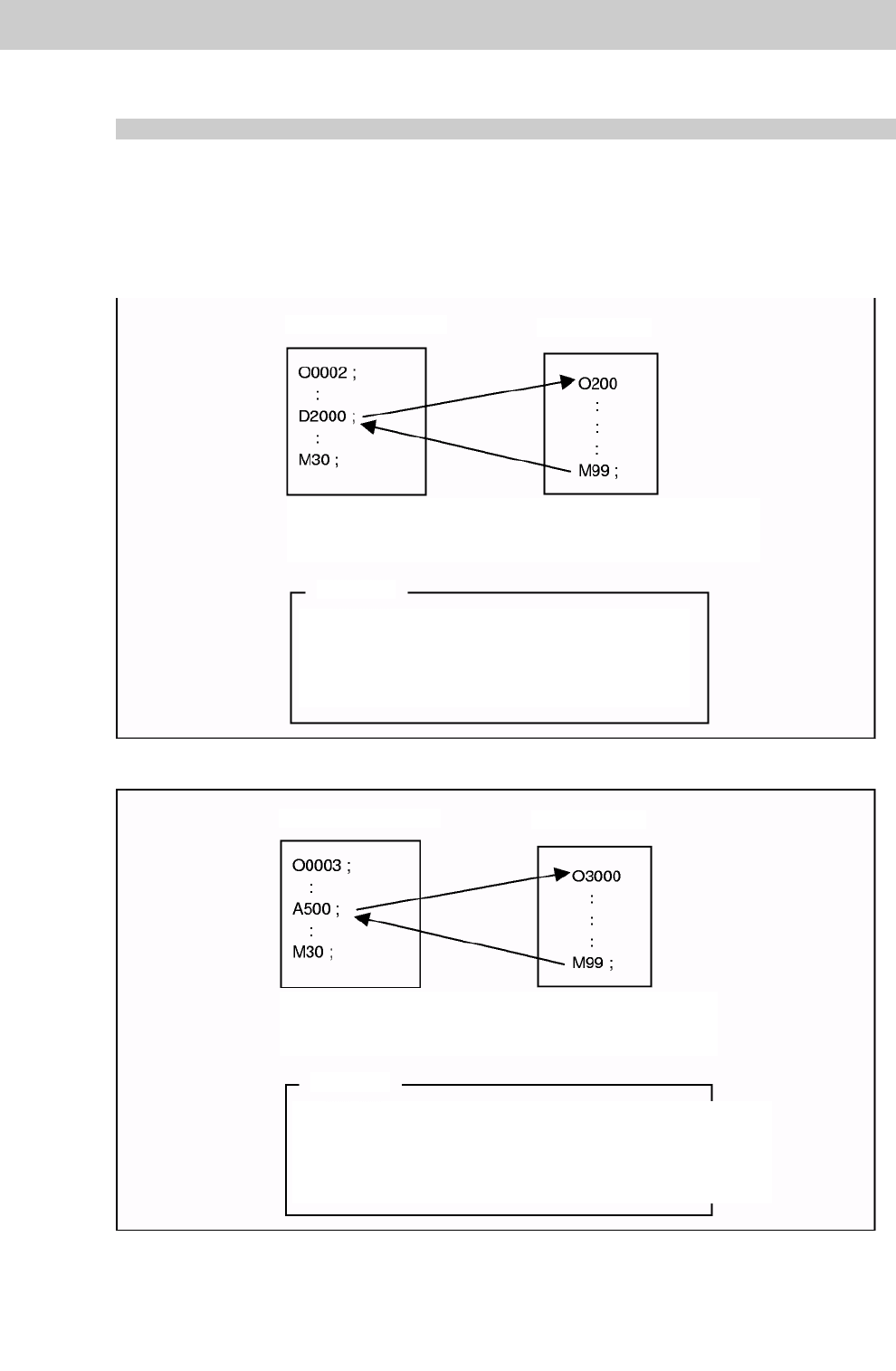
Пример выполнения 1) тип M98
Пример выполнения 2) тип G65
471
Основная программа
Подпрограмма
После вывода 2000 для стандартной переменнойe #146
подпрограмма с номером 200 вызывается при помощи типа
вызова подпрограммы M98.
Параметр
#7401 (ASCII [01] Действ./Недейств) 1 (Действ.)
#7402 (ASCII [01] Код) D
#7403 (ASCII [01] Тип) 0 (M98 тип)
#7404 (ASCII [01] № программы) 200
#7405 (ASCII [01 ] Переменная) 146
Основная программа
Подпрограмма
После вывода 500 для локальной переменной #1,
подпрограмма с номером. 3000 вызывается при помощи
типа макровызова G65.
Параметр
#7411 (ASCII [02] Действ./Недейств) 1 (Действ)
#7412 (ASCII [02] Код) A
#7413 (ASCII [02] Тип) 0 (G65 тип)
#7414 (ASCII [02] № программы) 3000
#7415 (ASCII [02] Переменная) 100 (Не используется)