Руководство по программированию токарного станка с системой ЧПУ MELDAS серии 60 Meldasmagic 64
Подождите немного. Документ загружается.

13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
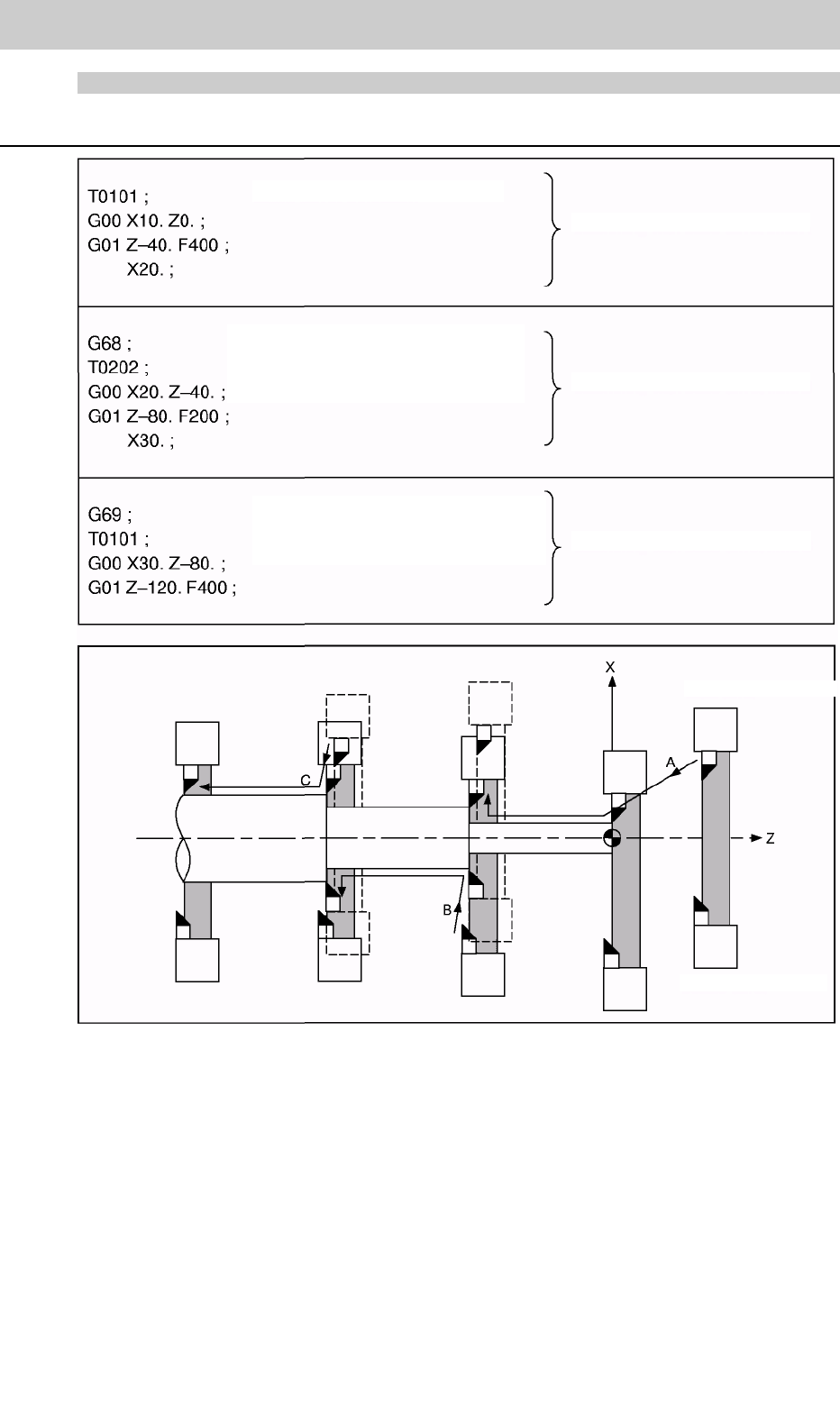
Пример программы и операции
422
Выбор основной рев. головки
Обработка осн. рев. головкойA
Зеркальное отображение двойной
рев. головки ВКЛ
Выбор двойной рев. головки
Обработка осн. рев. головкойB
Отмена зеркально отображения
двойной рев. головки
Выбо
р
основной
р
ев. головки
Обработка осн. рев. головкойC
Основная рев. головка
Двойная рев. головка
13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
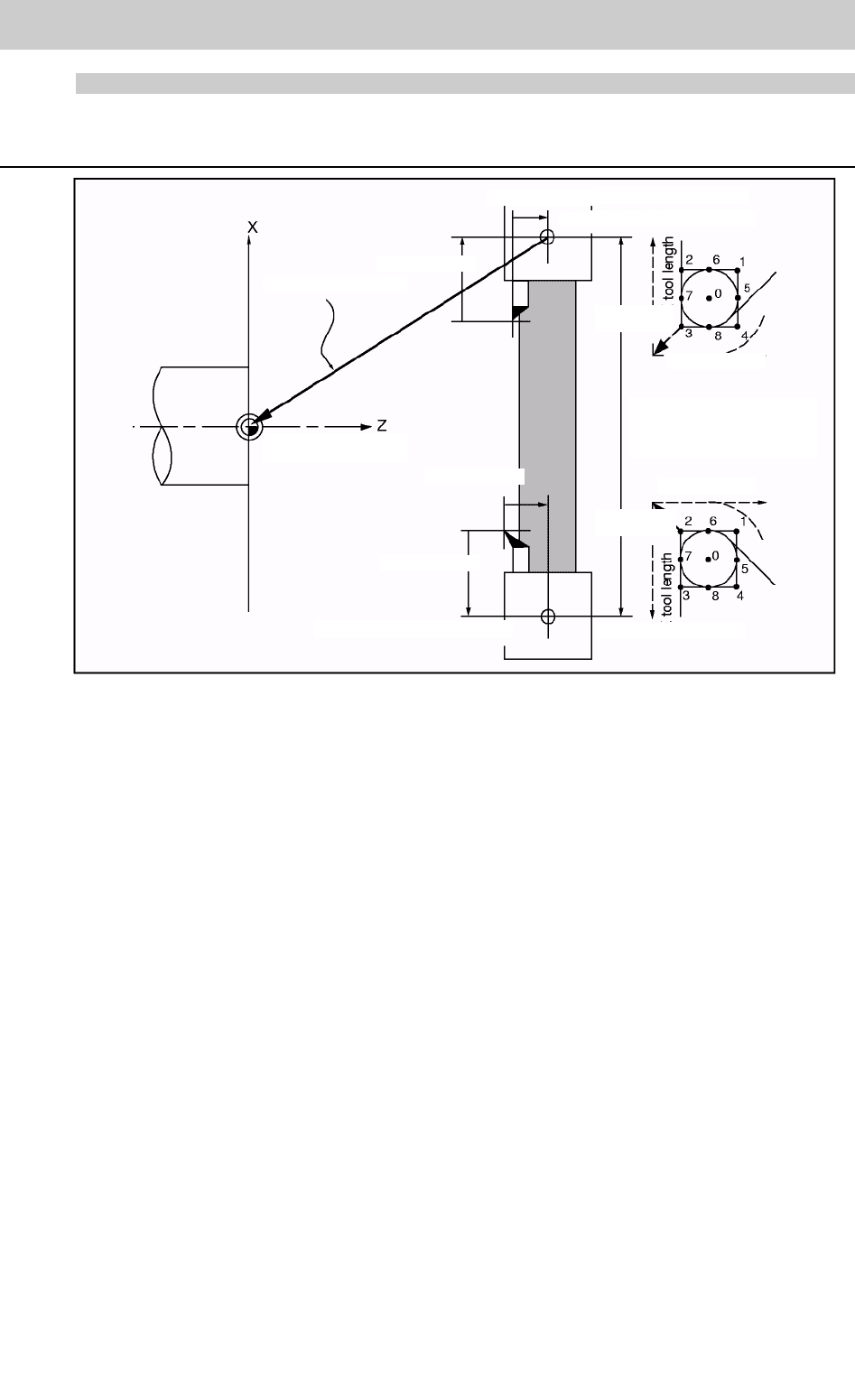
Коррекция резца двойной револьверной головки
Первичное направление резца для двойной револьверной головки показано на схеме.
Для задания резца двойной револьверной головки в том же направлении, что и резец
основной револьверной головки следует настроить параметр базовой спецификации "#1118
mirr_A" на значение "1".
423
Основная рев. головка
Длина резца Z
Исходная точка длины резца
Длина резца X
Смещение заготовки
Уровень
износа
Длина резца Z
Расстояние рев. головки
(параметр: значение
радиуса, только ось X)
Нулевая точка
коо
р
динат заготовки
Длина резца Z
Длина резца Z
Уровень
и
з
н
оса
Длина резца X
Исходная точка длины резца
Двойная рев. головка
13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
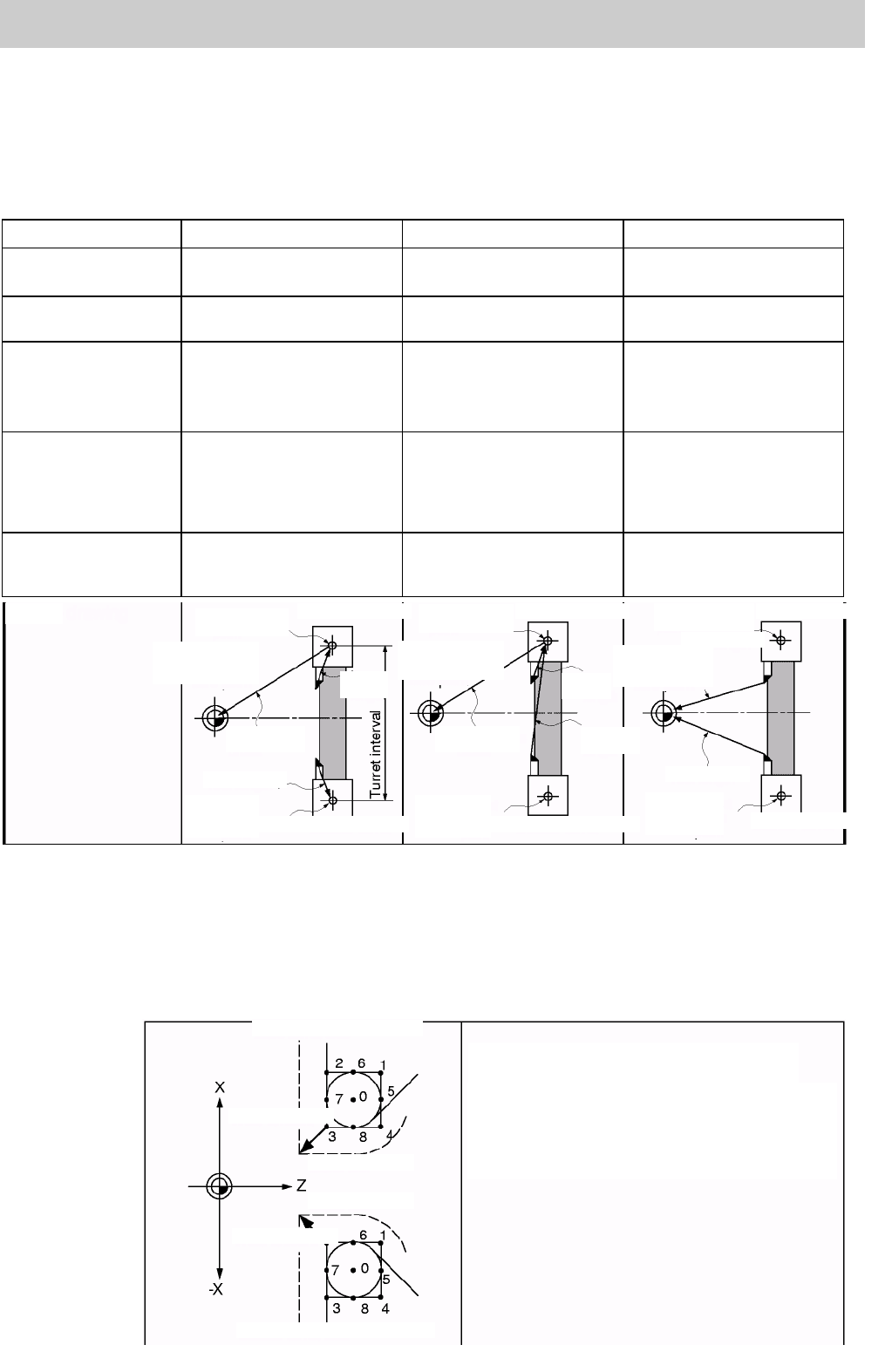
(1) Смещение по длине резца
Значением смещения длины резца является длина от вершины резца до исходной точки
длины резца. То же самое касается двойной револьверной головки. Следует учитывать,
что значение настройки уровня смещения различается в зависимости от положения
исходной точки длины резца, как показано ниже.
Основная точка длины резца и смещение по длине резца
Тип A Тип B Тип C
Исходная точка
длины резца
Исходная точка каждой
револьверной головки
Исходная точка основной
револьверной головки
Лицевой центр заготовки
Нулевая точка
координаты заготовки
Лицевой центр заготовки Лицевой центр заготовки Лицевой центр заготовки
Интервал
револьверной
головки
Расстояние между
исходными точками обеих
револьверных головок
(значение радиуса)
0 0
Смещение заготовки
Нулевая точка
координаты заготовки –
исходная точка длины
резца основной
р
евольве
р
ной головки
Нулевая точка
координаты заготовки –
исходная точка длины
резца основной
р
евольве
р
ной головки
0
Длина резца
Исходная точка длины
резца –позиция вершины
резца
Исходная точка длины
резца –позиция вершины
резца
Исходная точка длины
резца –позиция вершины
резца
Приведенные выше схемы демонстрируют пример, когда для #1118 mirr_A задано
значение 0. Если #1118 mirr_A задано значение 1, знак уровня смещения длины резца
оси Х для двойной револьверной головки изменится на обратный.
(2) Коррекция по износу вершины резца
Уровнем коррекции по износу вершины резца является длина от текущей вершины
резца до первичной вершины резца. Первичной вершиной резца является вершина
резца, для которой задано значение смещения по длине резца.
424
Схема
Осн. рев. головкаОсн. рев. головка Осн. рев. головка
Исх. точка
рев. головки
Исх. точка
рев. головки
Исх. точка
рев. головки
Длина резца
Нулевая точка
координаты
заготовки
Нулевая точка
координаты
заготовки
Нулевая точка
координаты
заготовки
(
Д
лина
резца
Д
лина
резца
Смещение
заготовки
Смещение
заготовки
Д
лина
резца
Длина резца
Длина резца
Исх. точка
рев.
головки
Исх. точка
рев.
головки
Исх. точка
рев.
головки
Двойная рев. головка
Двойная рев. головка Двойная рев. головка
Сторона осн. рев. головки
На схеме приведен пример, для
которого #1118 mirr_A равно 0.
Если для #1118 mirr_A задано значение 1,
знак уровня смещения длины резца оси Х
для двойной револьверной головки
изменится на обратный.
Уровень износа
Основной резец
Основной резец
Уровень износа
Сторона двойной рев. головки
13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
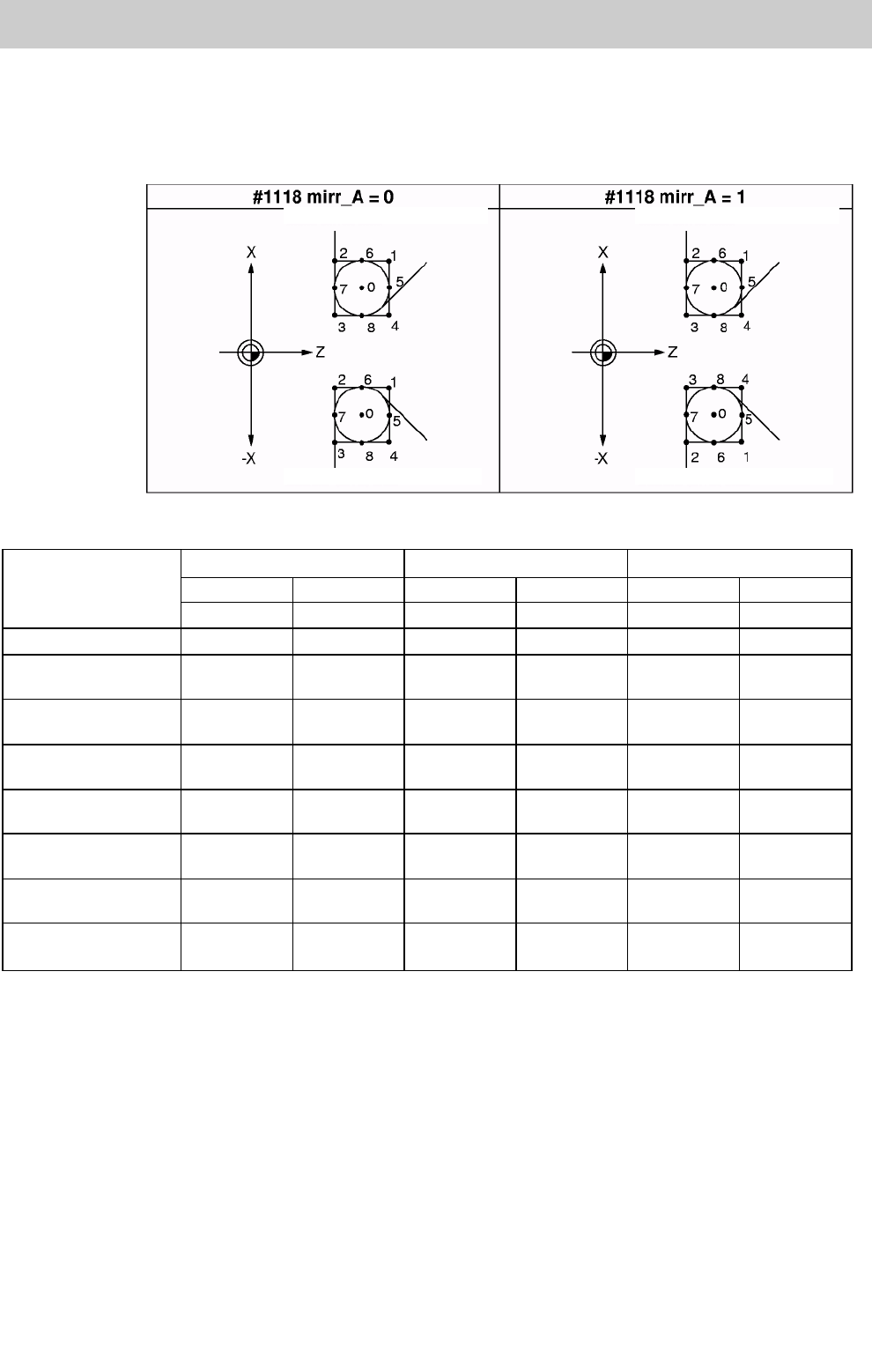
(3) Точка вершины резца с коррекцией вершины R
Точка вершины резца с коррекцией вершины R является следующей.
Следует учитывать, что если выбранная плоскость отличается от плоскости, заданной
при пуске зеркального отображения двойной револьверной головки, это будет
рассматриваться как #1118 mirr_A = 0, даже если #1118 mirr_A = 1.
(4) Примеры настройки коррекции резца
Тип A
Тип
B
Тип
C
mirr A = 0
mirr A = 1
mirr A = 0
mirr A = 1
mirr A = 0
mirr A = 1
X Z
X Z
X Z
X Z
X Z
X Z
Смещение заготовки
-100. -150. -100. -150. -100. -150. -100. -150. 0. 0. 0 0.
Интервал рев. головки
(Значение настройки)
100. 100.
0. 0. 0. 0.
Длина резца основной
рев. головки
40. 20. 40. 20. 40. 20. 40. 20. 40. 20. 40. 20.
Уровень износа резца
основной рев. головки
-4. -2. -4. -2. -4. -2. -4. -2. -4. -2. -4. -2.
Точка вершины
основной рев. головки
3 3 3 3 3 3
Длина резца двойной
рев. головки -30. 10. 30. 10. 170. 10. -170. 10. 70. -140. -70. -140.
Уровень износа двойной
рев. головки
2. -1. -2. -1. 2. -1. -2. -1. 2. -1. -2. -1.
Стык вершины
двойной рев. головки
2 3 2 3 2 3
425
Сторона основной рев. головки Сторона основной рев. головки
Сторона двойной рев. головки Сторона двойной рев. головки
13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
Меры предосторожности и ограничения
(1) Команда сбалансированной резки (G68, G69) не может задаваться, если опция
зеркального отображения двойной револьверной головки является действительной в
системе G кодировки 6, 7 (#1037 cmdtyp = 7, 8).
(2) Если зеркальное отображение двойной револьверной головки включено для оси в
системе, имеющей оси с переключением между ними при помощи комплексной
системы управления, либо в системе, в которую переносится осевое управление,
будет выдаваться "M01 операционная ошибка 1035".
Следует учитывать, что зеркальное отображение двойной револьверной головки может
быть активировано, после того, как произошло переключение осями при помощи
комплексного управления.
(4) Выдается программная ошибка (P486), если задана интерполяция полюсных
координат, цилиндрическая интерполяция или фрезерная интерполяция заданы при
включенном зеркальном отображении двойной револьверной головки.
(5) Выдается программная ошибка (P612), если включено зеркальное отображение
двойной револьверной головки при активном перемещении оси при помощи
интерполяции экспоненциальной функции.
(6) Выдается программная ошибка (P371), если ось, для которой задано зеркальное
отображение двойной револьверной головки, является ось вращения.
Связь с другими функциями
(1) Возврат к исходной точке (G28, G30)
Зеркальное отображение двойной револьверной головки остается действительным
при перемещении к промежуточной точке. Зеркальное отображение двойной
револьверной головки перестает действовать после прохода через промежуточную
точку, а также во время движения, игнорирующего промежуточную точку. Зеркальное
отображение двойной револьверной головки возобновляется со следующего блока.
(2) Выбор системы координат станка (G53)
Зеркальное отображение двойной револьверной головки перестает действовать во
время движения.
Зеркальное отображение двойной револьверной головки возобновляется со
следующего блока.
(3) Настройка системы координат (G92)
Следующие действия выполняются на оси, для которой действует зеркальное
отображение двойной револьверной головки.
Параметр
Подробное описание
0
Система координат "командное значение x (-1)" будет задана в
качестве системы координат со стороны двойной рев. головки.
#1273
ext09/bit3
1
Заданная система координат будет задана в качестве системы
координат со стороны двойной рев. головки.
(4) Считывание позиции координат при помощи переменных
Следующие действия выполняются на оси, для которой действует зеркальное
отображение двойной револьверной головки.
(a) Если предыдущий блок является системой координат конечной точки (#5001, и т.д.)
Производится считывание "значений координат конечной точки со стороны
основной револьверной головки в системе координат заготовки ".
(b) Для значений координат станка (#5021, и т.д.)
Производится считывание "значений координат со стороны основной
револьверной головки в системе координат станка ".
(c) Для значений координат станка (#5041, и т.д.)
Производится считывание "значения координаты заготовки в зеркальном
отображении двойной револьверной головки".
(d) Для значений координат пропуска (#5061, и т.д.)
Если зеркальное отображение двойной револьверной головки действует при
выполнении пропуска, производится считывание " значения координаты заготовки
в зеркальном отображении двойной револьверной головки ".
426

13. Вспомогательные программные функции
13.10 Зеркальное отображение двойной револьверной головки
(5) Сброс
(a) Если параметр #1210 RstGmd/bit14 = 0
Производится отмена зеркального отображения двойной револьверной головки
при выполнении сброса.
(b) Если параметр #1210 RstGmd/bit14 = 1
Состояние зеркального отображения двойной револьверной головки сохраняется
даже после выполнения сброса.
(6) Внешнее зеркальное отображение, параметрическое зеркальное отображение
(a) Выдается программная ошибка (P371), если зеркальное отображение двойной
револьверной головки применяется для оси во время внешнего зеркального
отображения или параметрического зеркального отображения.
(b) Выводится аварийный сигнал "M01 операционная ошибка 1036", если внешнее
зеркальное отображение или параметрическое зеркальное отображение
применяется к оси во время зеркального отображения двойной револьверной
головки.
(7) Ручное прерывание
(a) При ручном абсолютном выключении
Если ручное прерывание применяется для оси, для которой действует зеркальное
отображение двойной револьверной головки, зеркальное отображение не будет
применяться для уровня прерывания. Уровень ручного прерывания не будет
добавляться к значениям координат заготовки.
(b) При ручном абсолютном включении
Если ручное прерывание применяется для оси, для которой действует зеркальное
отображение двойной револьверной головки, зеркальное отображение не будет
применяться для уровня прерывания. Уровень ручного прерывания будет
добавляться к значениям координат заготовки.
427
13. Вспомогательные программные функции
13.11 Скашивание углов/закругление углов I
13.11 Скашивание углов/закругление углов I
Снятие фасок под любым углом либо закругление углов выполняется автоматически при
добавлении ",C_" or ",R_" на конце блока, задаваемого первым среди командных блоков,
отвечающих за обработку углов только при помощи линий.
При настройке параметров для снятия фасок может задаваться"l_", "K_", "C_" вместо ",C_", в
"R_" может задаваться для закругления вместо ",R_".
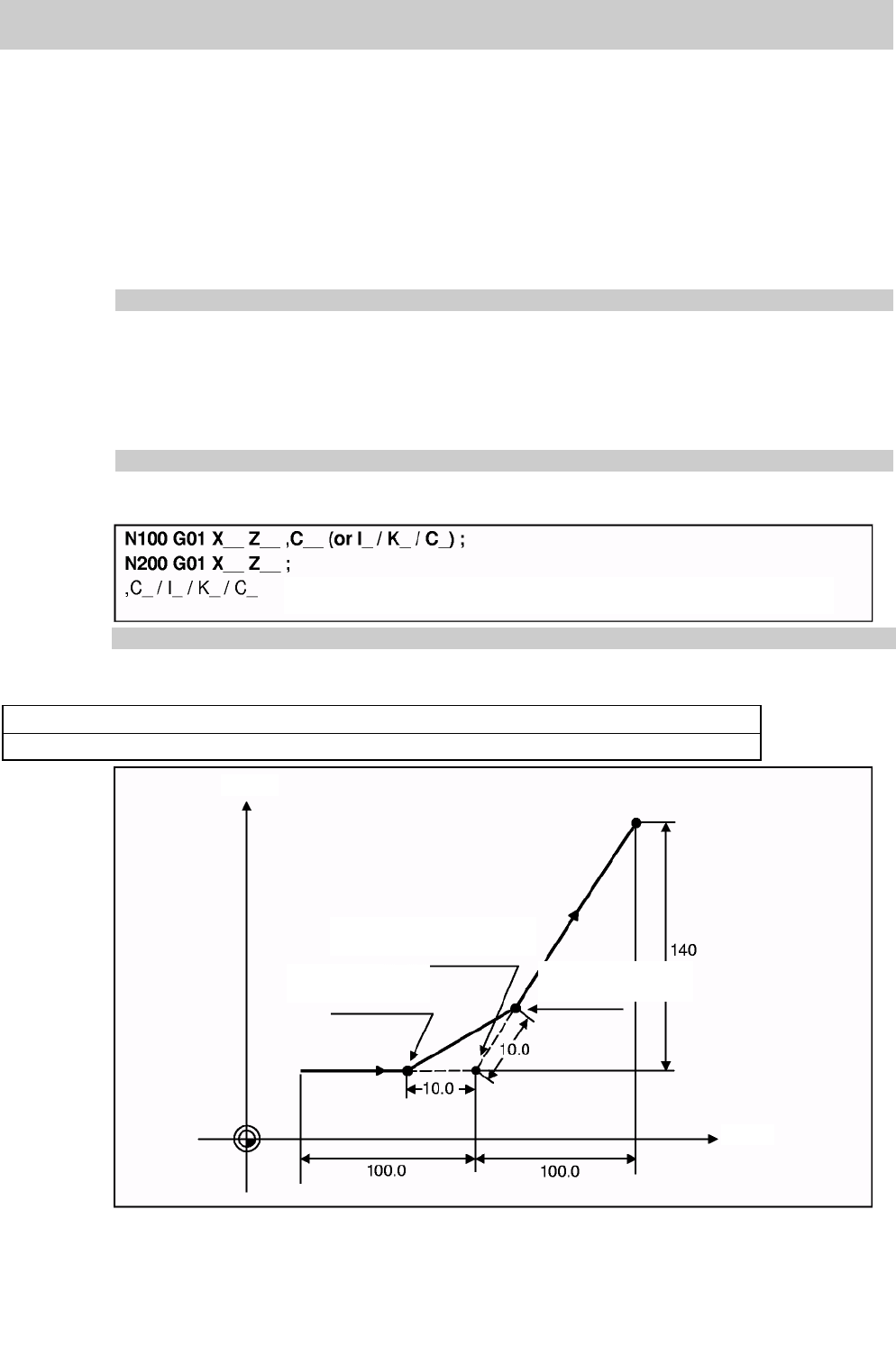
13.11.1 Скашивание углов ",C" (или "l_", "K_", "C_")
Функция и назначение
Угол скашивается таким образом, чтобы соединились позиции, получаемые при вычитании
значений длины, заданных при помощи ",C_" (или "l_", "K_", "C_") от условных начальных и
конечных углов, которые были бы действительны при отсутствии скашивания.
Формат команды
Снятие фасок производится в точке, в которой пересекаются N100 и N200.
Пример программы
G01 W100. ,C10. F100 ;
U280. W100. ;
428
Длина до начальной или конечной точки скашивания от
у
словного
у
гла
Ось X
Точка пересечения
у
словного
у
гла
Конечная точка
скашивания
Начальная точка
скашивания
Ось Z

13. Вспомогательные программные функции
13.11 Скашивание углов/закругление углов I
Подробное описание
(1) Начальная точка блока следующего после скашивания угла будет точкой пересечения
условного угла.
(2) Если значение параметра базовой спецификации "#1272 ext08/bit6" равно "0",
команда ",C" будет рассматриваться как команда C при отсутствии "," (запятой).
(3) Если в одном блоке присутствуют несколько различных или одинаковых команд
скашивания углов, действительной будет команда, заданная последней.
(4) Если в одном блоке задано скашивание углов и закругление углов, действительной
будет последняя команда.
(5) Смещение резца рассчитывается для формы, которая уже подвергалась скашиванию
углов.
(6) Если блок, следующий за командой скашивания углов, не содержит линейной
команды, активируется функция скашивания углов/закругления углов II.
(7) Выдается программная ошибка (P383), если уровень движения в блоке, задающем
скашивание углов, будет менее уровня скашивания.
(8) Выдается программная ошибка (P384), если уровень движения в блоке, следующем
за блоком, задающим скашивание углов, будет менее уровня скашивания.
(9) Выдается программная ошибка (P382), если команда движения не задана в блоке,
следующем за командой скашивания углов I.
(10) Если "C" используется в качестве названия оси или второй внесистемной функции,
скашивание углов не может задаваться при помощи "C".
(11) Скашивание углов не может задаваться при помощи "I" или "K" в дуговом командном
блоке. "I" и "K" являются командами центра дуги.
Меры предосторожности
(1) Скашивание углов и закругление углов могут задаваться при помощи "I", "K", "R", только
если 1-й блок команды скашивания углов/закругления углов является линейным.
(2) Скашивание углов при помощи "I", "K", и закругление углов при помощи "R" может
задаваться, если 1-й блок команды скашивания углов/закругления углов является
линейным, а второй блок является командой дуги. "I", "K" во 2-м блоке являются
командами центра дуги.
N100 G01 Xx Zz li;................li длина скашивания углов
N200 G02 Xx Zz li Kk ;...........li, Kk команда центра дуги
(3) Если ",C_", ",R_" или "l_", "K_", "C_", "R_" заданы в одном блоке, ",C_", ",R_" будут иметь
приоритет.
429
13. Вспомогательные программные функции
13.11 Скашивание углов/закругление углов I
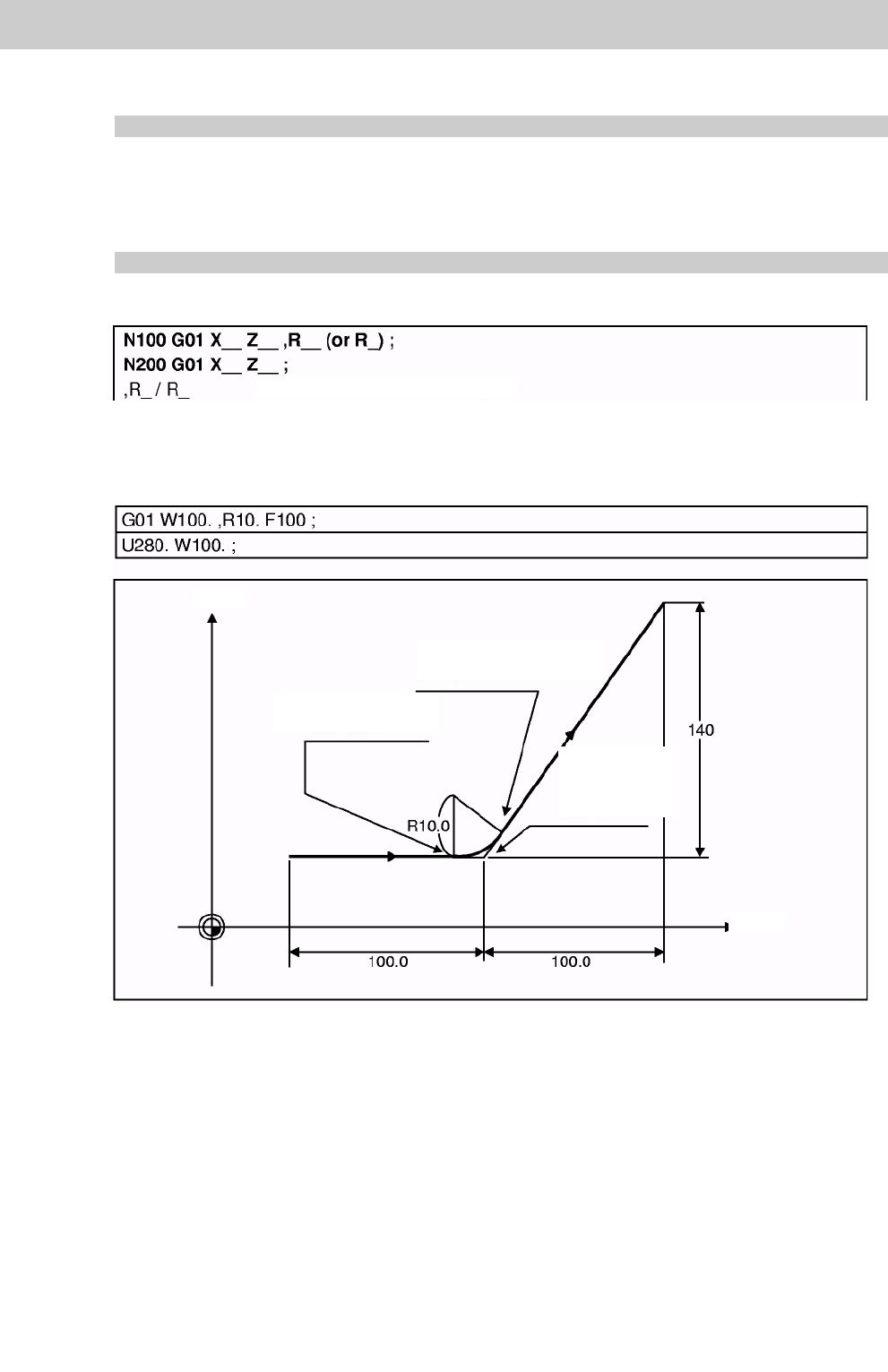
13.11.2 Закругление углов ",R_" (или "R_")
Функция и назначение
Закругление условных начальных и конечных углов, если углы не считаются
закругленными, выполняется по радиусу дуги, заданному в ",R_" (или "R_")
Формат команды
Закругление углов выполняется в точке пересечения N100 и N200.
Пример программы
430
Ради
у
с д
у
ги закр
у
гления
у
глов
Ось X
Конечная точка
зак
ру
гления
у
глов
Начальная точка
зак
ру
гления
у
глов
Точка
пересечения
условного
угла
•Ось Z

13. Вспомогательные программные функции
13.11 Скашивание углов/закругление углов I
Подробное описание
(1) Начальная точка блока следующего после закругления угла будет точкой пересечения
условного угла.
(2) Если значение параметра базовой спецификации "#1272 ext08/bit6" равно "0",
команда ",R" будет рассматриваться как команда R при отсутствии "," (запятой).
(3) Если в одном блоке задано скашивание углов и закругление углов, действительной
будет последняя команда.
(4) Смещение резца рассчитывается для формы, которая уже подвергалась закруглению
углов.
Если блок, следующий за командой закругления углов, не содержит линейной
команды, активируется функция скашивания углов/закругления углов II.
(6) Выдается программная ошибка (P383), если уровень движения в блоке, задающем
закругление углов, будет меньше значения R.
(7) Выдается программная ошибка (P384), если уровень движения в блоке, следующем
за блоком, задающим закругление углов, меньше значения R.
(8) Выдается программная ошибка (P382), если команда движения не задана в блоке,
следующем за командой закругления углов.
(9) Закругление углов не может задаваться при помощи "R" в дуговом командном блоке.
"R" является командой радиуса дуги.
Меры предосторожности
(1) Скашивание углов и закругление углов могут задаваться при помощи "I", "K", "R", только
если 1-й блок команды скашивания углов/закругления углов является линейным.
(2) Скашивание углов при помощи "I", "K", и закругление углов при помощи "R" может
задаваться, если 1-й блок команды скашивания углов/закругления углов является
линейным, а второй блок является командой дуги. "I", "K" во 2-м блоке являются
командами центра дуги.
N100 G01 Xx Zz li;................li длина скашивания углов
N200 G02 Xx Zz li Kk ;...........li, Kk команда центра дуги
(3) Если ",C_", ",R_" или "l_", "K_", "C_", "R_" заданы в одном блоке, ",C_", ",R_" будут иметь
приоритет.
431