Поляков А.А., Кольцов В.М. Расчет статически неопределимых систем методом сил
Подождите немного. Документ загружается.


Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 41 из 58
стр. 41 из 58
Таким образом,
11
1;
i
NX==
21 31
0,577NN==− (знак минус указыва-
ет на деформацию сжатия).
5.17. Определяем значение коэффициента канонического уравнения
по формуле (5.1):
()() ()()
11 11 21 21 31 31
123
11
12 3
11
0,577 0,577 1,154 0,577 0,577 1,154
1, 768 .
NN NN NN
EA EA EA EA
EA EA
E
A
δ
⋅⋅ ⋅⋅ ⋅⋅ ⋅⋅
=+ + =+
−⋅−⋅ −⋅−⋅
++=
=
llll
ll
l
5.18. Записываем каноническое уравнение:
1
1,768 .X
E
A
⋅
=∆
l
5.19. Решаем уравнение и находим неизвестное усилие:
1
0,566 .
1, 768
EA EA
X
∆
⋅
== ⋅∆
⋅ll
5.20. Определяем действительные значения усилий в упругих стерж-
нях заданной системы по формуле (5.2):
11
11
10,566 0,566 ;
EA EA
NNX=⋅=⋅ ⋅∆= ⋅∆
ll
21
21
0,577 0,566 0,327 ;
EA EA
NNX=⋅=− ⋅ ⋅∆=− ⋅∆
ll
31
31
0,577 0,566 0,327 .
EA EA
NNX=⋅=− ⋅ ⋅∆=− ⋅∆
ll
5.21. Выполняем деформационную проверку по формуле (5.4):
11 21 31
11 2 2 3 3
12 3
,
NN NN NN
EA EA EA
⋅⋅ ⋅⋅ ⋅⋅
+
+=∆
lll
(5.4)
где
11
1;N =
21 31
0,577;NN==−
1
;
=
ll
23
1,154 ;
=
=ll l const.
E
A
=
Тогда
()
()
0,577 0,327
10,566
0,577 0,327
0,95 .
EA
EA
EA EA
EA
E
A
⎛⎞
−⋅− ⋅∆⋅
⋅⋅∆⋅
⎜⎟
⎝⎠
++
⎛⎞
−⋅− ⋅∆⋅
⎜⎟
⎝⎠
+=∆
l
l
l
l
l
l
0,95 .⋅∆≠∆

Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 42 из 58
стр. 42 из 58
Погрешность счета составляет
10,95
100 5%,
1
−
⋅= что допустимо.
5.22. Выполняем проверку на статическое равновесие вырезанного узла
С (рис. 5.10):
Рис. 5.10
()
12
0 : cos30 0,566 0,327 0,866
0,327 0,866 0,566 0,566 0.
EA EA
YNN
EA EA
=−⋅ = ⋅∆− ⋅∆⋅−
−⋅∆⋅=−⋅=
∑
o
ll
ll
Ус л о ви е равновесия выполняется.
Примечание. При наличии внешней узловой нагрузки дополнительно определяем
усилия в стержнях ,
iP
N вычисляем грузовой коэффициент ,
iP
∆
а каноническое уравнение
принимает вид:
11 1 1
.
P
X
δ
⋅
+∆ =∆ (5.5)
Пример 3.
Усилия в элементах статически неопределимой стержневой системы
могут возникать при отсутствии внешней нагрузки и от изменения темпе-
ратуры окружающей среды (так называемые температурные напряжения).
Рассмотрим стержень, составленный из разнородных материалов и же-
стко защемленный по торцам (рис. 5.11).
Рис. 5.11
Размеры стержня:
Длина:
ст
0,4 м;=l
алюм
0,8 м.=l
Площадь поперечного сечения:
32
ст
210 мм ;A =⋅
32
алюм
410 мм .A =⋅
Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 43 из 58
стр. 43 из 58
Коэффициент продольной упругости:
52
ст
210 Н / мм ;E =⋅
52
алюм
0,7 10 Н / мм .E =⋅
Коэффициент линейного расширения:
6
ст
15 10 ;
−
α= ⋅
6
алюм
25 10 .
−
α=⋅
Требуется найти усилия, возникающие в стержнях при положитель-
ном температурном градиенте 20 Ct∆=
o
.
Решение.
5.23. Задача 1 раз статически неопределима.
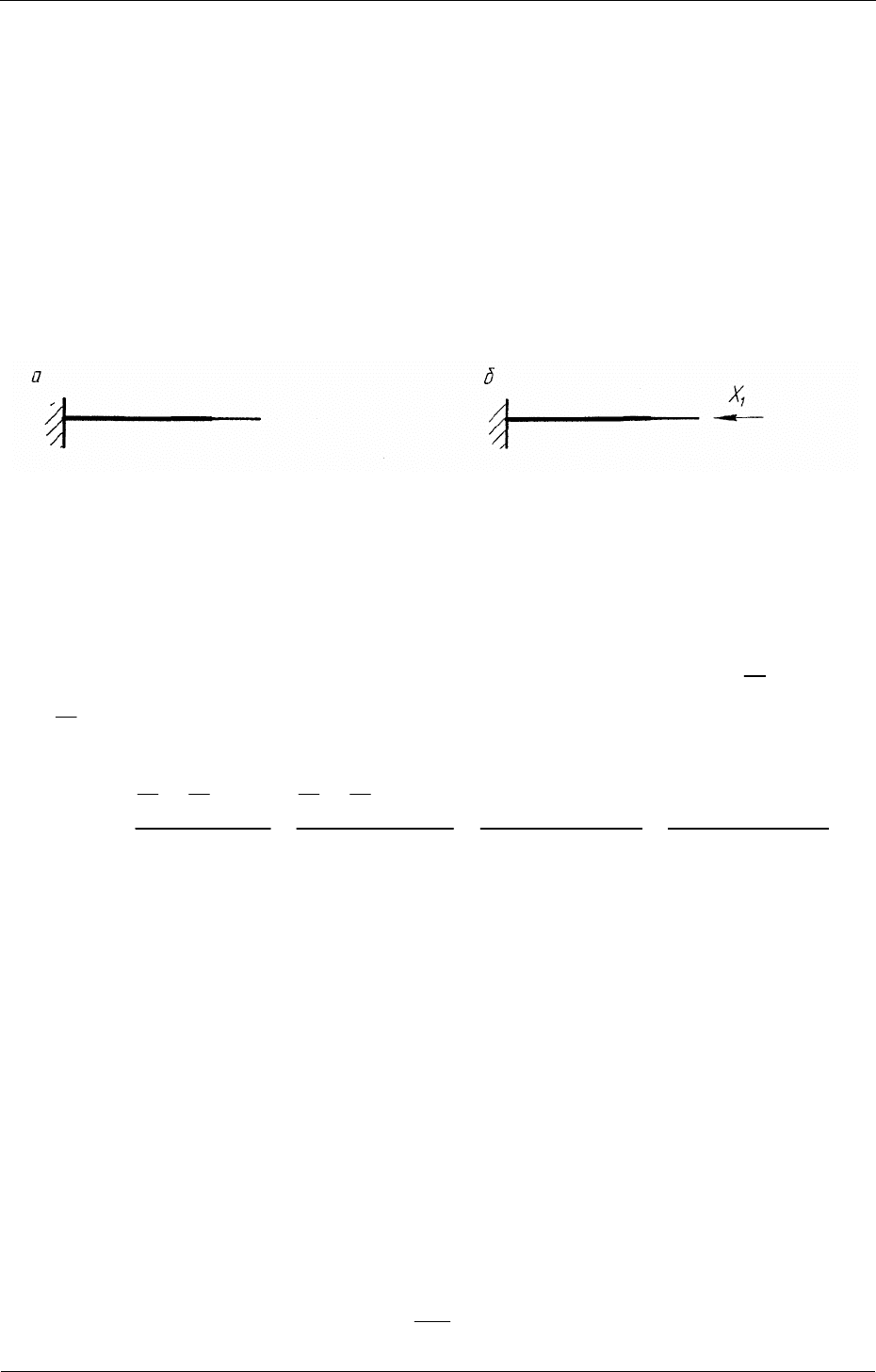
5.24. Преобразуем заданную систему в основную путем отбрасывания
одной внешней связи (рис. 5.12, а).
Рис. 5.12
5.25. Образуем эквивалентную систему. Для этого нагружаем основ-
ную систему усилием отброшенной связи Х
1
(рис. 5.12, б).
5.26. Записываем каноническое уравнение метода сил:
11 1 1
0.
t
X
δ
⋅+∆=
5.27. Нагружаем основную систему единичным усилием
1
1.X =
То-
гда
11
1.N =−
5.28. Вычисляем коэффициент канонического уравнения:
(
)
(
)
(
)
(
)
11 11 11 11
ст алюм
11
53 53
ст алюм
6
11400 11800
210210 0,710410
3,86 10 мм / Н.
NN NN
EA EA
δ
−
−⋅−⋅ −⋅−⋅
⋅⋅ ⋅⋅
=+ = + =
⋅⋅⋅ ⋅⋅⋅
=⋅
ll
5.29. Определяем деформацию стержня от воздействия положитель-
ного значения температурного градиента 20 C.t∆=
o
66
1 ст ст алюм алюм
6
15 10 0,4 20 25 10 0,8 20
520 10 м 0,52 мм.
t
tt
−−
−
∆=α⋅ ⋅∆+α ⋅ ⋅∆= ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ =
=⋅ =
ll
5.30. Записываем каноническое уравнение метода сил:
6
1
3,86 10 0,52 0.X
−
⋅⋅− =
5.31. Решаем уравнение и находим неизвестное усилие:
6
1
0,134 10 Н.X =⋅
5.32. Выполняем проверку правильности решения задачи по формуле (5.6):
1t
i
N
EA
⎛⎞
=
∆
⎜⎟
⎝⎠
∑
l
. (5.6)

Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 44 из 58
стр. 44 из 58
6
53
ст алюм
6
53
0,134 10 400
210 210
0,134 10 800
0,516 мм.
0,7 10 4 10
i
NN N
EA EA EA
⋅⋅
⎛⎞ ⎛⎞ ⎛⎞
=+ = +
⎜⎟ ⎜⎟ ⎜⎟
⋅⋅⋅
⎝⎠ ⎝⎠ ⎝⎠
⋅⋅
+=
⋅⋅⋅
∑∑ ∑
ll l
0,516 0,510,≠
погрешность счета составляет
0,516 0,510
100 3%,
0,516
−
⋅=
что допустимо
6. Расчет статически неопределимых стержневых систем
методом сил в матричной форме
6.1. Матричная форма определения перемещений в стержневых сис-
темах При определении перемещений в балках и рамах (без учета про-
дольных и поперечных сил) интеграл Мора записывается в виде
1
0
,
k
m
i
P
iP
k
k
MM
dx
EI
=
⋅
∆=
∑
∫
l
где
k
E
I ,
k
l – жесткость сечения при изгибе и длина k-го участка соответ-
ственно;
m – число участков системы.
Вычислим интеграл Мора для k-гo участка по формуле Симпсона,
полагая жесткость сечения
k
E
I
постоянной, а подынтегральные
P
M
и
i
M
функции непрерывными и в сумме не выше третьего порядка.
В этом случае получаем точное значение интеграла Мора:
0
4,
6
k
acв
i
acв
Pk
ki ki ki
kP kP kP
kk
MM
dx MM MM MM
EI EI
⋅
=⋅⋅+⋅+⋅
∫
l
l
(6.2)
где ,
a
M
,
в
M
с
M
– ординаты эпюр моментов в расчетных сечениях (в на-
чале, конце и посередине) участка (рис. 6.1).
Представим правую часть выражения (6.2) в виде произведения трех
матриц:
0
100
040
6
001
k
a
kP
acв
i
c
Pk
ki ki ki
kP
kk
в
kP
M
MM
dxMMM M
EI EI
M
⋅
=++⋅⋅ ⋅
∫
l
l
(6.3)
или сокращенно:
0
,
k
T
i
P
ki kP
k
k
MM
dx M B M
EI
⋅
=⋅⋅
∫
l
u
ur
(6.4)

Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 45 из 58
стр. 45 из 58
где
Tacв
ki ki ki ki
MMMM=++ – матрица-строка (транспонированный стол-
бец), состоящая из ординат единичной эпюры моментов на k-м участке от
силы
1
i
P =
;
100
040
6
001
k
k
k
B
EI
=⋅
l
– матрица податливости k-го участка;
acв
kP
kP kP kP
M MMM=⋅⋅
uur
– матрица-столбец (вектор), состоящий из ор-
динат эпюры моментов на k-м участке от нагрузки Р.
Рис. 6.1
Для получения полного перемещения
iP
∆
просуммируем интеграл Мо-
ра в матричной форме на всех m участках системы:
(
)
1
1
2
2
12
1
0
...
0
P
m
TTTT
P
ki kP i i mi
iP k
k
m
mP
M
B
B
M
MBM MM M
B
M
=
∆= ⋅ ⋅ = ⋅ ⋅⋅ ⋅ ⋅
∑
uur
uur
uur
O
M
uur
(6.5)
или сокращенно:
1
,
T
iP
P
M
BM∆= ⋅⋅
u
ur
(6.6)
где
T
i
M
– матрица-строка (транспонированный столбец), состоящая из ор-
динат единичной эпюры моментов
T
i
M
в расчетных сечениях системы от
силы
1
i
P =
.
Расчетные сечения системы представляют собой совокупность рас-
четных сечений всех участков, занумерованных по порядку;
B
– квазидиагональная матрица податливости системы, состоящая из
матриц податливости отдельных участков
k
B
;
Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 46 из 58
стр. 46 из 58
P
M
uur
– матрица-столбец (вектор), состоящая из ординат эпюры момен-
тов
P
M
в расчетных сечениях системы от нагрузки P .
Формулой (6.6) определяется одно перемещение какой-либо точки по
направлению
i от нагрузки P .
Для вычисления полного вектора перемещений
P
∆
u
r
, состоящего из
совокупности перемещений
1
P
∆
,
2
P
∆
, …,
nP
∆
нужно в формуле (6.6) вме-
сто одной строки
T
i
M
записать все n строк матриц
1
T
M
,
2
T
M
, …,
T
n
M
.
Тогда получим:
1
1
2
2
3
....................
T
P
P
T
P
P
P
T
P
nP
MBM
MBM
MBM
⋅⋅
∆
∆
⋅⋅
∆= = =
∆
⋅⋅
u
ur
uur
ur
M
uur
11 21 1
1
1
2
12 22 2
2
12
...
0
...
...............................
0
...
TT T
m
P
TT T
P
m
TT T
m
nP
nn mn
MM M
M
B
B
M
MM M
B
M
MM M
⋅⋅⋅
⋅⋅⋅
=⋅⋅
⋅⋅⋅
uur
uur
O
M
uur
(6.7)
или сокращенно:
.
T
P
P
M
BM
∆
=⋅⋅
u
ruur
(6.8)
Перемещения в формах (с учетом постоянных продольных сил N и
жесткостей сечения стержней
k
E
A в пределах участков) определяются по
формуле:
1
.
m
i
P
iP k
k
k
NN
EA
=
⋅
∆
=⋅
∑
l (6.9)
По аналогии с (6.6) формула (6.9) в матричной форме записывается так:
1
1
1
2
2
12
2
0
...
P
P
ii mi
iP
mP
m
m
EA
N
N
EA
NN N
N
EA
∆= ⋅ ⋅⋅ ⋅ ⋅
l
l
M
O
l
(6.10)
или сокращенно:
1
,
T
iP
PN
NBN∆= ⋅ ⋅
u
ur
(6.11)
Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 47 из 58
стр. 47 из 58
где
T
i
N – матрица-строка (транспонированный столбец), состоящая из вели-
чин продольных сил в элементах формы от силы
1
i
P
=
;
N
B
– диагональная матрица податливости системы;
P
N
uur
– матрица-столбец (вектор), состоящая из продольных сил в элементах
формы от нагрузки P .
6.2. Матричная форма расчета статически неопределимых систем ме-
тодом сил.
При расчете статически неопределимых стержневых систем, имею-
щих большую степень статической неопределимости и значительное число
участков нагружения, целесообразно перейти к матричной форме записи
канонических уравнений метода
сил. Такой переход позволяет не только
формализовать процесс построения эпюр внутренних силовых факторов,
но и эффективно использовать вычислительные машины.
Канонические уравнения метода сил, записанные в форме:
11 1 12 2 1 1
21 1 22 2 2 2
11 2 2
... 0;
... 0;
.........................................................
.........................................................
... 0,
nn P
nn P
nn nnnnP
XX X
XX X
XX X
δ+δ ++δ +∆=
δ+δ ++δ +∆=
δ+δ ++δ +∆=
можно представить в форме:
11 12 1
11
21 22 2
22
12
...
...
................. 0
.................
...
n
P
n
P
nnP
nn nn
X
X
X
δδ δ
δδ δ
δδ δ
∆
∆
⋅
+=
∆
MM
(6.12)
или в компактной форме записи:
0,
P
X
∆
⋅+∆=
u
urur
(6.13)
где
∆ – матрица единичных перемещений в основной системе;
X
uur
– вектор лишних неизвестных;
P
∆
ur
– вектор перемещений в основной системе от нагрузки P ;
11 12 1
21 22 2
12
...
...
;
.................
...
n
n
nn nn
δδ δ
δδ δ
δ
δδ
∆=
1
2
;
n
X
X
X
X
=
uur
M
1
2
.
P
P
P
nP
∆
∆
∆=
∆
ur
M

Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 48 из 58
стр. 48 из 58
Перемещения сечений для балок и рам определяются по формуле
(6.8). Для определения элементов матрицы
∆
воспользуемся той же фор-
мулой (6.8). Подставив в эту формулу вместо вектора
P
M
u
ur
вектор
1
M
uur
, со-
стоящий из ординат первой единичной эпюры моментов
1
M
, плоучим пер-
вый столбец матрицы
∆ :
11
21
1
.
.....
T
n
M
BM
δ
δ
δ
=
⋅⋅
u
ur
(6.14)
Аналогично подстановкой в (6.8) векторов
2
M
u
ur
,
3
M
u
ur
, …,
n
M
uur
получим
последующие столбцы матрицы
∆
, т. е.:
12
...
TT T
n
MBMMBM MBM
∆
= ⋅⋅ ⋅ ⋅⋅ ⋅⋅ ⋅⋅ =
u
ur u ur u ur
111 21
212 22
12
...
...
..................................................................
...
TT T
n
TT T
n
TT T
nn nn
MBMMBM MBM
MBMMBM MBM
MBMMBM MBM
⋅⋅⋅⋅⋅⋅⋅⋅⋅
⋅⋅⋅⋅⋅⋅⋅⋅⋅
=
⋅⋅⋅⋅⋅⋅⋅⋅⋅
u
ur u ur u ur
u
ur u ur u ur
u
ur u ur u ur
(6.15)
Или сокращенно:
.
T
M
BM
∆
=⋅⋅
u
ur
(6.16)
Решение уравнения (6.12) представляется в виде:
1
,
P
X
−
=
∆⋅∆
u
urur
(6.17)
где
1−
∆ – обратная матрица.
После подстановки выражений
P
∆
u
r
из (6.8) и
∆
(6.16) в уравнение
(6.17) получим вектор неизвестных:
(
)
1
.
TT
P
XMBMMBM
−
=− ⋅ ⋅ ⋅ ⋅ ⋅
uuruuruur
(6.18)
Действительные значения изгибающих моментов в заданной системе
определяются по матричной формуле:
P
M
MMX
=
+⋅
u
ur u ur u ur
(6.19)
или после подстановки выражения X
u
ur
из (6.18) окончательно получим:
(
)
1
TT
P
P
M
MMMBM MBM
−
=+⋅ ⋅⋅ ⋅⋅⋅
u
ur u ur u ur u ur
(6.20)
Деформационная проверка правильности расчета выполняется по
формуле:
0.
T
i
M
BM
⋅
⋅=
u
ur
(6.21)

Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 49 из 58
стр. 49 из 58
Пример.
Рис. 6.2
Для рамы, представленной на рис. 6.2 построить эпюры ,
M
,Q .N
Исходные данные: 30q = кН/м, 60P
=
кН, const.
E
I
=
Решение.
1. Ус т а н ав ли ва е м степень статической неопределимости по формуле:
3 Ш,nX=−−
где 6X = (наличие внешних связей);
Ш 1= (один одиночный шарнир).
Тогда 6312.n =−−=
2. Образуем основную систему путем рассечения ригеля по шарниру
(рис. 6.3, а).
Рис. 6.3
3. Образуем эквивалентную систему путем нагружения основной сис-
темы усилиями отброшенных связей
1
,X
2
X и внешней нагрузкой
P
и q
(рис. 6.3, б).
4. Записываем каноническое уравнение метода сил:
0.
P
X∆⋅ +∆ =
uurur
Поляков А.А., Кольцов В.М.
Расчет статически неопределимых
стержневых систем методом сил
ГОУ ВПО УГТУ-УПИ – 2006
стр. 50 из 58
стр. 50 из 58
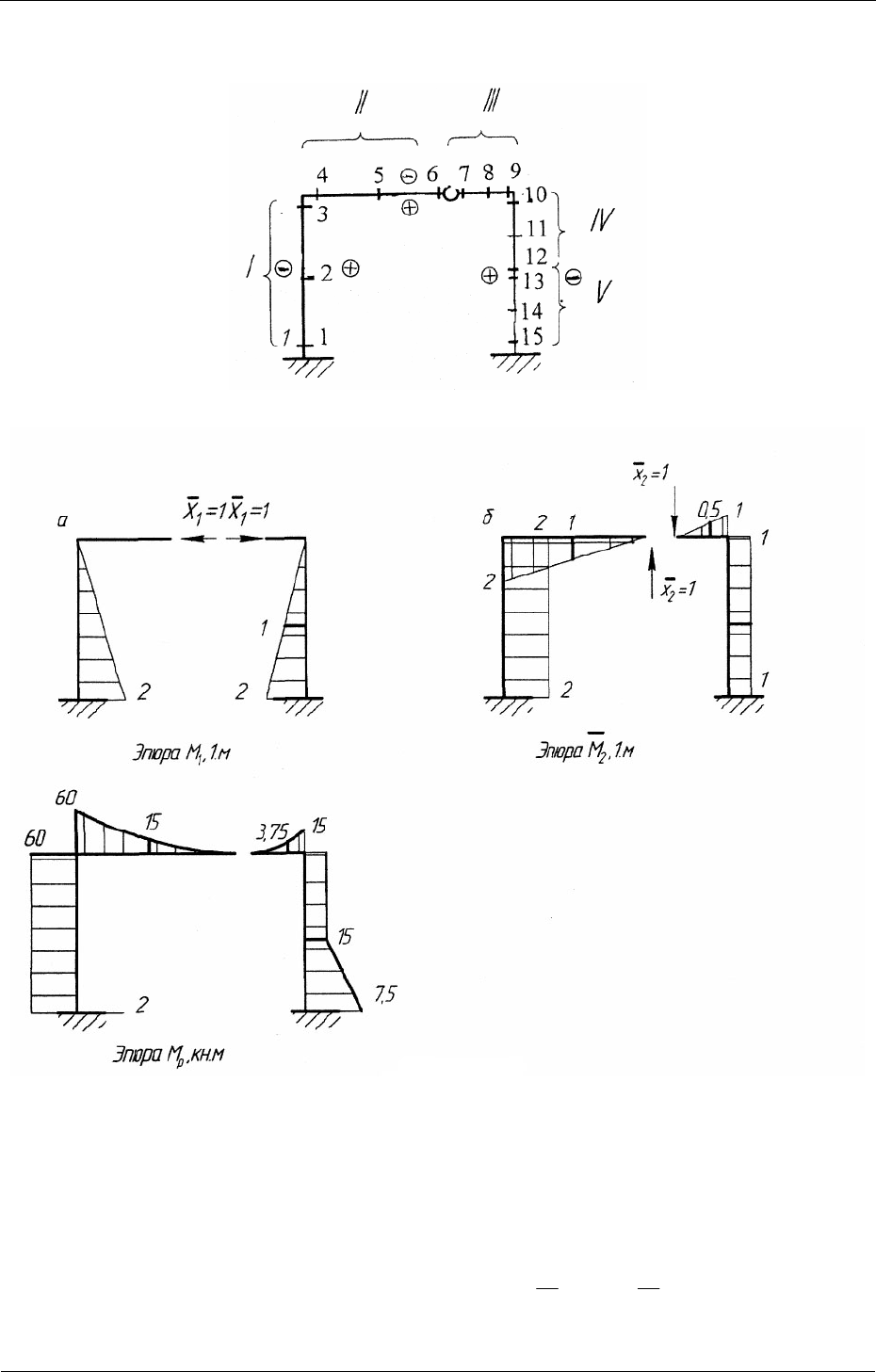
5. Намечаем и нумеруем участки и сечения, а также знаки моментов,
исходя из положения точки наблюдателя (рис. 6.4).
Рис. 6.4
Рис. 6.5
В рассматриваемом примере принимаем, что положение точки наблю-
дателя расположено внутри контура, поэтому за положительные значения
моментов принимаем моменты, которые вызывают в расчетном сечении рас-
тяжение внутренних волокон.
6. Строим эпюры изгибающих моментов для основной системы от дей-
ствия единичных усилий отброшенных связей
1
1X
=
и
2
1X = и от внешней
нагрузки P и q (рис. 6.5).