Пильов В.О., Шеховцов А.Ф. Двигуни внутрішнього згоряння: Серія підручників. Том 4. Основи САПР ДВЗ
Подождите немного. Документ загружается.

Р
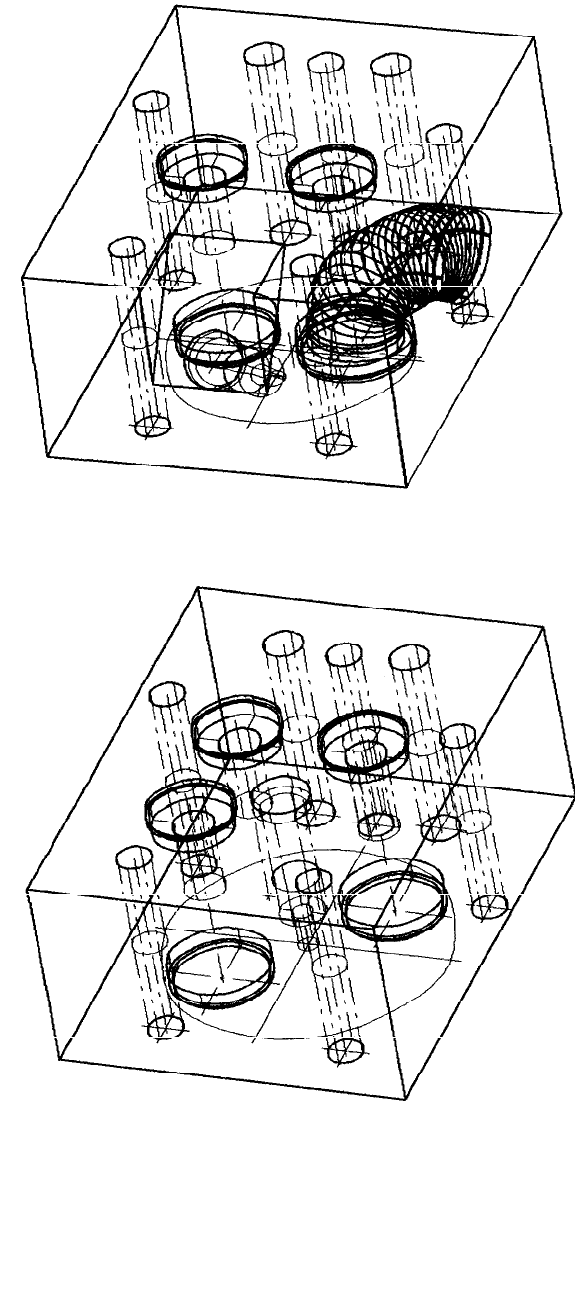
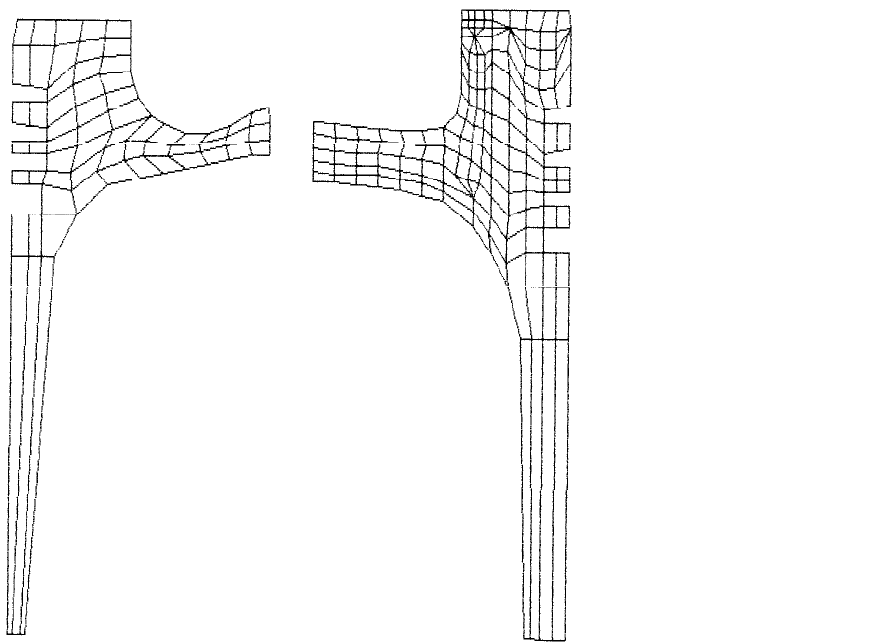
исунок 7.15 – Варіанти моделей головок циліндр
на рі
а – двоклапанної; б – чотириклапанної
ів
зних етапах їх синтезу (НТУ “ХПІ”):
а
б
330
моделі в певній графічній системі. Надалі ця інформація опрацьовується
спеціально створеним єдиним спецпроцесором – сітковим генератором.
Такі спецпроцесори функціонують безпосередньо в середовищі графічної
системи або поза її межами. При цьому програмний комплекс стає інваріа-
нтним до типу конструкції деталі. Приклади синтезу сіткових моделей
об’єкта проектування за допомогою сіткових генераторів було розглянуто
на рис.3.63; 3.64, б.
Ефект від використання другого методу зменшується в разі прове-
дення конструктивної оптимізації, тобто тоді, коли виникає необхідність в
багаторазовій перебудові вихідної інформації при зміні геометричних гра-
ничних умов. У даному випадку для підвищення ефективності САПР від-
повідно до рис.7.16 можна скористатись багаторівневим лінгвістичним за-
безпеченням.
ана
програма САПР
ДВЗ
Спеціалізов
Значення вектора
конструктивних
параметрів деталі
x
(внутрішня мова роз-
рахункового
блоку САПР)
Спеціалізований
конвертор
Геометрична
модель деталі
(проміжна мова графі-
чної підсистеми)
Графічна
підсистема
Внутрішня
мова графічної
підсистеми
Сітковий
генератор
Сіткова
топологічна
модель деталі
До інваріантної
підсистеми аналізу
об’єктів проектування
4
3
2
1
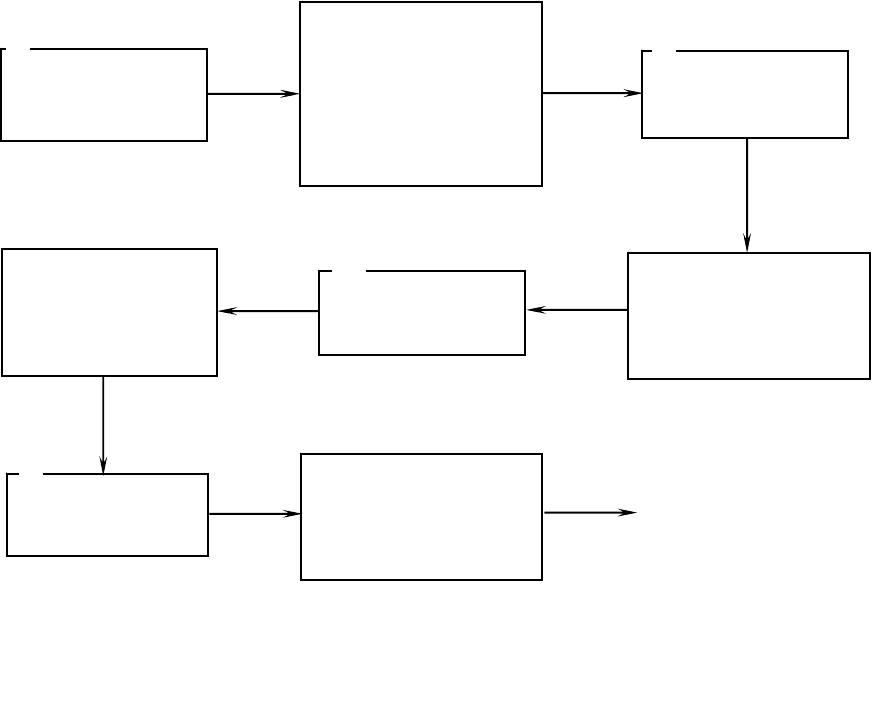
Р
исунок 7.16 – Схема автоматизованої побудови сіткової
моделі об’єкту проектування
З цього рисунку видно, що значення вектора конструктивних пара-
метрів
x
об’єкта проектування визначається в спеціалізованій програмі
331
(блок 1). Надалі ця інформація обробляється спеціалізованим конвертором
(блок 2). Його структура відповідає схемі рис.7.3. Створена тут геометрич-
на модель передається до системи машинної графіки (блок 3), де подається
мовою, зрозумілою сітковому генератору. Тоді універсальний сітковий ге-
нератор (блок 4) на основі отриманої інформації генерує сіткову модель
об’єкта проектування. Остання використовується в інваріантній
підсистемі
аналізу. Тут важливо, що для виконання процедур синтезу й аналізу певної
деталі потребує розробки тільки конвертор блока 2 за рис.7.16. З його до-
помогою здійснюється лише генерація нарисно-графічної інформації, що
було розглянуто раніше.
Звернемо увагу також на те, що відповідно до схеми рис.7.16 можли-
во виконання геометричної моделі оригінальної
деталі безпосередньо в си-
стемі машинної графіки (блок 3), тобто минаючі блоки 1 і 2 автоматизова-
ного синтезу типових конструкцій. Тепер зрозуміло, що за допомогою уні-
версального сіткового генератора може бути утворено сіткову модель ори-
гінальної деталі. В останньому випадку потрібним є використання інтерак-
тивного режиму роботи графічного редактора.
Третій підхід дозволяє формувати сіткову
модель деталей складної
геометричної форми при довільному варіюванні її геометричними і фізич-
ними характеристиками. В основу методу закладено табличний спосіб вве-
дення даних. Це дозволяє формувати сіткові моделі оригінальних деталей
навіть минаючи процедуру будови геометричної моделі в системі машин-
ної графіки. Можливість багаторазової перебудови моделі об’єкта проек-
тування тут
реалізовано за рахунок коригування його інформаційної гео-
метричної моделі.
Вказана модель потребує наявності трьох систем координат. Перша
з них, декартова система
OX
1
Y
1
Z
1
, є основною і служить для визначення
фізичних координат вузлових точок сіткової моделі, що розробляється.
Друга,
OX
2
Y
2
Z
2
, сіткова прямокутна система, призначена для задання сіт-
кових координат базових вузлів. Тут під сітковою координатою розумієть-
ся порядковий номер розглянутого вузла уздовж відповідної осі сіткової
системи, а базовими вузлами є ті, на основі яких надалі будується вся мо-
дель.
Базові вузли кожного перетину деталі встановлюються користувачем
системи і подаються їм
у координатах x
1
y
1
z
1
і x
2
y
2
; координата z
2
при цьому
332
визначає порядковий номер розглянутого перетину в загальній нумерації
всіх перетинів.
Через велику різноманітність створюваних на практиці перетинів пе-
редбачають присвоєння єдиної фізичної координати різним базовим вуз-
лам у системі
OX
2
Y
2
Z
2
. При цьому відбиток системи OX
2
Y
2
Z
2
у системі
OX
1
Y
1
Z
1
у загальному випадку буде являти собою криволінійну сітку нере-
гулярної структури. Це дозволяє вносити в модель відомості про конфігу-
рацію деталей практично будь-якої складності.
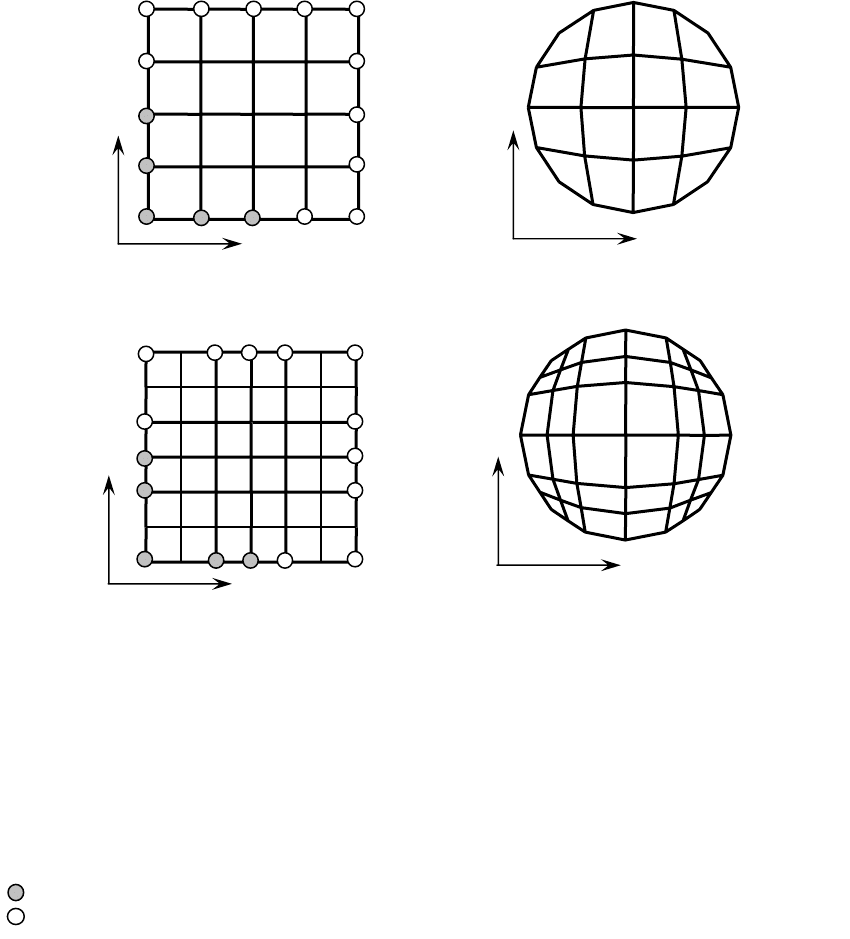
Як приклад на рис.7.17,
а, б подано фігуру простої геометричної
форми (плоский диск) у зазначених вище системах координат.
X
1
б
Y
1
X
2
a
Y
2
Y
1
X
3
в
Y
3
г
Р
исунок 7.17 – Геометрична модель плоского диска в сіткових і фізичній
системах координат:
а – у сітковій системі OX
2
Y
2
Z
2
при розмірі базової сітки 5x5;
б – у фізичній системі OX
1
Y
1
Z
1
при розмірі загальної сітки у системі OX
3
Y
3
Z
3
5
в – у сі
x5;
тковій системі OX
3
Y
3
Z
3
при
розмірі загальної сітки 7x7 і базової 5х5;
ми OX
2
Y
2
Z
2
;
слідок симетрії фігури
г – у фізичній системі OX
1
Y
1
Z
1
при розмірі загальної
сітки у системі OX
3
Y
3
Z
3
7x7;
– задані базові вузли систе
– програмно добудовані базові вузли вна
333
Для варіювання кількістю сіткових вузлів моделі, задання областей з
граничними умовами, що відрізняються, та областей з різними фізико-
механічними властивостями матеріалів використовується сіткова прямоку-
тна система
OX
3
Y
3
Z
3
. У ній задаються сіткові координати ліній, що прохо-
дять між сусідніми координатними лініями системи
OX
2
Y
2
Z
2
, а також закон
апроксимації фізичних координат вузлів, одержуваних у системі
OX
1
Y
1
Z
1
.
Геометрична інтерпретація використання системи
OX
3
Y
3
Z
3
наведена на
рис.7.17,
в, г.
Увесь набір даних, необхідних для формування сіткової моделі мож-
на скласти з атрибутів 21 виду. Ці відомості розміщуються в табличному
вигляді, наприклад, у трьох окремих файлах. Основними з атрибутів є на-
ступні:
I. Файл опису зв'язків між системами OX
1
Y
1
Z
1
і OX
2
Y
2
Z
2
:
кількість вузлів базової моделі уздовж координат системи
OX
2
Y
2
Z
2
;
•
•
•
•
•
•
•
•
номер перетину деталі уздовж осі
Z
2
, якому відповідає поточна
інформація з даного файла;
кількість заданих базових вузлів каркаса даного перетину;
ознака симетрії для даного перетину деталі в площині
X
1
OY
1
;
фізичні координати базових вузлів кожного з перетинів у його
локальній системі координат, масштаб і кути повороту перетину
щодо основної системи координат
OX
1
Y
1
Z
1
.
II. Файл опису зв’язків між системами OX
2
Y
2
Z
2
і OX
3
Y
3
Z
3
:
розміри сіткової області в системі координат
OX
3
Y
3
Z
3
і сіткові
координати базових вузлових точок у системі
OX
3
Y
3
Z
3
;
закони інтерполяції фізичних координат шуканих вузлів сітки, у
загальному випадку різні по кожній з осей сіткової системи
OX
3
Y
3
Z
3
.
III. Файл опису топології конструкції, тобто меж області моделі і
відповідності фізико-механічних властивостей складовим її
елементів для складених конструкцій:
відомості про підобласті, які відповідають різнорідним матері-
алам;
334
відомості про підобласті, які складають фізично однорідну час-
тину моделі;
•
• опис порожнин і вирізів синтезованої конструкції в системі
OX
3
Y
3
Z
3
окремо для кожної з фізично-однорідних частин моде-
лі.
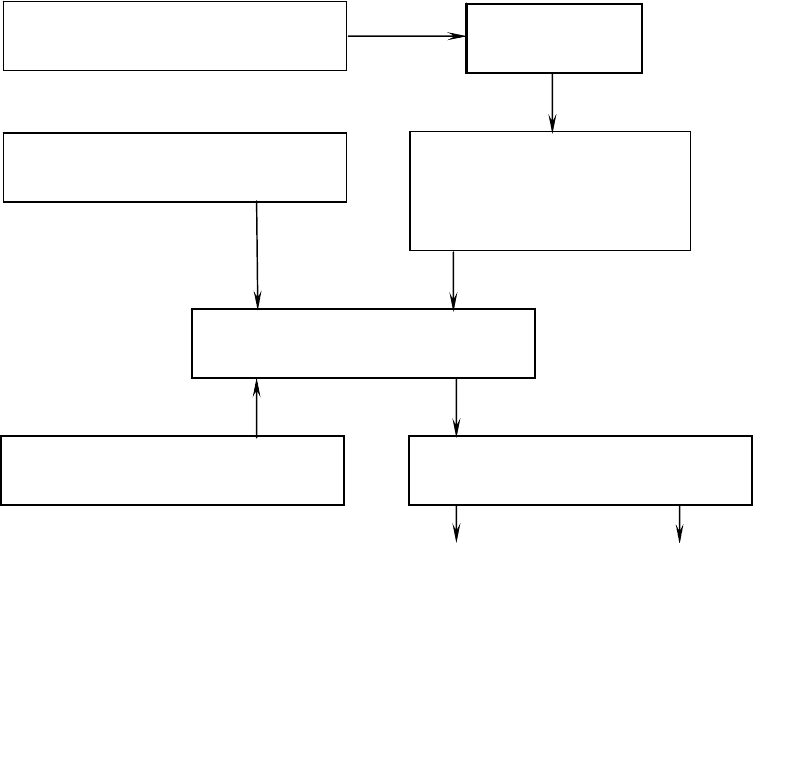
Структуру зазначених файлів, що містять інформацію про геометри-
чну модель поршня швидкохідного дизеля подано в додатку 4, схему фун-
кціонування програмного комплексу – на рис.7.18.
I. Файл опису зв’язків між си-
стемами OX
1
Y
1
Z
1
і OX
2
Y
2
Z
2
III. Файл опису зв’язків між
системами OX
2
Y
2
Z
2
і OX
3
Y
3
Z
3
Синтез базової
моделі
Визначені координати
програмно-добудованих
базових вузлів у системі
OX
1
Y
1
Z
1
Синтез геометричної моделі
конструкції
III. Файл опису топології
конструкції
До підсистем
функціонального
аналізу
Геометрична модель
об’єкта проектування
До підсистеми
машинної
графіки
Рисунок 7.18 – Структурна схема функціонування програмного
комплексу з автоматизованого синтезу сіткової моделі об’єкта
проектування
Результати генерації сіткової моделі поршня по наведеним у додат-
ку 4 вихідним даним подано на рис.7.19,
а. При цьому повинно бути ясно,
що зміна значення довільного з атрибутів вхідних даних дозволяє одержа-
ти нову конструкцію досліджуваного об’єкта з геометричними або (і) фі-
335
зичними параметрами, що відрізняються від вихідної моделі. Так на
рис.7.19,
б подано модель поршня зі зміненою конфігурацією КЗ та в разі
згущення сітки в зоні її кромки. При цьому для першого поршня модель
визначено шляхом завдання 83 базових вузлів, а другого – 160. Водночас
відтворення конфігурації КЗ у першому випадку потребує задання коорди-
нат 18 вузлів, у другому – 25.
б
а
Рисунок 7.19 – Приклади
синтезованих в САПР
сіткових моделей
поршнів (НТУ “ХПІ”):
а – з регулярною сіткою;
б – з нерегулярною
В цілому подане дозволяє розглядати наведений підхід для будови
сіткових моделей оригінальних деталей в разі необхідності подальшого ре-
дагування розробленої інформаційної моделі об’єкта проектування.
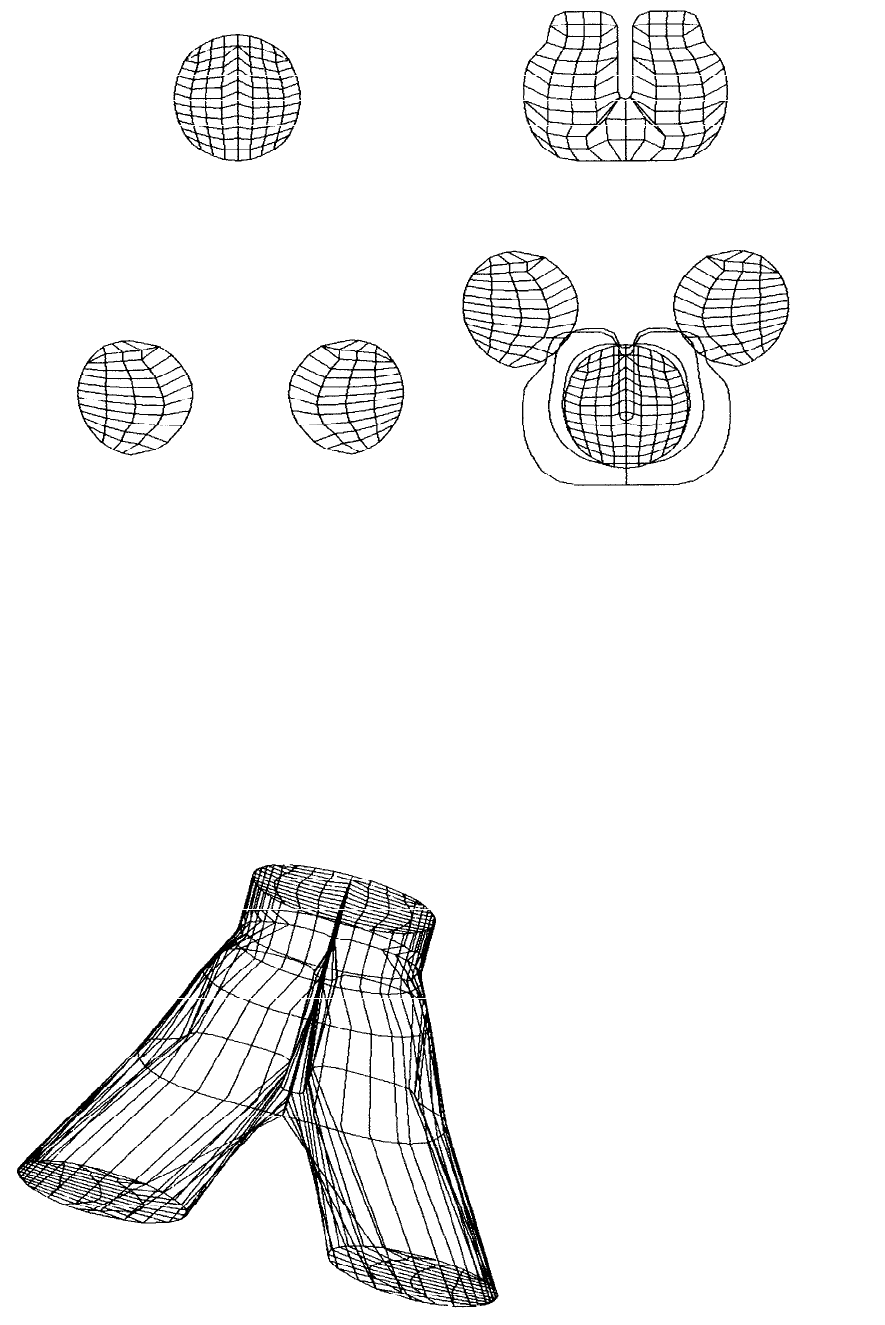
Іншим прикладом отримання машинного уявлення про досліджува-
ний об’єкт може служити задача формування геометричної моделі газопо-
вітряного каналу головки циліндрів двигуна по його кресленню. Вона
пов’язана з необхідністю виконання аналізу можливостей прототипів, у
число котрих, безумовно, повинні входити і конструкції, отримані в ре-
зультаті “ручного” проектування. Результати розв’язання поставленої за-
дачі з залученням вищеописаного методу і програмного комплексу наведе-
ні на рис.7.20, 7.21.
336
б
а
в
г
Р
исунок 7.20 – Результати формування ряду перетинів
р
озгалуженого впускного канала:
а – до розгалуження;
б – в місці розгалуження; в – після розгалуження;
г – відносне розміщення перетинів
Р
исунок 7.21 – Каркасна модель
впускного канала (НТУ “ХПІ”)
337
Таким чином, третій підхід може бути використано для одержання
плоских, вісьосиметричних і об’ємних моделей деталей та їх візуального
контролю. Далі до системи функціонального аналізу інформація переда-
ється у вигляді таблиць координат вузлів сітки в системі
OX
1
Y
1
Z
1
і даних
про код матеріалу певної підобласті.
7.4.4. Синтез суцільної моделі об’єкта проектування
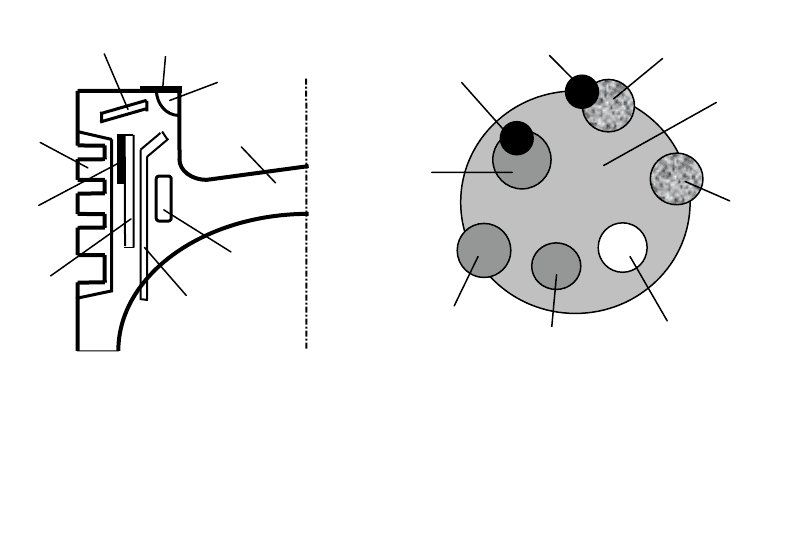
Розглянемо типову узагальнену схему нероз’ємної конструкції
поршня швидкохідного дизеля. Таку схему подано на рис.7.22, з якого ви-
дно, що цю конструкцію можна розподілити на власно тіло поршня 1 та
елементи, що підвищують міцність зони кромки КЗ 2 і
області ПК 3, кіль-
цеву порожнину для масляного охолодження 4, кільцеві вставки 5 – 7, ни-
зькотеплопровідні покриття 8, 9. У цілому конструкція поршня може мати
довільне сполучення і кількість елементів 2 – 9, що її доповнюють. Мож-
ливі варіанти контакту цих елементів між собою.
Ω
1
Ω
4
Ω
2
Ω
9
Ω
6
Ω
7
Ω
8
Ω
5
8
6
5
3
2
1
7
9
4
б а
Ω
3
Рисунок 7.22 – Типова узагальнена конструкція поршня
швидкохідного дизеля (а) і її логічна схема (б)
Зрозуміло, що одержання типового математичного опису для такої
конструкції представляє суттєві труднощі.
З іншого боку
ясно, що одержання шуканого рішення на основі опи-
338

су власне області тіла поршня 1 і окремо для областей кожного з його еле-
ментів 2 – 9 є менш складною задачею. Таке рішення має наступний алгеб-
рологічний вигляд
(
)
921
,...,,
Ω
Ω
Ω
=
Ω F
,
),...,,...,(
,,2,1, kijiiiii
F
Ω
Ω
Ω
Ω=Ω
, (7.17)
()
0,
,,
≥σ=
Ω
zr
jiji
, i=1,2,...,9 , j=1,2,...,k ,
де
– елементарні підобласті, що утворюють область ; –
набір аналітичних функцій, що дозволяють окреслити область
.
ji,
Ω
i
Ω
(
zr
ji
,
,
σ
)
i
Ω
Тут обрано вісьосиметричний підхід до опису геометрії областей, що
досліджуються. З точки зору визначення термонапруженого стану поршня
такий підхід може являтися методичною основою подальшої тривимірної
постановки задачі.
Області
та елементарні підобласті
i
Ω
ji,
Ω
краще розглядати як
множину точок, що утворюють даний елемент. Будемо додержуватись на-
ступних знаків логічних операцій, які дозволяють за допомогою наданих
множин точок будувати нові множини:
1) сума (об’єднання)
– множина усіх елементів (точок), які
якнайменше належать
A або B;
BA U
2) добуток (перетин)
– множина усіх елементів (точок), які
одночасно належать
A і B;
BA I
3) різниця
A /B – множина усіх елементів (точок) множини A, які не
належать
B;
4) протилежність (доповнення)
A
– множина, що має усі точки уні-
тарного простору, які не належать до
A.
Тоді, маючи типові рішення для складових конструкції поршня еле-
ментів відповідно до рис.7.22,
б можна записати логічну формулу всієї
моделі:
94321
Ω
Ω
Ω
ΩΩ=
Ω
UUIUU ...
. (7.18)
Зупинимося детальніше на логічній формулі власно тіла поршня,
розподіляючи її на зони камери згоряння
1,1
Ω
, бокової поверхні та
внутрішніх поверхонь днища й юбки
2,1
Ω
3,1
Ω
:
339