Петров Ю.П. Очерки истории теории управления
Подождите немного. Документ загружается.

§ 3. Расчеты систем управления...
35
Книга Н. Винера "Кибернетика" известна и популярна из-за своей
первой части (страницы
5—80
русского перевода), где очень ярко
обрисована роль обратной связи, роль информации не только
в технических системах, но и в природе, и человеческом общест-
ве;
материал, изложенный на страницах 81—ПО, был доступен
для понимания очень малому кругу лиц.
Только несколько позже уже другие ученые коренным образом
улучшили изложение результатов теории случайных процессов.
В ее основе лежит понятие корреляционной функции Л
ф
(т) ста-
ционарного случайного процесса
ц>(г),
определяемой равенством
1
Т
*
ф
(т)= Нт— Гф(ОФ(г + т)А. (18)
т—>°°
27 _
т
Корреляционная функция отражает тесноту связи между зна-
чениями (р(г), разделенными временем т. При т = 0 получаем
средний квадрат ф(0> обозначаемый обычно угловыми скобками:
/ \ 1 '
(ф
2
)= Нт— |ф
2
(/)Л =
*
ф
(0).
(19)
В приложениях очень часто встречаются корреляционные функ-
ции, близкие к экспоненте:
*
Ф
(т) = (ф
2
)^'
т
. (20)
Заметим, что хотя в формулу (18) входит интегрирование по бес-
конечному промежутку, в действительности хорошее приближе-
ние к корреляционной функции можно получить, интегрируя из-
меренные значения ф(?) и ф(г + т) на совсем умеренном
интервале [-Г;+Г]. Корреляционная функция, таким образом,
вычисляется несложно, а затем к ней применяют косинус-
преобразование Фурье— т.е. А-
ф
(т) умножают на созшт. интег-
рируют по т и получают функцию 5
ф
((о), которую называют
36
§ 3.
Расчеты систем
управления...
спектром (или спектральной плотностью мощности) процесса
(р(0:
5
ф
(со) = —
|А:
Ф
(т) сое тек. (21)
л
о
Если, например,
*
ф
(т) =
е~
ат
, то, вычисляя интеграл (21), по-
лучаем:
5
ф
(со)=- ° (22)
я а
-2
+
со
2
Наиболее важным свойством спектральных плотностей мощно-
сти является то, что для них операция дифференцирования пере-
ходит в гораздо более простую операцию умножения на квадрат
модуля комплексного числа /со. Действительно, если у
=
их, то
спектры функций у(() и х{1) связаны простым равенством
5/со)
=
|усо|
2
5,(со).
Из этого равенства следует, что для вычисления среднего квадра-
та <х > решения х(() линейных дифференциальных уравнений
вида (16), где А(й) — гурвицев полином, имеет место простая
формула:
(х
2
) = ]5
ф
(со)
й(й
(23)
Таким образом, если ф(0 — случайный процесс, то вычислить
само решение х(1) уравнения (16) невозможно, но зато средний
квадрат решения вычисляется по формуле (23) очень просто.
В
то
же время знание среднего квадрата говорит весьма много о ре-
шении х(1). Значения случайного процесса чаще всего распреде-
лены по нормальному закону, и тогда имеет место простое соот-
ношение: вероятность Р того, что значение х(1) не превысит
§ 3. Расчеты систем управления...
37
величины кс
х
(где а
х
=Мх )) , зависит только от к и выра-
жается формулой:
Р(\х\<ко
х
)
=
Ф(к), (24)
где Р — вероятность, а Ф(к) — известный "интеграл веро-
ятностей" (называемый еще интегралом Лапласа)
к У
Ф{к)
=
^=\е~
Т
с1у, (25)
л/2Яо
для которого были давно составлены подробные таблицы.
В частности, если к
=
3,
то Ф(А') =
0,9973.
Это означает, что
с вероятностью 0,9973 — т. е. с практической достоверностью —
модуль функции х(1) не превысит трех среднеквадратичных от-
клонений.
Данное соотношение позволяет легко производить практические
расчеты.
Пример: пусть мы для конкретного судна вычислили, пользуясь
формулами (18), (21) и (23), что среднеквадратичный угол крена
0
О
=
5°,
а опасность опрокидывания для данного судна начинает-
ся с крена 0 =
20°.
Тогда на основе формулы (25) мы делаем дос-
товерное заключение: максимальное значение угла крена не пре-
вышает 3-5° =
15,
и поэтому данная качка не опасна, к опроки-
дыванию судна она не приведет.
Начиная с 50-х годов XX века, простая формула (23) лежит в ос-
нове расчета качки судов на реальном, нерегулярном волнении,
расчета следящих систем, систем управления [83, 169, 194, 247,
248] и многих других расчетов.
Что касается расчета оптимального регулятора, обеспечиваю-
щего наилучшее качество управления, то здесь все сложнее. Дело
в том, что поиск оптимального регулятора — это, фактиче-
ски,
поиск оптимального оператора, наилучшим образом преоб-
разующего функцию х(1) на входе регулятора в функцию н(г),
38
§ 3.
Расчеты систем
управления...
где и — управляющее воздействие на его выходе. В свое время
Н. Винер предложил следующую классификацию математиче-
ских объектов в порядке их возрастающей сложности:
1.
Функция — она ставит в соответствие числу (аргументу функ-
ции) другое число — значение функции. Дифференциальное
исчисление позволяет найти аргумент, доставляющий макси-
мум (или минимум) функции.
2.
Функционал (пример — определенный интеграл) — он ставит
в соответствие функции число — значение функционала. Ва-
риационное исчисление позволяет найти функции, достав-
ляющие максимум (или минимум) функционалам.
3.
Оператор (пример — оператор дифференцирования) — он
функции ставит в соответствие другую функцию. Пока не су-
ществует математического аппарата, позволяющего система-
тически находить операторы, оптимальные в том или другом
смысле.
В последнее время термин "оператор" получил другие опреде-
ления; однако классификация Н. Винера наиболее наглядна и
подчеркивает трудность задачи поиска оптимального оператора.
§ 4. Синтез регуляторов,
доставляющих минимум
среднеквадратичному
критерию качества
Трудная задача синтеза регулятора, доставляющего минимум
среднеквадратичному критерию качества при наличии не пол-
ностью известных возмущающих воздействий случайного харак-
тера, постепенно решалась разными путями в начале второй по-
ловины XX века (работы [26, 31, 156. 159, 169, 247, 248, 268]).
В основе всех путей к решению лежат переход в частотную об-
ласть, использование спектров возмущающих воздействий и со-
отношений (23), позволивших свести задачу поиска наилучшего
оператора к задаче поиска функции, доставляющей экстремум
среднеквадратичному функционалу.
Для пояснения возникавших у исследователей трудностей изло-
жим один из путей решения проблемы синтеза регулятора для
простейшего объекта управления вида
Д(О)л- = н+ф(0, (26)
где х — регулируемая переменная (точнее, ее отклонение от же-
лаемого для нас значения, соответствующего х
=
0), Л(О) — по-
лином от оператора дифференцирования вида (12), и — управ-
ляющее воздействие, (р(0 — возмущающее воздействие,
стационарная случайная функция времени со средним значением,
равным нулю, для которой предполагается известной корреляци-
40
§ 4.
Синтез
регуляторов...
онная функция
К^{х),
или, что то же самое, с учетом равенства
(21) — ее спектр 5
ф
(о)).
Для объекта управления (26) ставится задача о поиске линейного
регулятора с обратной связью вида
и
=
№(0)х
=
_ ЩР)
Щ(О)
(27)
где Щ{й) и Щ(й) — полиномы от оператора дифференци-
рования. Этот регулятор должен обеспечить минимум функ-
ционалу
{х
2
)
=
\\т^\х
2
<И
(Т.
е. среднему квадрату регулируемой переменной) при учете
ограничения на средний квадрат управляющего воздействия:
7*
(и
2
)
=
Ит^и
2
а(
=
А
0
.
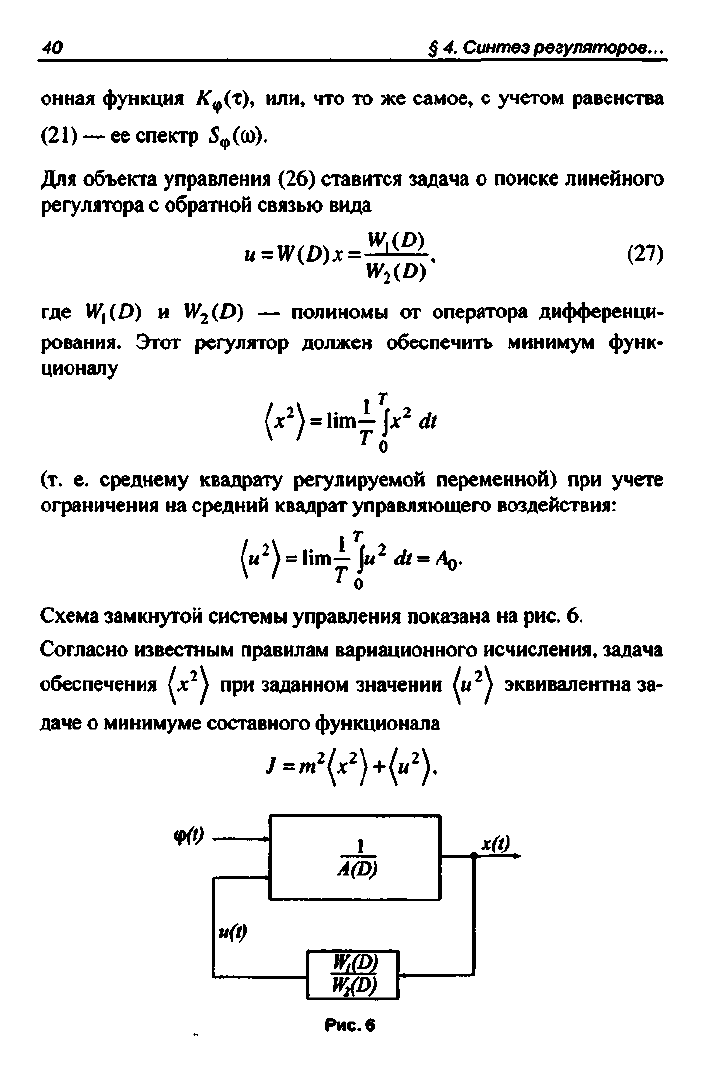
Схема замкнутой системы управления показана на
рис.
6.
Согласно известным правилам вариационного исчисления, задача
обеспечения (х
2
) при заданном значении (и
2
) эквивалентна за-
даче о минимуме составного функционала
/
=
т
2
(*
2
)
+
(и
2
),
Рис.6
$
4.
Синтез
регуляторов...
41
2
где т — множитель Лагранжа, постоянное (неотрицательное)
число, подлежащее в дальнейшем определению.
Сформулированная задача не очень хорошо отражает реальные
требования к системам управления, поскольку в реальных систе-
мах почти всегда ограничен не средний квадрат, а предельное
значение управляющего воздействия:
" тт
—
"
—
" тах
•
Однако точное решение задачи синтеза оптимального регулятора
при реальных ограничениях на управление до настоящего време-
ни не получено, и поэтому с давних пор довольствуются ограни-
чением на средний квадрат. Учет этого ограничения даст лишь
приближенное решение задачи о минимуме (х ), однако именно
поиску этого приближенного решения было посвящено большое
количество различных исследований [26, 31, 140, 141, 156, 169,
172,
192, 247, 248, 266, 268].
Из формул (26) и (27) следует, что
[А(0)-\Уф)]х
= <р(1)
и, значит, с учетом формулы (23) имеем:
<1ы
(л
2
)=|5
ф
(со)
о |ЛОш)-1УОсо)|'
Аналогично вычисляется значение среднего квадрата управления
|2
(и
2
)=/5
ф
(ш) '
>]
^
Х
' о |Д(;со)-^(;ш)|
2
и составного критерия
^
=
т
2
(x
2
)
+
(и
2
)= 8^(0)- ' ' , Лео. (28)
Х
'
Х
I о |Л(;ш)-\У(;(0)|
2
Для вычисления минимума составного критерия достаточно по
обычным правилам вариационного исчисления найти функцию
42
§4.
Синтез
регуляторов...
И^О'Сй), оставляющую минимум функционалу (28). После неслож-
ных вычислений была получена функция
А(-;СО)
откуда, казалось бы, следует, что оптимальный оператор в цепи
обратной связи имеет вид
__гг
2
'опт
то)оп
т
=
т
А(-Р)
а оптимальным регулятором является регулятор
т
2
•х.
"'"" А(-О)
Однако этот регулятор (как будет далее показано) не обеспечива-
ет устойчивости замкнутой системы, и поэтому при минимизации
критерия (28) допустимы не любые вариации функции И^(у(0),
а лишь те, которые совместимы с устойчивостью. Это обстоя-
тельство потребовало значительно более сложных выкладок при
минимизации функционала (28) (полностью эти выкладки
приведены, например, в
[195],
стр. 59—62), и они приводят,
в конечном счете, к следующему алгоритму синтеза регулятора,
обеспечивающего минимум критерия (28) при дополнительном
условии устойчивости замкнутой системы.
1.
В основу расчета берется аналитическая аппроксимация экспе-
риментальных данных о спектре возмущающего воздействия
ф(г),
спектр аппроксимируется дробно-рациональной функцией:
(29)
"9"
' "<{-
а„$
у
+а„_1« ^ +... +
ЙЛ
(предварительно в спектре 5
ф
(со) переменная со заменяется
для удобства на переменную
$
=
_/(>)).
Далее спектральная
плотность мощности (29) факторизуется
5
ф
(*) =
5,
(*)$,(-*), (30)
§ 4. Синтез регуляторов...
43
т. е. представляется, как произведение двух симметричных
множителей 5,0) и 5
(
(—5),
один из которых зависит от 5,
другой — от -\. Поскольку числитель и знаменатель дроби
(29) — функции четные, то они имеют соответственно 1р и 2ц
симметричных корней: Х
]
и -Л,; к
2
и -к
2
и т. д. В множи-
тель 5|(я) войдут все корни с отрицательными веществен-
ными частями, в множитель
5,(-л)
войдут все корни с по-
ложительными вещественными частями. Таким образом,
(31)
и числитель, и знаменатель функции 5,(5) являются гурвице-
выми полиномами.
Заметим еще, что величину среднего квадрата возмущающего
воздействия удобно нормировать, т. е. принять раз и навсегда,
что (ф ) =
1.
Поскольку оптимальный регулятор линеен, то
на его расчет нормировка не повлияет.
На втором шаге алгоритма точно так же факторизует-
ся полином
А(х)А(-.ч)
+
т
2
=0(Л')С(-.У) (32)
с целью вычисления полиномов С(х) и С7(-я). При этом
С (а) — гурвицев полином (т. е. у всех его корней веществен-
ные части отрицательны), а С(-х) — не гурвицев.
Выполняется разложение на дроби (сепарация):
(33)
где М
0
— целый полином, Л/
+
— правильная дробь с полю-
сами в левой полуплоскости комплексного переменного
х,М
_ — правильная дробь с полюсами в правой полуплоско-
сти А.
44
§ 4.
Синтез
регуляторов...
Строится функция
Ф
2
(8) ОДЗД'
с помощью которой уже непосредственно находятся поли-
номы
У/
х
{0)
и Щ(й) в оптимальном регуляторе (27):
Ш1
шМ1
»-*№.
(
35)
Щф) Ф,ф)
Подставив (35) в (26), получим уравнение замкнутой системы:
Ф
2
(д)х
= Ф,(*)ф. (36)
Поскольку, как это следует из формулы (34), полином Ф
2
($) бу-
дет иметь все корни в левой полуплоскости, то замкнутая система
будет устойчивой.
Мы убеждаемся, что параметры оптимального регулятора вычис-
ляются по довольно сложному алгоритму. Для объектов управле-
ния вида А(0)д: = В(0)м + ф (где В(0)*1), при учете погреш-
ностей измерения и для многомерных систем алгоритм синтеза
оптимальных регуляторов еще намного сложнее. Заметим, что
если не учитывать требования устойчивости, а непосредственно,
методами вариационного исчисления искать регулятор, достав-
ляющий абсолютный минимум функционалу, то мы придем
к уже упоминавшемуся регулятору
и = х. (37)
Подставив (37) в (28), получим уравнение замкнутой системы:
[д(0)Д(-0) + т
2
]д: = Д(-0)ф(Г). (38)
Характеристический полином уравнения (38) при любом А(О)
будет иметь корни с положительными вещественными частями,
и поэтому замкнутая система будет неустойчива.
Отметим, что это не является непреодолимым препятствием
к реализации оптимального движения объекта управления, опи-