Pecharsky V.K., Zavalij P.Y. Fundamentals of Powder Diffraction and Structural Characterization of Materials
Подождите немного. Документ загружается.

40
Chapter
I
a result, we need to introduce the so-called infinite or translational symmetry
elements in addition to the familiar finite or non-translational symmetry
elements, which can be present in a lattice as well. Translation or shift is a
simple infinite symmetry element (see
Figure
1.7). When acting
simultaneously, translation and rotation result in screw axes; translation and
reflection in a mirror plane produce glide planes
(Table
1.3). Screw axes and
glide planes are, therefore, complex infinite symmetry elements.
1.13.1
Glide planes
The combination of a mirror reflection plane with the corresponding
translations that are always parallel to the plane, results in a total of five
possible crystallographic glide planes.' The allowed translations are 112 or
114 of the length of the basis vector, parallel to which the shift (i.e. gliding)
occurs. All possible glide planes are listed in
Table
1.15 together with their
graphical symbols. Since each of the glide planes produces an infinite
number of symmetrically equivalent objects from the original, the order of
the plane indicates the number of symmetrically equivalent objects within
the boundaries of one unit cell, and is also listed in
Table
1.15.
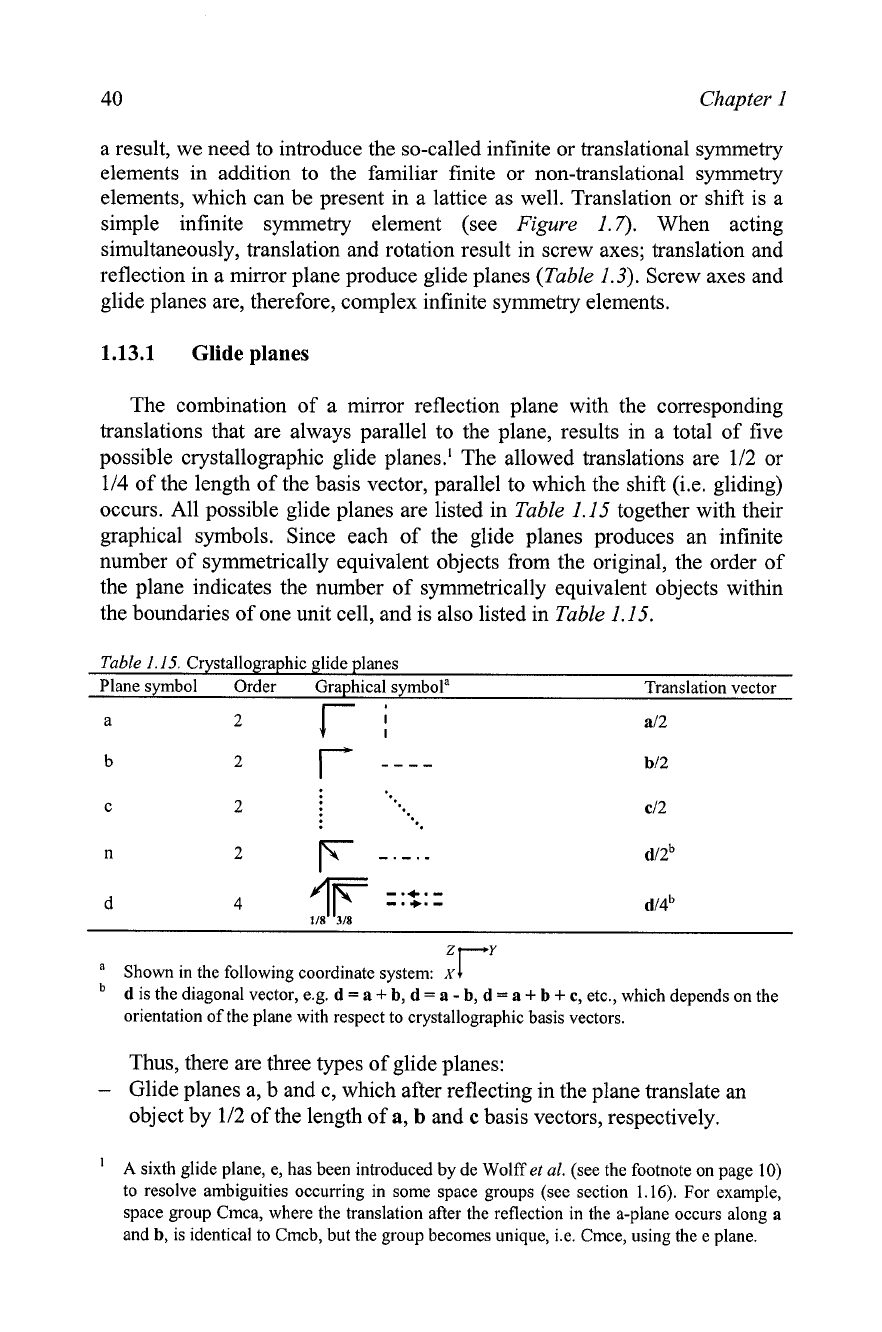
Table
1.15.
Crystallographic glide planes
Plane symbol Order Graphical symbola Translation vector
7.
d
d14~
a
Shown in the following coordinate system:
x
rY
d
is the diagonal vector, e.g.
d
=
a
+
b,
d
=
a
-
b,
d
=
a
+
b
+
c, etc., which depends on the
orientation of the plane with respect to crystallographic basis vectors.
Thus, there are three types of glide planes:
-
Glide planes a, b and c, which after reflecting in the plane translate an
object by 112 of the length of a,
b
and
c
basis vectors, respectively.
'
A sixth glide plane, e, has been introduced by de Wolff
et
al.
(see the footnote on page
10)
to resolve ambiguities occurring in some space groups (see section 1.16). For example,
space group Cmca, where the translation after the reflection in the a-plane occurs along
a
and
b,
is identical to Cmcb, but the group becomes unique, i.e. Cmce, using the e plane.
Fundamentals
of
crystalline state
41
Because of this, for example, glide plane, a, can be perpendicular to
either b or
c,
but it cannot be perpendicular to
a.
Similarly, glide plane, b,
cannot be perpendicular to b, and glide plane, c, cannot be perpendicular
to
c.
Since the translation is always by 112 of the corresponding basis
vector, these planes produce two symmetrically equivalent objects within
one full length of the corresponding basis vector (and within one unit
cell), i.e. their order is 2.
Glide plane n, which after reflecting in the plane translates an object by
112 of the length of the diagonal between the two basis vectors located in
the plane parallel to n. For example, glide plane, n, perpendicular to
c
will translate an object by 1/2(a
+
b). Glide plane n, results in two
symmetrically equivalent objects within the full length of the diagonal
vector (and within one unit cell) and its order is 2.
Glide planes d, which after reflecting in the plane translate an object by
114 of the length of the diagonal between the two basis vectors located in
the plane parallel to d. These planes, also known as "diamond" planes
since they are found in the diamond crystal structure, are always present
in pairs parallel to one another, and translate along different diagonals.
The length of the translation is 114, which results in a total of four
symmetrically equivalent objects per unit cell.
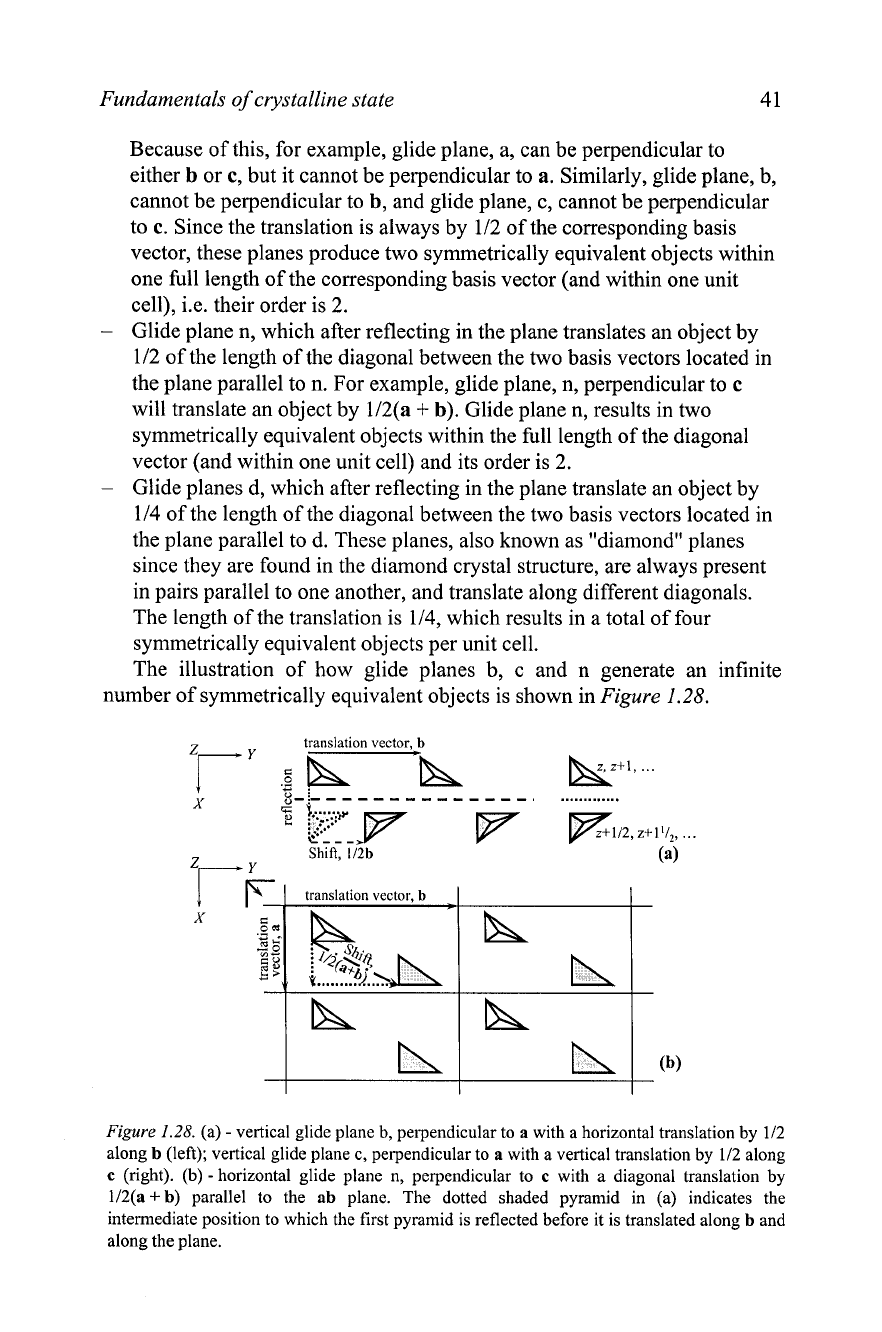
The illustration of how glide planes b, c and n generate an infinite
number of symmetrically equivalent objects is shown in
Figure
1.28.
X
.............
z+1/2, z+l1I2,
...
Shift,
112b
z-
Y
(a)
F
1
translation
vector,
b
I
Figure
1.28.
(a)
-
vertical glide plane b, perpendicular to a with a horizontal translation by 112
along
b
(left); vertical glide plane c, perpendicular to
a
with a vertical translation by 112 along
c
(right). (b) -horizontal glide plane n, perpendicular to
c
with a diagonal translation by
112(a
+
b) parallel to the ab plane. The dotted shaded pyramid in (a) indicates the
intermediate position to which the first pyramid is reflected before it is translated along b and
along the plane.
42
Chapter
I
1.13.2
Screw
axes
Screw axes perform a rotation simultaneously with a translation along the
rotation axis. In other words, the rotation occurs around the axis, while the
translation occurs parallel to the axis. Crystallographic screw axes include
only two-, three-, four- and six-fold rotations due to the three-dimensional
periodicity of the crystal lattice, which prohibits five-, seven- and higher-
order rotations. Hence, the allowed rotation angles are the same as for both
rotation and inversion axes (see
Eq.
1.2).
Translations, t, along the axis are also limited to a few fixed values,
which depend on the order of the axis, and are defined as t
=
k/N,
where
N
is
axis order, and k is an integer number between one and N-1. For instance,
for the three-fold screw axis, k
=
1 and 2, and the two possible translations
are 113 and 213 of the length of the basis vector parallel to this axis, whereas
for the two-fold axis, k
=
1, and only 112 translation is allowed.
The symbol of the screw axis is constructed as
Nk
to identify both the
order of the axis
(N)
and the length of the translation (k). Thus, the two
three-fold screw axes have symbols 31 and
&,
whereas the only possible
two-fold screw axis is 2,. The International symbols, both text and graphical,
and the allowed translations for all crystallographic screw axes are found in
Table
1.16.
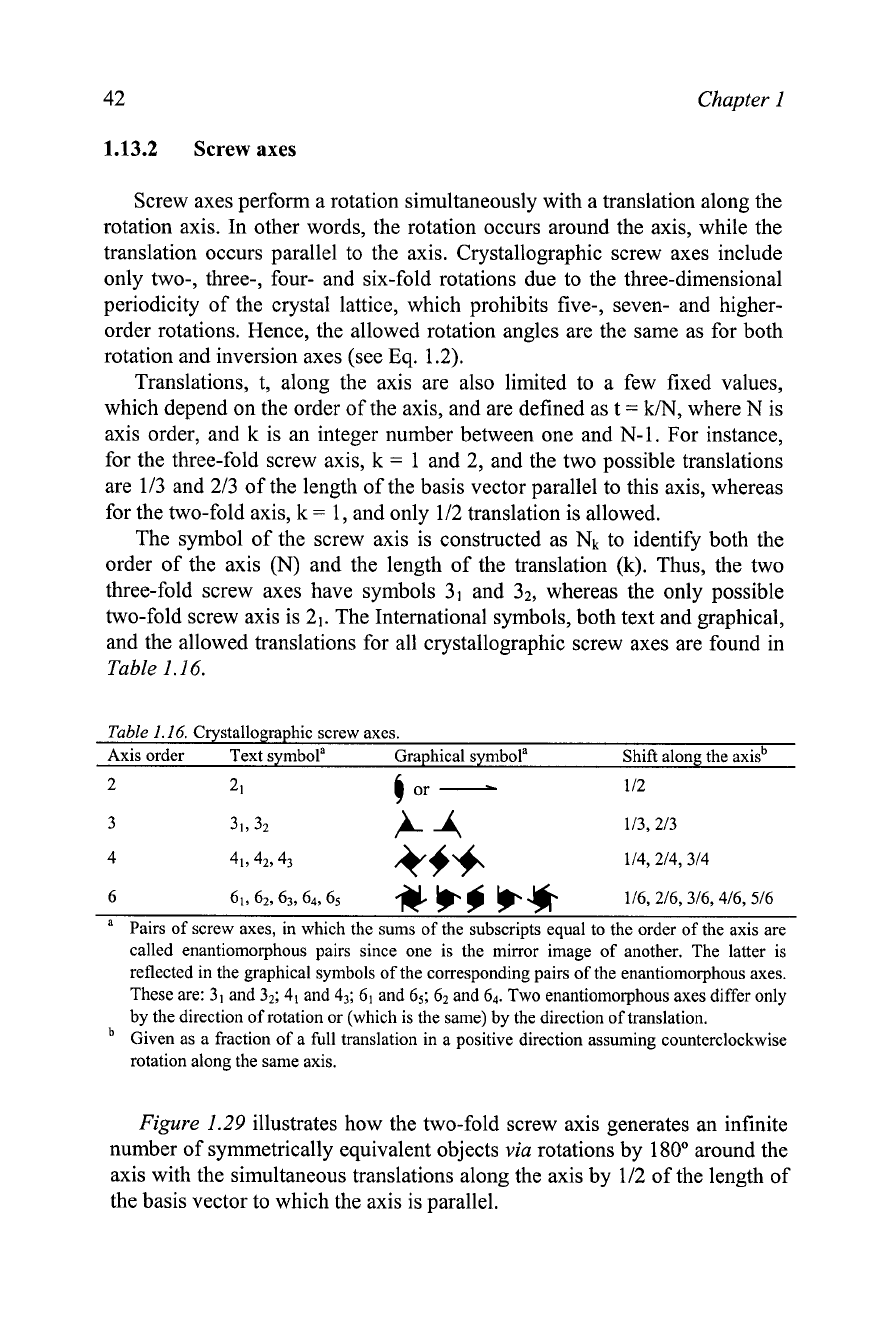
Table
1.16.
Crystallographic screw axes.
Axis order Text symbola Graphical symbola Shift along the axisb
2 21
4
or
-
1 12
6 61,6*.63,6,, 65
#
b
9
b
116,216,316,416, 516
a
Pairs of screw axes, in which the sums of the subscripts equal to the order of the axis are
called enantiomorphous pairs since one is the mirror image of another. The latter is
reflected in the graphical symbols of the corresponding pairs of the enantiomorphous axes.
These are:
31
and
32; 41
and
43;
61
and
65; 62
and
6+
Two enantiomorphous axes differ only
by the direction of rotation or (which is the same) by the direction of translation.
Given as a fraction of a full translation in a positive direction assuming counterclockwise
rotation along the same axis.
Figure 1.29
illustrates how the two-fold screw axis generates an infinite
number of symmetrically equivalent objects
via
rotations by 180" around the
axis with the simultaneous translations along the axis by 112 of the length of
the basis vector to which the axis is parallel.
Fundamentals
of
crystalline state
43
:.K
vector, b
z
z,
zfl,
...
x
.g
:
3:
L
,
.........::..
L
:
...'
:
...*
c----
Shift,
1/2b
z+1/2,
+I
z+11t2,
...
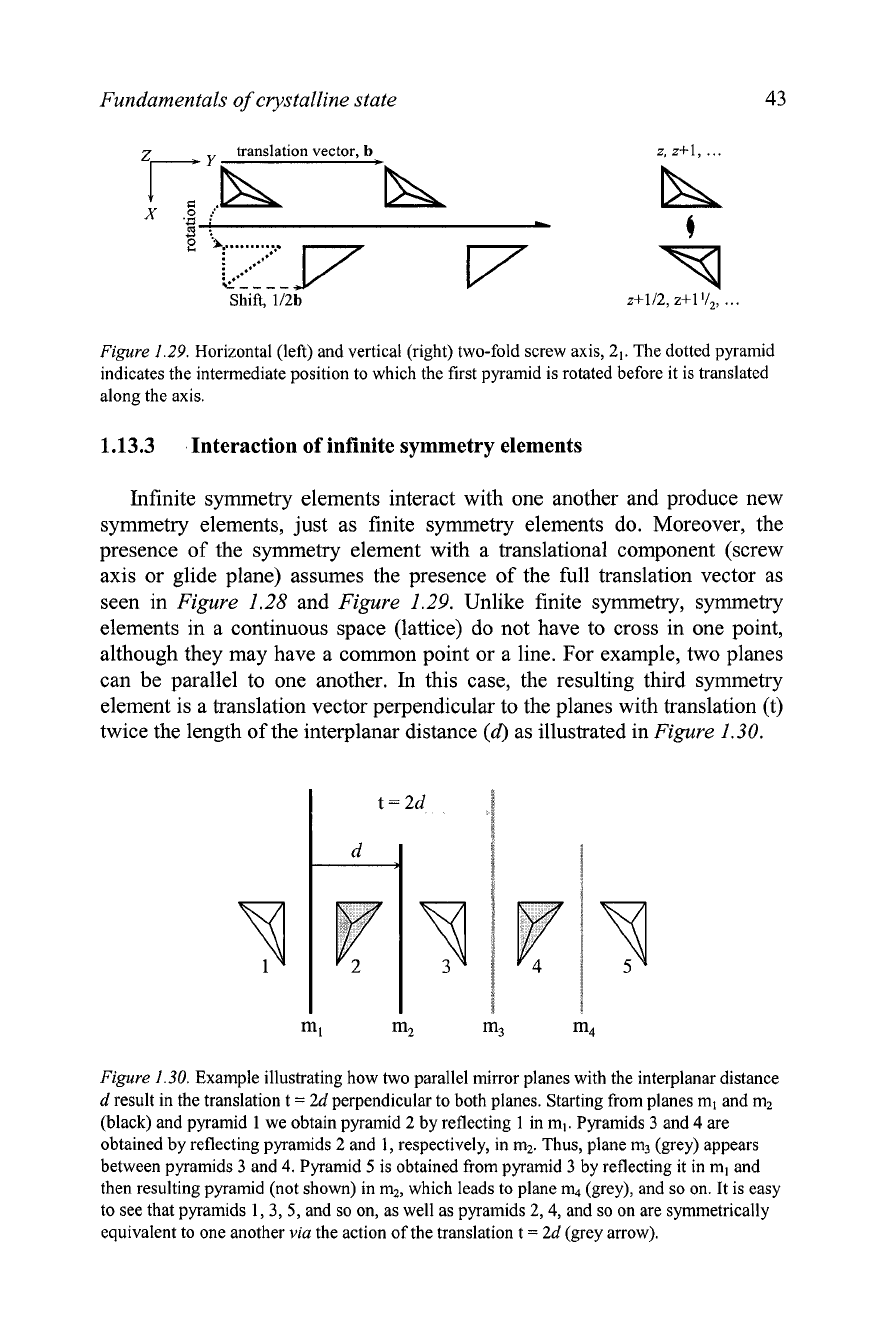
Figure
1.29.
Horizontal (left) and vertical (right) two-fold screw axis,
2,.
The dotted pyramid
indicates the intermediate position to which the first pyramid is rotated before it is translated
along the axis.
1.13.3
,Interaction of infinite symmetry elements
Infinite symmetry elements interact with one another and produce new
symmetry elements, just as finite symmetry elements do. Moreover, the
presence of the symmetry element with a translational component (screw
axis or glide plane) assumes the presence of the full translation vector as
seen in
Figure
1.28
and
Figure
1.29.
Unlike finite symmetry, symmetry
elements in a continuous space (lattice) do not have to cross in one point,
although they may have a common point or a line. For example, two planes
can be parallel to one another. In this case, the resulting third symmetry
element is a translation vector perpendicular to the planes with translation (t)
twice the length of the interplanar distance
(d)
as illustrated in
Figure
1.30.
Figure
1.30.
Example illustrating how two parallel mirror planes with the interplanar distance
d
result in the translation t
=
2d
perpendicular to both planes. Starting from planes m, and m2
(black) and pyramid 1 we obtain pyramid
2
by reflecting
1
in ml. Pyramids 3 and
4
are
obtained by reflecting pyramids
2
and
1,
respectively, in m2. Thus, plane m3 (grey) appears
between pyramids
3
and
4.
Pyramid
5
is obtained from pyramid
3
by reflecting it in ml and
then resulting pyramid (not shown) in m2, which leads to plane m4 (grey), and so on. It is easy
to see that pyramids
1,3,5, and so on, as well as pyramids
2,4,
and so on are symmetrically
equivalent to one another
via
the action of the translation t
=
2d
(grey arrow).
Chapter
1
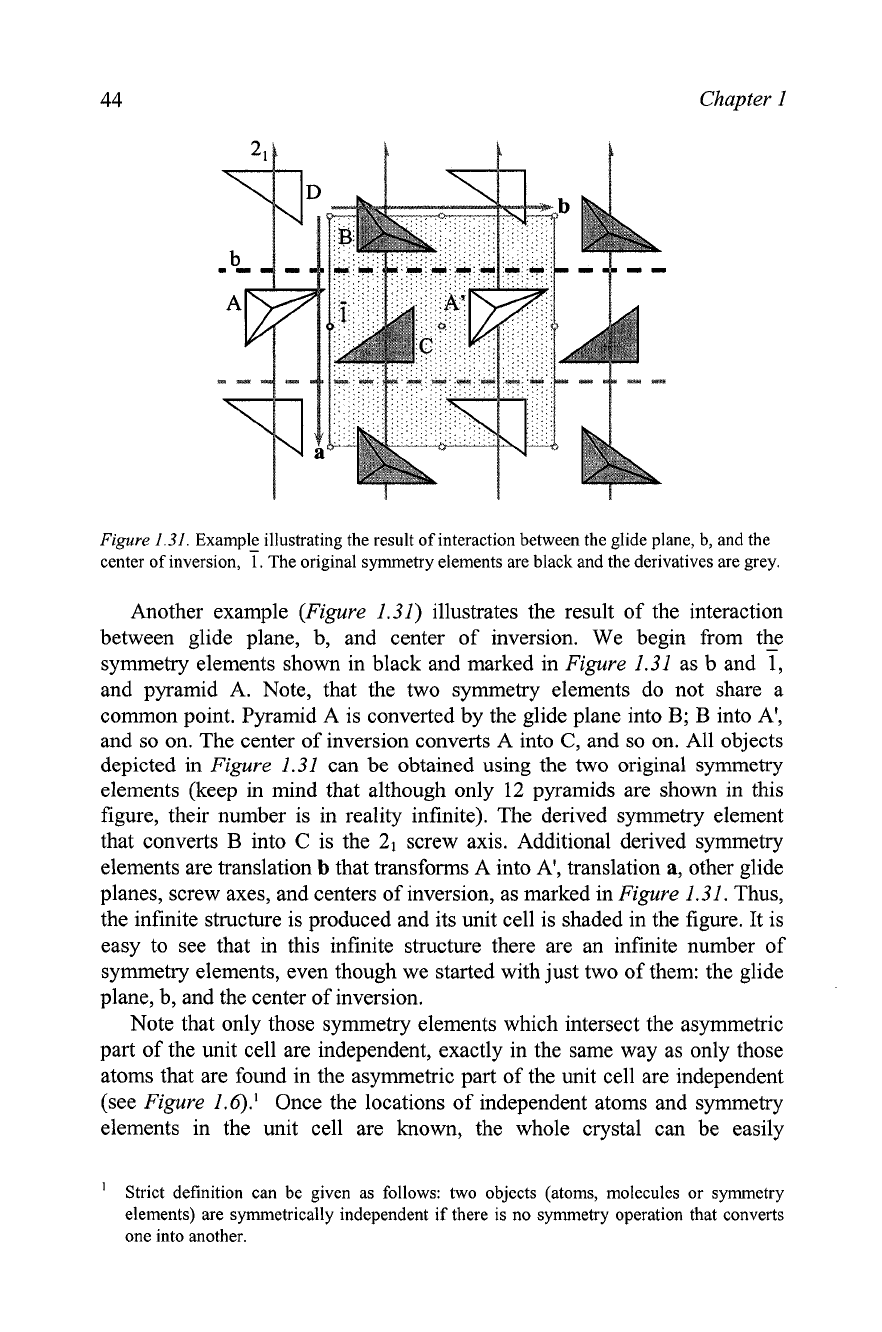
Figure
1.31.
Example illustrating the result of interaction between the glide plane, b, and the
center of inversion,
i.
The original symmetry elements are black and the derivatives are grey.
Another example (Figure
1.31)
illustrates the result of the interaction
between glide plane, b, and center of inversion. We begin from the
symmetry elements shown in black and marked in Figure
1.31
as b and
7,
and pyramid A. Note, that the two symmetry elements do not share a
common point. Pyramid A is converted by the glide plane into
B; B
into
A',
and so on. The center of inversion converts
A
into
C,
and so on. All objects
depicted in Figure
1.31
can be obtained using the two original symmetry
elements (keep in mind that although only
12
pyramids are shown in this
figure, their number is in reality infinite). The derived symmetry element
that converts
B
into
C
is the
21
screw axis. Additional derived symmetry
elements are translation
b
that transforms A into A', translation
a,
other glide
planes, screw axes, and centers of inversion, as marked in Figure
1.31.
Thus,
the infinite structure is produced and its unit cell is shaded in the figure. It is
easy to see that in this infinite structure there are an infinite number of
symmetry elements, even though we started with just two of them: the glide
plane, b, and the center of inversion.
Note that only those symmetry elements which intersect the asymmetric
part of the unit cell are independent, exactly in the same way as only those
atoms that are found in the asymmetric part of the unit cell are independent
(see Figure
I.@.'
Once the locations of independent atoms and symmetry
elements in the unit cell are known, the whole crystal can be easily
'
Strict definition can be given as follows: two objects (atoms, molecules or symmetry
elements) are symmetrically independent if there is no symmetry operation that converts
one into another.
Fundamentals
of
crystalline state
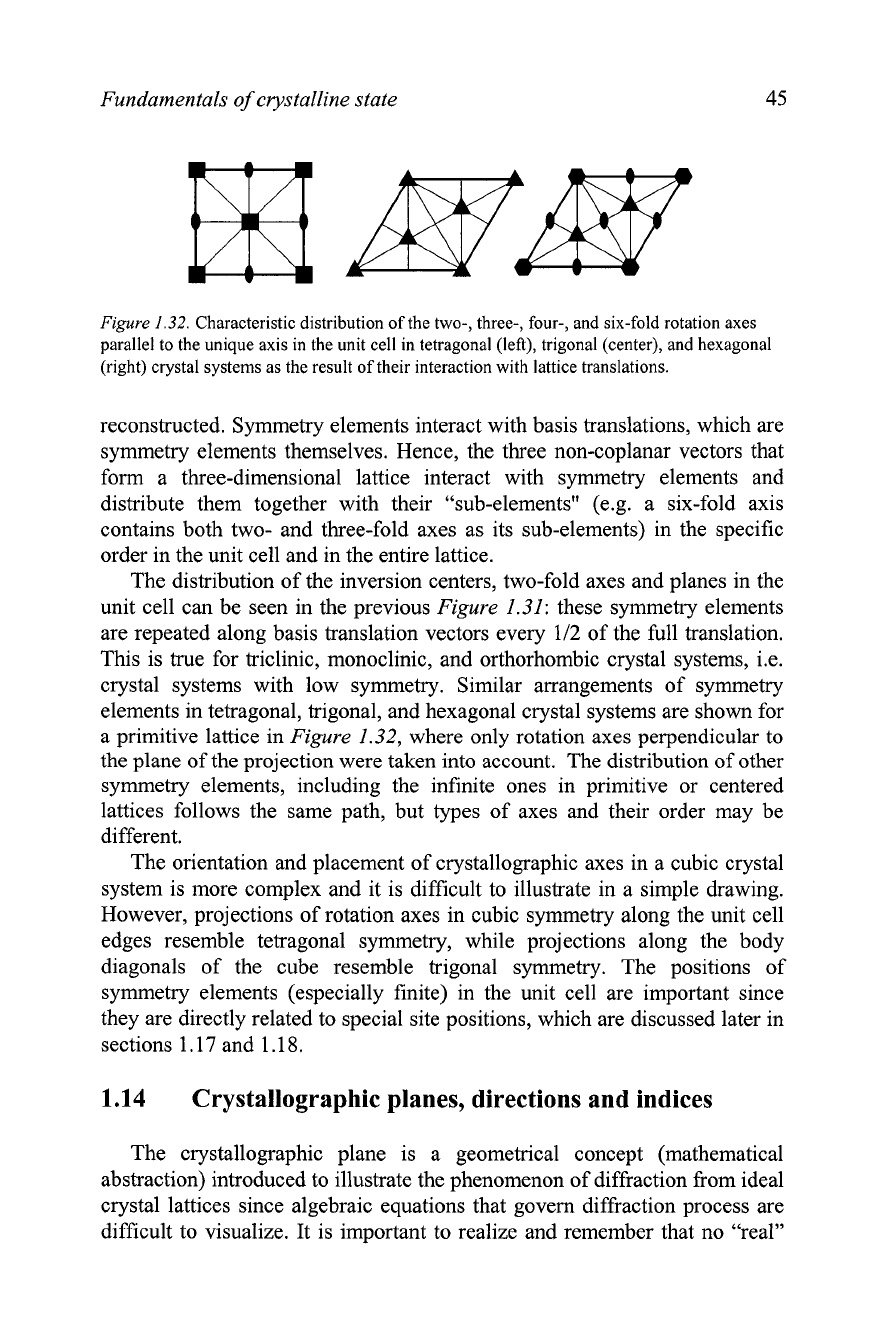
Figure
1.32.
Characteristic distribution of the two-, three-, four-, and six-fold rotation axes
parallel to the unique axis in the unit cell in tetragonal (left), trigonal (center), and hexagonal
(right) crystal systems as the result of their interaction with lattice translations.
reconstructed. Symmetry elements interact with basis translations, which are
symmetry elements themselves. Hence, the three non-coplanar vectors that
form a three-dimensional lattice interact with symmetry elements and
distribute them together with their "sub-elements"
(e.g. a six-fold axis
contains both two- and three-fold axes as its sub-elements) in the specific
order in the unit cell and in the entire lattice.
The distribution of the inversion centers, two-fold axes and planes in the
unit cell can be seen in the previous
Figure
1.31:
these symmetry elements
are repeated along basis translation vectors every 112 of the full translation.
This is true for triclinic, monoclinic, and orthorhombic crystal systems, i.e.
crystal systems with low symmetry. Similar arrangements of symmetry
elements in tetragonal, trigonal, and hexagonal crystal systems are shown for
a primitive lattice in
Figure
1.32,
where only rotation axes perpendicular to
the plane of the projection were taken into account. The distribution of other
symmetry elements, including the infinite ones in primitive or centered
lattices follows the same path, but types of axes and their order may be
different.
The orientation and placement of crystallographic axes in a cubic crystal
system is more complex and it is difficult to illustrate in a simple drawing.
However, projections of rotation axes in cubic symmetry along the unit cell
edges resemble tetragonal symmetry, while projections along the body
diagonals of the cube resemble trigonal symmetry. The positions of
symmetry elements (especially finite) in the unit cell are important since
they are directly related to special site positions, which are discussed later in
sections 1.17 and 1.18.
1.14
Crystallographic planes, directions and indices
The crystallographic plane is a geometrical concept (mathematical
abstraction) introduced to illustrate the phenomenon of diffraction from ideal
crystal lattices since algebraic equations that govern diffraction process are
difficult to visualize. It is important to realize and remember that no "real"
46
Chapter
1
crystallographic planes exist in real crystals. Furthermore, regardless of
whether the crystallographic plane is referred to in singular or in plural, the
reference is always made to a series, which consists of an infinite number of
planes.
1.14.1
Indices
of
planes
Crystallographic planes are defined as a set (or family) of planes that
intersect all lattice points. All planes in the same family are: (1) parallel to
each other, and (2) equally spaced. The distance between neighboring planes
is called the interplanar distance or d-spacing. The family of crystallographic
planes is described using three integer indices h, k, and I, which are called
crystallographic or Miller indices.' When referring to a plane, a triplet of
Miller indices is always enclosed in parentheses: (hkl). Miller indices
indicate that the planes that belong to the family (hkl) divide lattice vectors
(unit cell edges) a,
b
and c into h, k and
1
equal parts, respectively. When the
planes are parallel to the crystallographic axis, the corresponding Miller
index is set to
0.
The meaning of the Miller indices can be better understood after
considering Figure
1.33
through Figure
1.37.
In
Figure
1.33
both sets of
planes are parallel to
b
and c. Hence, in both cases k
=
I
=
0. The set of
planes shown on the left divides a into one part, while the planes shown on
the right, divide a into two equal parts. This results in the following Miller
indices: (100) for the drawing on the left, and (200) for that on the right of
Figure
1.33.
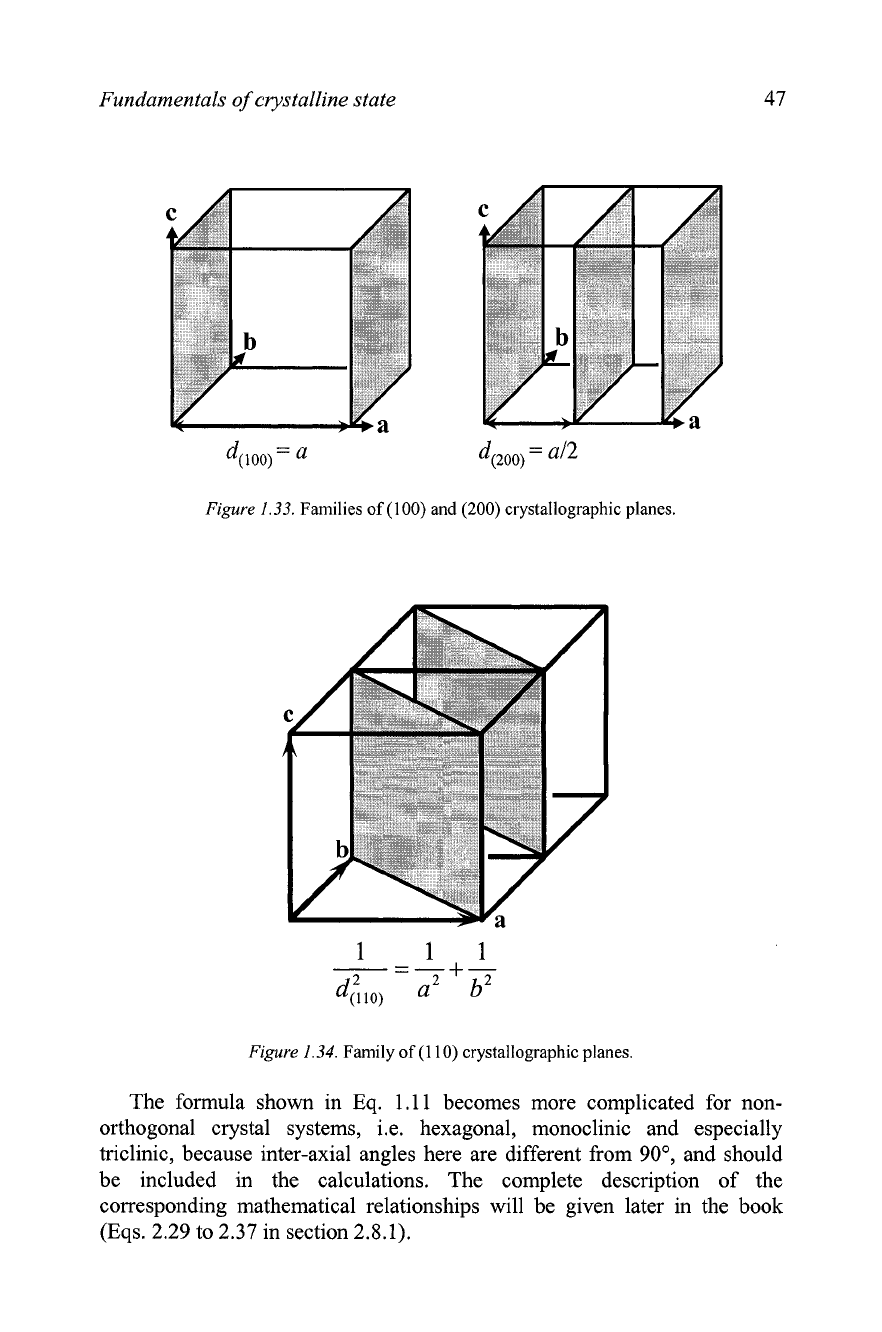
It is obvious that the interplanar distance d(zoo, is 112 that of
d(loo,, and the (200) family of crystallographic planes is considered as the
second order of the (100) family. Following the same rules, the planes
shown in Figure
1.34
are parallel to c and divide both a and
b
in one part,
which results in the (1 10) Miller indices for this family of crystallographic
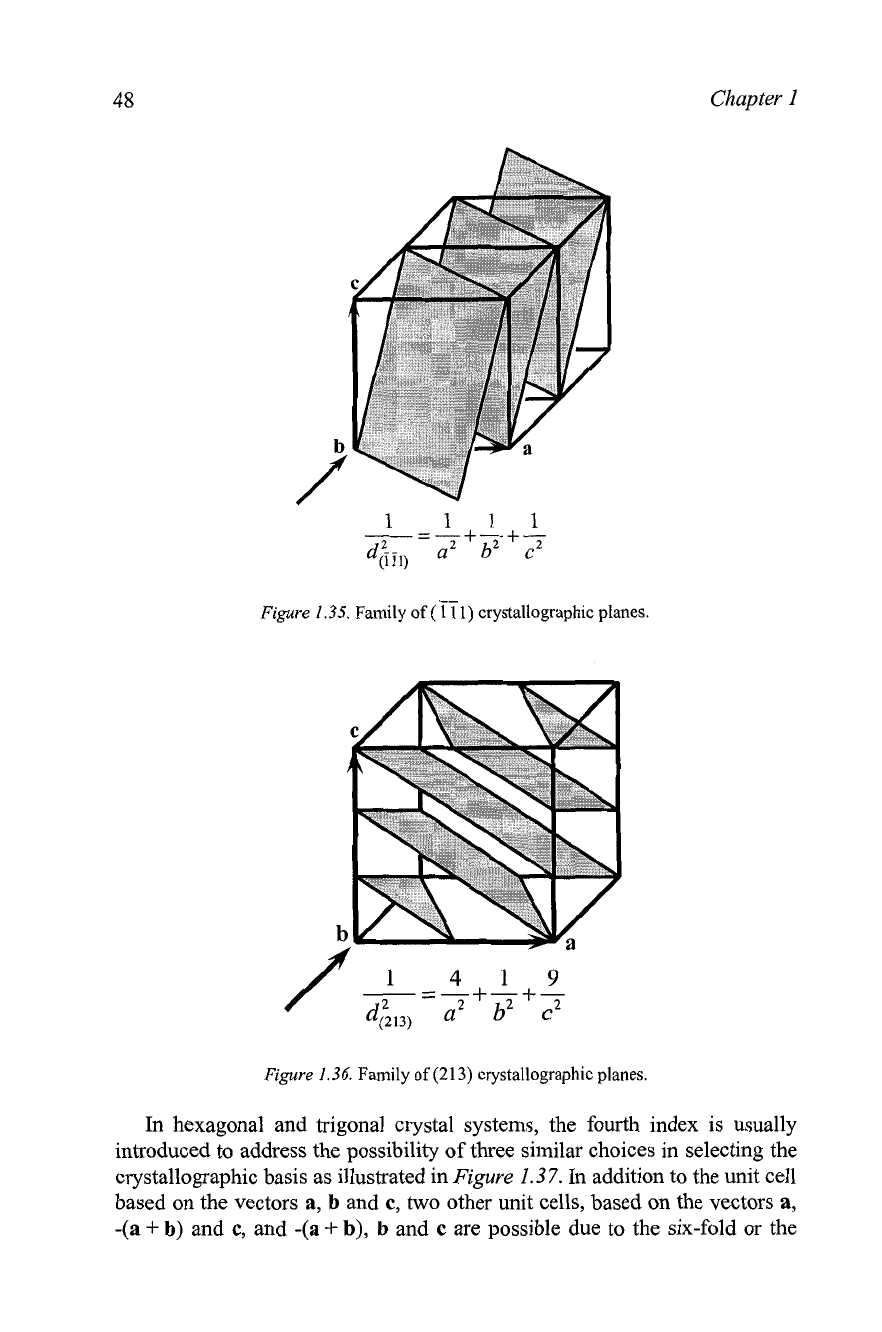
planes. Similarly, Figure
1.35
illustrates the (iil) and Figure
1.36
illustrates the (2 13) crystallographic planes.
Assuming that
a
=
P
=
y
=
90•‹, the interplanar distances for these
examples of crystallographic planes are shown at the bottom of each figure.
A general formula
(Eq.
1.11) for the three orthogonal crystal systems (cubic,
tetragonal and orthorhombic) illustrates dependence of the d-spacing on the
Miller indices of the family and the lengths of the three unit cell edges.
'
In the hexagonal crystal system, a total of four Miller indices are sometimes used to
designate a plane:
(hkil),
where
i
=
-(h
+
k).
See
Figure
1.37
for details.
Fundamentals
of
crystalline state
47
Figure
1.33.
Families of (100) and (200) crystallographic planes.
Figure
1.34.
Family of
(1
10)
crystallographic planes.
The formula shown in
Eq.
1.11 becomes more complicated for non-
orthogonal crystal systems, i.e. hexagonal, monoclinic and especially
triclinic, because inter-axial angles here are different from
90•‹, and should
be included in the calculations. The complete description of the
corresponding mathematical relationships will be given later in the book
(Eqs.
2.29 to 2.37 in section 2.8.1).
Chapter
1
Figure
1.35.
Family of
(771)
crystallographic planes.
Figure
1.36.
Family of
(213)
crystallographic planes.
In
hexagonal and trigonal crystal systems, the fourth index is usually
introduced to address the possibility of three similar choices in selecting the
crystallographic basis as illustrated in
Figure
1.37.
In
addition to the unit cell
based on the vectors a, b and c, two other unit cells, based on the vectors a,
-(a
+
b) and
c,
and -(a
+
b),
b
and c are possible due to the six-fold or the
Fundamentals
of
crystalline state
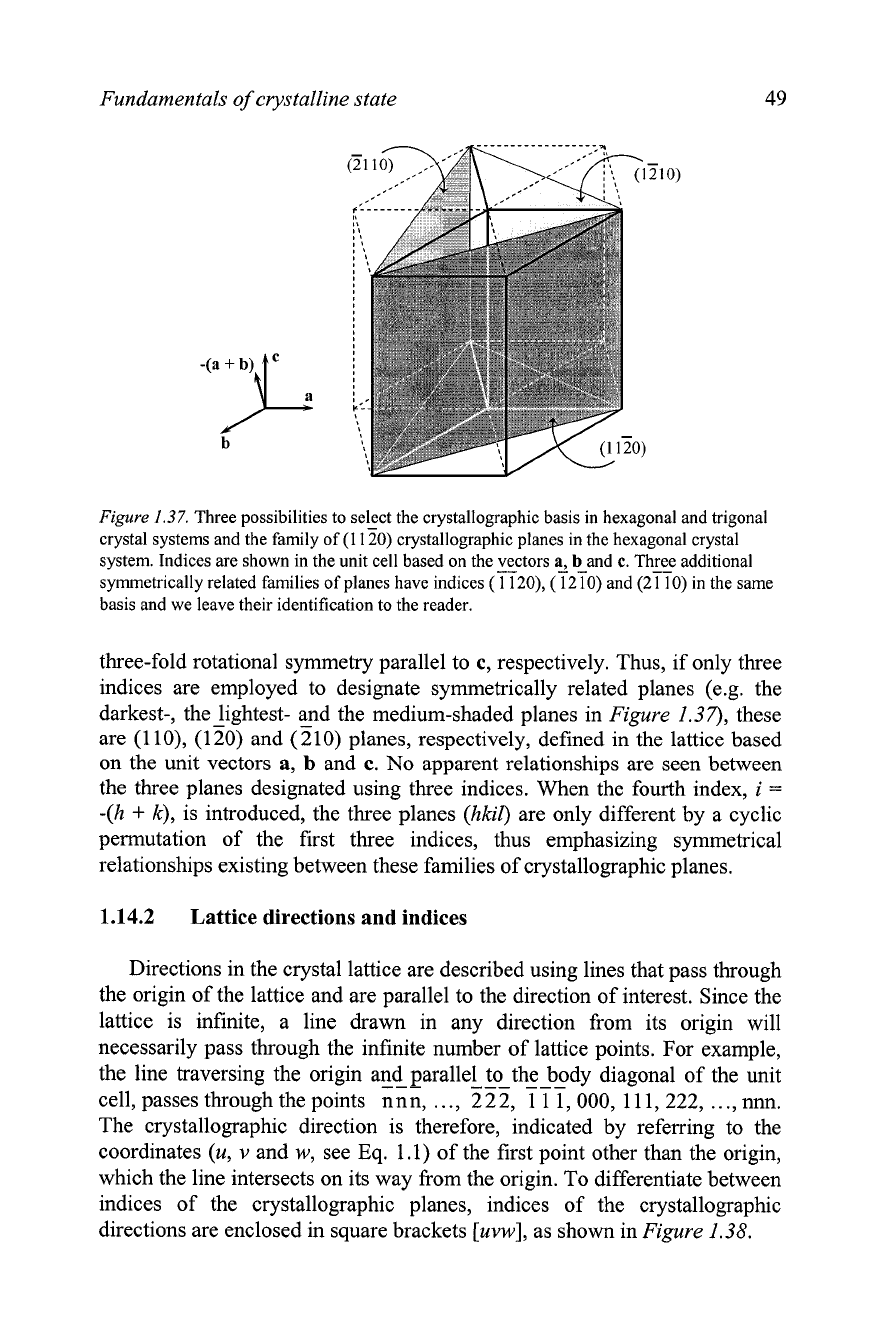
Figure
1.37.
Three possibilities to select the crystallographic basis in hexagonal and trigonal
crystal systems and the family of
(1
120)
crystallographic planes in the hexagonal crystal
system. Indices are shown in the unit cell based on the vectors
a,
b
and
c.
Three additional
symmetrically related families of planes have indices
(ii20), (7210)
and
(2770)
in the same
basis and we leave their identification to the reader.
three-fold rotational symmetry parallel to c, respectively. Thus, if only three
indices are employed to designate symmetrically related planes (e.g. the
darkest-, the lightest- and the medium-shaded planes in Figure 1.37), these
are (1
lo), (120) and (210) planes, respectively, defined in the lattice based
on the unit vectors
a,
b
and c. No apparent relationships are seen between
the three planes designated using three indices. When the fourth index, i
=
-(h
+
k), is introduced, the three planes (hkil) are only different by a cyclic
permutation of the first three indices, thus emphasizing symmetrical
relationships existing between these families of crystallographic planes.
1.14.2
Lattice directions and indices
Directions in the crystal lattice are described using lines that pass through
the origin of the lattice and are parallel to the direction of interest. Since the
lattice is infinite, a line drawn in any direction from its origin will
necessarily pass through the infinite number of lattice points. For example,
the line traversing the origin and parallel to the body diagonal of the unit
---
---
---
cell, passes through the points nnn,
.
. .
,
2 2 2, 1 1 1, 000, 1 1 1,222,
.
.
.
,
nnn.
The crystallographic direction is therefore, indicated by referring to the
coordinates (u, v and w, see Eq. 1 .l) of the first point other than the origin,
which the line intersects on its way from the origin. To differentiate between
indices of the crystallographic planes,
indices of the crystallographic
directions are enclosed in square brackets [uvw], as shown in Figure 1.38.