Parinov I.A. Microstructure and Properties of High-Temperature Superconductors
Подождите немного. Документ загружается.

258 5 General Aspects of HTSC Modeling
7
9
8
26
δ
δ
3
10 4 12
0
1
5
11
Fig. 5.24. Illustration to the definition of thermal stresses at point 0
Then, by using the function ϕ, the normal stresses are calculated as
(σ
x
)
0
=
1
δ
2
(ϕ
2
− 2ϕ
0
+ ϕ
4
); (σ
y
)
0
=
1
δ
2
(ϕ
1
− 2ϕ
0
+ ϕ
3
) . (5.81)
After computation of the thermal stresses, the length of each section at
intergranular boundary is estimated. The mean value of normal stress, acting
on the given section of intergranular boundary, permits to verify the condition
of the boundary microcracking:
σ
n
√
πl ≥ K
0
Ic
, (5.82)
where
σ
n
is the mean value of the normal stress on the intergranular boundary
section with length l; K
0
Ic
is the fracture toughness of ceramic. When for the
section, (5.82) is satisfied, it is replaced by a microcrack. Obviously, in the
first place, microcracks form on the sufficiently long and stressed boundaries.
The microcracking modeling is repeated cyclically together with solution of
heat conduction problem and calculation of thermal stresses.
A simpler scheme of the microcracking modeling on intergranular bound-
aries may be the next. Based on the test data, a critical grain size during
spontaneous cracking, D
S
c
, for considered composition of superconducting ce-
ramic is selected. Assuming, that the grain sizes and facet sizes per grain are
subject to the normal distribution, we obtain [176] D
S
c
≈ 2l
S
c
,wherel
S
c
is the
critical facet size. Taking into account misorientation of grains, a criterion of
microcrack formation at the boundary l is stated [295] as
l/l
S
c
≥ 2/[1 + cos(2Θ
1
− 2Θ
2
)] , (5.83)
where Θ
i
(i =1, 2) is the angle between axis of maximum compression in i-
grain and the boundary plane of the grain. These angles are calculated by
using MonteCarlo procedure [176]. Computational algorithm takes into ac-
count that a microcrack grows from triple junctions (i.e., junctions of three

5.5 Study of Statistical Properties of the Model Structures 259
or four grains at square lattice) [295, 572] or is initiated by pore and stops
at the nearest facet node because the facets are usually subject to internal
compressing stresses [295].
5.5 Study of Statistical Properties
of the Model Structures
The computational approach, presented in Sects. 5.3 and 5.4, is the good base
to investigate the size, quantitative, topological parameters and morphologi-
cal features and also to define structure-sensitive properties of polycrystalline
superconductor. Typical description of ceramic microstructure includes defi-
nition of the size, shape and spatial orientation of the pores and grains. There
are different classifications of materials in the porosity parameters. Another
approach to microstructure description is based on the assumption about its
non-regularity. Either microstructure is estimated by own constant statistical
properties. The void space is correlated with the solid surfaces and forms by
using the grain facets and edges. Architecture of the void space is caused by
the shape, size and mutual disposition of crystallites. The description of solid
matrix characterizes the material space as united whole, including the void
space. Similar approach does not exclude an identification of single spatial
structure elements (e.g., pores, grains, etc.) [794].
HTSC microstructure may be described by integral (i.e., global) parame-
ters, defining joint physical properties. An application of integral characteris-
tics permits to abstain from simplified selection of the grain and pore shapes
and to characterize the material space by using summary values of volume,
surface, curvature, etc., obtained from stereological measurements. Latter es-
timate only global metrics, that is, volume fraction, surface square, length
of linear elements and surface curvature, and also their combined parameters
[513].
The method to define the volume structure characteristics by using mea-
surements in the observation plane has been named by the statistical recon-
struction [145]. It is based on two statistical principles, namely (i) the structure
sample should have representative volume and (ii) a statistical correlation of
the depicted structure characteristics in the observation plane with actual
structure is necessary. Generally, a calculation of necessary number of the
measurements to obtain unbiased estimation of any stereological characteris-
tic is carried out [145]:
n = (200/y)(σ
x
/x) , (5.84)
where y is the accuracy level (%); σ
x
is the average quadratic deviation; x is
the mean value of the stereological characteristic. In the case of given accu-
racy, the number of measurements depends on the variation factor, σ
x
/x,that
characterizes the uniformity of analyzed structure element. The procedure for
the calculation of necessary measurement number includes the following steps:
260 5 General Aspects of HTSC Modeling
(1) the mean value of the stereological characteristic, x, and variance, σ
x
,are
estimated for some random sampling;
(2) it is given a necessary accuracy level (y, %) for the mean value of the
measured magnitude;
(3) the number of measurements, n, is calculated from (5.84) which ensures
the necessary accuracy level.
0
1 20
3 4
0
(a)
(c)
(b)
(d)
1
2
3
δ
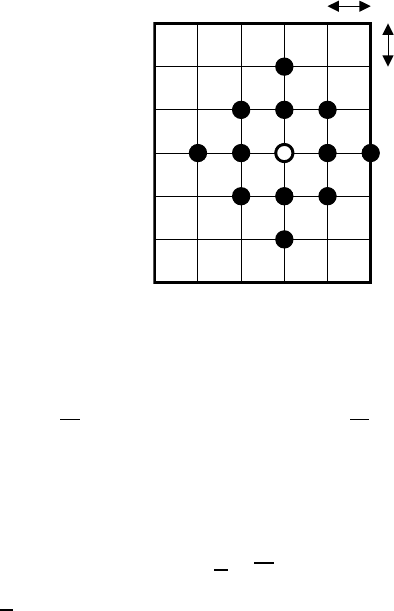
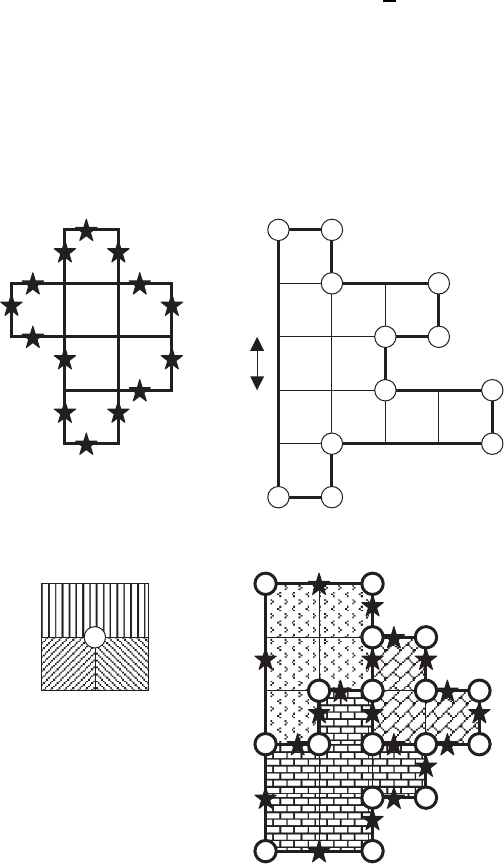
Fig. 5.25. Examples of calculation of some geometrical and topological parameters:
(a) normalized perimeter of grain, L/δ (5.85), n = 7, each from two elements (2, 4)
have two neighbors, element (3) has three neighbors and element (1) has four neigh-
bors: L/δ =3× 7 − (2 × 1+1× 2+1× 3) = 14; (b) number of grain tip (side)
N
l
= 12; (c) triple junction (point of intersection of three grain boundaries in square
lattice); (d) Euler’s relation for polyhedron [145]: G − E + V =1,whereG is the
grain number (3), E is the side number (19), V is the top number (17)
5.6 Modeling of Macrocracks 261
Note that (5.84) is obtained by using central limit theorem of statistics,
according to which average values of characteristic, obtained for representa-
tive samplings, are distributed in the normal law relative to the mean value
for corresponding universe. This approach to define the required number of
measurements is used in the next chapters for study of microstructure and
current-carrying parameters of model superconductors.
A square of single grain or pore is usually estimated by using a detailed
depiction of microstructure. Here, the realized algorithm defines a disposition
of considered grain and computes the total number of its cells. Then, based
on these squares, the proper grain sizes (or radii) are calculated. The grain or
pore perimeter, L, in 2D case of square lattice may be found (normalized to
the elementary cell size, δ)as
L/δ =
⎧
⎨
⎩
2(n +1) n ≤ 2
3n −
4
"
k=2
l
k
(k − 1) n>2
, (5.85)
where n is the cell number of considered grain (or pore), k isthepossiblenum-
ber of nearest neighbors for every cell in 2D case and l
k
is the cell number of
grain (or pore) with k number of neighbors. An example of (5.85) application
is presented in Fig. 5.25a.
5.6 Modeling of Macrocracks
High-temperature superconductors of YBCO or BSCCO are the brittle ma-
terials. Cracks, forming in these materials, as rule, are of I Mode, that is,
fracture (or critical) loading is perpendicular to the crack plane. The cleav-
age planes in HTSC usually correspond to one of the direction of [100] type.
The algorithm for the definition of arbitrary angles, Θ, formed by the normal
to cleavage plane with direction of tensile stresses, based on the method of
arbitrary twisting of cube, is presented in monograph [808]. This algorithm
models a transgranular cracking of HTSC ceramic, using a critical stress con-
dition. In this case, it is suggested that definite grain fraction is fractured,
when the stress normal to cleavage plane σ
n
= σ cos
2
Θ attains critical value
of σ
∗
n
(where σ is the tensile stress). At the σ = σ
∗
n
, the microcrack formation
begins in the grains, where the cleavage planes are perpendicular to the tensile
axis (Θ =0
◦
). The following increase of the stress leads to the crack prop-
agation in the grains, for which 0 <Θ<Θ
∗
,whereΘ
∗
is determined from
the relation σ cos
2
Θ
∗
= σ
∗
n
. When applied stress attains the value of σ
max
,a
grain cracking into cleavage plane occurs. Then, the angle Θ
∗
max
between the
normal to the cleavage plane and tensile direction is obtained as
Θ
∗
max
= arccos(σ
∗
n
/σ
max
)
1/2
. (5.86)
Experimentally observed crack growth in oxide superconductor can take place
as in grain boundaries (intergranular crack growth), as by cleavage through
262 5 General Aspects of HTSC Modeling
grain volume (transgranular crack growth). Moreover, there is a mixed charac-
ter of macrocrack propagation, combining above two fracture types. Moreover,
an existence of pores and microcracks into the material structure renders sig-
nificant influence on crack growth.
Consider a model sample, including layers of rectangular form, N ×M into
units of mean size of the elementary cell, δ. As a first mechanism, transgranular
fracture through grain volume is considered. It is known that in the case of
crack growth arbitrarily oriented to tensile direction, the fracture toughness,
K
Ic
, can be found as [144]
K
Ic
=
K
0
Ic
cos
2
Θ
, (5.87)
where K
0
Ic
=
√
Eγ
0
corresponds to the normal-opening crack, E is Young’s
modulus, γ
0
is the specific surface fracture energy and Θ is the arbitrary angle
between the normal to the crack plane and tension direction.
Assume that there is cleavage crack, crossing crystallites in the planes
of {100}-type. Then, the value of K
(j)
Ic
for crack path along j-line of the
coordinate lattice with length, h
j
, is found as
K
(j)
Ic
=
#
i
K
0
Ic
cos
2
Θ
ij
$
d
ij
h
j
, (5.88)
where d
ij
is the length of i-grain in the j-line and Θ
ij
is the corresponding
arbitrary angle formed by normal to cleavage plane and tension direction.
Mean fracture toughness of the considered region may be estimated as
K
Ic
=
1
N
l
N
l
#
j=1
K
(j)
Ic
, (5.89)
where N
l
is the number of lines in the selected rectangular region without the
lines, including only elements of open porosity.
Then, consider a macrocrack growth along intergranular boundary with-
out microcracks (Fig. 5.26a) and in the existence of microcracks (Fig. 5.26b)
onto the part of the intergranular boundaries. The material fracture tough-
ness, K
Ic
, as function of the specific surface fracture energy, γ
0
, and Young’s
modulus, E, has the form:
K
Ic
=
Eγ
0
. (5.90)
In the case of the rectilinear intergranular boundary, γ
0
= γ
b
,whereγ
b
is
the specific grain boundary energy. In the actual sample, either crack trajec-
tory is the arbitrary broken line. The value of γ
0
can be found through the
ratio of the crack path length, L, to the sample width, h,as
γ
0
= Lγ
b
/h . (5.91)
5.6 Modeling of Macrocracks 263
(a)
(b)
(c)
σ
σ
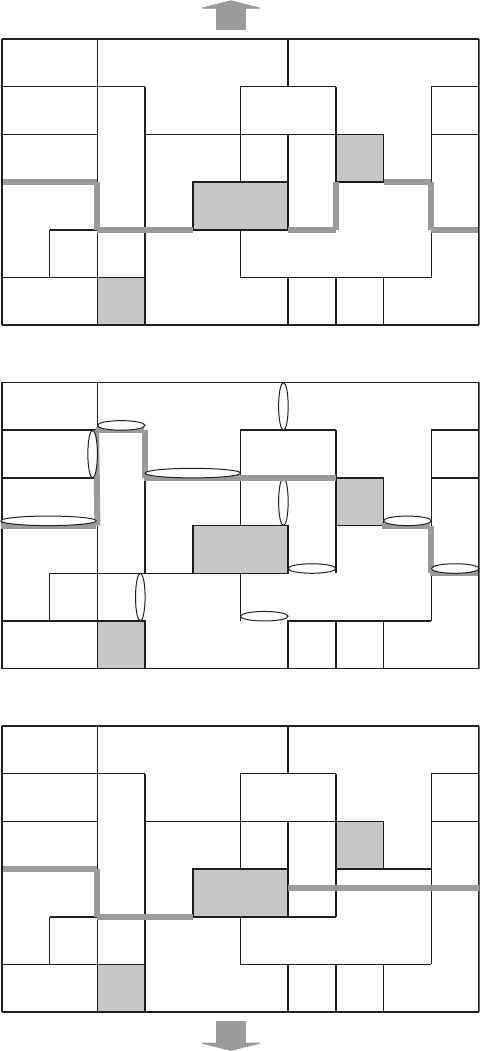
Fig. 5.26. Examples of macrocrack growth, shown by gray line, along intergranular
boundaries in the case of (a) microcracking absence, (b) microcracking presence onto
part of intergranular boundaries and (c) mixed mechanism of macrocrack growth
264 5 General Aspects of HTSC Modeling
In order to compute L, we use a presentation about crack path as on the
graph branch, joining the points at the opposite sides of the model layer. In
this case, the graph branches are constructed, taking into account the inter-
granular boundary lattice. The beginning of the graph tree coincides with
the intersection point of one from intergranular boundaries with the left side
of the sample (see Fig. 5.26). This selection of the crack growth beginning
corresponds to test data, showing that usually a fracture starts from sample
surface. It is clear that a set of the graph tree branches may be selected,
connecting a given point at one side of the layer with arbitrary point at the
opposite side. From the energy minimum condition, a minimum trajectory
corresponds to actual crack path. In order to define this minimum path, the
Bellman-Kalaba’s algorithm is used [562]. In this case, a problem of minimiza-
tion of the numerical (n + 1)-order graph with tips, x
i
, is reduced to solution
of the next equation set:
V
i
=min(V
j
+ C
ij
),i=0, 1 ...,n− 1; j =0, 1 ...,n; i = j
V
n
=0
, (5.92)
where V
i
is the length of optimum path between points of x
n
and x
i
; C
ij
≥ 0
is the value corresponding to the graph arc (x
i
,x
j
). The Bellman-Kalaba’s
algorithm suggests an iteration method for the solution of the minimization
problem (5.92). Supposing V
(0)
i
= C
in
; i =0, 1 ...,n−1; V
(0)
n
= 0, successively
compute
V
(1)
i
=min(V
(0)
j
+ C
ij
); i =0, 1 ...,n− 1; j =0, 1 ...,n; i = j
.........................................................................................
V
(k)
i
=min(V
(k−1)
j
+ C
ij
); i =0, 1 ...,n− 1; j =0, 1 ...,n; i = j
.........................................................................................
V
(k)
n
= 0 (5.93)
up to carrying out of the equalities, V
(k)
i
= V
(k−1)
i
; i =0, 1 ...,n−1. In this
case, the values of V
(k)
i
are the minimum values, which define an optimum
branch of the graph tree. (n−1) iterations are sufficient for its determination.
In the considered case, the graph tips coincide with the lattice nodes dis-
posed in intergranular boundaries. In order to accelerate a sorting out of pos-
sible graph branches, Viterbi’s algorithm is used [72]. Only the graph branches
with length, which is not longer than a given inter-nodal distance, l
j
(or length
of the crack unit jump), are considered. If these paths are to be more than one,
a priority is given to the path with the final tip disposed from the initial one
at maximum distance along the coordinate perpendicular to tensile direction.
The final graph tip, found in this way, corresponds to the crack tip after its
jump; at the same time, this tip is assumed to be initial for the next graph tree,
and so on. In order to optimize the selection process, it is expedient to limit a

5.6 Modeling of Macrocracks 265
number of considered graph tips in accordance with the length of the macroc-
rack unit jump. The region of possible crack unit jumps is shown in Fig. 5.27a.
In order to define a crack path, taking into account ceramic porosity, it is
natural to assume that in the case of the crack hit in a pore, the crack tip
blunts, causing a diminution of stress concentration. In our model, the pointed
drag is depicted by adding the pore boundary length, crossed by the crack,
to the crack length. The normalized boundary length of the pore, L
p
/δ,is
calculated in 2D case using (5.85).
Now, the values of C
ij
used in (5.93) for calculation of the crack path can
be found:
C
ij
=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
0 i = j
L
b
/δ i, jare two nearest nodes at the grain boundary
L
p
/δ i, jbelong to grain boundary of the same pore
∞ in other cases
(5.94)
where C
ij
= C
ji
and L
b
=2δ is the double length of elementary cell side.
Solution of (5.92)–(5.94) defines the whole crack trajectory. The calculation
of fracture toughness for the model sample is carried out as
K
Ic
=
1
N
N
#
i=1
K
(i)
Ic
, (5.95)
where K
(i)
Ic
=
Eγ
(i)
0
; γ
(i)
0
=(L
i
/h
i
)γ
b
and N is the number of considered
crack paths by which an averaging of the fracture toughness is carried out.
Then, consider a model sample of superconducting ceramic, taking into
account microcracks, substituting a part of intergranular boundaries. As it
has been demonstrated, these microdefects can nucleate, in particular due
to residual thermal stresses, caused by the thermal expansion anisotropy of
grains and/or by the deformation mismatch of phases.
It is natural to assume that a microcrack, crossing the macrocrack path,
renders a drag effect if the macrocrack crosses the microcrack at a junction
of two sections of the microcrack (it is not important, with same direction or
disposed at angle). In other cases (i.e., at the macrocrack hit in one of the
microcrack tips), an acceleration of the macrocrack growth occurred. In the
first case, the length of the microcrack surfaces is added to the macrocrack
length. At the same time, in the second case, it is suggested that the macroc-
rack propagates on the whole microcrack length. Hence, relation (5.94) should
be modified as in the following equation:
C
ij
=
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
0 i = j or at favorable disposition of microcrack
L
b
/δ i, j are two nearest nodes at intergranular boundary
L
p
/δ i, j belong to the boundary of the same pore
L
m
/δ at unfavorable disposition of microcrack
∞ in other case
(5.96)
266 5 General Aspects of HTSC Modeling
l
j
l
j
0
0
(a)
(b)
σ
σ
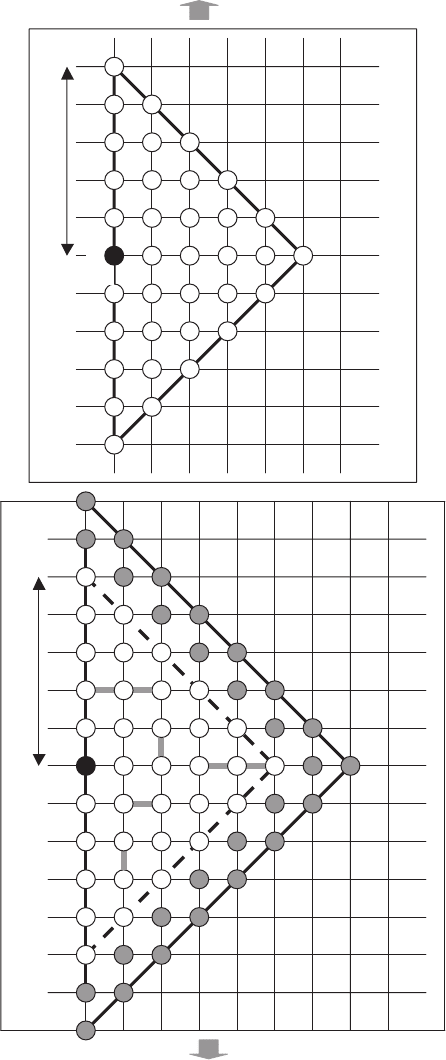
Fig. 5.27. Possible region of macrocrack unit jump during intergranular fracture
(where l
j
is the length of the crack unit jump): (a) boundary microcracking is absent;
(b) part of intergranular boundaries is replaced by microcracks (gray); circles show
considered nodes; additional nodes, caused by the intergranular nicrocracking, are
shown by gray color
5.6 Modeling of Macrocracks 267
In this case, C
ij
= C
ji
and L
m
/δ is the normalized length of the microc-
rack boundary. The microcrack existence leads to a change of the crack unit
jump compared to the case of absence of the grain boundary microcracking
(see Fig. 5.27b). When there are points for favorable growth of the crack,
initially considered region (Fig. 5.27a) should be expanded. The number of
additional layers is found by the maximum summary number of rectilinear
sections of microcracks disposed in one line (or column) of the initial region
(see Fig. 5.27b).
Third mechanism of crack growth is mixed. It implies a possibility of tran-
sition from one fracture mechanism to the other at definite conditions (see
Fig. 5.26c). Here, at either stage, three possible variants of crack growth are
considered (either two intergranular and one transgranular cracks or two trans-
granular and one intergranular cracks) depending on character of the crack
growth at the previous stage. For either from the three competing cracks, the
value of K
Ic
is calculated by using (5.88), (5.89) and (5.95). Then, a minimum
value of K
Ic
states a path of the crack growth at considered stage. Again, a
final crack tip becomes an initial one at the next stage of the crack growth.
The process is continued up to attainment by the crack of opposite side of
the sample or open porosity. The consideration of mixed mechanism is caused
by the replacement of the crack growth character at different sections that is
supported by existing test results for different ceramics [849]. A fabrication of
optimum HTSC microstructures implies an inclusion in the consideration of
proper crack shielding (amplification) mechanisms and the material fracture
resistance. These mechanisms for YBCO and BSCCO ceramics and compos-
ites will be considered in Chaps. 8 and 9.