Островський А.Л., Мороз О.І., Тарнавський В.Л. Геодезія, частина II
Подождите немного. Документ загружается.

обов'язково є аналогічним кодовому сигналу. Ці коди в передавальному та
приймальному пристроях мають бути створені синхронно.
Код, що із сигналами супутника досягає приймача, є зсунутим в часі
відносно коду створеного приймачем. Це так звана репліка коду. Цей зсув
г
юм
€
мірою часу за який сигнал зі супутника досягає антени приймача і є
пропорційним віддалі супутник-Земля. У приймачі проходить порівняння
двох кодів, а точніше, виконується кореляційний аналіз, на основі якого
визначається час г
№и
проходження сигналу від супутника до приймача.
Знаючи т
т<1
, можна знайти виміряну довжину $
вим
за формулою:
5„=с-т
яш
.
(III.
1.3)
Проте, формула
(III. 1.3)
потребує уточнення. Справа в тому, що
супутник і наземний приймач повинні створювати коди в еталонний для
СР8 системи час. Позначимо зсув показу годинника передавача (супутника)
відносно еталонного часу 8 , а відповідний зсув показу годинника прий-
мача 8, . Зареєстрований час розповсюдження ЕМХ може бути описано
таким співвідношенням:
= (V= ^Зт
>
(III. 1.4)
де
т
вим
- час проходження сигналу за годинниками передавача та приймача;
і
пер
та і - моменти часу випромінювання та приймання інформаційного
сигналу відносно показу еталонного годинника ОР8,
т
іст
- і
яр
-
і
пер
-
істинний час проходження сигналом віддалі, 8
Х
= З, - 8
(
- поправка,
викликана несинхронністю ходу годинників на супутнику та наземному
приймачі. Якщо ми будемо користуватись виміряним часом т
вш
, тоді
значення виміряної віддалі
5
&им
визначиться з виразу:
= =с{т
Ісп
+
8
т
)
= 8
іст
+ с8
т
, (НІ.1.5)
де 5
Ісп
- геометрична (істинна) віддаль, яка нас цікавить, дійсна віддаль між
супутником та приймачем. Цю віддаль 5
Ісп
ми зможемо визначити тільки
тоді, якщо будемо знати З
т
- несинхронність ходу годинників на супутнику
та приймальній станції.
Поправковий член с8
г
(III. 1.5)
залежить від стабільності ходу
годинників на віддалених в просторі пунктах і може сягати значних величин
- декілька сотень метрів і більше. Така суттєва відмінність між та 8
кт
привела до введення поняття псевдовіддалі. Це поняття частіше всього
асоціюється саме з кодовими методами віддалемірного вимірювання.
Розглянемо визначення т^ та 5
(им
- псевдовіддалей кодовим мето-
дом більш детально. Оскільки швидкість світла у вакуумі с = 299792458
300
м/с, а супутники літають на висоті « 20000 км, то час проходження коливань
г приблизно дорівнює 0,07 сек. Частота коливань, які випромінює су-
путник, рівна наближено/= 1,6 Гц, отже, період Т становить
Г--^; Т = 6,25-10"
10
сек;
Л
= 18,7см;
А
= ^ = сГ; 5.
Ш4
=N•Л•,
і,о-іи ]
N - число хвиль, що вкладається у віддаль 5
вич
.
За 1 секунду число коливань / = 1,6 ГТц, а за 0,07 секунд число
коливань буде
N = /
•
0,07 = 1,6 ГГц- 0,07 «0,1-Ю
8
.
Як бачимо, число коливань N значне, перевищує 100 мільйонів. Са-
ме для наближеного визначення N використовують кодові вимірювання.
Кожний супутник формує свій псевдовипадковий двійковий код (0;
1), один зразок якого має тривалість (відрізок часу від початку
випромінювання коду до кінця) дещо більшу від 0,07 сек, тобто, більший за
час подолання радіохвилями віддалі від супутника до наземного приймача.
Цей зразок безперервно повторюється і змішується з коливаннями, які
випромінює супутник.
Код має значно меншу частоту ніж коливання, які випромінює
передавач ШСЗ. Але код і коливання є синхронними, тому що і код і
коливання формуються з коливань, які випромінює основний генератор
супутника. У приймачі створюється код, аналогічний до того, що
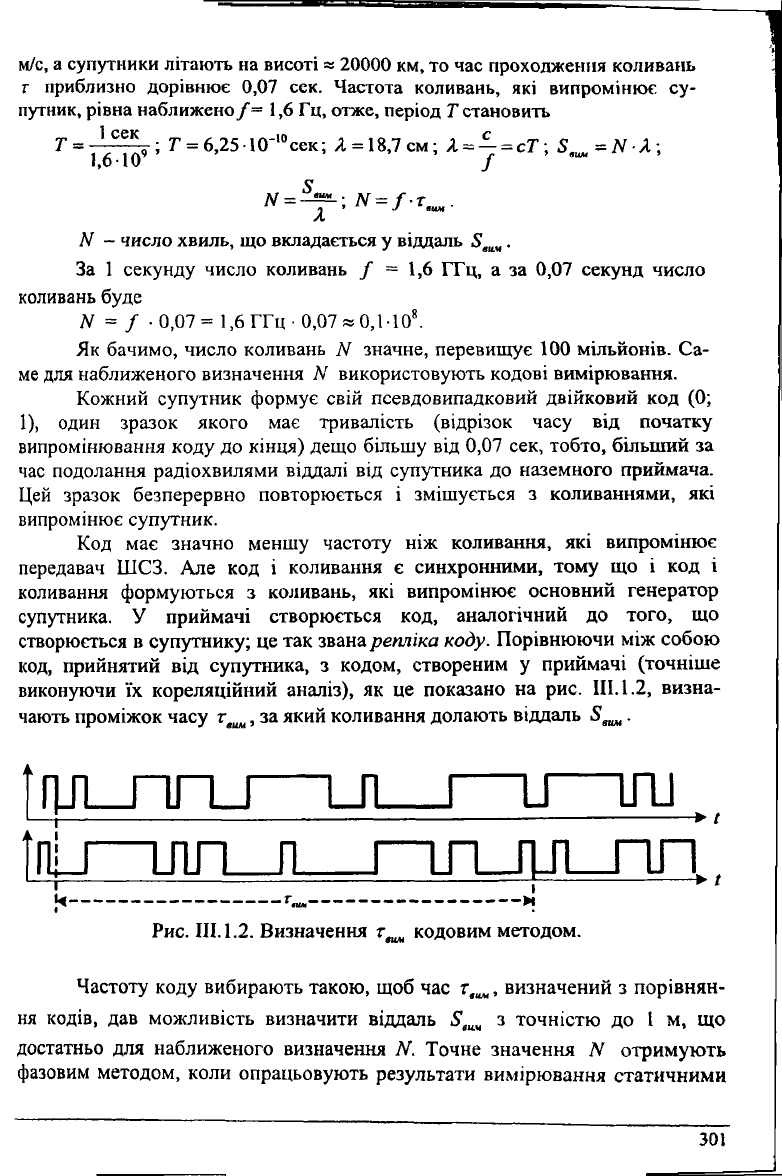
створюється в супутнику; це так звана репліка коду. Порівнюючи між собою
код, прийнятий від супутника, з кодом, створеним у приймачі (точніше
виконуючи їх кореляційний аналіз), як це показано на рис.
III.
1.2, визна-
чають проміжок часу
т
вим
,
за який коливання долають віддаль 5
ЯИ(
.
"гіл-пти—іл і—и іти,
"піі—^лг1_^^__^~лл-^^і^-^^^1л'
і і
Ц г_ м
Рис. III. 1.2. Визначення т^ кодовим методом.
Частоту коду вибирають такою, щоб час т,
ш
, визначений з порівнян-
ня кодів, дав можливість визначити віддаль з точністю до 1 м, що
достатньо для наближеного визначення N. Точне значення N отримують
фазовим методом, коли опрацьовують результати вимірювання статичними
301
методами, що вимагає збільшення часу спостережень. Таким чином, кодо-
вий метод за своїми показниками точності суттєво поступається перед фазо-
вим. Цьому методу відводять лише допоміжну роль (наприклад, наближене
визначення координат точок стояння приймача).
Фазові визначення. У геодезичному використанні супутникових
систем найбільшу зацікавленість мають фазові методи, що базуються на
застосуванні (в якості інформаційних сигналів) передавальних, гармонічних
коливань дециметрового діапазону радіохвиль. Як ми вже знаємо з розділу
II, (с/в вимірювання) такі коливання описуються в загальному вигляді
аналітичним співвідношенням наступного вигляду:
у = Л5Іп(й)і +
<р
0
),
(111,1.6)
де А - амплітуда коливань, а - кутова частота;
1
- еталонний час системи
СРЗ (тобто, синхронний час для супутника та приймача), <р
0
- початкова
фаза.
Головним параметром, що використовується для фазового відцале-
мірного вимірювання, в рівнянні (III. 1.6) є вираз, що стоїть під знаком
тригонометричної функції і який має назву поточної фази :
<р
{і)
=й)1
+
<р
0
, (III.
1.7)
Як відомо, фаза
(р
-
т
і, де а - кругова частота, при цьому
со
= —,
а
Т - період коливань, або
й>
= 2л/\ де/- частота коливань. Фаза
<р,
як
правило, вимірюється в кутових одиницях (в градусах, або радіанах). Але
під час супутникового вимірювання для спрощення обчислювальних про-
цесів фазу виражають у відносних одиницях (в частинах фазового циклу),
тобто, визначають, скільки разів в фазі
<р
вкладається 2/г.
Фазу у відносних одиницях позначають Ф:
<Р
(1
)
_а>і _ 2 ф
2 7Г 2тг 2л
Найбільш негативною особливістю фазового вимірювання є те, що
фазометр дозволяє визначати різницю фаз тільки в межах одного фазового
циклу (в межах 2л). Насправді величина Ф багатократно перевищує 2яг.
Виходячи з цього, параметр Ф^ записують так:
Ф
(/)
=
ЛГ
+ ДФ, (III. 1.9)
де М- число циклів; ЛФ = Д/У - частина циклу.
Повернемося до формули (III.1.7). Ця формула з врахуванням фор-
мули
(III. 1.8)
може бути подана у вигляді:
Ф(,) = /' + Ф
0
, (НІ. 1.Ю)
Зауважимо, що під час супутникових спостережень початкову фазу
Ф
0
прийнято розглядати
як
зміну фази за час 6\-8
х
-8
(
. Тому:
= =
(III. 1.8)
302
Ф
в
= /Л. (ПІ.1.11)
де
<5
Т
- асинхронність годинників супутника та приймача.
У такому розумінні початковий фазовий зсув може перевищувати
величину, що відповідає одному циклу. Виходячи з цього, цей зсув розгля-
дають одночасно з величиною И, яка також є зсувом поточної фази коли-
вань, що прийшла від супутника на вхід наземного приймача.
З врахуванням цих зауважень поточна фаза передавальних коливань
може бути записана в такій аналітичній формі:
= (Ш.1.12)
де Ф'„
ер
{,) - поточна фаза передавальних коливань (в мить випромінювання),
що йдуть від передавача супутника на вхід приймача; / - номінальне зна-
чення передавальної частоти;
т
вим
= —— - час проходження передавальними
с
коливаннями шуканої віддалі; 8, - зсув в показах годинника передавача,
встановленого на супутнику, викликаний нестабільністю його роботи на
момент виконання вимірювання. Знак "-", оскільки випромінювання з
супутника випереджують на г збурення коливань в приймачі.
Відповідно для поточної фази збурених в приймачі опорних
коливань, будемо мати:
+/*,„• (пі.і.13)
Різниця фаз А Ф, на основі якої обчислюється шукана віддаль до
супутника, знайдеться зі співвідношення:
лф=Ф'М,-Ф„
р{і)
«- <д. (ш. і.і4)
Знак "-" перед першим членом в правій частині рівняння (III. 1.14)
викликаний тим, що в супутникових системах в якості "стартових" сигналів
під час цифрового фазового вимірювання найчастіше використовують
сигнали, що надходять від супутника і які через запізнення мають від'ємний
фазовий зсув. В якості сигналу "стій" виступає сигнал, що формується
місцевим генератором приймача.
Оскільки 8
Т
- 8^ -8, , то -8
Х
- 8,^ -8^. Тому формулу (Ш.1.14)
можна записати ще так:
Кінцево ця формула матиме вигляд:
АФ = (III. 1.15)
З врахуванням знака "-" формулу (III. 1.9) запишемо так:
Ф
(/)
=#-ДФ. (III. 1.16)
Комбінуючи формули (III. 1.15) та (III. 1.16) та попередньо позначив-
ши Ф
(()
через ДФ, отримаємо:
303
А<Р
= /*•„.+* +А,
(III.
1.17)
де АФ - виміряне значення зміни фази;/- номінальне значення масштабної
(передавальної) частоти; N - ціле число періодів зміни фази за час проход-
ження радіосигналом віддалі від супутника до приймача; 8
Т
= 8,^ - 8,^ -
по-
правка, викликана иесинхронністю ходу годинників на супутнику та прий-
мачі.
Враховуючи те, що г
№и
= , рівняння, яке зв'язує виміряну
с
різницю фаз ДФ з величиною шуканої віддалі 5
вим
, запишемо в такому
вигляді:
ДФ = -Я.
Ш
, + К+/8
Т
.
(III. 1.18)
с
Формула
(III. 1.18)
є основною формулою для односторонніх супут-
никових відцалемірних систем. Враховуючи, що / = ~г> ти формулі можна
Л
ще
надати
дещо іншого вигляду:
д
Ф
= (ІН.1.19)
Рівняння (III.1.18),
(III. 1.19)
називають рівняннями псевдовіддапей.
II1.1.4. Абсолютні
та
відносні
методи супутникового вимірювання
Як видно із попереднього, головним параметром координатних
вимірів є віддаль між супутником та приймачем.
У залежності від мети задач, що розв'язуються, розрізняють абсо-
лютні
і
відносні
(диференційні) методи координатних визначень. У першому
випадку поставлена задача може бути розв'язана на основі використання
одного, окремо працюючого супутникового приймача. У другому випадку,
під час диференційного методу, використовується два або більше одночасно
працюючих приймачів, встановлених на віддалених пунктах місцевості,
координати яких визначаються.
Кожну виміряну псевдовіддаль від приймача до супутника можна
вважати радіусом сфери, в центрі якої знаходиться супутник, а приймач
знаходиться на поверхні цієї сфери. Побудуємо другу сферу, радіус якої
рівний другій псевдовіддалі, тоді в центрі цієї другої сфери знаходиться
другий супутник. Тоді приймач буде знаходитися на перетині кривих
поверхонь двох сфер. Для визначення просторового положення приймача
потрібно виміряти ще одну псевдовіддаль до третього супутника і
побудувати третю сферу, Точка, в якій перетнуться поверхні трьох сфер, і
буде точкою положення приймача. Таким чином, для визначення просто-
рового положення приймача потрібно разом розв'язати три рівняння сфер:
= ^~хУ+Ь>,-уУ+(г,-2У ,
(Ш. 1.20)
304 ~ ~
де - віддаль до і -того супутника х,, у,, г, - відомі координати і -того
супутника, і = 1, 2, 3, х,у,г- шукані координати приймача.
Фактично, оскільки присутня асинхронність хронометрів, запишемо:
= ~х)
2
+
(
Уі
-
У
)
2
(III.
1.21)
Величини 5, та 8, - відхилення годинників наземного приймача
"Р 'пг/І
та супутникового передавача від еталонного часу ОРЗ. Значення 5, для
кожного супутника визначається станціями спостережень за супутниками,
які входять в сектор керування і контролю та передається в складі
навігаційних даних кожному користувачу. Будемо поки-що вважати
величини 8, відомими. Але невідомими залишаються 8, - зсуви годин-
'пер 'пр
ника приймача. Тому в рівнянні
(III.
1.21) чотири невідомих х, у, г та 8^ .
Саме тому для розв'язання задачі координування потрібно спосте-
рігати, як мінімум, 4 супутники.
Розглянутий випадок, коли за допомогою одного приймача та
чотирьох супутників визначають координати однієї точки, де встановлено
приймач, є абсолютним методом.
Для визначення потенційної точності абсолютного методу необхідно
виконати оцінку впливу окремих джерел похибок, властивих цьому методу.
По-перше, відзначимо, що є координати супутника, тобто його ефемериди,
що передаються радіоканалами користувачам, характеризуються похибками
на метровому рівні точності. Корегування годинників супутників, тобто
визначення 8. також не є без похибок. Найбільш суттєво впливає атмо-
'"гр
сфера, особливо її іоносферні прошарки, через які проходять радіохвилі.
Впливає на швидкість розповсюдження радіохвиль і тропосфера, багато-
шляховість, шуми приймача.
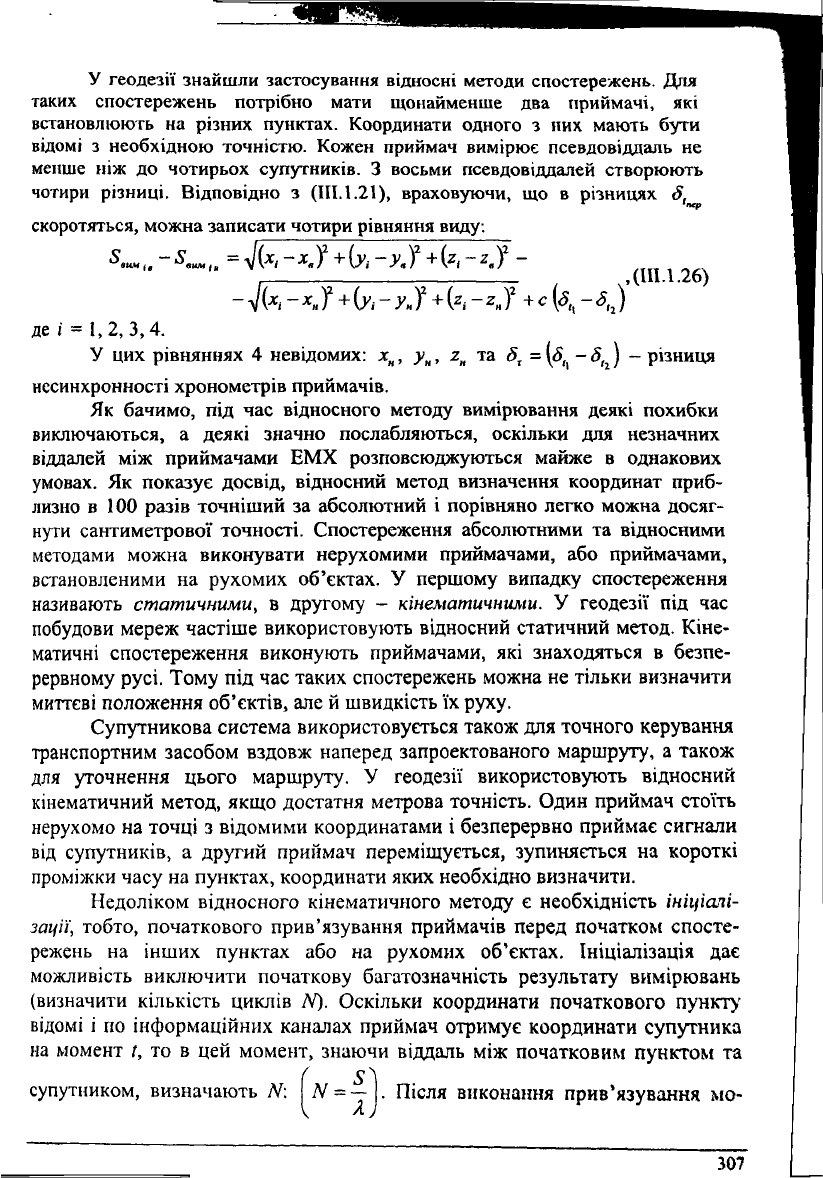
Кількісна оцінка всіх перерахованих похибок абсолютного методу,
що базується на кодових методах, подана в табл.
III.
1.1. Якщо всі ці похибки
вважати випадковими, то їх сумарний вплив складає, наближено, 8 метрів.
Таблиця III. 1.1
Кількісні величини похибок
№ п/п
Джерело похибок
Величина похибок С/А коду, м
1
Іоносфера
7,0
2
Тропосфера
0,7
3
Багатошляховість
1,2
4
Шуми приймача
1,5
5
Координатно-часове
забезпечення супутників
3,6
Сумарна похибка
8.1
305
•Я»/..
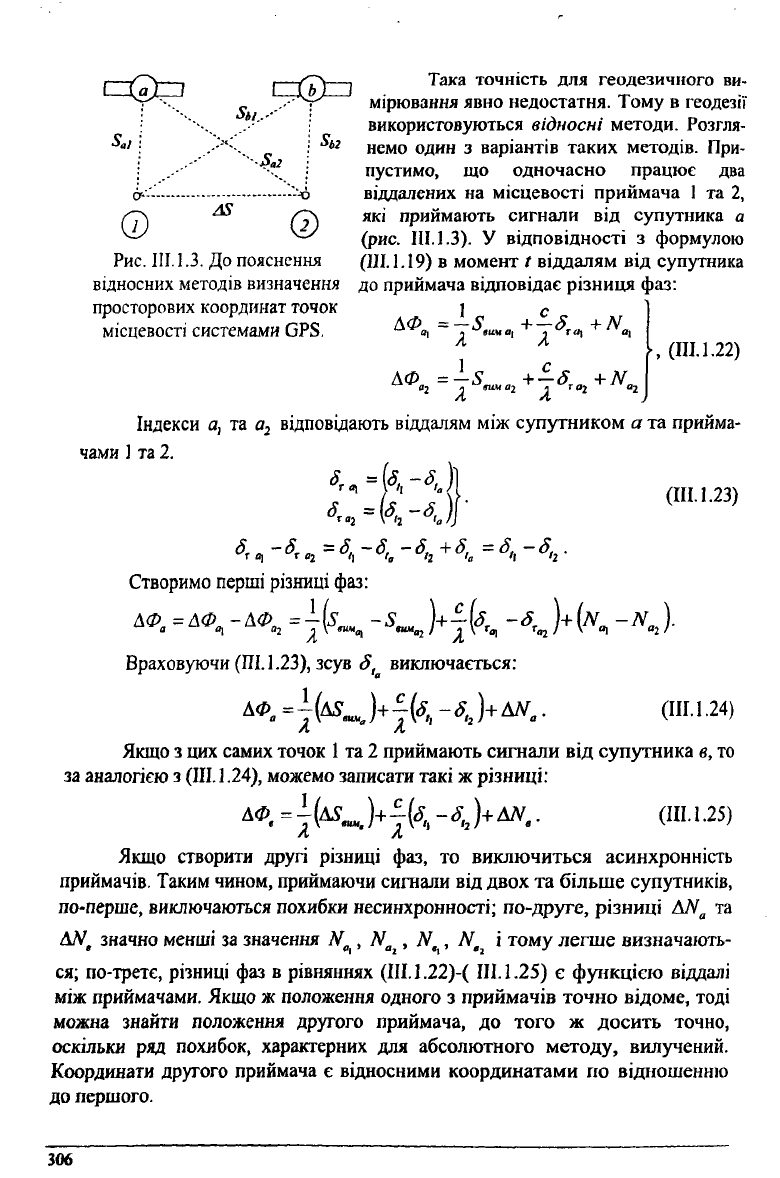
г—ґ^у—і Така точність для геодезичного вн-
- ^ мірювання явно недостатня. Тому в геодезії
використовуються відносні методи. Розгля-
немо один з варіантів таких методів. При-
пустимо, що одночасно працює два
віддалених на місцевості приймача 1 та 2,
які приймають сигнали від супутника а
(рис.
III.
1.3). У відповідності з формулою
(111.1.19) в момент І віддалям від супутника
відносних методів визначення до приймача відповідає різниця фаз:
просторових координат точок _ ]
с
© " ®
Рис. III. 1.3. До пояснення
місцевості системами 6Р8. ~ д ^гимщ
+
д ^т«,
+
, (III. 1.22)
(Ш.1.23)
Індекси а, та а
2
відповідають віддалям між супутником а та прийма-
чами
1
та 2.
Створимо перші різниці фаз:
Враховуючи (Ш.1.23), зсув д, виключається:
(III.
1.24)
Якщо з цих самих точок
1
та 2 приймають сигнали від супутника в, то
за аналогією з
(III.
1.24), можемо записати такі ж різниці:
Щ (III. 1.25)
Якщо створити другі різниці фаз, то виключиться асинхронність
приймачів. Таким чином, приймаючи сигнали від двох та більше супутників,
по-перше, виключаються похибки несинхронності; по-друге, різниці АИ
а
та
АЛ
Г
<
значно менші за значення А^, Л^, ЛГ, Л^ і тому легше визначають-
ся; по-третє, різниці фаз в рівняннях (ІІІ.1.22)-( III. 1.25) є функцією віддалі
між приймачами. Якщо ж положення одного з приймачів точно відоме, тоді
можна знайти положення другого приймача, до того ж досить точно,
оскільки ряд похибок, характерних для абсолютного методу, вилучений.
Координати другого приймача є відносними координатами по відношенню
до першого.
306
У геодезії знайшли застосування відносні методи спостережень. Для
таких спостережень потрібно мати щонайменше два приймачі, які
встановлюють на різних пунктах. Координати одного з них мають бути
відомі з необхідною точністю. Кожен приймач вимірює псевдовіддаль не
менше ніж до чотирьох супутників. З восьми псевдовіддалей створюють
чотири різниці. Відповідно з (III.1.21), враховуючи, що в різницях 8,
скоротяться, можна записати чотири рівняння виду.
~^= 4(
х
і~
х
Л +ІУІ~УЛ ~
ДІИ.І./о)
-^-ХЛ + ІУі-УЛЛ^Л
+
с(<5„-8
Іг
)
де і = 1,2,3,4.
У цих рівняннях 4 невідомих: х
н
, у
н
, г
н
та 8
Т
= (<5
(і
-8,
г
) - різниця
несинхронності хронометрів приймачів.
Як бачимо, під час відносного методу вимірювання деякі похибки
виключаються, а деякі значно послабляються, оскільки для незначних
віддалей між приймачами ЕМХ розповсюджуються майже в однакових
умовах. Як показує досвід, відносний метод визначення координат приб-
лизно в 100 разів точніший за абсолютний і порівняно легко можна досяг-
нути сантиметрової точності. Спостереження абсолютними та відносними
методами можна виконувати нерухомими приймачами, або приймачами,
встановленими на рухомих об'єктах. У першому випадку спостереження
називають статичними, в другому - кінематичними. У геодезії під час
побудови мереж частіше використовують відносний статичний метод. Кіне-
матичні спостереження виконують приймачами, які знаходяться в безпе-
рервному русі. Тому під час таких спостережень можна не тільки визначити
миттєві положення об'єктів, але й швидкість їх руху.
Супутникова система використовується також для точного керування
транспортним засобом вздовж наперед запроектованого маршруту, а також
для уточнення цього маршруту. У геодезії використовують відносний
кінематичний метод, якщо достатня метрова точність. Один приймач стоїть
нерухомо на точці з відомими координатами і безперервно приймає сигнали
від супутників, а другий приймач переміщується, зупиняється на короткі
проміжки часу на пунктах, координати яких необхідно визначити.
Недоліком відносного кінематичного методу є необхідність ініціалі-
зації, тобто, початкового прив'язування приймачів перед початком спосте-
режень на інших пунктах або на рухомих об'єктах. Ініціалізація дає
можливість виключити початкову багатозначність результату вимірювань
(визначити кількість циклів /V). Оскільки координати початкового пункту
відомі і по інформаційних каналах приймач отримує координати супутника
на момент (, то в цей момент, знаючи віддаль між початковим пунктом та
супутником, визначають №. [ = Після виконання прив'язування мо-
307
більшій приймач постійно реєструє зміни N та інших вимірюваних величин,
тому потрібний безперервний зв'язок приймача з супутником.
III.
1.5. Основні відомості про параметри орбіт супутників
У супутникових системах, як ми вже знаємо, носіями координат є
ШСЗ, які рухаються своїми орбітами. Тому точки орбіти, в яких знаходяться
супутники, і є координатами супутників. Слід пам'ятати, що ці координати
супутники мають тільки у визначені митті часу. Тому параметри орбіти і
параметри роботи хронометрів повинні бути точно узгоджені. Ці параметри
весь час контролюють наземні станції сегменту керування. Значення пара-
метрів з наземних станцій керування періодично передають на ШСЗ, а супут-
ники, у свою чергу, пересилають їх кожному приймачу. Важливо знати за-
кони руху ШСЗ, значення основних параметрів орбіт та роботи хронометрів.
Якщо Землю вважати однорідним тілом, тоді рух супутників навколо
Землі описується законами Кеплера. Для супутників Землі ці закони можна
сформулювати так:
• орбітою супутника є еліпс, в одному з центрів якого знаходиться
Земля;
• радіус-вектор супутника (лінія, яка з'єднує центр Землі з супутником)
за рівні проміжки часу описує рівні площі;
• відношення квадратів періодів обертання двох супутників дорівнює
відношенню кубів великих півосей орбіт супутників.
Рівняння руху супутників отримують, виходячи з закону всесвітнього
тяжіння Ньютона. Воно є векторним рівнянням другого порядку з шістьма
сталими інтегрування. Рух супутників відносно Землі має 6 степенів свободи
і тому його визначає шість основних параметрів орбіти.
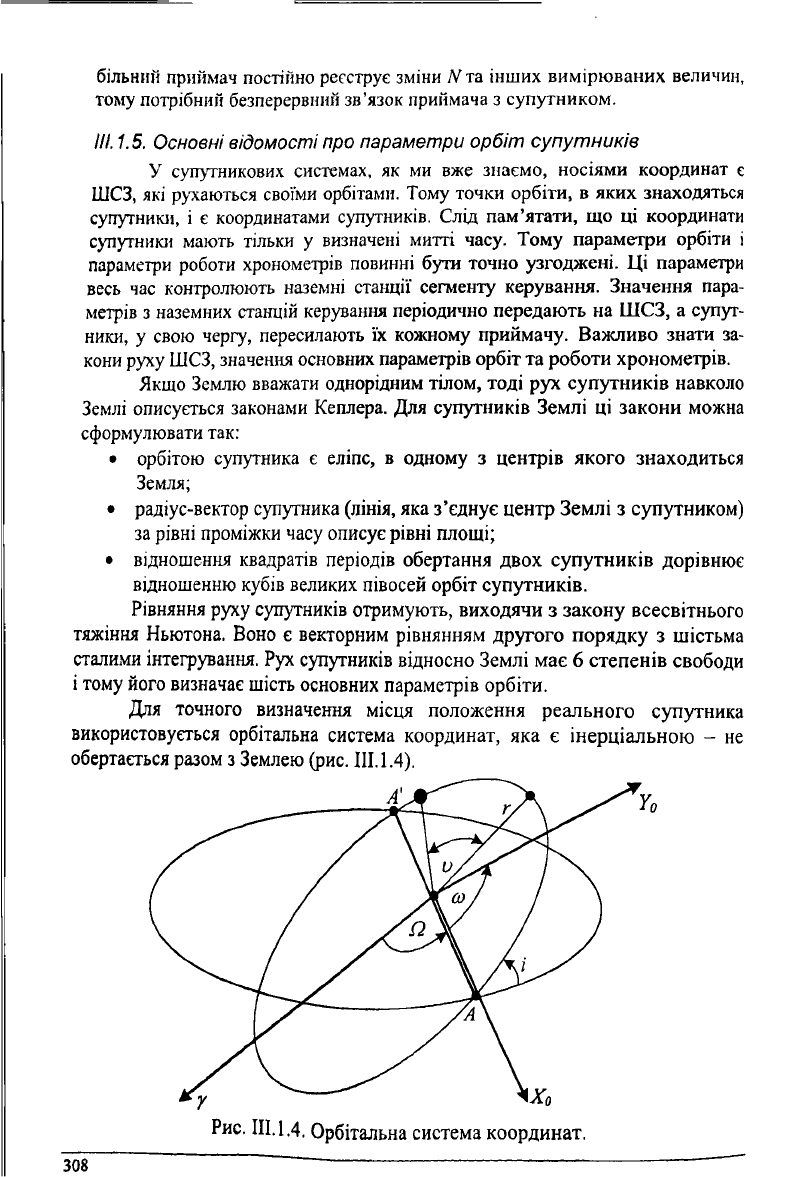
Для точного визначення місця положення реального супутника
використовується орбітальна система координат, яка є інерціальною - не
обертається разом з Землею (рис.
III.
1.4).
308
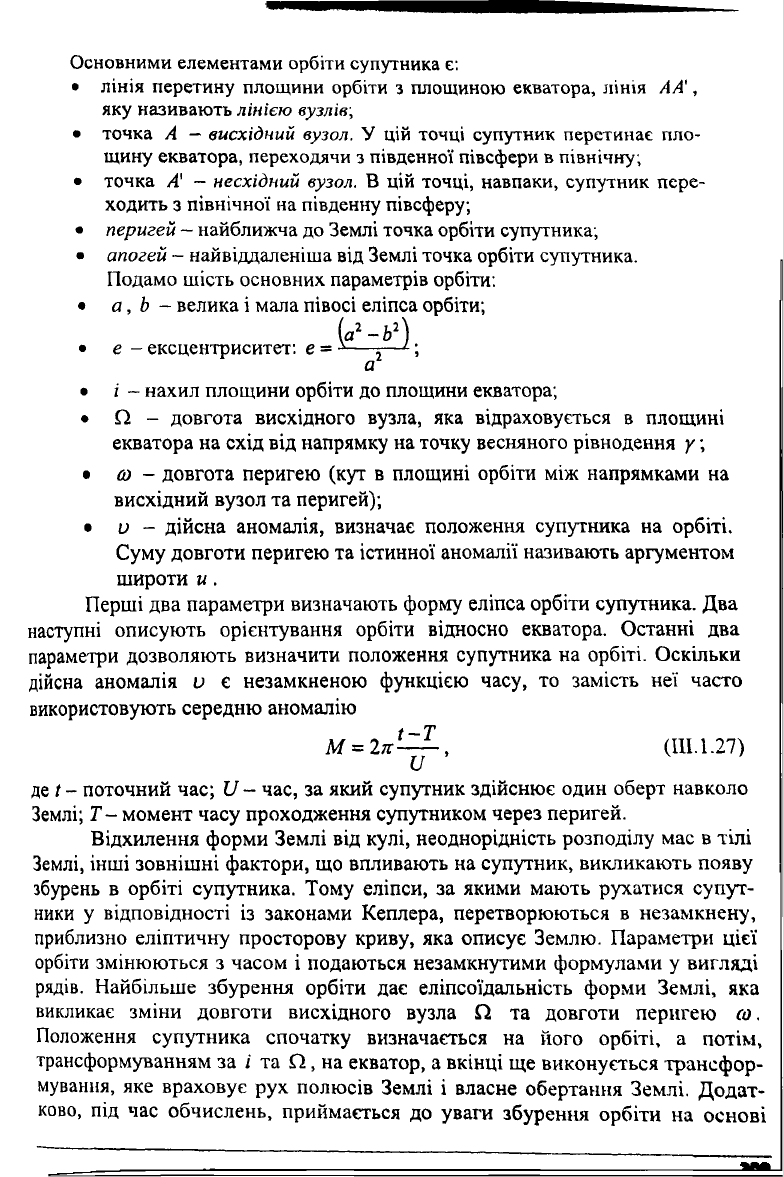
Основними елементами орбіти супутника є:
• лінія перетину площини орбіти з площиною екватора, лінія А А',
яку називають лінією вузлів;
• точка А
—
висхідний вузол. У цій точці супутник перетинає пло-
щину екватора, переходячи з південної півсфери в північну;
• точка А' - нєсхідний вузол. В цій точці, навпаки, супутник пере-
ходить з північної на південну півсферу;
• перигей - найближча до Землі точка орбіти супутника;
• апогей - найвідцаленіша від Землі точка орбіти супутника.
Подамо шість основних параметрів орбіти:
• а, Ь - велика і мала півосі еліпса орбіти;
(а
г
-Ь
2
)
• е - ексцентриситет: е = *—г—
1
;
а
• і - нахил площини орбіти до площини екватора;
• О - довгота висхідного вузла, яка відраховується в площині
екватора на схід від напрямку на точку весняного рівнодення у;
• а> - довгота перигею (кут в площині орбіти між напрямками на
висхідний вузол та перигей);
• и - дійсна аномалія, визначає положення супутника на орбіті.
Суму довготи перигею та істинної аномалії називають аргументом
широти и.
Перші два параметри визначають форму еліпса орбіти супутника. Два
наступні описують орієнтування орбіти відносно екватора. Останні два
параметри дозволяють визначити положення супутника на орбіті. Оскільки
дійсна аномалія и є незамкненою функцією часу, то замість неї часто
використовують середню аномалію
М = 2тг—, (III. 1.27)
V
де І - поточний час; II - час, за який супутник здійснює один оберт навколо
Землі; Г- момент часу проходження супутником через перигей.
Відхилення форми Землі від кулі, неоднорідність розподілу мас в тілі
Землі, інші зовнішні фактори, що впливають на супутник, викликають появу
збурень в орбіті супутника. Тому еліпси, за якими мають рухатися супут-
ники у відповідності із законами Кеплера, перетворюються в незамкнену,
приблизно еліптичну просторову криву, яка описує Землю. Параметри цієї
орбіти змінюються з часом і подаються незамкнутими формулами у вигляді
рядів. Найбільше збурення орбіти дає еліпсоїдальність форми Землі, яка
викликає зміни довготи висхідного вузла Г2 та довготи перигею со.
Положення супутника спочатку визначається на його орбіті, а потім,
трансформуванням за і та Сі., на екватор, а вкінці ще виконується трансфор-
мування, яке враховує рух полюсів Землі і власне обертання Землі. Додат-
ково, під час обчислень, приймається до уваги збурення орбіти на основі