Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.

ного состояния с помощью регулятора Reg, можно регулировать среднюю ве-
личину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзистор-
ного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с.
статора отставал от вектора потока ротора. Для этого нужно изменить U
1
до
значения U
1
<Е
я
. Тогда момент двигателя станет отрицательным. Поскольку на
входе преобразователя установлен неуправляемый выпрямитель, то реку-
перация энергии торможения в сеть в данной схеме невозможна. При торможе-
нии происходит подзаряд конденсатора фильтра С. Ограничение напряжения
на конденсаторах осуществляется путем подключения разрядного сопротивле-
ния через транзистор VT7. Таким образом, энергия торможения рассеивается в
разрядном
сопротивлении.
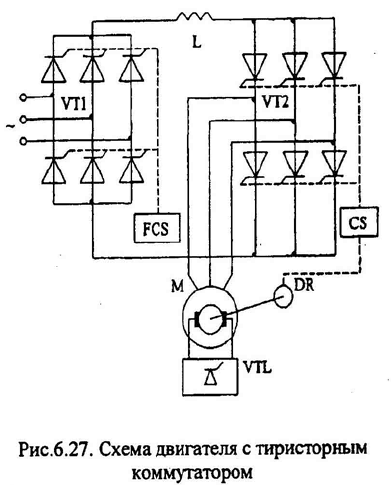
6.6.2. Электропривод по системе тиристорный коммутатор -
синхронный двигатель
В вентильном двигателе средней и
большой мощности обычно используются
синхронные двигатели обычной конструкции
с электромагнитным возбуждением.
Поскольку двигатели большой мощности
имеют напряжение статора 6,0 или 10,0кВ, то
в качестве вентильного коммутатора
используется тиристорный преобразователь,
состоящий из управляемого выпрямителя VT
1
и инвертора VT
2
(см. рис.6.27). Инвертор
выполняет функции коммутатора, переключение которого производится от
датчиков положения ротора DR. Поскольку тиристоры являются полууправ-
ляемыми приборами, то инвертор работает, как зависимый, коммутируемый за
счет э.д.с. двигателя, наводимой в обмотках статора вращающимся электромаг-
нитным полем ротора. Для обеспечения устойчивой коммутации вентилей ин-
вертора предусматривается опережение угла их открывания на угол β, который
составляет не менее 15°, что ведет к некоторому уменьшению момента вен-
тильного двигателя
)sin(
10
β
θ
−
= IкФМ . Возбуждение двигателя осуществляется
возбудителем VTL.
Благодаря включению в цепь постоянного тока дросселя L со значи-
тельной величиной индуктивности, преобразователь VT1-VT2 работает как ис-
точник тока, величина которого регулируется путем импульсно-фазового регу-
лирования выходного напряжения выпрямителя VT1
экв
cсх
R
кФaUк
I
ω
0
1
cos
−
=
где: R
экв
- эквивалентное сопротивление цепи обмоток статора;
U
c
- напряжение питания выпрямителя;
Ф
0
- поток ротора, создаваемый обмоткой возбуждения.
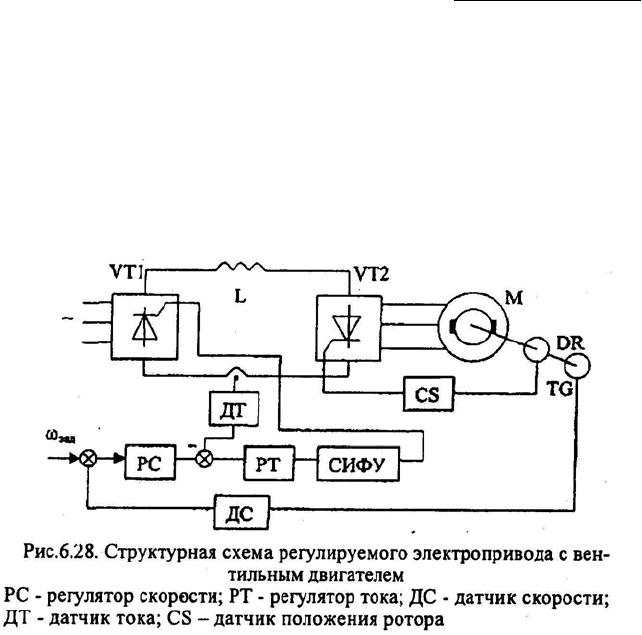
Регулируя величину тока, можно изменять момент, развиваемый дви-
гателем. Регулирование
скорости в приводах
рассматриваемого типа
обычно производится
введением внешнего кон-
тура регулирования
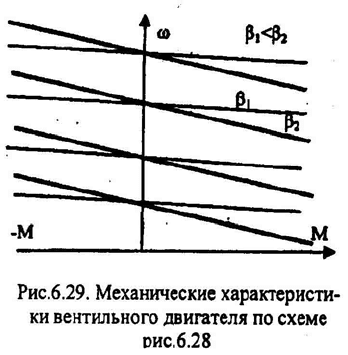
скорости (рис. 6. 28). При
этом механические
характеристики
вентильного двигателя (см. рис. 6.29) будут подобны характеристикам системы
ТП-Д.
Поскольку в данной схеме входной выпрямитель принят
управляемым,
то возможен режим рекуперативного торможения, когда э.д.с. двигателя
β
ω
coscos
0
⋅〉 aUккФ
cсх
.
Определенным недостатком рассматриваемой схемы является усложне-
ние коммутации тиристоров инвертора при малых скоростях (ниже 0,1ω
н
), т.к.
при этом э.д.с. двигателя становится
недостаточной для естественной коммутации
вентилей зависимого инвертора. В этом случае,
при пуске двигателя до скорости 0,1ω
н
для обес-
печения запирания вентилей инвертора прихо-
дится прерывать ток, запирая тиристоры вы-
прямителя, что усложняет схему его управления.
В последние годы с появлением IGB-
транзисторов и запираемых тиристоров стали применять схемы с принудитель-
ной коммутацией вентилей инвертора, что повышает регулировочные свойства
вентильного
двигателя и дает возможность его использования для динамичных
электропри-
водов с широким диапазоном регулирования скорости.
6.7. Контрольные вопросы для самопроверки
1. Приведите классификацию способов регулирования асинхронных
двигателей.
2. При каких способах регулирования асинхронный двигатель работает
с малыми значениями скольжения?
3. Для чего используется введение добавочных сопротивлений в цепь
ротора асинхронного двигателя с фазным ротором?
4. Какое число рабочих скоростей может иметь
многоскоростной асин-
хронный двигатель?
5. Какой основной недостаток характерен для способа регулирования
скорости асинхронного двигателя при изменении величины питающего напря-
жения?
6. При каком способе регулирования асинхронный двигатель работает с
большими значениями скольжения, однако этот способ является экономичным?
7. В каких единицах измеряется абсолютное скольжение асинхронного
двигателя?
8. Почему при уменьшении частоты питающего напряжения ниже но-
минальной необходимо одновременно регулировать величину напряжения?
9. Каковы соотношения между частотой и величиной питающего на-
пряжения при частотном регулировании асинхронного двигателя?
10.Как сказывается падение напряжения на активном сопротивлении
обмоток статора на механические характеристики асинхронного двигателя при
частотном регулировании?
11.Как изменится (по сравнению
с номинальным) длительно допусти-
мый момент асинхронного двигателя, если увеличивать частоту напряжения
выше номинальной, сохранив величину напряжения, равной номинальной?
12.Приведите классификацию полупроводниковых преобразователей
частоты, используемых в частотно-регулируемых асинхронных электроприво-
дах.
13.Какой диапазон изменения выходной частоты характерен для преоб-
разователей частоты с непосредственной связью?
14.Каковы схемные отличия в преобразователях
частоты с автономным
инвертором тока и автономным инвертором напряжения?
15.Сколько двигателей можно питать от одного преобразователя часто-
ты типа инвертора тока?
16.Какие способы регулирования величины выходного напряжения ис-
пользуются в преобразователях частоты с промежуточной цепью постоянного
тока и инвертором напряжения?
17.Из каких основных элементов состоит вентильный двигатель как
система
регулируемого электропривода?
18.Почему вентильный двигатель называют бесщеточным двигателем
постоянного тока?
19.Для чего в вентильных двигателях используется датчик положения
ротора?
Глава 7. ИНДУКТОРНЫЕ, ШАГОВЫЕ И ЛИНЕЙНЫЕ ЭЛЕК-
ТРОПРИВОДЫ
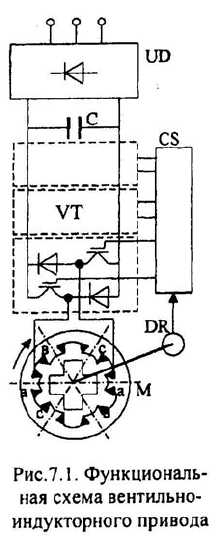
7.1. Вентильно-индукторный электропривод
Одной из перспективных систем регулируемого электропривода явля-
ются вентильно-индукторные электроприводы, использующие индукторную
электрическую машину с пассивным ротором. На статоре такой машины рас-
полагаются электромагниты - индукторы (см. рис.7.1), по обмоткам которых
поочередно пропускается постоянный ток. Ротор двигателя не имеет обмоток
(пассивный) и содержит ряд зубцов, число которых не совпадает с числом
зубцов магнитопровода статора.
На рис.7.1 показана машина, имеющая 6 зубцов
магнитопровода на статоре и 4 - на роторе. Машина
управляется вентильным (транзисторным) коммутатором
VT, осуществляющим переключение обмоток индукторов.
Основная особенность вентильно-индукторных приводов
заключается в том, что переключение обмоток индукторов
производится в соответствии
с положением ротора, для
чего в схеме применяется датчик положения DR.
Принцип работы вентильно-индукторного привода
состоит в поочередном последовательном включении
индукторов (а-а, в-в, с-с), поток которых замыкается через
зубцы ротора. Возбуждение индуктора вызывает возникновение электромаг-
нитных сил притяжения между зубцами индуктора и ближайшими к ним зуб-
цами
ротора.
Под действием этих сил (момента) ротор поворачивается и занимает со-
гласованное положение, когда зубцы ротора устанавливаются напротив зубцов
возбужденной фазы. Так как число зубцов статора и ротора различно, то в со-
гласованном положении для одного индуктора для следующего индуктора зуб-
цы ротора окажутся в несогласованном положении. Поэтому при отключении
первого
индуктора и включении последующего ротор снова повернется на одно
полюсное деление. Последовательная коммутация индукторов с помощью дат-
чика положения через систему управления CS обеспечивает непрерывное соз-
дание вращающего момента и, следовательно, непрерывное вращение ротора
двигателя.
Величина электромагнитного момента определяется средней величиной
тока, подаваемого в обмотки индукторов. Поэтому регулирование момента
двигателя производится изменением напряжения, подводимого к обмоткам ин-
дуктора. В схеме рис
.7.1 изменение напряжения производится методом широт-
но-импульсного регулирования. Для точного регулирования скорости в рас-
сматриваемых приводах вводится внешний контур регулирования.
Вентильно-индукторные электроприводы отличаются конструктивной
простотой и экономичностью. Они находят применение для общепромышлен-
ных механизмов мощностью примерно до 50кВт, не предъявляющих высоких
требований к качеству регулирования. Особенно эффективно использование
вентильно-
индукторных приводов для высокоскоростных механизмов с но-
минальной скоростью 6000об/мин и выше.
7.2. Электропривод с шаговым двигателем
Исполнительные органы некоторых рабочих машин и механизмов
должны совершать строго дозированные перемещения с фиксацией своего по-
ложения в конце движения. Типичными примерами таких механизмов являют-
ся механизмы подачи некоторых металлорежущих станков, сборочных агрега
-
тов, манипуляторов и других машин. Для привода подобных машин исполь-
зуются шаговые электродвигатели. Особенностью таких двигателей является
то, что их движение (угол попорота для двигателей вращательного движения
или перемещение для двигателей поступательного движения) носит не непре-
рывный, а дискретный характер - шагами. Электропривод с такими двигателя-
ми часто называют дискретным электроприводом.
Широкое применение дискретного электропривода определяется тем,
что по принципу своей работы он естественным образом сочетается с цифро-
выми системами управления: микропроцессорами и устройствами числового
программного управления, которые все шире применяются во всех областях
техники. Шаговые двигатели выпускаются промышленностью мощностью от
нескольких ватт до нескольких киловатт [11]. Двигатели характеризуются раз-
виваемым моментом (усилием) и величиной шага (дискреты). Чем меньше ве-
личина шага, тем с большей точностью осуществляется перемещение рабочего
органа
машины.
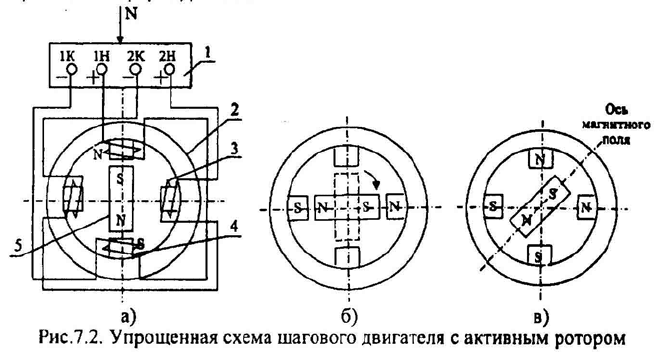
Принцип действия шагового двигателя рассмотрим па примере про-
стейшей схемы двухфазного двигателя с активным ротором (рис.7.2). Такой
шаговый двигатель
имеет на статоре две
пары явно выраженных
полюсов, на которых
находятся обмотки
возбуждения,
образующие две фазы
двигателя. Па роторе
располагается постоянный магнит (активный ротор). Питание обмоток осуще-
ствляется импульсами напряжения,
поступающими с устройства управления,
которое преобразует последовательность управляющих импульсов, равную за-
данному числу шагов, и многоканальную последовательность импульсов, где
число каналов равно числу фаз двигателя.
Пусть напряжение определенной полярности подано на первую обмотку
(1Н- 1K). Тогда ротор двигателя займет положение, покачанное на рис.7.2а. Это
положение будет устойчивым, поскольку при отклонении
от нею на ротор бу-
дет действовать момент, стремящийся вернуть ротор и прежнее положение.
Для выполнения шага движения напряжение снимается с первой обмот-
ки и подастся на вторую (2Н-2K). При этом ротор двигателя сделает шаг, т.е.
повернется на угол π/ 2 (см. рис. 7.2,б). Для выполнения второго шага нужно
спять напряжение с обмотки 2 и подать импульс напряжения обратной поляр-
ности па обмотку 1, и т.д.
Угловое перемещение шагового двигателя за один шаг будет:
рпа /
π
=
,
где р - число пар полюсов ротора (в схеме па рис. 7. 2 р = 1);
п - число фаз статорных обмоток.
Кроме рассмотренного алгоритма коммутации может быть применен
более сложный алгоритм, позволяющий вдвое уменьшить величину шага.
Пусть исходное положение соответствует условию включения обмотки 1, по-
качанному на рис. 7.2. Далее, не снимая напряжение с обмотки 1, подключим
обмотку 2
с полярностью, соответствующей рис. 7.2, в. При этом пространст-
венный вектор результирующей м.д.с. будет располагаться между полюсами
статора, т.е. ось магнитного потока повернется на угол π/ 4 . Соответственно
ротор повернется на половину полюсного деления, т.е. па π/4 .
Для реверса шагового двигателя следует изменить полярность импуль-
сов напряжения. Каждому импульсу
управления соответствует один шаг пово-
рота ротора. Суммарный угол поворота ротора соответствует числу поступаю-
щих импульсов управления N
Nа
⋅
=
ϕ
,
а средняя скорость поворота - частоте коммутаций f
к
:
к
fа
⋅
=
ϕ
Частота коммутаций является важным параметром шагового электро-
привода, т.к. она определяет время отработки управляющего воздействия. До-
пустимая частота коммутаций (ее называют частотой приемистости) ограничи-
вается электромагнитной инерционностью обмоток и механической инерцией
ротора и приводимого механизма. Чем выше инерционность двигателя и боль-
ше статический момент на валу двигателя, тем меньше
частота приемисто-
сти.
Современные шаговые двигатели различны по конструктивному испол-
нению. Двигатели бывают однофазными, двухфазными и многофазными с ак-
тивным и пассивным ротором.
Конструкция активного ротора обычно содержит постоянные магниты и
имеет величину шага от π/12 до π/2. Частота коммутаций таких двигателей ог-
раничена величиной примерно 500Гц.
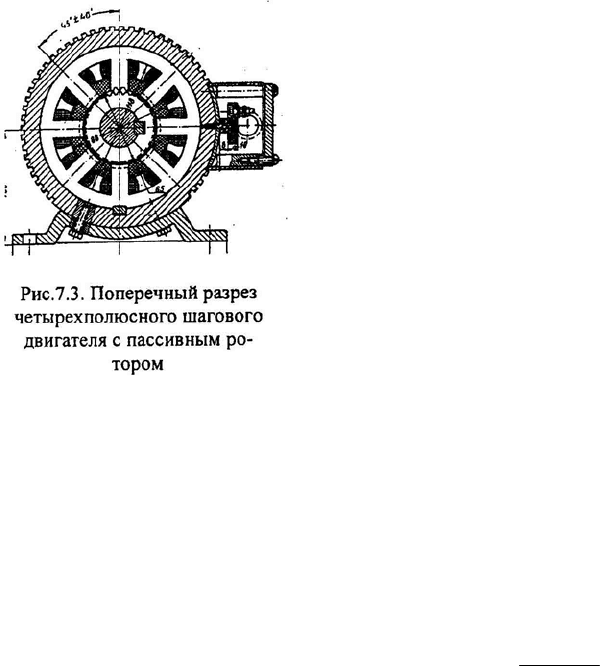
Для шаговых двигателей с малой величиной шага используют пассив-
ный ротор, не содержащий обмоток и магнитов. Статор реактивного
шагового двигателя имеет явно выраженные полюсы, на которых нарезаны
зубцы Z
с
, (см.рис.7.3). На роторе равномерно по окружности нарезано четное
(но не делящееся на 4) число зубцов Z
p
. Выбором числа зубцов ротора дости-
гается смешение в любом положении зубцов ротора
по отношению к зубцам смежных полюсных вы-
ступов статора на
1
/
4
зубцового деления.
Работа шаговых двигателей с пассивным
реактивным ротором заключается в том, что при
подаче напряжения на какую-либо фазу статора ротор
стремится занять такое положение, чтобы зубцы
ротора встали против зубцов соответствующего
полюса и проницаемость магнитной цепи, по которой замыкается ноток данной
фазы, была бы наибольшей.
При подаче тока
в следующую фазу статора ротор повернется на один
шаг, так, чтобы зубцы ротора совпади с зубцами полюса следующей фазы. Ве-
личина шага при этом равна
cp
cp
ZZ
ZZ
а
−
=
π
2
Шаговые двигатели применяются в приводах, где требуется регулиро-
вание положения рабочего органа, а также широко используются для привода
часов.
7.3. Электропривод с линейными двигателями
Подавляюще большинство электродвигателей является электродвигате-
лями вращательною движения. В то же время многие рабочие органы произ-
водственных машин должны по технологии своей работы осуществлять посту-
пательное (например, конвейеры, транспортеры и др.) или возвратно-
поступательное движение (механизмы подачи станков, манипуляторы, порш-
невые и другие машины). Преобразование вращательною движения в поступа-
тельное осуществляется посредством специальных кинематических звеньев:
винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-
шатунная передача и
другие.
Естественным для конструкторов рабочих машин является желание ис-
пользовать для привода рабочих органов, совершающих поступательное и воз-
вратно-поступательное движение, двигатели, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие
линейные асинхронные, вентильные и шаговые двигатели. Принципиально ли-
нейный двигатель любого типа может быть образован из двигателя
вращатель-
ного движения путем линейной развертки цилиндрического статора в плос-
кость [11].
Представление об устройстве линейного асинхронного двигателя мож-
но получить, если развернуть статор асинхронного двигателя в плоскость. При
этом вектор намагничивающих сил статора будет линейно перемешаться вдоль
развертки статора, т.е. при этом образуется не вращающееся (как в обычных
двигателях), а
бс1ущее электромагнитное поле статора. В качестве вторичного
элемента может использоваться ферромагнитная полоса, располагаемая с не-
большим воздушным зазором вдоль развертки статора. Эта полоса играет роль
короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем
статора и линейно перемещается со скоростью, меньшей скорости движения
поля статора на величину линейного абсолютного скольжения.
Линейная
скорость бегущего электромагнитного поля будет
10
3 fV ⋅=
τ
, м/с, где τ, м - полюсное деление - расстояние между соседни-
ми полюсами линейного асинхронного двигателя.
Скорость вторичного элемента
)1(
0 л
SVV
−
=
, где S
л
- относительное ли-
нейное скольжение.