Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.

ля и ведущими к его перегреву. Получаемые при этом способе механические
характеристики неблагоприятны для качественного регулирования. Диапазон
регулирования не превышает 1,5:1; более глубокое регулирование скорости
можно допускать только кратковременно. Исходя из данной оценки, ре-
гулирование изменением величины питающего напряжения применяется, глав-
ным образом, только для обеспечения плавного пуска нерегулируемых асин-
хронных электроприводов
или для кратковременного снижения скорости. Ино-
гда этот способ регулирования используется для регулирования скорости насо-
сов и вентиляторов (механизмов с вентиляторным характером нагрузки) не-
большой мощности (до 15кВт), однако и в этом случае необходимо увеличение
установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скоро-
сти может производиться воздействием
на роторную цепь двигателя. При вве-
дении добавочного сопротивления в цепь ротора энергия скольжения рассеива-
ется не в объеме двигателя, а в сопротивлениях. Этот способ регулирования
оценивается как неэкономичный. При использовании релейно-контакторных
схем исключается плавность регулирования скорости. В настоящее время
управление с введением добавочных сопротивлений в цепь ротора использует-
ся
, в основном, для пуска асинхронных двигателей с фазным ротором. Элек-
троприводы с реостатно - контакторным управлением не рассматриваются на-
ми, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения
асинхронного двигателя, связаны с выделением энергии скольжения в ротор-
ной цепи двигателя. В рассматриваемых выше способах эта энергия расходова-
лась на
нагрев обмотки ротора и роторных сопротивлений. Существуют систе-
мы регулируемого электропривода, в которых энергия скольжения не теряется
в сопротивлениях, а используется полезно - возвращается в питающую сеть,
что делает регулирование в этих системах экономичным. К таким системам ре-
гулируемого привода относятся асинхронные вентильные каскады и двигатели
двойного питания. Особенностью каскадных схем асинхронного
привода явля-
ется ограниченный диапазон регулирования - не больше, чем 2:1. В этом диапа-
зоне каскадные схемы обеспечивают плавное и экономичное регулирование
скорости. Такие системы электропривода наиболее целесообразны для мощных
турбомеханизмов - насосов и вентиляторов.
6.2. Асинхронный электропривод с частотным регулированием
скорости
Возможность частотного регулирования скорости асинхронного двига-
теля - регулирование путем изменения частоты питающего напряжения - выте
-
кает из того обстоятельства, что скорость вращения электромагнитного поля
статора пропорциональна частоте питающего напряжения
n
p
f
1
0
2
⋅
=
π
ω
(6.2)
Следует также учесть, что поскольку с изменением частоты питающего
напряжения изменяется и величина потока двигателя Ф
1
,
1
1
1
1
1
кf
U
кf
Е
Ф
≈=
(6.3)
то в большинстве случаев одновременно с изменением
частоты питающего напряжения необходимо регулировать и
его амплитуду. Необходимость регулирования напряжения
при уменьшении частоты вниз от номинальной связана с тем,
что из-за уменьшения индивидуального сопротивления обмо-
ток двигателя ток намагничивания будет возрастать, что
приведет к насыщению магнитопровода двигателя и его
перегреву. Регулирование
напряжения следует производить
таким образом, чтобы скольжение двигателя было ми-
нимальным.
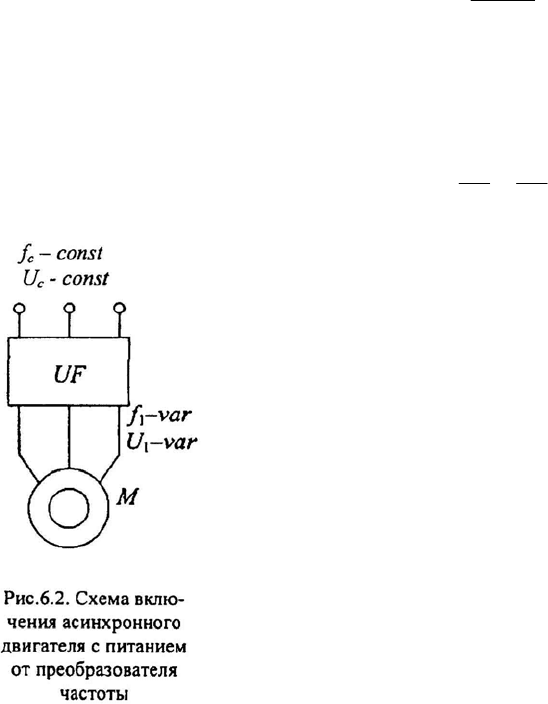
Для реализации способа частотного регулирования асинхронный корот-
козамкнутый двигатель включается в питающую сеть с параметрами U
c
и f
c
че-
рез преобразователь частоты UF (см.рис.6.2). В качестве преобразователей час-
тоты в настоящее время используются, в основном, полупроводниковые преоб-
разователи частоты.
При частотном регулировании величина относительного скольжения S
j
зависит как от разности скоростей вращающегося электромагнитного поля и
ротора - абсолютного скольжения S
абс
= ω
0
- ω , так и от относительного значе-
ния f
1
, частоты питающего напряжения
*1
1
1
f
f
f
н
j
= (6.4)
j
j
j
S
0
0
ω
ω
ω
−
= (6.5)
Здесь f
1j
, ω
0j
, S
j
, - регулируемые значения частоты напряжения статора и
соответствующие значения скорости вращения поля и скольжения;
f
1н
и ω
0н
- номинальные значения частоты статора и скорости поля, со-
ответствующие паспортным данным двигателя.
С учетом (6.2)
*10
1
f
S
н
j
⋅
−=
ω
ω
(6.6)
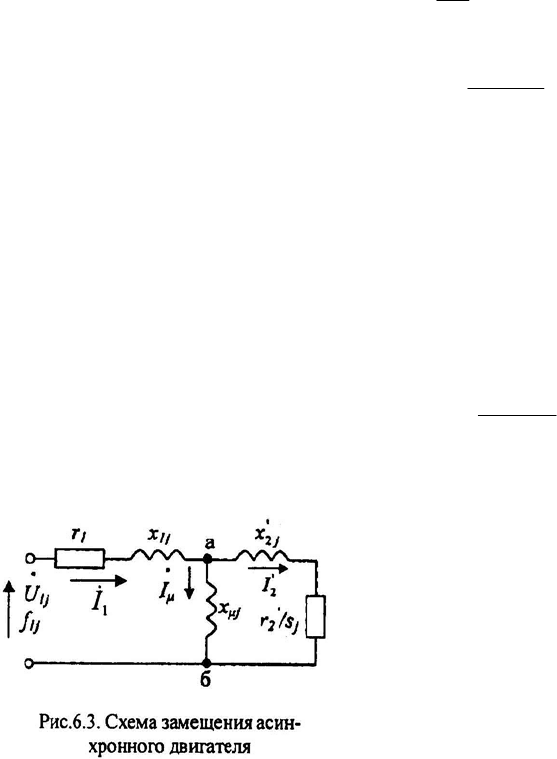
Для анализа электромеханических характеристик двигателя при час-
тотном регулировании рассмотрим Т-образную
схему замещения двигателя (рис.6.3). В отличие от
ранее приведенной схемы замещения в данном
случае приходится учитывать, что реактивные
сопротивления двигателя зависят от частоты
питающего напряжения и изменяются с изменением частоты.
*1
'
2
'
2
*111
fxx
fxx
н
нj
⋅=
⋅
=
*1
*1
fxx
fxx
кнк
нj
⋅=
⋅
=
μμ
(5.7)
В связи с этим нужно заметить, что при номинальной частоте 50Гц ин-
дуктивное сопротивление контура намагничивания х
μн
на порядок (для машин
малой мощности) или на два порядка (для машин большой мощности) больше,
чем активное сопротивление обмотки статора r
1
. Поэтому при анализе и расче-
те электромеханических характеристик асинхронных двигателей, работающих
при постоянной номинальной частоте питающего напряжения, сопротивлением
r
1
, обычно пренебрегают. Если же двигатель работает с переменной частотой
напряжения, то при снижении частоты сопротивление r
1
становится соизмери-
мым с реактивными сопротивлениями машины и учет сопротивления r
1
являет-
ся необходимым.
Мощность скольжения, выделяемая в цепи ротора, расходуется на на-
грев обмоток ротора как следует из (3.37)
'
2
2'
20
3 rISMР
jjs
==
ω
, откуда
jj
S
rI
М
0
'
2
2'
2
3
ω
= (6.8)
Из схемы замещения, учитывая, что отношения х
1н
/х
μн
и
нн
хx
μ
/
'
2
гораздо
меньше единицы и ими можно пренебречь, определим значение
'
2
I
2
*1
'
21
2
'
2
1
2
*1
2
1
'
2
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++
=
fxS
rr
S
r
rfx
U
I
нjj
кн
j
μ
(6.9)
Подставив (6.9) в (6.8), получим формулу для механических характери-
стик при переменных значениях величины и частоты напряжения питания
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++
=
*1
'
21
2
'
2
1
2
*1
2
0
'
2
2
1
3
fxS
rr
S
r
rfxS
rU
M
нjj
кнj
j
μ
ω
(6.10)
Заметим, что если положить r
1
/x
μн
= 0 и f
1*
= 1, то формула (6.10) станет
идентичной формуле для механических характеристик нерегулируемого по
частоте асинхронного двигателя (см.3.21).
Положив dM/dS
j
=0, найдем значения максимального момента и крити-
ческого скольжения
()
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++±
=
2
*1
2
2
1
2
*1
22
110
2
1
12
3
fx
r
fxrr
U
М
н
кнj
j
к
μ
ω
, (6.11)
2
*1
22
1
2
*1
1
'
2
1
fxr
fx
r
rS
кн
н
кj
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
±=
μ
(6.12)
Знак (+) соответствует двигательному режиму, знак (-) - режиму реку-
перативного торможения.
Анализируя выражение (6.11), можно установить, что, если пренебре-
гать величиной активного сопротивления статора (r
1
= 0), то, для того чтобы
при частотном регулировании (уменьшении частоты вниз от номинальной) со-
хранять критический момент постоянным, нужно величину напряжения изме-
нять пропорционально изменению частоты.
const
f
U
=
*1
*1
(6.13)
где
н
j
U
U
U
1
1
*1
= .
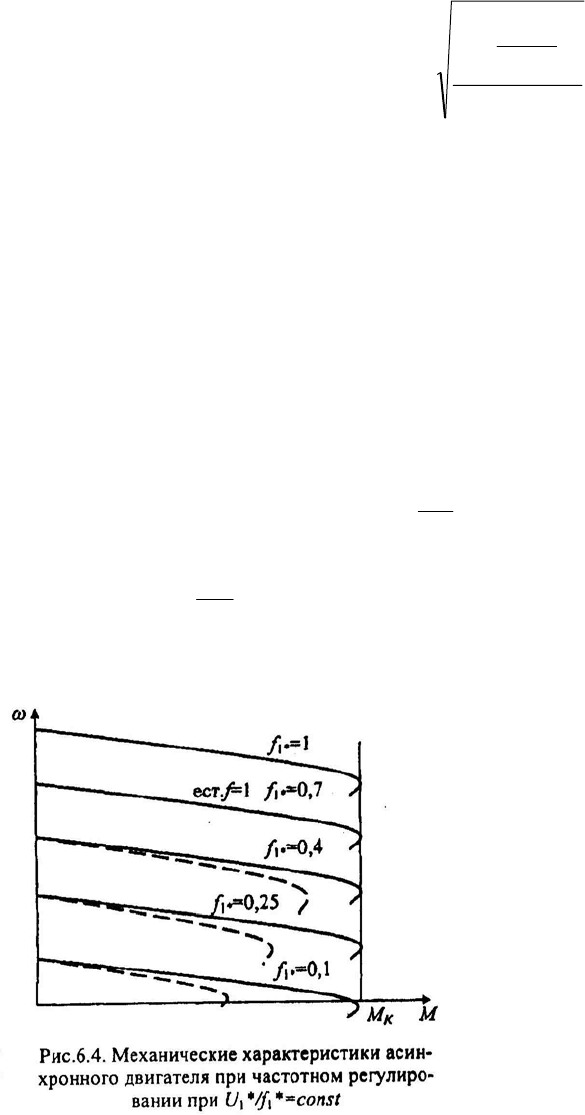
Механические характеристики, соответствующие частотному регули-
рованию при выполнении соотношения
(6.13) и r
1
=0, показаны на рис.6.4
(сплошными линиями). В первом при-
ближении пропорциональное
регулирование напряжения в
соответствии с соотношением (6.13)
обеспечивает работу двигателя с
постоянным потоком.
В действительности при малых
значениях частоты (f
1*
<0,3) падение напряжения на сопротивлении r
1
, сущест-
венно снижает величину напряжения, прикладываемого к контуру намагничи-
вания (напряжение U
aб
на рис.6.2).
1
1
.
1
..
rIUU
аб
−= .
Падение напряжения на индуктивном сопротивлении х
1
, уменьшается с
уменьшением частоты и поэтому не оказывает такого влияния на напряжение
U
aб
, как падение напряжения на активном сопротивлении r
1
которое не зависит
от частоты.
При более точном расчете с учетом падения напряжения U на сопро-
тивлении r
1
, механические характеристики имеют вид, показанный на рис.6.4
пунктиром. При малых значениях частоты, когда относительное значение па-
дения напряжения на сопротивлении r
1
становится значимым, поток двигателя
уменьшается и соответственно уменьшается максимальный момент М
к
, что
следует также из формулы (6.11).
Поэтому для того чтобы регулировать скорость двигателя, сохраняя
максимальный момент двигателя постоянным, нужно величину напряжения
уменьшать в меньшей степени, чем уменьшается частота, примерно в соотно-
шении:
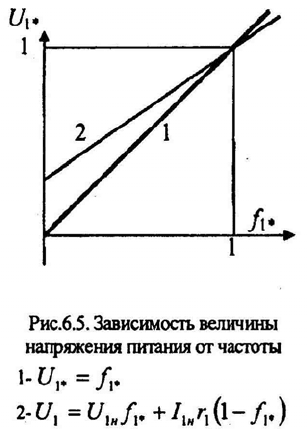
)1(
*111*111
frIfUU
нн
−
+
= (6.14)
Такой способ регулирования напряжения называют «пропорциональное
регулирование с I·r компенсацией». Зависимость
)(
*1*1
ffU
=
показана на рис.6.5. При регулировании
напряжения в соответствии с соотношением (6.14)
механические характеристики будут иметь вид,
показанный на рис.6.4 сплошными линиями.
Следует иметь в виду, что величина I·r
компенсации зависит от относительной величины r
1
,
которая для двигателей мощностью более 100кВт
незначительна и ею, как правило, можно пре-
небрегать; для двигателей мощностью до 15кВт учет r
1
, обязателен.
В ряде случаев, в частности, при вентиляторном характере нагрузки, нет
необходимости при снижении скорости поддерживать критический момент
двигателя равным номинальному. В этом случае более целесообразно выдер-
живать постоянным соотношение между статическим и максимальным момен-
тами двигателя М
с
/М
к
= const. При этом следует пользоваться следующим со-
отношением между частотой и напряжением (формула М.П. Костенко):
**1*1 c
MfU = (6.15)
где М
с*
. = М
с
/М
н
- относительное значение статического момента при
данной частоте (скорости).
Так, для привода вентилятора при снижении скорости в 2 раза, статиче-
ский момент снижается в 4 раза. Тогда, в соответствии с (6.15) при снижении
скорости и частоты в 2 раза, напряжение можно уменьшить в 4 раза. При этом
сокращаются потери в обмотке статора и магнитопроводе машины.
При
стандартной частоте питания 50Гц невозможно получить скорость
асинхронного двигателя выше 3000 об/мин. Для получения более высокой ско-
рости необходимо питать асинхронный двигатель напряжением с частотой бо-
лее 50Гц. Для многих механизмов: машины текстильной промышленности,
шлифовальные станки, центрифуги и другие, - необходимы скорости рабочего
органа 6000, 9000, 1200 об/мин и более. В этом случае применяют
преобразова-
тели частоты с выходной частотой более 50Гц. Однако повышение напряжения
выше стандартного, как правило, невозможно или затруднено. В этом случае
использование соотношения (6.13) невозможно, и регулирование скорости по-
вышением частоты выше номинальной производится при постоянном напря-
жении U
1*
=1.
Очевидно, что в этом случае ток намагничивания I
μ
уменьшается с рос-
том частоты, соответственно падает поток двигателя. Как следует из (6.11),
максимальный момент снижается примерно обратно пропорционально квадра-
ту частоты. Однако, по-
поскольку ток ротора
'
2
I
можно за счет увеличения
скольжения длительно
поддерживать равным
номинальному, то длительно
допустимый номинальный
момент уменьшается обратно
пропорционально частоте в первой степени. Поскольку с увеличением частоты
скорость двигателя увеличивается, то длительно допустимая мощность на валу
двигателя остается примерно постоянной. Поэтому регулирование повышением
частоты сверх номинальной при сохранении постоянства напряжения относят к
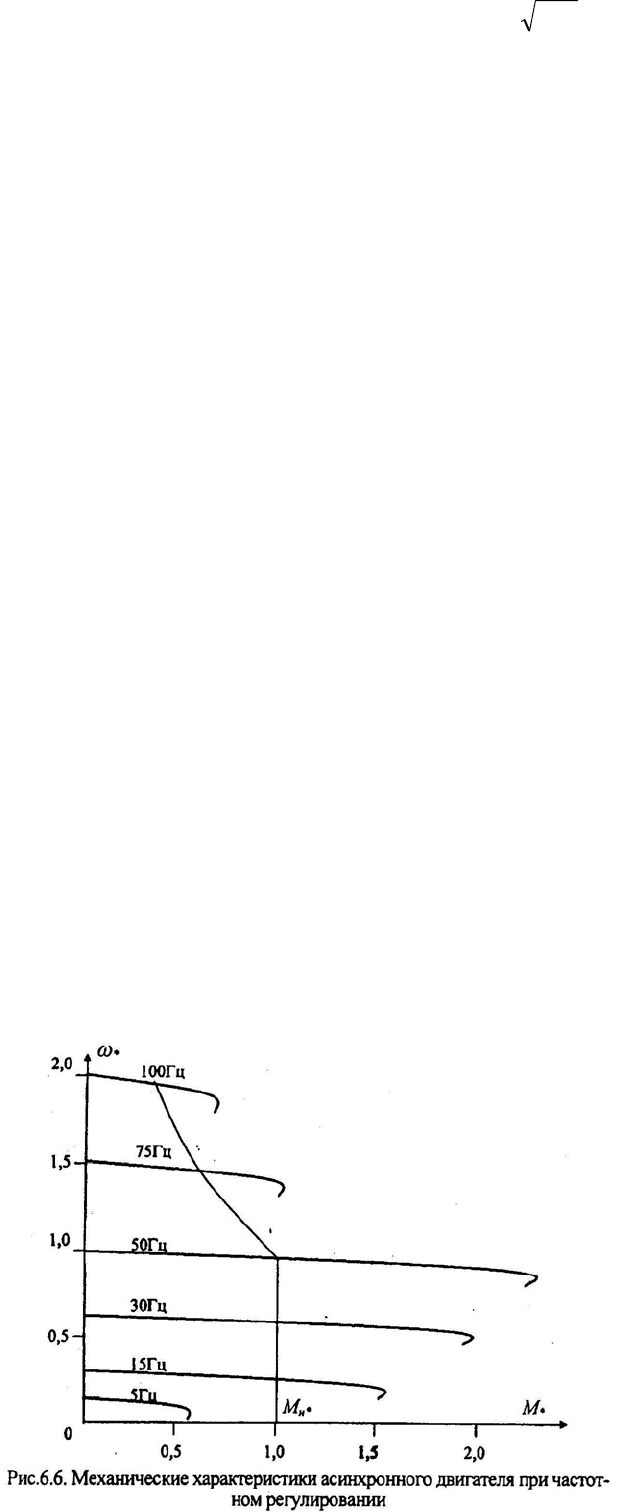
регулированию с постоянством мощности. Механические характеристики для
этого случая приведены на рис.6.6. Регулирование изменением частоты вниз от
номинальной с одновременным регулированием напряжения в соответствии с
соотношением (6.14) относят к регулированию с постоянным моментом.
Задача 6.1. Частотно-регулируемый электропривод состоит из асин-
хронного короткозамкнутого двигателя типа 4А132М4УЗ и преобразователя
частоты типа инвертора напряжения.
Технические данные двигателя Р
н
=11кВт, U
1Л
=380B, ω
н
=1455 об/мин =
157 1/с, М
к
/М
н
=2,2, r
1
=0,43Ома,
'
2
r =0,32Ома, х
к
= 1,5Ома, х
μ
=32Ома.
Требуется рассчитать механические характеристики привода при сле-
дующих соотношениях частоты и напряжения двигателя
1.
const
f
U
=
1
1
, f
1
изменяется от 5 до 50Гц
2.
constU =
1
, f
1
изменяется от 50 до 100Гц.
Решение.
1. Номинальный момент двигателя
Нм
Р
M
н
н
н
72
152
11000
===
ω
2. Номинальное скольжение двигателя
03,0
1500
14551500
=
−
=
−
=
ОН
НОН
н
п
пп
S
3. Расчет механических характеристик сводим в таблицу 6.1.
За базовые величины при расчете принять ω
0
= ω
0н
=157 1/с; М
н
=72Нм.
Расчет производится по формулам: ω
0j
- (6.2); S
кj
- (6.12); M
кj
- (6.11); М-(6.10).
Таблица 6.1
Расчет механических характеристик асинхронного двигателя при час-
тотном регулировании
Характери- f
1*
, U
1j
, В ω
0j
,
/
S
кj
, М
к*
, ω
0j*
, S
j*
; ω
j*
; М
*
,
Естественная
х-ка 220В
1,0
1,0
220
220
157
157
0,155
0,155
2,35
2,35
1,0
1,0
0,0
0,03
1,0
0,97
0,0
1,0
U
1
/f
1
=const
30Гц
0,6
0,6
132
132
94,2
94,2
0,20
0,20
1,98
1,98
0,6
0,6
0,0
0,1
0,6
0,54
0,0
1,56
U
1
/f
1
=const
15Гц
0,3
0,3
66
66
47,1
47,1
0,4
0,4
1,54
1,54
0,3
0,3
0,0
0,2
0,3
0,24
0,0
1,21
U
1
/f
1
= const
5Гц
0,1
0,1
22
22
15,7
15,7
0,6
0,6
0,6
0,6
0,1
0,1
0,0
04
0,1
0,07
0,0
0,485
U
1
=220 В
f
1
=75 Гц
1,5
1,5
220
220
235,5
235,5
0,1
0,1
1,1
1,1
1,5
1,5
0,0
0,05
1,5
1.42
0,0
0,9
U
1
=220 В
f
1
=100 Гц
2,0
2,0
220
220
314
314
0,08
0,08
0,72
0,72
2,0
2,0
0,0
0,04
2,0
1,9
0,0
0,55
Как видно из полученных характеристик (рис.6.6), при снижении часто-
ты с одновременным снижением напряжения в соотношении
constfU =
*1*1
/ ,
критический момент при низких частотах питающего напряжения существенно
снижается, что связано с падением напряжения на активном сопротивлении r
1
.
Для того, чтобы критический момент остался постоянным, напряжение нужно
снижать в меньшей степени, чем частоту, компенсируя падение напряжения на
активном сопротивлении статора, т.е. следует пользоваться соотношением
(6.14). При повышении частоты сверх номинальной и сохранении величины
напряжения, равной номинальной, скорость двигателя возрастает, но макси-
мальный момент уменьшается.
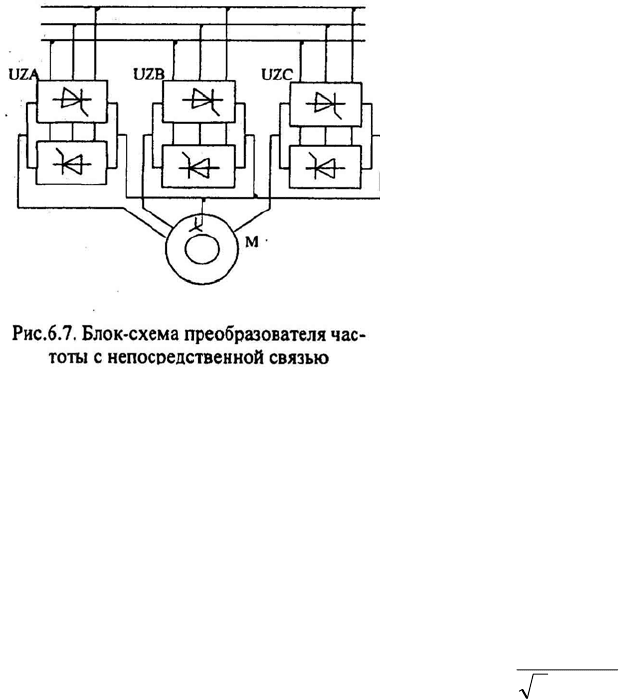
6.3. Электропривод по системе преобразователь частоты с непо-
средственной связью - асинхронный двигатель
Существующие вентильные (полупроводниковые) преобразователи час-
тоты можно разделить на две группы:
1 - преобразователи с непосредственной связью питающей сети и на-
грузки, сокращенно НГГЧ;
2 - преобразователи частоты с промежуточным звеном постоянного то-
ка.
Преобразователь частоты с непосредственной связью включается в ста-
торную цепь асинхронного двигателя и служит для преобразования напряже-
ния стандартной частоты в регулируемое в определенных пределах напряжение
по величине и частоте.
Преобразователи частоты с непосредственной связью обычно пред-
ставляют собой три согласованно работающих
реверсивных тиристорных преобразователя
постоянного тока. Блок схема не-
посредственного преобразователя частоты
представлена на рис.6.7.
Каждая фаза асинхронного
двигателя
питается от своего реверсивного
преобразователя. Напряжение,
прикладываемое к обмотке статора, будет равно:
aUкU
ссхф
cos
=
где U
c
- напряжение питающей сети.
Если угол регулирования а устанавливать в соответствии текущим зна-
чением частоты, например,
cсх
н
в
Uк
fU
a
⋅
=
2
cos
*11
и поддерживать неизменным в течение одного полупериода выходной частоты
преобразователя, а в течение второй полуволны переключать группы вентилей