Онищенко Г.Б. Электрический привод
Подождите немного. Документ загружается.


3. Скорость холостого хода при U
я
=U
н
=220 В.
3,118
86,1
220
0
===
С
U
я
ω
1/с
4. Добавочное сопротивление, вводимое в цепь якоря
ОмR
I
U
R
я
пуск
я
доб
86,177,0
5,335,2
220
=−
⋅
=−=
5. Максимальный момент при пуске
НмММ
нк
5,1552,625,25,2
=
⋅
=
=
6. Жесткость естественной механической характеристики
смкг
R
С
я
/.5,4
77,0
86,1
2
22
===
β
7. Жесткость пусковой механической характеристики
смкг
RR
С
добя
п
/.32,1
86,177,0
86,1
2
22
=
+
=
+
=
β
8. Электромеханическая постоянная времени при работе на естествен-
ной характеристике
с
J
Т
м
22,0
5,4
1
===
Σ
β
9. Электромеханическая постоянная времени при работе на пусковой
характеристике
с
J
Т
п
мп
76,0
32,1
1
===
Σ
β
10. Электромагнитная постоянная времени при работе на естественной
характеристике
с
R
L
Т
я
я
я
013,0
77,0
01,0
===
Поскольку Т
я
<<Т
м
то ею можно пренебречь.
11.Построим характеристику переходного процесса при пуске вхоло-
стую по формуле (8.14)
()
t
T
t
ее
Мп
31,1
0
13,1181
−
−
−=
⎟
⎠
⎞
⎜
⎝
⎛
−=
ωω
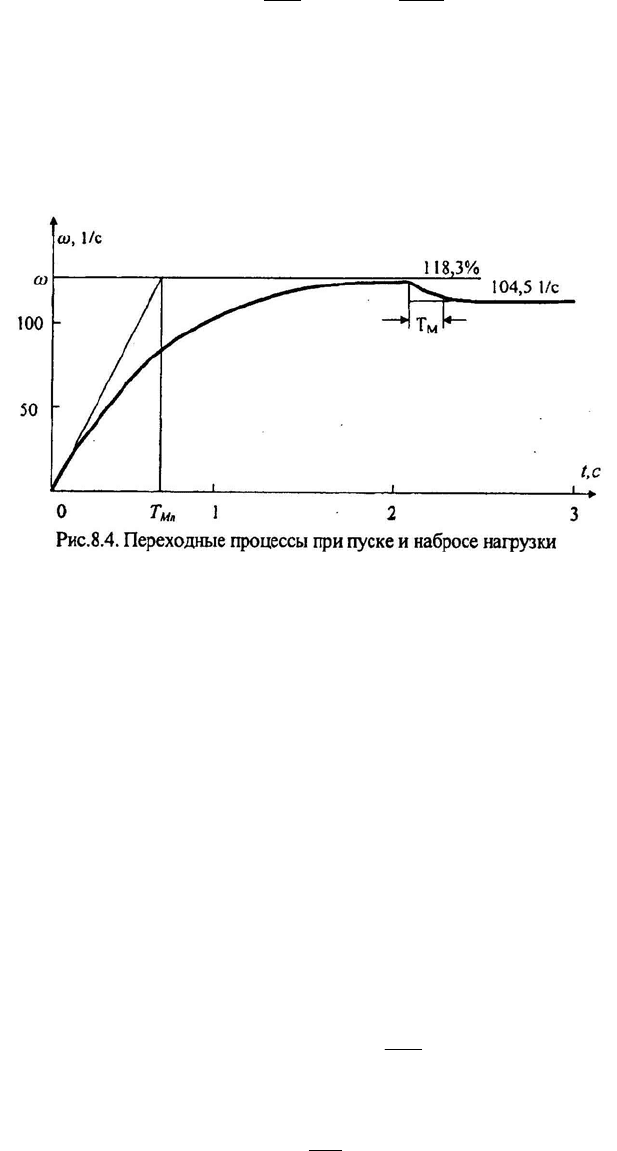
12. По окончании переходного процесса пусковое сопротивление будет
закорочено, после чего к валу двигателя будет приложен момент М
с
=М
н
. По-
строить переходный процесс изменения скорости, связанный с приложением
нагрузки.
13.Установившееся значение скорости после приложения нагрузки
5,104
5,4
2,62
3,118
0
=−=−=
β
ωω
с
уст
М
1/с.
14. Построим характеристику переходного процесса при приложении
нагрузки по формуле (8.13)
ω= 104,5- (104,5 -118,3)е
-4,55t
Характеристики переходных процессов показаны на рис. 8.4.
8.3. Переходные процессы в электроприводе постоянного тока
Рассмотрим динамические характеристики электропривода постоянного
тока по системе тиристорный преобразователь - двигатель постоянного тока
(ТП-Д). Тиристорный преобразователь будем рассматривать как безынерцион-
ное звено с постоянным передаточным коэффициентом к
п
.
Электромеханические процессы при постоянном потоке возбуждения
описываются следующей системой уравнений (см. раздел 5.1):
dt
d
JММ
СIМ
dt
dI
LRIСU
с
я
я
яяяя
ω
ω
Σ
=−
=
++=
(8-15)
Здесь С=кФ - машинная постоянная при неизменном потоке возбужде-
ния.
Электромагнитная и механическая инерционности двигателя отражают-
ся соответственно электромагнитной Т
я
и электромеханической Т
м
постоянны-
ми времени. Для двигателя постоянного тока
я
я
я
R
L
Т =
(8.16)
2
С
RJ
J
Т
я
м
Σ
Σ
==
β
(8.17)
Решая уравнения (8.15) с учетом (8.16) и (8.17), получим
устмям
dt
d
T
dt
d
ТТ
ωω
ωω
=++
2
2
(8.18)
где:
2
С
МR
C
U
сяя
уст
−=
ω
.
Полученное уравнение (8.18) является общим для двигателей с линей-
ной механической характеристикой, вид которой определяется величиной ее
жесткости β.
Переходя к операторной форме записи, полагая d/dt = р, получим ис-
ходную для построения структурной схемы систему уравнений
ω
ω
рТ
R
С
ММ
СIМ
рТRIСU
м
я
с
я
яяяя
2
)1(
=−
=
+
+
=
(8.19)
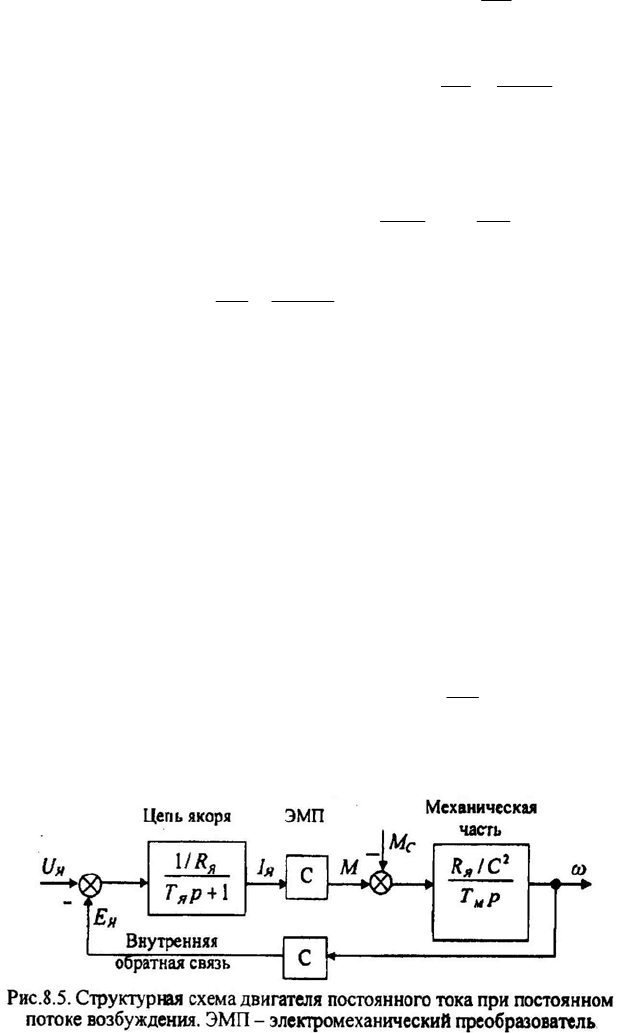
Данная система уравнений отражается структурной схемой двигателя
постоянного тока
независимого
возбуждения, состоящей
из четырех типовых
динамических звеньев
(рис.8.5).
Механическая часть двигателя характеризуется интегрирующим звеном
с постоянной времени Т
м
, величина которой определяется суммой момента
инерции якоря двигателя и моментами инерции всех движущихся частей рабо-
чей машины, приведенными к валу двигателя. Электромеханическое преобра-
зование энергии отражается пропорциональным звеном с коэффициентом пе-
редачи С, которое указывает, что момент двигателя пропорционален току яко-
ря. Электрическая цепь якоря двигателя представлена инерционным звеном с
постоянной времени Т
я
. Это звено характеризует, как изменяется ток якоря при
изменении разности напряжений (U
я
- Е
я
). Э.д.с. якоря Е
я
= кФω отражается в
виде отрицательной обратной связи. Такая связь является внутренней, т.к. она
соответствует природе физических процессов в описываемом объекте, а не соз-
дана системой регулирования.
Передаточная функция двигателя по управляющему воздействию при
регулировании скорости изменением напряжения якоря будет:
1
/1
)(
)(
)(
2
++
==
→ рТрТТ
C
pU
p
pW
мям
я
U
я
ω
ω
(8.20)
Характер переходных процессов, определяется видом корней характе-
ристического уравнения (см. 8.18).
01
2
=++ рТрТТ
мям
(8.21).
Корни этого уравнения
ям
яммм
ТТ
ТТТТ
р
2
4
2
2,1
−±−
=
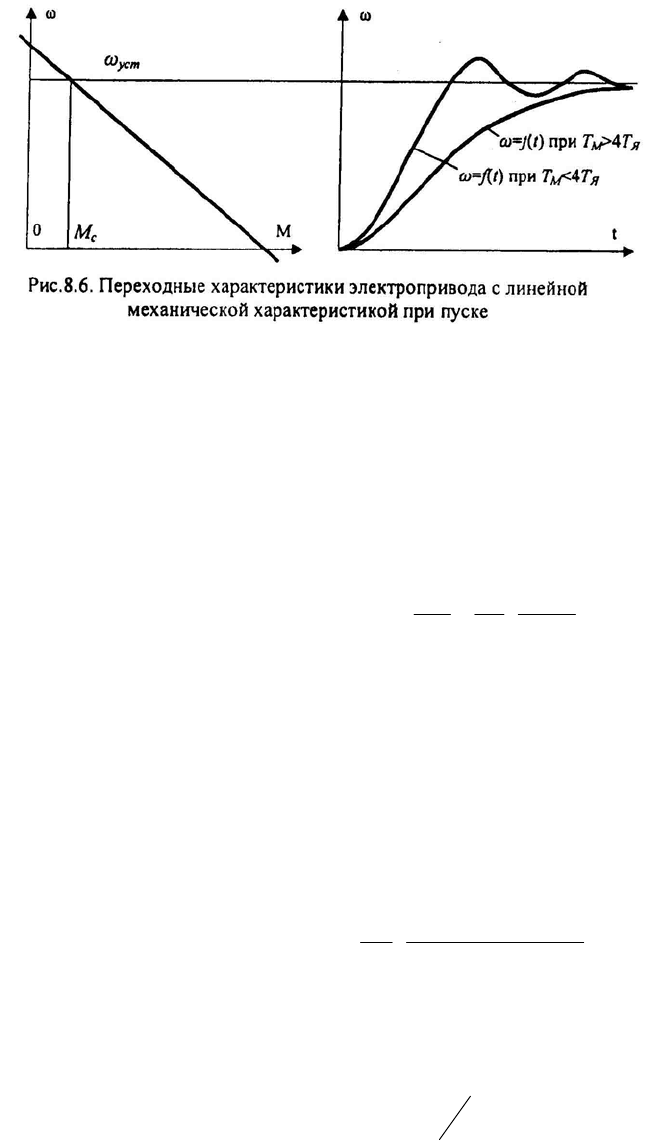
Если Т
м
>4Т
я
, то корни будут вещественными и отрицательными. В
этом случае решение уравнения (8.18) имеет вид:
tрtр
уст
еСеС
21
21
++=
ωω
(8.22)
Переходный процесс в этом случае будет носить монотонный характер
с изменением скорости по закону, соответствующем) инерционному звену вто-
рого порядка (см. рис.8.6).
Если T
м
< 4Т
я
, то корни будут комплексными сопряженными с отрица-
тельной вещественной частью р
1,2
= а ± jΩ , где
я
м
я
я
Т
Т
Т
Т
а
2
14
;
2
1
−
=Ω−=
(8.23)
Решение дифференциального уравнения (8.18) при этом будет:
at
уст
etCtС )sincos(
21
Ω+Ω+=
ωω
(8.24)
Постоянные интегрирования С
1
и С
2
находятся из начальных или ко-
нечных условий переходного процесса.
Переходный
процесс в этом случае
характеризуется перио-
дическими колебаниями
с частотой Ω и
затухающей
амплитудой. Время
переходного процесса ориентировочно может быть оценено, как t
nn
= (6 —
10)Т
я
. Колебательность процесса связана с тем, что происходит периодическое
преобразование кинетической энергии в электромагнитную и обратно.
Выражение переходной характеристики для тока I
я
= f(t) может быть
получено из уравнения движения.
dt
td
C
J
С
М
I
с
я
)(
ω
⋅+=
Σ
(8.25)
т.е. ток является суммой двух составляющих: статического тока
CMI
cc
/= и динамического тока, который пропорционален производной от ско-
рости (ускорению).
Передаточную функцию для тока при управляющем воздействии най-
дем из структурной схемы рис.8.5.
)(
1
)(
22
pI
рТрТТ
p
C
J
pW
c
мям
IU
яя
+
++
⋅=
Σ
→
(8.26)
где I
с
- статический ток, соответствующий статическому моменту.
На рис.8.7 показаны переходные характеристики скорости и тока при
пуске двигателя до скорости
с
я
уст
С
U
ωω
Δ−= при наличии на валу двигателя ре-
активного статического момента; будем полагать, что в рассматриваемом слу-
чае Т
м
>4Т
я
. В течение времени t
0
(см. рис.8.7,а) ток якоря нарастает до значения
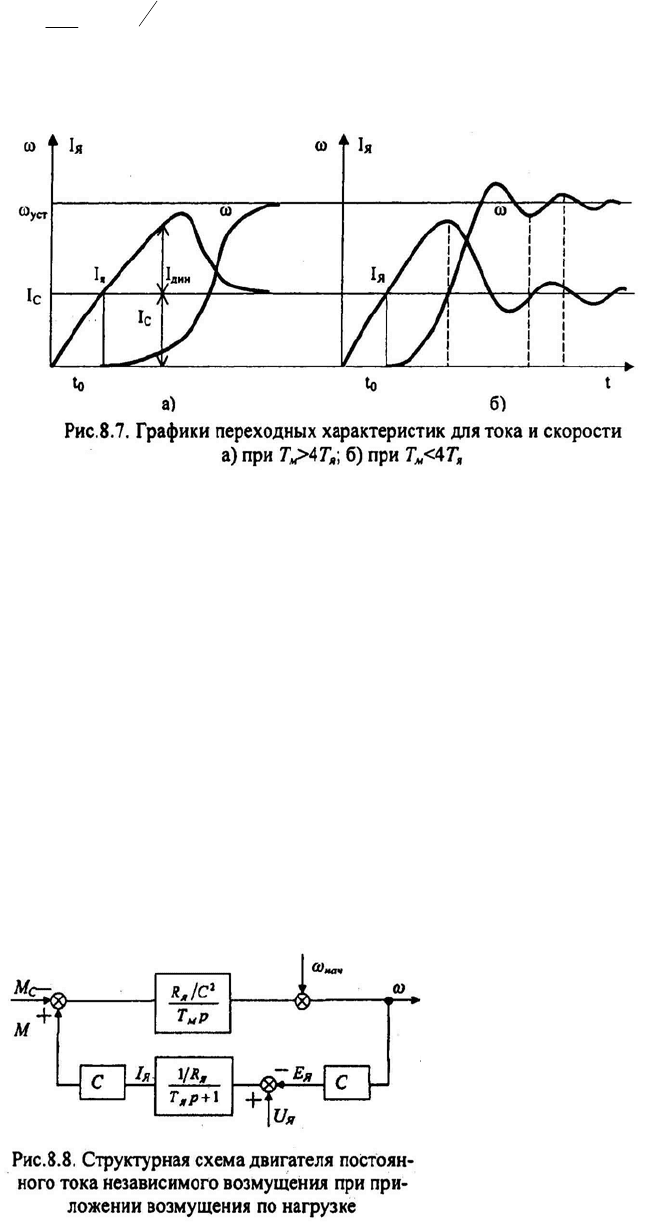
CMI
cc
/= . Нарастание происходит по экспоненциальному закону
⎟
⎠
⎞
⎜
⎝
⎛
−=
−
я
T
t
я
я
c
е
R
U
i
1 .
Когда ток станет равным статическому, начинается движение вала
двигателя.
Динамический ток
возрастает, вследствие
чего растет ускорение
двигателя. Затем под
действием увеличи-
вающейся противоэ.д.с.
якоря ток начинает
спадать, и скорость двигателя асимптотически приближается к установившему-
ся значению.
Если Т
м
<4Т
я
, то в кривых тока и скорости появится колебательная со-
ставляющая (см. рис. 8.7,6).
Рассмотрим теперь динамические процессы при приложении нагрузки к
валу двигателя при постоянном напряжении, подводимом к якорной цепи дви-
гателя. Схема на рис.8.6 удобна для анализа переходных процессов по управ-
ляющему воздействию, когда изменяется U
y
. В нашем случае величина задания
скорости остается постоянной, а изменяется момент нагрузки М
с
. Для удобства
анализа процессов и нахождения
передаточной функции электропривода по
возмущающему воздействию преобразуем
структурную схему так, чтобы входным
воздействием являлся статический момент
М
с
, а выходным параметром - скорость ω.
Структурная схема для этого случая показана на рис.8.8. Примем, что двига-
тель работал вхолостую при М
с
=0 со скоростью СU
я
/
0
=
ω
, ток якоря I
я
=0, так
что приложенное напряжение уравновешивалось э.д.с. якоря U
я
= Е
я
.
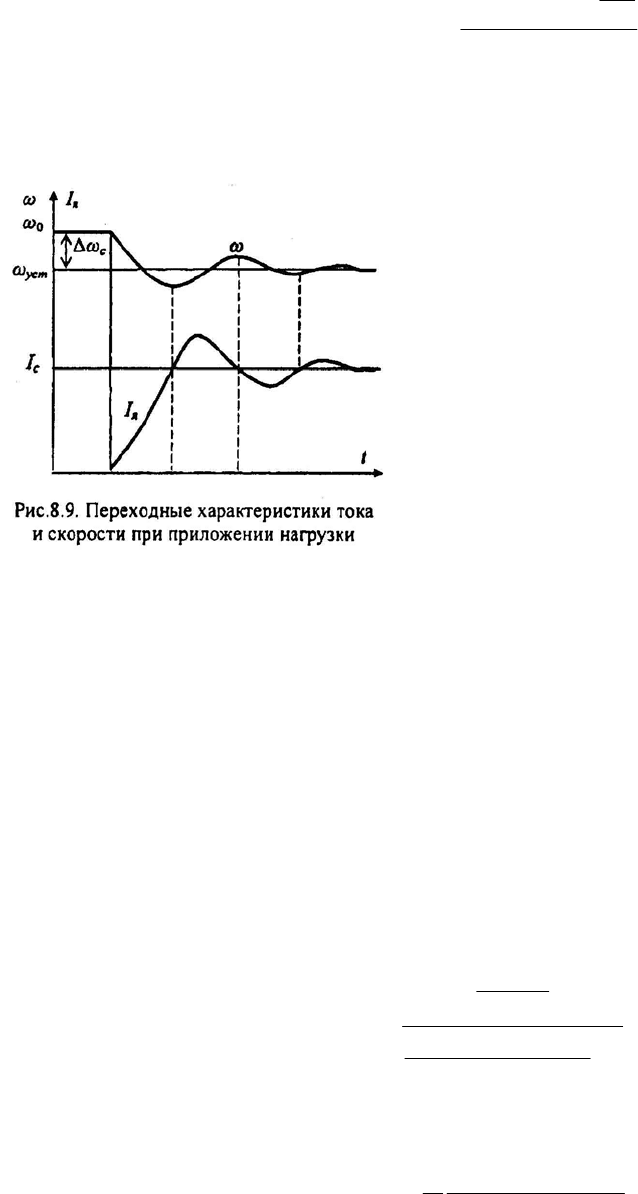
Если к валу двигателя скачком приложить нагрузку - статический мо-
мент М
с
=СI
с
, то скорость двигателя начнет снижаться, э.д.с. якоря будет умень-
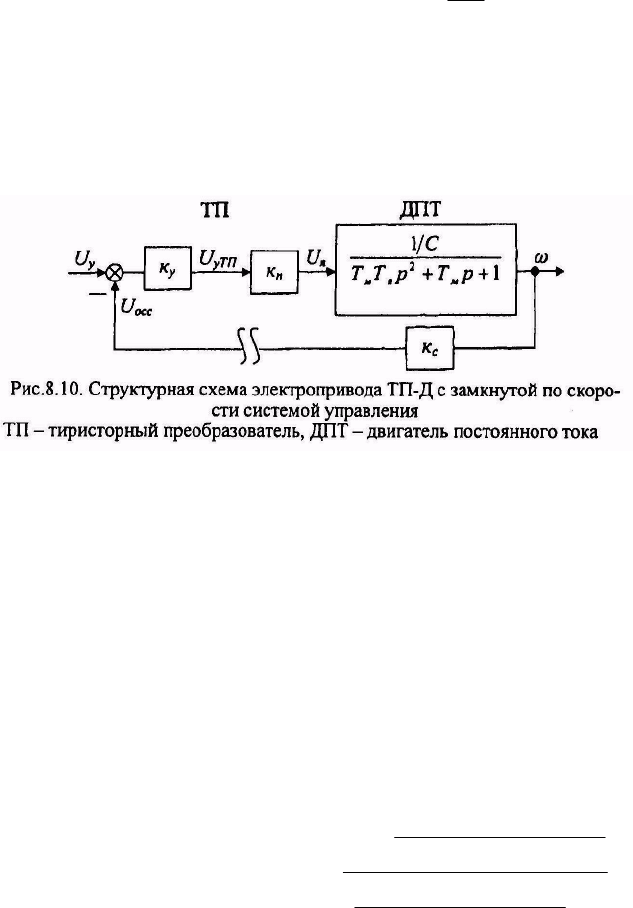
шаться и в цепи якоря начнет нарастать ток (см. рис.8.9)
я
z
яя
я
R
dt
dI
LСU
I
−−
=
ω
Если индуктивность якорной цепи велика (постоянная времени Т
я
>
1
/
4
Т
м
), то нарастание тока будет отставать от темпа снижения скорости и к
моменту, когда скорость снизится до нового
установившегося значения
β
ω
ω
ω
ω
/
00 ссуст
М
−
=
Δ
−
=
, ток якоря еще не
достигнет величины I
с
, при которой момент
двигателя был бы равен моменту сопротив-
ления М
с
. Поэтому скорость будет
продолжать падать до тех пор, пока ток якоря
не станет равным статическому, затем
скорость начнет возрастать и после ряда колебаний достигнет установившегося
значения. Обратим внимание, что кривые ω = f(t) и I
я
= f(t) взаимосвязаны -
точкам максимума и минимума скорости, когда dω/dt = 0, соответствует мо-
мент пересечения кривой тока линии статического тока.
Если индуктивность якорной цепи невелика Т
я
>
1
/
4
Т
м
, то процесс сни-
жения скорости при приложении нагрузки будет иметь монотонный характер.
При постоянной величине U
я
передаточная функция электропривода по
возмущающему воздействию будет
1
)1(
)(
2
2
+
+
⋅
−=
Δ→
рТрRТС
ССR
рТС
R
pW
яям
Я
м
я
M
C
ω
, (8.27)
Выполнив преобразования, получим:
1
1
1
)(
2
++
+
−=
Δ→
рТрТТ
рТ
pW
мям
я
M
C
β
ω
(8.28)
где
я
RС /
2
=
β
- жесткость механической характеристики
электропривода.
Из выражения (8.28) следует, что при приложении нагрузки М
с
ско-
рость двигателя снизится на величину ∆ω
с
. По окончании переходного процес-
са (р=0) установившаяся ошибка будет
β
ω
с
с
М
=Δ
,
т.е. установившаяся величина снижения скорости (статическая ошибка
∆ω
с
) пропорциональна величине приложенного момента и обратно пропорцио-
нальна жесткости механической характеристики электропривода.
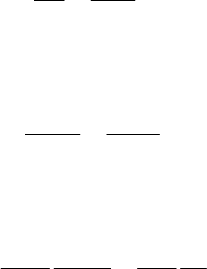
Как уже отмечалось в главе 4, для повышения точности регулирования
скорости применяются замкнутые системы регулирования с обратной связью
по скорости. Структурная схема электропривода по системе ТП-Д с обратной
связью по скорости представлена на рис.8.10. Тиристорный преобразователь
будем рассматривать как безинерционное звено с передаточным коэф-
фициентом к
п
. Передаточная функция по управляющему воздействию, состав-
ленная по схеме рис.8.10, будет:
1
)1(
)1(
1
)(
2
2
+
++
++
=
→
рТрТТС
ккк
рТрТТС
кк
pW
мям
спу
мям
пу
U
y
ω
Обозначим (к
у
к
п
к
с
)/С = К - коэффициент усиления разомкнутой систе-
мы (при разрыве обратной связи по скорости).
Тогда после преобразований получим:

1
11
1
)1(
)(
2
+
+
+
+
+
=
→
р
К
Т
рТ
К
Т
Кк
К
pW
м
я
м
с
U
y
ω
(8.29)
Передаточная функция показывает, что в замкнутой по скорости систе-
ме регулирования электромеханическая постоянная времени Т
м
, характери-
зующая инерционность механической части электропривода, как бы уменьша-
ется в (К+1) раз. Это связано с тем, что жесткость механических характеристик
β в замкнутой системе увеличивается в (К+1)раз, что было показано в разделе
4.
Это важное свойство - повышение быстродействия привода, - которое
дает отрицательная обратная связь по скорости, сопряжено с существенным
недостатком - возрастанием колебательности переходных процессов.
Обычно электромеханическая времени Т
м
больше, чем 4Т
я
, и в разомк-
нутой системе регулирование скорости во времени переходных процессов ко-
лебания не наблюдаются. Введение отрицательной обратной связи по скорости
уменьшает эквивалентную электромеханическую постоянную времени, причем
чем больше коэффициент обратной связи к
с
, тем меньше Т
м.экв
. Поэтому в замк-
нутых по скорости системах регулирования Т
м.экв
становится меньше 4Т
я
, и пе-
реходные процессы в электроприводе приобретают колебательный характер.
Для снижения колебательности в систему регулирования вводятся корректи-
рующие звенья. Способы формирования переходных процессов требуемого ха-
рактера рассмотрены в главе 10.
В общем случае можно предложить следующий порядок анализа пере-
ходных процессов в системах электропривода, если эти процессы описываются
линейными (или линеаризованными)
дифференциальными уравнениями.
1. Определяется, какие инерционности следует учитывать при анализе
данного переходного процесса.
2. Находят постоянные времени, характеризующие каждую инерцион-
ность. Если постоянные времени отличаются на 2 и более порядка, то меньши-
ми в инженерных расчетах, как правило, можно пренебречь.
3. Число инерционностей определяет порядок дифференциального
уравнения, описывающего переходный процесс.
4. Находят характеристическое уравнение, соответствующее левой час-
ти однородного линейного дифференциального уравнения, описывающего ис-
следуемый переходный процесс (см., например, (8.18)).
Переходный процесс в случае линейных зависимостей переменных и
скачкообразного (единичного) характера управляющего или возмущающего
воздействий будет описываться уравнением х = f(t), (где х - исследуемый
пара-
метр электропривода - ток, момент, скорость).
Задача 8.2. Определить, какой характер будут иметь переходные про-
цессы в электроприводе ТП-Д с разомкнутой и замкнутой по скорости систе-
мами регулирования.
Основные данные приводного двигателя постоянного тока: номиналь-
ное напряжение якоря U
ян
=220 В; сопротивление якорной цепи R
я
=0,6 Ом; ин-
дуктивность обмотки якоря L
я
=0,02 Гн; машинная постоянная C=l,9 В.c.; но-
минальная скорость ω
н
=104,5 1/с. Момент инерции привода L
Σ
=1,0 кг.м
2
.
Данные по системе управления U
y
изменяется от 0 до 10В; изменению
напряжения тиристорного преобразователя от 0 до 300В линейно соответствует
изменение напряжения, подаваемого на систему управления ТП - от 0 до 30В;
коэффициент обратной связи по скорости к
с
=0,09В.с.
Решение
1. Электромагнитная постоянная времени якорной цепи
с
R
L
Т
я
я
я
033,0
6,0
02,0
===
2. Электромеханическая постоянная времени
с
С
RJ
Т
я
м
16,0
9,1
6,01
22
=
⋅
==
Σ
3. Коэффициент усиления усилителя кур в разомкнутой системе
2,2
10
30
300
220
===
ун
уТПн
ТПн
ян
ур
U
U
U
U
к