Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Industrial Intelligent Robots 21.3 Intelligent Robots 355
this repetitive measurement using the 3-D vision
sensor.
Error Recovery
When building an automation system, it is desirable
to prevent errors that might stop the system before-
hand, but complete provisions to prevent errors are
impossible, and the occurrence of unexpected errors is
inevitable. For this reason, intelligent robots incorpo-
rate exception-handling functions that work in the event
of an error occurring. Exception handling analyzes the
cause of the error to recover the corresponding error
state. This prevents the fall in the operation rate of the
bin-picking system.
For instance, when a workpiece is taken out from
among those in the basket, the interference of the robot
and peripheral equipment might happen occasionally.
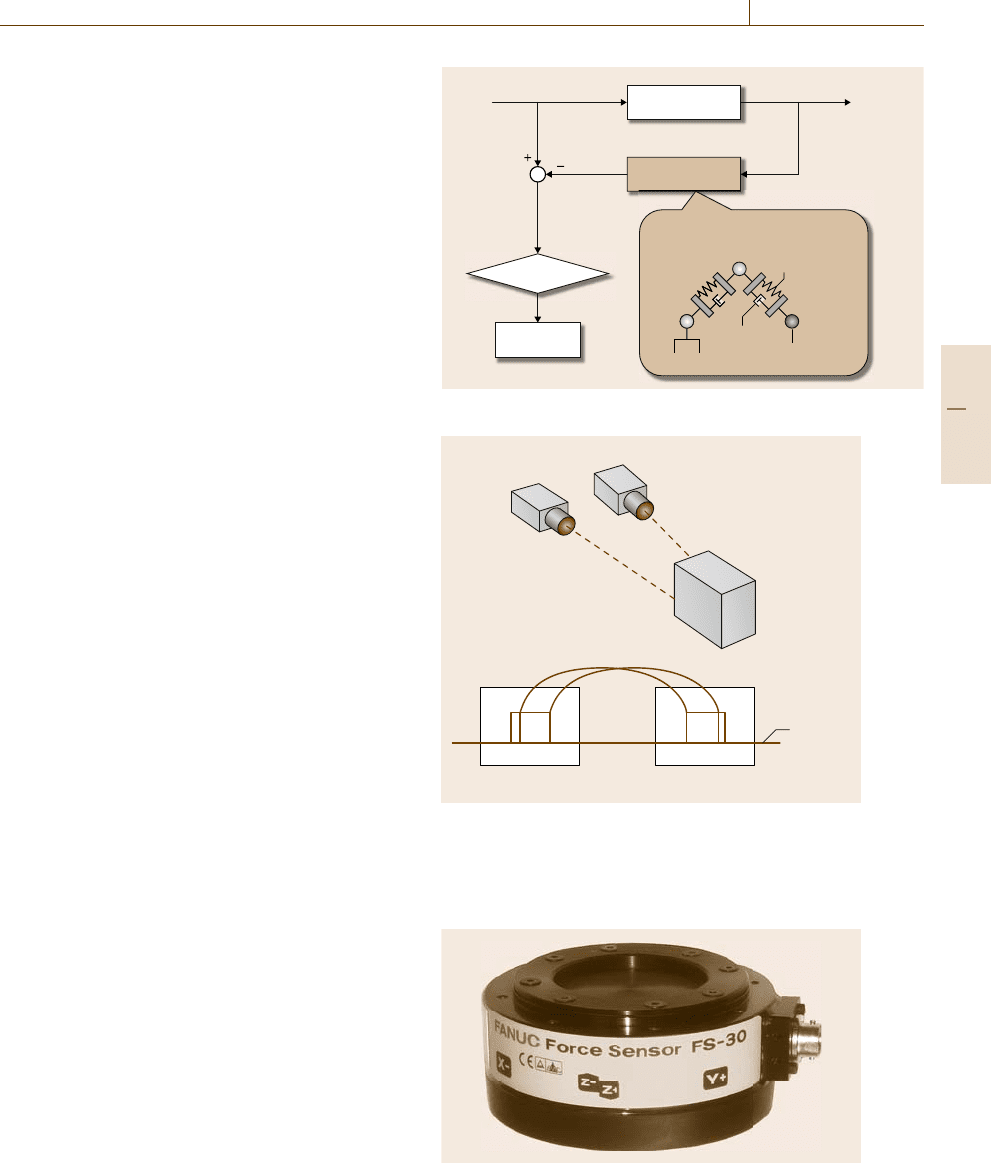
Then the robot controller with its high sensitivity col-
lision detection function, the details of which are shown
in Fig.21.13, detects the load suddenly added to the
robot by the interference, and stops the movement of
the robot instantaneously. The position and the posture
of the robot are retrieved, and it becomes possible for
the robot to continue to move afterwards. This function
prevents robot and peripheral equipment from being
damaged beforehand, and is useful for improving the
operation rate of the system.
The other 3-D vision method, the stereovision
method, uses images taken by two cameras, by match-
ing corresponding points on the left and right images
to calculate the objects’ 3-D position and posture
(Fig.21.14). Although it takes some time to match cor-
responding points, this method may be advantageous in
such a case where a mobile robot has to recognize its
surroundings, as there is no need to irradiate auxiliary
light as in the structured light method.
21.3.4 Force Sensors
A six-axis force sensor is used to give robots dexterity
by mounting it on the wrist of the robot arm. A force
sensor generally detects x-, y-, and z-direction forces
and each axis’ moment (a total of six degrees of free-
dom). The force sensor usually has a strain gauge on
the distortion part, which becomes distorted when ap-
plied with force or moment and makes it possible to
determine its value. Figure 21.15 shows an example
of the force sensor. The use of force sensors has en-
abled the robot to do such tasks as shaft fitting and
gear phase matching for precision machine parts assem-
bly, as well as deburring and polishing, which require
Motor (6 axis)
Input torque
Torque in
collision
Torque in
motion
Yes
Dynamics
Collision
Threshold?
Motor rotational
speed (6 axis)
Robot dynamic model
Spring factor
Mass
Damping
factor
Fig. 21.13 Collision detection
Left camera imageRight camera image
Epipolar
line
Object
Left
Right
CCD camera
Correspondence
point matching
Fig. 21.14 Stereovision method
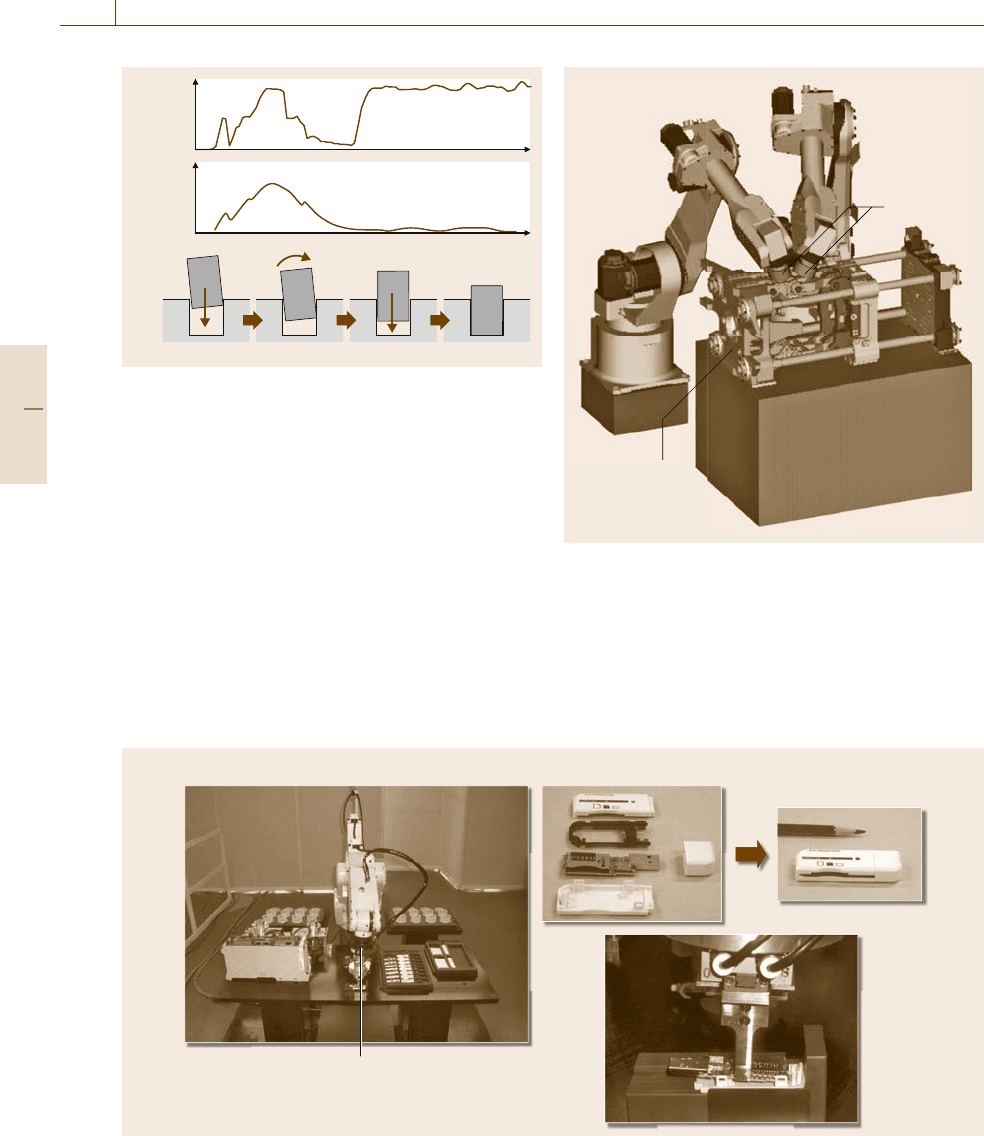
a certain pressure. Figure 21.16 shows the change of
the force and the moment in a peg-in-hole operation.
Fig. 21.15 Force sensor
Part C 21.3
356 Part C Automation Design: Theory, Elements, and Methods
Force
Moment
Peg
Hole
Fig. 21.16 Peg-in-hole with force sensor
Figure 21.17 shows an example of the assembly of the
crank mechanical unit of injection molding machine
with a force sensor. Figure 21.18 shows an example
of the assembly of small electronic devices with force
sensors.
21.3.5 Control Functions
Flexible Control Function of a Robot Arm
Conventional robots have difficulties in loading a cast-
ing workpiece accurately onto the chuck of a lathe or
the fixture of a machining center due to deviance in
position or posture of the casting deriving from the
casting’s dimensional dispersion. In die-casting, there
Small electronic device
Force sensor
Fig. 21.18 Assembly of small electronic device with a force sensor
Force sensor
Crank
mechanical unit
Fig. 21.17 Assembly of a crank mechanical unit with
a force sensor
is also the risk that the conventional robot arm with
a workpiece does not comply with the ejector motion
when the workpiece is drawn out from the die-mold
by the ejector. The robot arm’s flexible control func-
tion enables the robot to softly control its arm in the
Part C 21.3
Industrial Intelligent Robots 21.3 Intelligent Robots 357
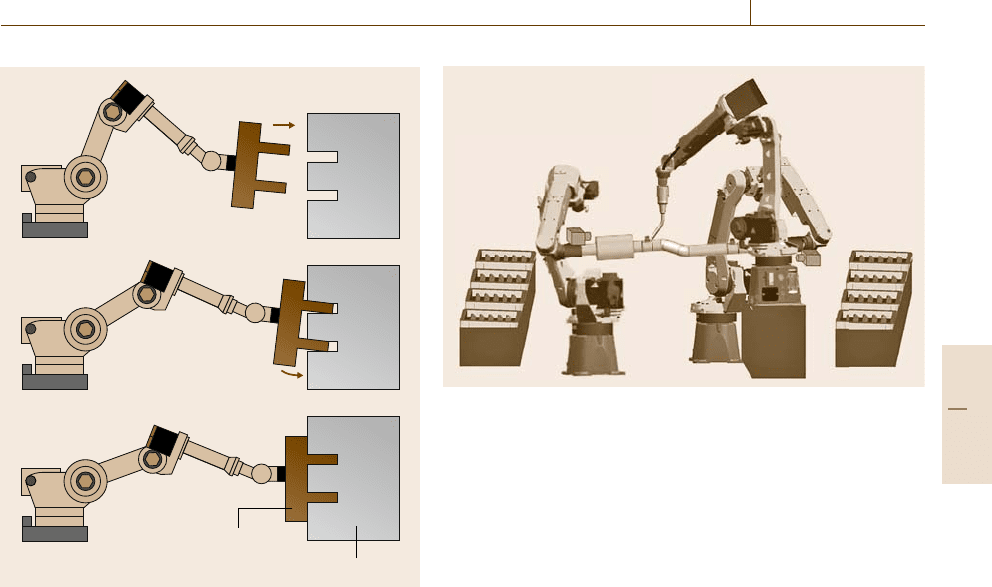
Machining fixture
Workpiece
Fig. 21.19 Robot arm and workpiece comply with the ma-
chining fixture so as to fit the workpiece to the fixture
designated direction in orthogonal coordinate systems.
It can thus accurately load a workpiece to the ma-
chine tool and draw out a workpiece from the die-mold
without any disturbing force in the die-casting opera-
tion. Figure 21.19 shows the flexible control function
of robot arm. It does not use any force sensors but
rather the current of the servomotors that drive the robot
arm.
Coordinated Control Function
of Multiple Robots
Coordinated operation by multiple robots has been
made possible by synchronizing robots connected to
each other via the Ethernet. This function, for exam-
ple, enables multiple robots to carry a heavy workpiece
such as a car body in coordination, where the weight
of the workpiece exceeds the payload capacity of
one robot. Also, a flexible system can be configured
as shown in Fig. 21.20, in which two robots rotate
a workpiece while gripping it, where the two robots
are used as rotating fixtures, and another robot arc-
welds the workpiece in coordination with other robots’
motion.
Robot #2
Workpiece
Robot #1
Robot #3
Fig. 21.20 Coordinated arc welding system with three robots
Collision Detection Function
Humans may have a sense of affinity with robots. How-
ever, robots are a highly rigid machine by nature, and
may cause heavy damage to human beings or other ma-
chines at the time of collision. In the latest robot control
technology, the drive power supply is immediately cut
when a robot collides with an object because it de-
tects the change in the servomotor current that drives
the robot arm. This minimizes the damage if a robot
collides with machines. Human beings must be sepa-
rated from the robot in space and/or time by such safety
means as fences.
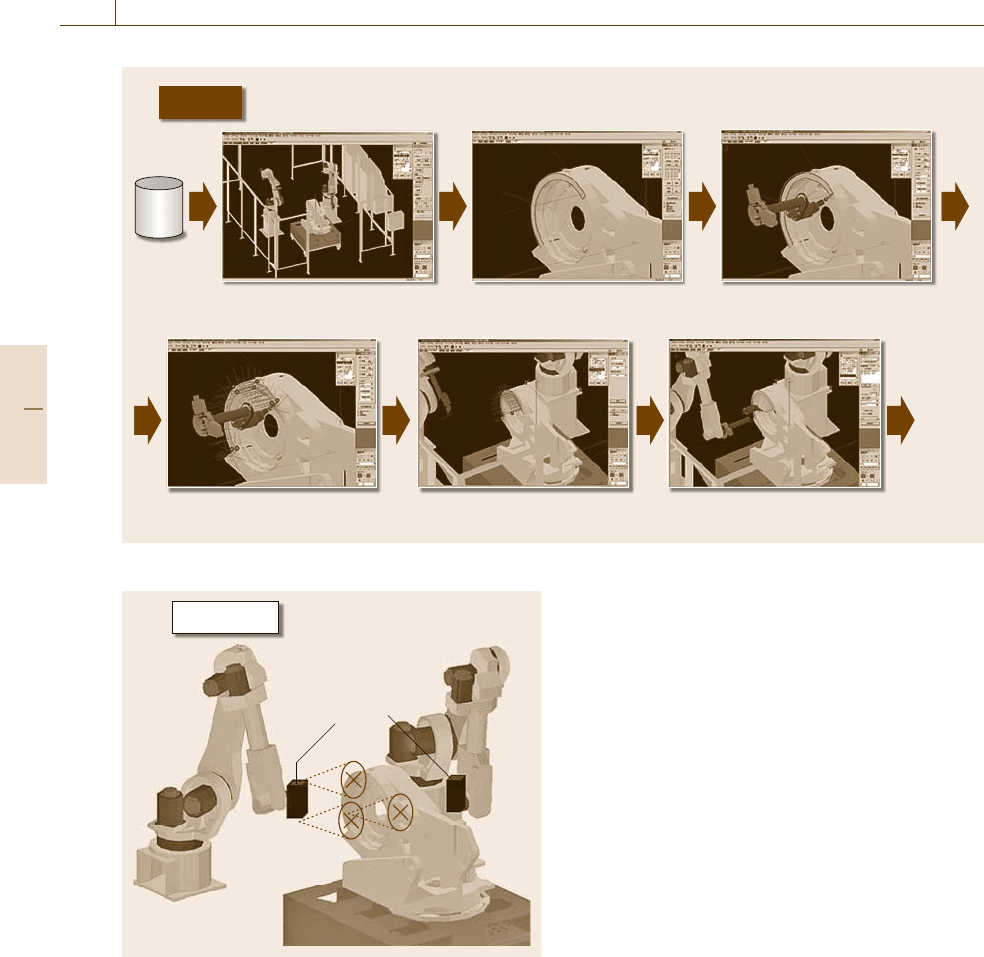
21.3.6 Offline Programming System
Offline programming systems have greatly contributed
to decreasing the robot’s programming hours as PC per-
formance has improved. There is usually a library of
robot models in the offline programming system. The
data of workpiece shapes, which hasrecently been com-
piled by using 3-D CAD systems, is read into the offline
programming system. Peripheral equipment is often de-
fined by using an easy shape generating function of the
offlineprogramming system,or byusing 3-DCAD data.
As shown in Fig.21.21, after loading the workpiece’s
3-D CAD data into the offline programming system,
the robot motion program can easily be generated au-
tomatically, just by designating the deburring path and
the posture of the deburring tool on the PC display.
However, the robot motion program automatically
generated on the PC cannot immediately operate the
robot on the production floor, as the positional relation
of the robot and the workpiece on the PC display is
Part C 21.3
358 Part C Automation Design: Theory, Elements, and Methods
Office
CAD
data
LayoutAutomatic detection
of deburring lines
Setting of tool
orientation
Automatic conversion
to teaching points
Setting of approach
points
Generation of robot
motion program
Transfer
to robot
Fig. 21.21 Deburring program generation by offline programming
Factory floor
3-D vision
sensor
Fig. 21.22 Measurement of workpiece position and posture
by the vision sensor
slightly different from that of the real robot and work-
piece on the production site. The latest technology in
robot vision sensors calculates the real workpiece’s po-
sition and posture on the production floor, enabling an
automatically generated program to be corrected au-
tomatically, as shown in Fig.21.22, thus significantly
decreasing the programming time for deburring.
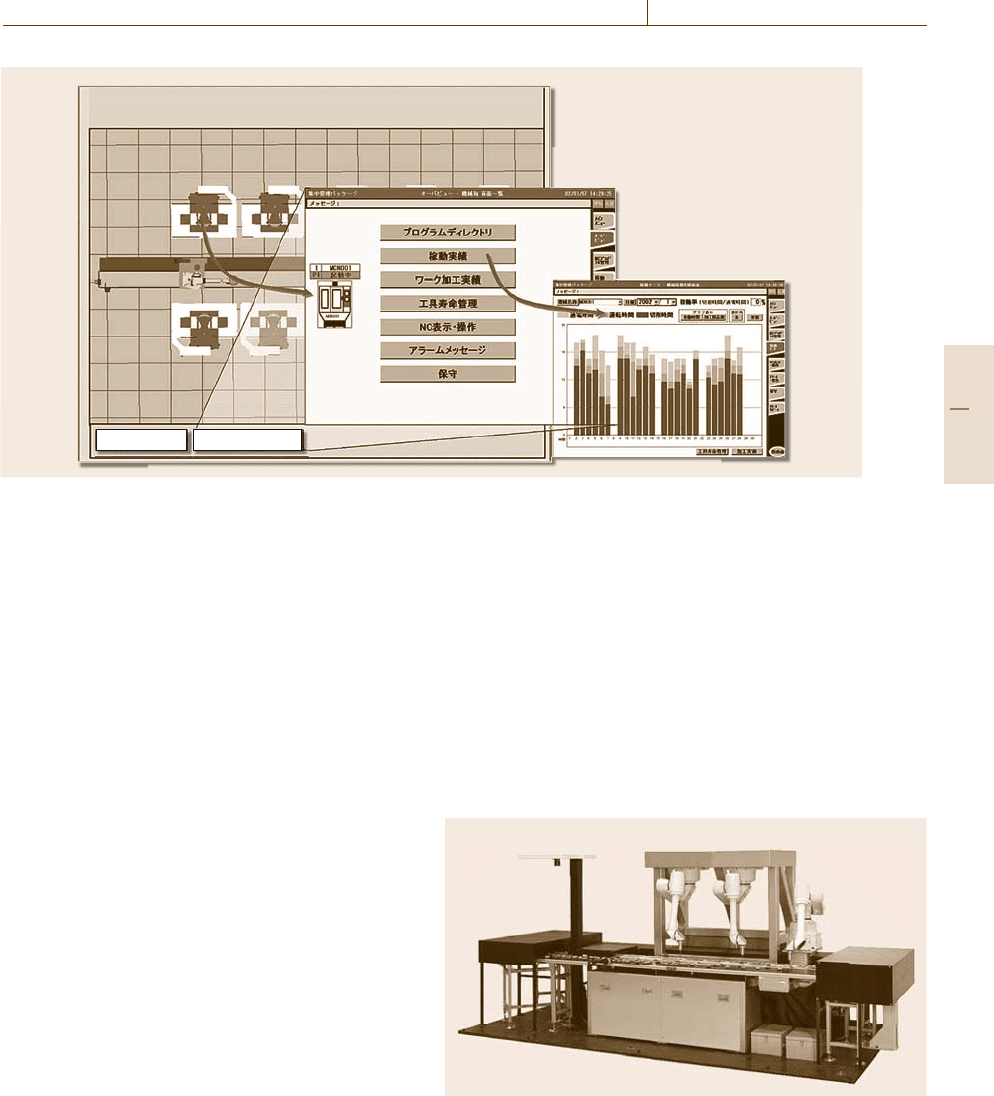
21.3.7 Real-Time Supervisory
and Control System
The real-time supervisory and control system is a soft-
ware package to monitor and control the production
system’s real time, which is generally called SCADA
(supervisory control and data acquisition). As shown
in Fig. 21.23, the system enables an operator to gener-
ate screens interactively, by making use of modularized
functions of data collection, graphical drawing and data
analysis software, as well as standard communication
network and common database.Various productiondata
including machining data and cycle time can be con-
trolled and analyzed from an office via the Ethernet,
which links the office computers with the CNC machine
tools and robots on the production floor. The plant man-
ager can directly access the production outcome and
operational status of machine tools and robots in the
plant he/she is responsible for via internet or by using
a mobile phone even during his/her travels abroad, to
give precise and timely directions. For a related discus-
sion see Chap.23 on programming real-time systems
for automation.
There is also a system available with a function
to strongly support finding causes of temporal system
stoppages during the system operation on the produc-
tion floor.
Part C 21.3
Industrial Intelligent Robots 21.4 Application of Intelligent Robots 359
Robot status RoboDrill status
Fanuc cimplicity/roboguide
Fig. 21.23 Real-time supervisory and control system
21.4 Application of Intelligent Robots
21.4.1 High-Speed Handling Robot
In the food and pharmaceutical handling field, there
has been a delay in robotic automation compared with
heavy workpiece handling, as the goods handled in this
field are relatively lighter, and as there is a stronger
requirement for higher-speed and continuous handling
operation. Figure 21.24 shows an example of the high-
speed handling by an intelligent robot, which can
operate continuously at high speeds, and is clean, wash-
able, and chemical proof. This robot adopts the dual
drive and torque tandem control method as shown in
Fig.21.25, the first case in robots, to achieve high-speed
and continuous operation. Each basic axis has two mo-
tors, and by optimally controlling these motors, high
acceleration/deceleration and continuous operation for
high duty performance are achieved.
Using the visual tracking function, which combines
a vision sensor and a tracking function, can increase
handling efficiency. With the vision function built into
the robot controller, the vision system has become
highly reliable for use on the production floor. With
its vision sensor the robot recognizes the position of
a workpiece coming on the conveyer and compensates
the robot motion trajectory by comparing the work-
piece’s position with the conveyor speed data received
from the pulse coder. Also, the system allocates han-
dling operations among multiple robots in order to
increase handling efficiency. Figure 21.24 shows the
visual tracking function by three high-speed handling
robots, which can handle 300parts/min.
Vision sensor
Fig. 21.24 Visual tracking system by high-speed handling robots
Part C 21.4
360 Part C Automation Design: Theory, Elements, and Methods
Speed control
Position control
Current control
Current control
Torque command
Main motor
J2
J2
J2
J1
J1
J1
J3
J3
J3
Sub motor
Fig. 21.25 Dual drive and torque tandem control
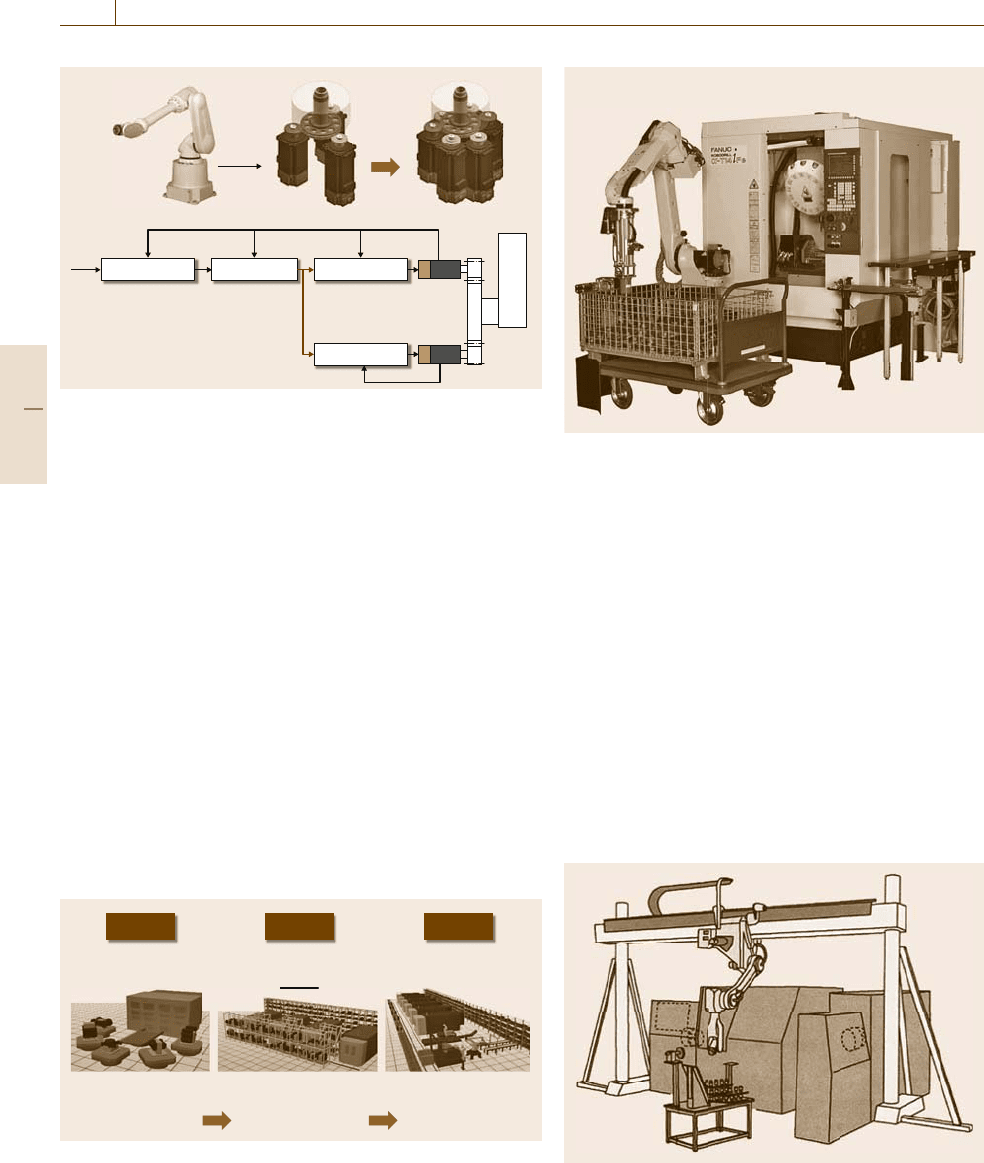
21.4.2 Machining Robot Cell –
Integration of Intelligent Robots
and Machine Tools
Generally, the machining system can reduce machining
costs by operating long hours continuously. The history
of machining system is summarized in Fig.21.26.
1. In the 1980s, a 24h continuous operation was
achieved by introducing a CNC machine tool sys-
tem equipped with pallet magazines (Fig.21.26a).
2. In the 1990s, a 72h continuous operation including
weekends was achieved by introducing a machining
system equipped with a large-scale multilayer pallet
stocker (Fig.21.26b).
3. In the 2000s, a robot cell system was developed
in which an intelligent robot directly loads work-
pieces to the machining fixtures of the machining
center, achieving 720 h per month, or 24h for
30days, continuous operation. The intelligent robot
1980s
1980s
1990s
1990s
2000s
2000s
Pallet magazine Large-scale
multilayer pallet
stocker
Intelligent robot
– robot cell –
24 hours continuous
operation
72 hours continuous
operation
720 hours continuous
operation
1st Generation 2nd Generation 3rd Generation
a) b) c)
stocke
r
Fig. 21.26a–c A trend in systems for long hours of continuous ma-
chining
Intelligent robot
RoboDrill
Fig. 21.27 Mini robot cell. Decreases machining cost of
long hours of continuous machining drastically
compensates the deviation in its gripping of the
workpiece, resulting from the dimensional varia-
tion of the casting, with its 3-D vision sensor. Also,
the workpiece is loaded to the machining fixture
with precision, because the workpiece is pressed
softly to the surface of the fixture by controlling
the robot arm softly as shown in Fig. 21.19. The
robot cell can substantially reduce labor and ma-
chining costs, as well as initial capital investment
(Fig.21.26c).
Figure 21.27 shows a mini robot cell comprised of
a CNC drill and an intelligent robot, in which the intel-
ligent robot loads and unloads workpieces to and from
the CNC drill, and measures the dimensions of the ma-
Fig. 21.28 Top mount loader robot
Part C 21.4
Industrial Intelligent Robots 21.4 Application of Intelligent Robots 361
Fig. 21.29 Big robot
chined workpieces. An operator carries a basket filled
with workpieces in front of the robot. The intelligent
robot with a vision sensor picks up a workpiece from
among those randomly placed in the basket and loads
it to the drill. This robotic system eliminates dedicated
workpiece supply equipment, as well as the manual
work by human operators to array workpieces on it.
Mini robot cells are available from the minimum
configuration of one machine tool and one intelligent
robot to a system with multiple machine tools and
robots, meeting the various requirements of users. In
the case where multiple machine tools work on a work-
piece for different machining processes, there is also
a system in which a mobile intelligent robot runs be-
tween the machine tools to transfer the workpiece as
showninFig.21.28.
Until now, a heavy workpiece of about 1000kg had
to be handled by the coordination of more than two
robots, and workers had to use the crane to handle the
heavy workpiece. A big intelligent robot, whose pay-
load is about 1000kg appeared recently. This robot can
simplify the robot cell as shown in Fig.21.29.
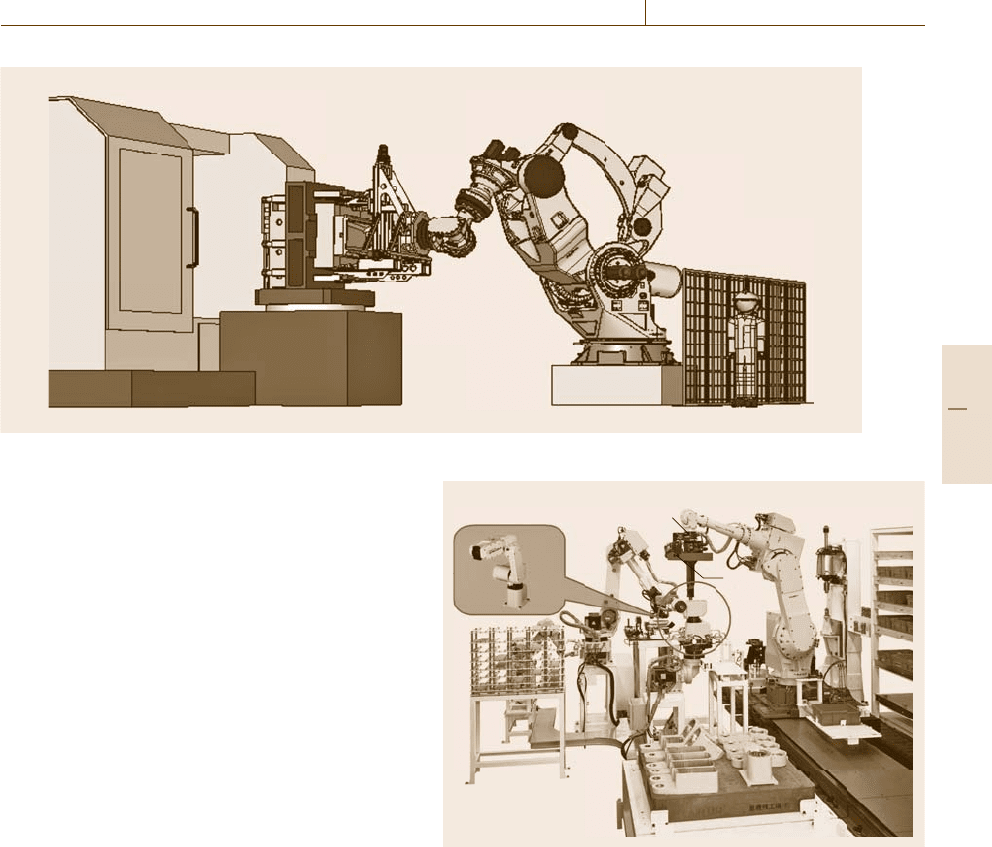
21.4.3 Assembly Robot Cell
Intelligent robots are also expected to take an active
role in the assembly job, which comprises as large
Mini robot Intelligent
robot
Intelligent robot
Force
sensor
Vision
sensor
Fig. 21.30 Assembly robot cell
a part of the machine industry as the machining job.
The intelligent robot can perform highly accurate as-
sembly jobs, picking up a workpiece from randomly
piled workpieces on a tray, assembling it with the
fitting precision of 10μm or less clearance with its
force sensor. Figure 21.30 shows an assembly robot
cell in which intelligent robots are assembling mini
robots.
Part C 21.4
362 Part C Automation Design: Theory, Elements, and Methods
21.5 Guidelines for Installing Intelligent Robots
The following items are guidelines that should
be examined before an intelligent robot is intro-
duced.
21.5.1 Clarification of the Range
of Automation by Intelligent Robots
Though the intelligent robot loads workpieces to the
machine tool and assembles parts with high accuracy,
it cannot do everything a skilled worker can do. For in-
stance, the task such as the assembly of a flexible thing
belongs to a field in which humans are more skillful
than intelligent robots. It is necessary to clearly sep-
arate the range that can be automated from the range
that relies on skilled workers before the introduction of
intelligent robots.
21.5.2 Suppression
of Initial Capital Investment Expense
The effect of the introduction of intelligent robots arises
if the peripheral equipment can be simplified by mak-
ing use of flexibility that is one of the major features
of intelligent robots. This effect weakens if the initial
capital investment expense is not suppressed due to an
easy increase of the expense for peripheral equipment
compared with that of the automation that does not use
intelligent robots.
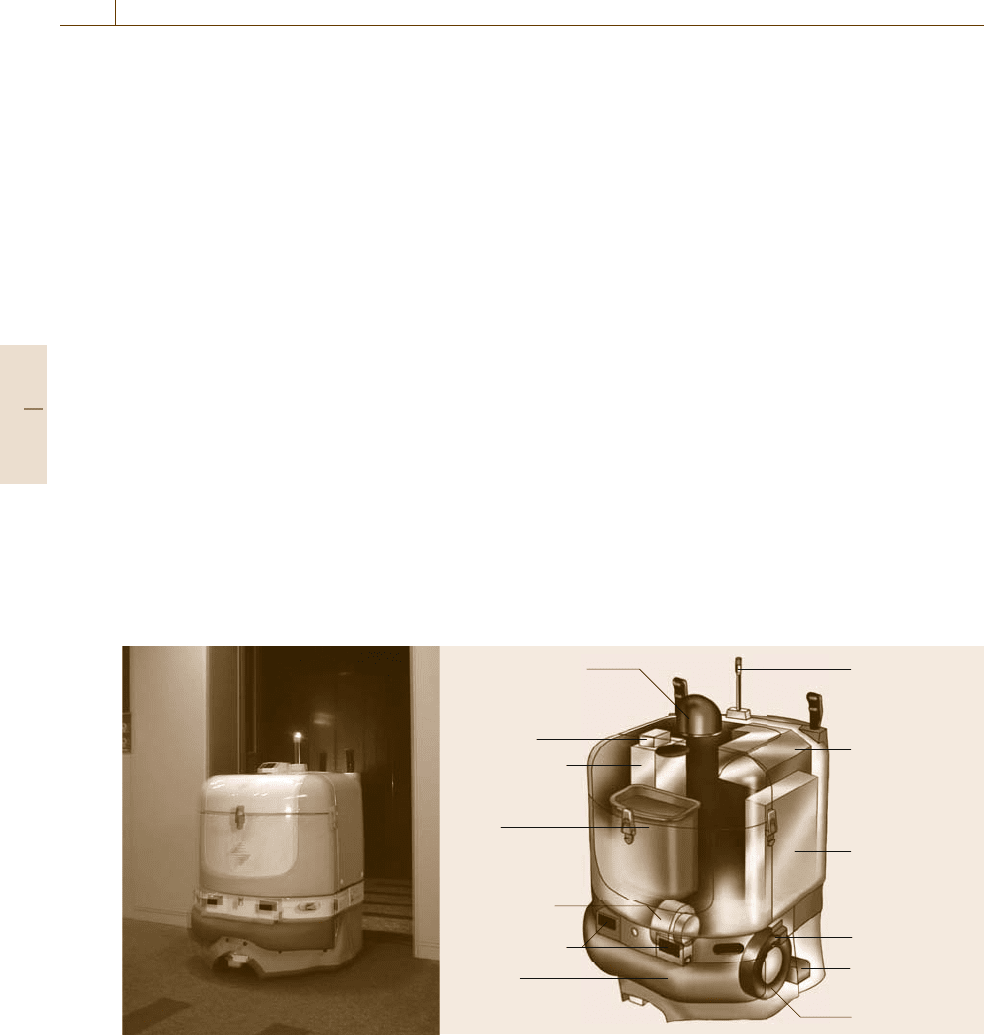
21.6 Mobile Robots
Figure 21.31 shows an autonomous mobile cleaning
robot. The robot is mainly used for floor-cleaning in
skyscrapers. It moves between stories by operating the
elevator by itself, and cleans the floors at night. It au-
Main controller
Gyroscope
Optical transmitter
Filter
Obstacle sensor
Bumper
Drive wheel
Obstacle sensor
Blower motor
Motor controller
Cleaning
apparatus driver
Running indicator
light
Suction nozzle
with power brush
Fig. 21.31 Autonomous mobile cleaning robot (source: Fuji Heavy Industries Ltd.)
tonomously returns to the start position after it has
worked.More than 10 cleaning systems using the robots
have already been introduced into several skyscrapers in
Japan.
Part C 21.6

Industrial Intelligent Robots References 363
21.7 Conclusion
The intelligent robot appeared on the factory floor
at the beginning of 2000 and has vision and force
sensors. It can work unattended at night and during hol-
idays because it reduces manual preparations such as
arrangement of workpieces and/or the necessity of sys-
tem monitoring compared with the conventional robot.
Thus, the use efficiency of equipment rises, machin-
ing and assembly costs can be reduced, and the global
competitiveness of a product can be improved.
The industrial intelligent robots still have tasks
in which they cannot compete with skilled workers,
though they have a high level of skills, as has been
explained so far. The assembly task of flexible objects
such as wire-harnesses is one such task. There are sev-
eral on-going research and development activities in the
world to solve these challenges. One idea is to automate
such a task completely, and another is to do it partially.
In the latter case, robots and skilled workers work to-
gether; robots assemble mechanical parts and skilled
workers assemble flexible parts, for example. In any
case, the degree of cooperation between humans and
robots will increase in the near future.
21.8 Further Reading
•
Y. Bar-Cohen, C. Breazeal: Biologically Inspired In-
telligent Robots (SPIE Press, Bellingham 2003)
•
G.A. Bekey: Autonomous Robots: From Biologi-
cal Inspiration toImplementation and Control (MIT
Press, Cambridge 2005)
•
J.M. Holland: Designing Autonomous Mobile
Robots: Inside the Mind of an Intelligent Machine
(Newnes, Amsterdam 2003)
•
S.C. Mukhopadhyay, G.S. Gupta: Autonomous
Robots and Agents (Springer, New York 2007)
•
S.Y. Nof (Ed.): Handbook of Industrial Robotics
(Wiley, New York 1999)
•
R. Siegwart, I.R. Nourbakhsh: Introduction to Au-
tonomous Mobile Robots (MIT Press, Cambridge
2004)
•
P. Stone: Intelligent Autonomous Robotics: A Robot
Soccer Case Study (Morgan Claypool, San Rafael
2007)
References
21.1 D.E. Whitney: Historical perspective and state of
the art in robot force control, Proc. IEEE Int. Conf.
Robot. Autom. ICRA (1985)
21.2 T. Suehiro, K. Takase: Skill based manipulation
system, J. Robot. Soc. Jap. 8(5), 551–562 (1990)
21.3 M.T. Mason: Compliance and force control for com-
puter controlled manipulators, IEEE Trans. Syst.
Man Cybern. 11(6), 418–432 (1981)
21.4 N. Hogan: Impedance control, Part 1–3, Trans. ASME
J. Dyn. Syst. Meas. Control 107, 1–24 (1985)
21.5 J.J. Craig, P. Hsu, S. Sastry: Adaptive control of
mechanical manipulators, Int. J. Robot. Res. 6(2),
16–28 (1987)
21.6 B. Yao, M. Tomizuka: Adaptive coordinated control
of multiple manipulators handling a constrained
object, Proc. IEEE Conf. Robot. Autom. (1993)
21.7 S. Inaba: Assembly of robots by AI robot, Proc.
22nd IEEE IECON (Int. Conf. Ind. Electron. Control
Instrum.), Vol. 1 (1996) pp. xxxvii–xl
21.8 S. Sakakibara, A. Terada, K. Ban: An innovative
automatic assembly system where a two-armed
intelligent robot builds mini robots, Proc. 27th ISIR
(1996) pp. 937–942
21.9 S. Sakakibara: Intelligent assembly system suited
for module assembly, Proc. 30th ISR (1999) pp. 385–
390
21.10 S. Sakakibara: The role of intelligent robot in man-
ufacturing system of the 21st century, Proc. 32nd ISR
(2001)
21.11 K. Hariki, K. Yamanashi, K. Otsuka, M. Oda: In-
telligent robot cell, FANUC Tech. Rev. 16(1), 37–42
(2003)
Part C 21
“This page left intentionally blank.”