Myint Tyn U., Debnath L. Linear Partial Differential Equations for Scientists and Engineers
Подождите немного. Документ загружается.

3.4 Waves in an Elastic Medium 71
∂τ
yx
∂x
+
∂τ
yy
∂y
+
∂τ
yz
∂z
= ρ
∂
2
v
∂t
2
, (3.4.4)
∂τ
zx
∂x
+
∂τ
zy
∂y
+
∂τ
zz
∂z
= ρ
∂
2
w
∂t
2
, (3.4.5)
where v and w are the displacement components in the y and z d irections
respectively.
We may now define linear strains [see Sokolnikoff (1956)] as
ε
xx
=
∂u
∂x
,ε
yz
=
1
2
∂w
∂y
+
∂v
∂z
,
ε
yy
=
∂v
∂y
,ε
zx
=
1
2
∂u
∂z
+
∂w
∂x
, (3.4.6)
ε
zz
=
∂w
∂z
,ε
xy
=
1
2
∂v
∂x
+
∂u
∂y
,
in which ε
xx
, ε
yy
, ε
zz
represent unit elongations and ε
yz
, ε
zx
, ε
xy
represent
unit shearing strains.
In the case of an isotropic body, generalized Hooke’s law takes the form
τ
xx
= λθ +2µε
xx
,τ
yz
=2µε
yz
,
τ
yy
= λθ +2µε
yy
,τ
zx
=2µε
zx
, (3.4.7)
τ
zz
= λθ +2µε
zz
,τ
xy
=2µε
xy
,
where θ = ε
xx
+ ε
yy
+ ε
zz
is called the dilatation,andλ and µ are Lame’s
constants.
Expressing stresses in terms of displacements, we obtain
τ
xx
= λθ +2µ
∂u
∂x
,
τ
xy
= µ
∂v
∂x
+
∂u
∂y
, (3.4.8)
τ
xz
= µ
∂w
∂x
+
∂u
∂z
.
By differentiating equations (3.4.8), we obtai n
∂τ
xx
∂x
= λ
∂θ
∂x
+2µ
∂
2
u
∂x
2
,
∂τ
xy
∂y
= µ
∂
2
v
∂x∂y
+ µ
∂
2
u
∂y
2
, (3.4.9)
∂τ
xz
∂z
= µ
∂
2
w
∂x∂z
+ µ
∂
2
u
∂z
2
.
Substituting equation (3.4.9) into equation (3.4.3) yields
72 3 Mathematical Models
λ
∂θ
∂x
+ µ
∂
2
u
∂x
2
+
∂
2
v
∂x∂y
+
∂
2
w
∂x∂z
+ µ
∂
2
u
∂x
2
+
∂
2
u
∂y
2
+
∂
2
u
∂z
2
= ρ
∂
2
u
∂t
2
.
(3.4.10)
We note that
∂
2
u
∂x
2
+
∂
2
v
∂x∂y
+
∂
2
w
∂x∂z
=
∂
∂x
∂u
∂x
+
∂v
∂y
+
∂w
∂z
=
∂θ
∂x
,
and introduce the notation
△ = ∇
2
=
∂
2
∂x
2
+
∂
2
∂y
2
+
∂
2
∂z
2
.
The symbol △ or ∇
2
is called the Laplace operator. Hence, equation (3.4.10)
becomes
(λ + µ)
∂θ
∂x
+ µ∇
2
u = ρ
∂
2
u
∂t
2
. (3.4.11)
In a similar manner, we obtain the other two equations which are
(λ + µ)
∂θ
∂y
+ µ∇
2
v = ρ
∂
2
v
∂t
2
. (3.4.12)
(λ + µ)
∂θ
∂z
+ µ∇
2
w = ρ
∂
2
w
∂t
2
. (3.4.13)
The set of equations (3.4.11)–(3.4.13) is called the Navier equations of mo-
tion. In vector form, the Navier equations of motion assume the form
(λ + µ)grad divu + µ∇
2
u = ρ u
tt
, (3.4.14)
where u = ui + vj + w k and θ =divu.
(i) If div u = 0, the general equation becomes
µ∇
2
u = ρ u
tt
,
or
u
tt
= c
2
T
∇
2
u, (3.4.15)
where c
T
is called the transverse wave velocity given by
c
T
=
µ/ρ.
This is the case of an equivoluminal wave propagation, since the volume
expansion θ is zero for waves moving with this velocity. Sometimes these
waves are called waves of distortion because the velocity of propagation
depends on µ and ρ; the shear modulus µ characterizes the distortion and
rotation of the volume element.

3.4 Waves in an Elastic Medium 73
(ii) When curl u = 0, the vector identity
curl curl u =graddivu −∇
2
u,
gives
grad div u = ∇
2
u,
Then the general equation becomes
(λ +2µ) ∇
2
u = ρ u
tt
,
or
u
tt
= c
2
L
∇
2
u, (3.4.16)
where c
L
is called the longitudinal wave velocity given by
c
L
=
$
λ +2µ
ρ
.
This is the case of irrotational or dilatational wave propagation, since
curl u = 0 describes irrotational motion. Equations (3.4.15) and (3.4.16)
are called the three-dimensional wave equations.
In general, the wave equation may be written as
u
tt
= c
2
∇
2
u, (3.4.17)
where the Laplace operator may be one, two, or three dimensional. The
importance of the wave equation stems from the facts that this type of
equation arises in many physical problems; for example, sound waves in
space, electrical vibration in a conductor, torsional oscillation of a rod,
shallow water waves, linearized supersonic flow in a gas, waves in an elec-
tric transmission line, waves in magnetohydrodynamics, and longitudinal
vibrations of a bar.
To give a more general method of decomposing elastic waves into trans-
verse and longitudinal wave forms, we write the Navier equations of motion
in the form
c
2
T
∇
2
u +
c
2
L
− c
2
T
grad (div u)=u
tt
. (3.4.18)
We now decompose this equation into two vector equations by defining
u = u
T
+ u
L
,whereu
T
and u
L
satisfy the equations
div u
T
= 0 and curl u
L
= 0. (3.4.19ab)
Since u
T
is defined by (3.4.19a) that is divergenceless, it follows from vector
analysis that there exists a rotation vector ψ
ψ
ψ such that
74 3 Mathematical Models
u
T
=curlψ
ψ
ψ, (3.4.20)
where ψ
ψ
ψ is called the vector potential.
On the other hand, u
L
is irrotational as given by (3.4. 19b), so there
exists a scalar function φ (x,t), called th e scalar potential such that
u
L
=gradφ. (3.4.21)
Using (3.4.20) and (3.4.21), we can write
u =curlψ
ψ
ψ +gradφ. (3.4.22)
This means that the displacement vector field is decomposed into a diver-
genceless vector and irrotati onal vector.
Inserting u = u
T
+ u
L
into (3.4.18), taking the divergence of each term
of the resulting equation, and then using (3.4.19a) gives
div
c
2
L
∇
2
u
L
− (u
L
)
tt
!
=0. (3.4.23)
It is noted that the curl of the square bracket in (3.4.23) is also zero.
Clearly, any vector whose divergence and curl both vanish is identically a
zero vector. Consequently,
c
2
L
∇
2
u
L
=(u
L
)
tt
. (3.4.24)
This shows that u
L
satisfies the vector wave equation with the wave velocity
c
L
.Sinceu
L
=gradφ, it is clear that the scalar potential φ also satisfies the
wave equation with the same wave speed. All solutions of (3.4.24) represent
longitudinal waves that are irrotational (since ψ
ψ
ψ = 0).
Similarly, we substitute u = u
L
+ u
T
into (3.4.18), take the curl of the
resulting equation, and use the fact that cur l u
L
= 0 to obtain
curl
c
2
T
∇
2
u
T
− (u
T
)
tt
!
= 0. (3.4.25)
Since the di vergence of the expression inside the square bracket is also zero,
it follows that
c
2
T
∇
2
u
T
=(u
T
)
tt
. (3.4.26)
This is a vector wave equation for u
T
whose solutions represent transverse
waves that are irrotational but are accompanied by no change in volume
(equivoluminal, transverse, rotational waves). These waves propagate with
awavevelocityc
T
.
We close this section by seeking time-harmonic solutions of (3.4.18) in
the form
u =Re
U (x, y, z) e
iω t
!
. (3.4.27)

3.5 Conduction of Heat in Solids 75
Invoking (3.4.27) into equation (3.4.18) gives the following equation for
the function U
c
T
∇
2
U +(c
L
− c
T
)grad(div U)+ω
2
U =0. (3.4.28)
Inserting, u = u
T
+ u
L
, and using the above method of taking the
divergence and curl of (3.4.28) respectively leads to equation for U
L
and
U
T
as follows
∇
2
U
L
+ k
2
L
∇
2
U
L
=0, ∇
2
U
T
+ k
2
T
U
T
=0, (3.4.29)
where
k
2
L
=
ω
2
c
2
L
and k
2
T
=
ω
2
c
2
T
. (3.4.30)
Equations (3.4.29) are called the reduced wave equations (or the Helmholtz
equations)forU
L
and U
T
. Obviously, equations (3.4.29) can also be de-
rived by assuming time-harmonic solutions for u
L
and u
T
in the form
⎛
⎝
u
L
u
T
⎞
⎠
= e
iω t
⎛
⎝
U
L
U
T
⎞
⎠
, (3.4.31)
and substituting these results into (3.4.24) and (3.4.26) respectively.
3.5 Conduction of Heat in Solids
We consider a domain D
∗
bounded by a closed surface B
∗
.Letu (x, y, z, t)
be the temperature at a point (x, y, z)attimet. If the temperature is not
constant, heat flows from places of higher temperature to places of lower
temperature. Fourier’s law states that the rate of flow is proportional to
the gradient of the temperature. Thus the velocity of the heat flow in an
isotropic body is
v = −Kgradu, (3.5.1)
where K is a constant, called the thermal conductivity of the body.
Let D be an arbitr ary domain bounded by a closed surface B in D
∗
.
Then the amount of heat leaving D per unit time is
B
v
n
ds,
where v
n
= v · n is the component of v in the direction of the outer un it
normal n of B. Thus, by Gauss’ theorem (Divergence theorem)

76 3 Mathematical Models
B
v
n
ds =
D
div (−Kgradu) dx dy dz
= −K
D
∇
2
udxdydz. (3.5.2)
But the amount of heat in D is given by
D
σρu dxdy dz, (3.5.3)
where ρ is the density of the material of the body and σ is its specific heat.
Assuming that integration and differentiation are interchangeable, the rate
of decrease of heat in D is
−
D
σρ
∂u
∂t
dx dy dz. (3.5.4)
Since the rate of decrease of heat in D must be equal to the amount of heat
leaving D per unit time, we have
−
D
σρu
t
dx dy dz = −K
D
∇
2
udxdydz,
or
−
D
σρu
t
− K∇
2
u
!
dx dy dz =0, (3.5.5)
for an arbitrary D in D
∗
. We assume that the integrand is continuous. If we
suppose that the integrand is not zero at a point (x
0
,y
0
,z
0
)inD, then, by
continuity, the integrand is not zero in a small region surrounding the point
(x
0
,y
0
,z
0
). Continuing in this fashion we extend the region encompassing
D. Hence th e integral must be nonzero. This contradicts (3.5.5). Thus, the
integrand is zero everywhere, that is,
u
t
= κ∇
2
u, (3.5.6)
where κ = K/σρ. This is kn own as the heat equation.
This type of equation appears in a great variety of problems in math-
ematical physics, for example the concentration of diffusing material, the
motion of a t idal wave in a long channel, transmission in electrical cables,
and unsteady boundary layers in viscous fluid flows.
3.6 The Gravitational Potential
In this section, we shall derive one of the most well-known equations in the
theory of partial differential equations, the Laplace equation.
3.6 The Gravitational Potential 77
Figure 3.6.1 Two particles at P and Q.
We consider two particles of masses m and M,atP and Q as shown
in Figure 3.6.1. Let r be the distance between them. Then, according to
Newton’s law of gravitation, a force proportional to the product of their
masses, and inversely proportional to the square of th e distance between
them, is given in the form
F = G
mM
r
2
, (3.6.1)
where G is the gravitational constant.
It is customary in potential theory to choose the unit of force so that
G =1.Thus,F becomes
F =
mM
r
2
. (3.6.2)
If r represents the vector PQ, the force per unit mass at Q due to the mass
at P may be written as
F =
−mr
r
3
= ∇
m
r
, (3.6.3)
which is called the intensity of the gravitational field of force.
We supp ose that a particle of unit mass moves under the attraction of
the particle of mass m at P from infinity up to Q. The work done by the
force F is
78 3 Mathematical Models
r
∞
Fdr =
r
∞
∇
m
r
dr =
m
r
. (3.6.4)
This is called the potential at Q due to the particle at P . We denote this
by
V = −
m
r
, (3.6.5)
so that the intensity of force at P is
F = ∇
m
r
= −∇V. (3.6.6)
We shall now consider a number of masses m
1
, m
2
, ..., m
n
,whose
distances from Q are r
1
, r
2
, ..., r
n
, respectively. Then the force of attraction
per unit mass at Q due to the system is
F =
n
k=1
∇
m
k
r
k
= ∇
n
k=1
m
k
r
k
. (3.6.7)
The work done by the forces acting on a particle of unit mass is
r
∞
F · dr =
n
k=1
m
k
r
k
= −V. (3.6.8)
Then the potential satisfies the equation
∇
2
V = −∇
2
n
k=1
m
k
r
k
= −
n
k=1
∇
2
m
k
r
k
=0,r
k
=0. (3.6.9)
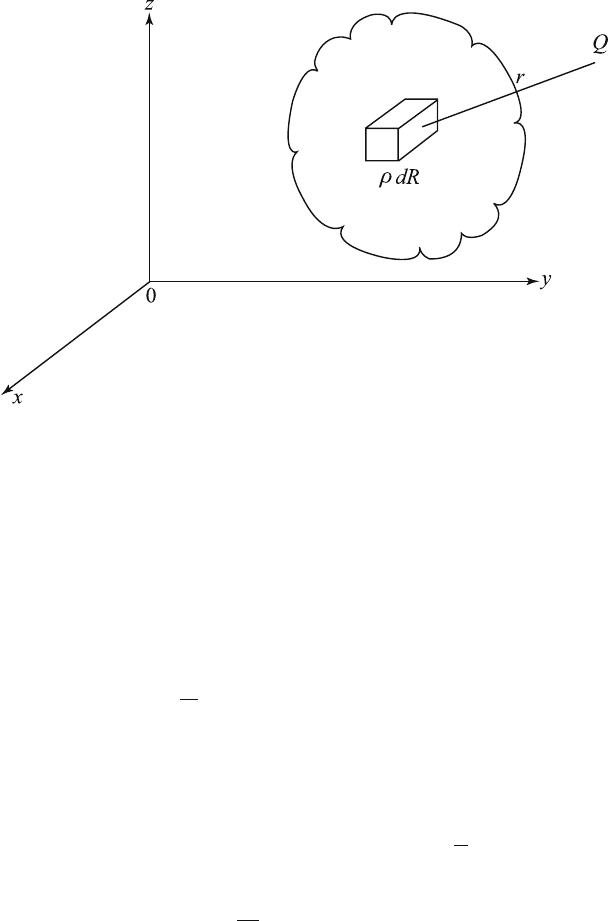
In the case of a continuous distribution of mass in some volume R,wehave,
as in Figure 3.6.2.
V (x, y, z)=
R
ρ (ξ, η,ζ)
r
dR, (3.6.10)
where r =
%
(x − ξ)
2
+(y − η)
2
+(z − ζ)
2
and Q is outside the body. It
immediately follows that
∇
2
V =0. (3.6.11)
This equation is called the Laplace equation, also known as the potential
equation. It appears in many physical problems, such as those of electro-
static potentials, potentials in hydrodynamics, and harmonic potentials in
the theory of elasticity. We observe that the Laplace equation can be viewed
as the special case of the heat and the wave equations when the dependent
variables involved are independent of time.
3.7 Conservation Laws and The Burgers Equation 79
Figure 3.6.2 Continuous Mass Distribution.
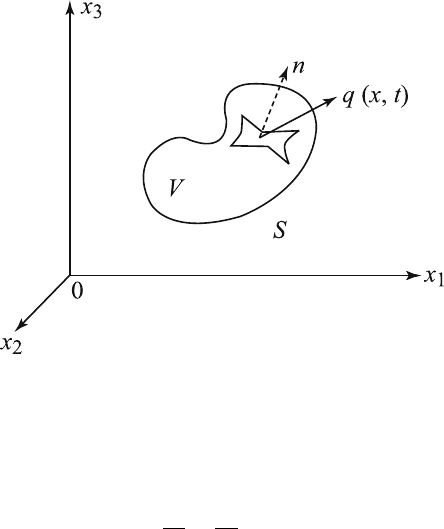
3.7 Conservation Laws and The Burgers Equat io n
A conservation law states that the rate of change of the total amount of
material contained in a fixed domain of volume V is equal to the flux of
that material across the closed bounding surface S of the domain. If we
denote the density of the material by ρ (x,t) and the flux vector by q (x,t),
then the conservation law is given by
d
dt
V
ρdV = −
S
(q · n) dS, (3.7.1)
where dV is the volume element and dS is the surface element of the bound-
ary surface S, n denotes the outward unit normal vector to S as shown in
Figure 3.7.1, and the right-hand side measures the outward flu x — hence,
the minus sign is used.
Applying the Gauss divergence theorem and taking
d
dt
inside the integral
sign, we obtain
V
∂ρ
∂t
+divq
dV =0. (3.7.2)
This result is true for any arbitrary volume V , and, if the integrand is
continuous, it must vanish everywhere in the domain. Thus, we obtain the
differential form of the conservation law
ρ
t
+divq =0. (3.7.3)
80 3 Mathematical Models
Figure 3.7.1 Volume V of a closed domain bounded by a surface S with surface
element d S and outward normal vector n.
The one-dimensional version of the conservation law (3.7.3) is
∂ρ
∂t
+
∂q
∂x
=0. (3.7.4)
To investigate the nature of the discontinuous solution or shock waves,
we assume a functional relation q = Q (ρ) and allow a jump discontinuity
for ρ and q. In many physical problems of interest, it would be a better
approximation to assume that q is a function of the density gradient ρ
x
as
well as ρ. A simple model is to take
q = Q (ρ) − νρ
x
, (3.7.5)
where ν is a positive constant. Substituting (3.7.5) into (3.7.4), we obtain
the nonlinear diffusion equation
ρ
t
+ c (ρ) ρ
x
= νρ
xx
, (3.7.6)
where c (ρ)=Q
′
(ρ).
We multiply (3.7.6) by c
′
(ρ) to obtain
c
t
+ cc
x
= νc
′
(ρ) ρ
xx
,
= ν
&
c
xx
− c
′′
(ρ) ρ
2
x
'
. (3.7.7)
If Q (ρ) is a quadratic function in ρ,thenc (ρ) is linear in ρ,andc
′′
(ρ)=0.
Consequently, (3.7.7) becomes
c
t
+ cc
x
= νc
xx
. (3.7.8)