Murray J.D. Mathematical Biology: I. An Introduction
Подождите немного. Документ загружается.

26 1. Continuous Population Models for Single Species
that the period of the growing unstable solution is approximately 4T .Thisisleftasan
exercise (Exercise 6).
In fact, the experimentally observed period is of the order of two to three times the
estimated delay time. The model here for carbon dioxide in the blood is a simple one
and to make detailed quantitative comparison with the actual process that takes place
is not really justified. It does, however, clearly show how a delay model can arise in a
genuine physiological context and produce oscillatory behaviour such as is observed in
Cheyne–Stokes respiration.
The problem of periodic breathing that we have just discussed has also been studied
in some detail by Fowler and Kalamangalam (2000; see other references there). They
put forward a very different explanation for the disease. They suggest that the dynamics
of the system are determined by the interaction between the carbon dioxide in the differ-
ent compartments of the body and that, in fact, the production is more or less irrelevant.
They show that the respiratory system is subject to an oscillatory instability when, as
with patients with heart failure, the cardiac output is severely reduced. They further
show that the cycle time is approximately twice the brain arterial delay and show that
this is consistent with recent observational studies on patients with cardiac problems.
They go further and include variable cardiac response to blood gas levels, which in turn
introduces variable delays, and show that this has a stabilising effect. An important as-
pect of their work is the extensive discussion they give of the physiological implications
of parameter variation in their model.
There are many fascinating and challenging modelling problems associated with
breathing; see, for example, the book of articles edited by Benchetrit et al. (1987). Also,
periodic breathing is not restricted to pathologies of the heart and brain. See also the
book by Hoppensteadt and Peskin (1992) for other physiological examples.
Regulation of Haematopoiesis
The second example we consider briefly has certain similarities to the last and so we
do not go through the analysis in as much detail. It is concerned with the regulation of
haematopoiesis, the formation of blood cell elements in the body. For example, white
and red blood cells, platelets and so on are produced in the bone marrow from where
they enter the blood stream. When the level of oxygen in the blood decreases this leads
to a release of a substance which in turn causes an increase in the release of the blood
elements from the marrow. There is thus a feedback from the blood to the bone marrow.
Abnormalities in the feedback system are considered major suspects in causing periodic
haematological diseases in general and this one is no exception. Further details of the
process and the model we discuss are given in Mackey and Glass (1977) and Glass and
Mackey (1979).
Let c(t) be the concentration of cells (the population species) in the circulating
blood; the units of c are, say, cells/mm
3
. We assume that the cells are lost at a rate pro-
portional to their concentration, that is, like gc, where the parameter g has dimensions
(day)
−1
. After the reduction in cells in the blood stream there is about a 6-day delay
before the marrow releases further cells to replenish the deficiency. We thus assume
that the flux λ of cells into the blood stream depends on the cell concentration at an
earlier time, namely, c(t −T ),whereT is the delay. Such assumptions suggest a model
1.5 Delay Models in Physiology: Periodic Dynamic Diseases 27
equation of the form
dc(t)
dt
= λ(c(t − T )) − gc(t). (1.42)
Mackey and Glass (1977) proposed two possible forms for the function λ(c(t − T)).
The one we consider gives
dc
dt
=
λa
m
c(t − T )
a
m
+c
m
(t − T )
− gc, (1.43)
where λ, a, m, g and T are positive constants. This equation can be analysed in the same
way as (1.28) above (Exercise 5). The procedure is to nondimensionalise it, look for the
steady state, investigate the linear stability and determine the conditions for instability.
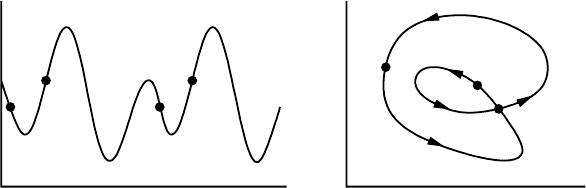
Figure 1.15. (a) Numerical solution of (1.43), the model for haematopoiesis (regulation of blood cells) with
parameter values g = 0.1day
−1
, λ = 0.2day
−1
, m = 10, and delay T = 6 days. The low amplitude
oscillation has a period of about 20 days. (b) The numerical simulation with parameter values as in (a) except
for an increase in the delay to T = 20 days. Note the aperiodic behaviour of the solution. (c) Circulating
blood count of a 12-year-old girl suffering from chronic leukaemia. The rough period of the oscillation is
about 72 days. (Redrawn from Mackey and Glass 1977).
28 1. Continuous Population Models for Single Species
Near the bifurcation values of the parameters which initiate an oscillatory growing so-
lution a perturbation analysis provides an estimate for the period of the ensuing limit
cycle behaviour. Figures 1.15(a) and (b) show the numerical simulation of (1.43) for
two values of the delay time T and parameters in the range for which the steady state is
unstable.
One manifestation of leukaemia is the periodic oscillations observed in, for exam-
ple, the white cell count. Figure 1.15(c) is an example from a 12-year-old patient with
chronic myelogenous leukaemia. Although the overall character is quasi-periodic, it is
in fact aperiodic. Note the comparison between Figures 1.15(b) and (c).
The qualitative change in the solution behaviour as the delay is increased is indica-
tive of what is now referred to as chaos. We discuss this concept in more detail in the
following chapter. Basically chaos is when the solution pattern is not repetitive in any
regular way. A working definition of chaos is aperiodic behaviour in a deterministic
system which depends intimately on the initial conditions: very small changes in the
initial conditions can give rise to major differences in the solution at later times. An
indication of periodic behaviour and of the onset of chaos can be obtained from the plot
of c(t −T ) against c(t) for various values of the parameters. Figure 1.16 shows a series
of bifurcating periodic solutions of (1.43) as the parameter m increases.
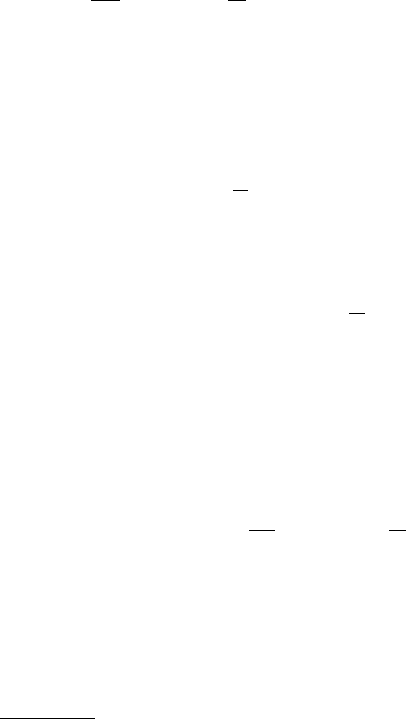
The behaviour in Figure 1.16(a), where the phase plane trajectory is a simple closed
curve, implies the solution is a simple periodic solution. For example, if we start at P
say, the solution trajectory moves round the curve and eventually returns to P after a
finite time. In other words if c(t) = c
1
at time t
1
, c(t) is again equal to c
1
when time t
increases by the period: Figure 1.15(a) is a typical solution c(t) as a function of time in
this situation. If we now look at Figure 1.16(b) it looks a bit like a double loop trajectory
of the kind in (a); you have to go round twice to return to where you started. A typical
solution here is like that shown in Figure 1.17(a).
The solutions c(t) implied by Figure 1.16 illustrate a common and important feature
of many model systems, namely, different periodic solution behaviour as a parameter
passes through specific bifurcation values; here it is the Hill coefficient m in (1.43).
Referring now to Figure 1.17(b), if you start at P the solution first decreases with
time and then increases as you move along the trajectory of the first, inner, loop. Now
when c(t) reaches Q, instead of going round the same loop past P again it moves onto
the outer loop through R. It eventually goes through P again after the second circuit. As
before the solution is still periodic of course, but its appearance is like a mixture of two
solutions of the type in Figure 1.15(a) but with different periods and amplitudes. As m
increases, the phase plane trajectories become progressively more complex suggesting
quite complex solution behaviour for c(t). For the case in Figure 1.16(e) the solution
undergoes very many loops before it possibly returns to its starting point. In fact it never
does! The solutions in such cases are not periodic although they have a quasi-periodic
appearance. This is an example of chaotic behaviour.
Figure 1.15(b) is a solution of (1.43) which exhibits this chaotic behaviour while
Figure 1.15(c) shows the dynamic behaviour of the white cell count in the circulating
blood of a leukaemia patient. Although Figures 1.15(b) and (c) exhibit similar aperiodic
behaviour, it is dangerous to presume that this model is therefore the one governing
white cell behaviour in leukaemia patients. However, what this modelling exercise has
demonstrated, among other things, is that delay can play a significant role in physiologi-

1.5 Delay Models in Physiology: Periodic Dynamic Diseases 29
Figure 1.16. Numerical solutions of bifurcating periodic solutions of the model for haematopoiesis given by
(1.43) with γ = a = 1, λ = 2, T = 2, and a range of m from m = 7tom = 20. Note the progression from
a simple periodic solution, as indicated by (a), to the complex chaotic behaviour indicated by (e). For larger
m, regular periodic solutions again emerge prior to another chaotic range as in (i).Seetextforadetailed
explanation. (Reproduced with permission from Mackey and Milton 1988)
cal pattern disruption. In turn this suggests that a deficiency in bone marrow cell produc-
tion could account for the erratic behaviour in the white cell count. So although such a
model can highlight important questions for a medical physiologist to ask, for it to be of
practical use it is essential that close interdisciplinary collaboration is maintained so that
realism is retained in making suggestions and drawing conclusions, however plausible
they may be.
30 1. Continuous Population Models for Single Species
(b)(a)
t
c(t)
c(t)
0
c(t − T )
R
R
P
PP
Q
QQ
Figure 1.17. (a) Qualitative solution for c(t) when the parameters in the differential delay equation (1.28)
have a phase plane trajectory as in (b), namely, the case in Figure 1.13(b).
The numerical simulations of this differential delay model (1.43), which is clearly
illustrative of a whole class, indicates a cascading sequence of bifurcating periodic solu-
tions which become chaotic. The sequence then passes through a coherent periodic stage
and again becomes chaotic and so on as a parameter in the model itself passes through
successive bifurcating values. As we said, this behaviour arises in a different context in
the following chapter on discrete models where it is discussed in some detail: periodic
doubling can be shown analytically. This phenomenon of cascading period doubling
leading to chaos with chaotic regimes separated by coherent period doubling is often a
fractal structure. We discuss such a fractal in the next chapter and fractals in other con-
texts later in Chapter 14. The existence of this kind of sequential bifurcating behaviour
in such model equations is of considerable potential importance in its biomedical im-
plications: see, for example, the book edited by Othmer et al. (1993), most chapters of
which deal with real medical and physiological examples of oscillatory phenomena.
1.6 Harvesting a Single Natural Population
It is clearly necessary to develop an ecologically acceptable strategy for harvesting any
renewable resource be it animals, fish, plants, or whatever. We also usually want the
maximum sustainable yield with the minimum effort. The inclusion of economic factors
in population models of renewable resources is increasing and these introduce impor-
tant constraints: see, for example, the seminal books by Clark (1976b, 1985, 1990). The
book by Kot (2001) has a chapter on harvest models and optimal control theory. The re-
view article by Plant and Mangel (1987) is concerned with insect pest management. The
model we describe here is a simple logistic one with the inclusion of a harvesting con-
tribution: it was discussed by Beddington and May (1977). Although it is a particularly
simple one it brings out several interesting and important points which more sophisti-
cated models must also take into account. Rotenberg (1987) also considered the logistic
model with harvesting, with a view to making the model more quantitative. He also
examined the effects of certain stochastic parameters on possible population extinction.
Most species have a growth rate, depending on the population, which more or less
maintains a constant population equal to the environment’s carrying capacity K .That
1.6 Harvesting a Single Natural Population 31
is, the growth and death rates are about equal. Harvesting the species affects the mor-
tality rate and, if it is not excessive, the population adjusts and settles down to a new
equilibrium state N
h
< K . The modelling problem is how to maximise the sustained
yield by determining the population growth dynamics so as to fix the harvesting rate
which keeps the population at its maximum growth rate.
We discuss here a basic model which consists of the logistic population model (1.2)
in which the mortality rate is enhanced, as a result of harvesting, by a term linearly
proportional to N ; namely,
dN
dt
= rN
1 −
N
K
− EN = f (N). (1.44)
Here r, K and E are positive constants and EN is the harvesting yield per unit time
with E a measure of the effort expended. K and r are the natural carrying capacity and
the linear per capita growth rate respectively. The new nonzero steady state from (1.44)
is
N
h
(E) = K
1 −
E
r
> 0ifE < r (1.45)
which gives a yield
Y (E) = EN
h
(E) = EK
1 −
E
r
. (1.46)
Clearly if the harvesting effort is sufficiently large so that it is greater than the linear
growth rate when the population is low, the species will die out. That is, if E > r the
only realistic steady state is N = 0. If E < r (which was possibly not the case, for
example, with whaling in the early 1970’s) the maximum sustained yield and the new
harvesting steady state are, from (1.46) and (1.45),
Y
M
= Y (E)|
E=r/2
=
rK
4
, N
h
|
Y
M
=
K
2
. (1.47)
Does an analysis of the dynamic behavior tell us anything different from the naive, and
often used, steady state analysis just given here?
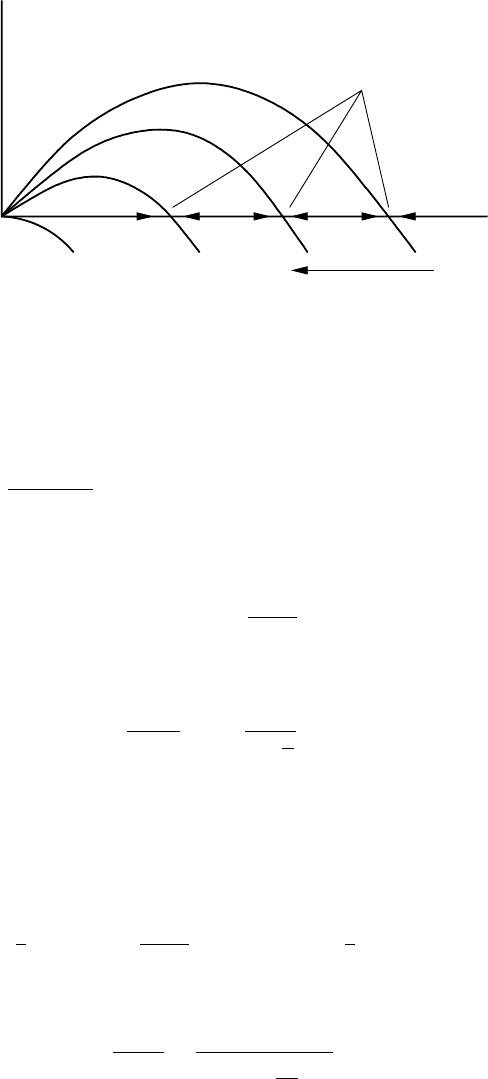
Figure 1.18 illustrates the growth rate f (N) in (1.44) as a function of N for various
efforts E. Linearising (1.44) about N
h
(E) gives
d
(
N − N
h
)
dt
≈ f
(
N
h
(E)
)(
N − N
h
)
= (E −r)
(
N − N
h
)
, (1.48)
which shows linear stability if E < r: arrows indicate stability or instability in Fig-
ure 1.18.
We can consider the dynamic aspects of the process by determining the time scale
of the recovery after harvesting. If E = 0 then, from (1.44), the recovery time T =
32 1. Continuous Population Models for Single Species
f (N)
0
E > r
E < r
increasing E
N
h
(E)
N
Figure 1.18. Growth function f (N) for the logistic model with harvesting according to (1.44). Note how the
positive steady state decreases with increasing E, eventually tending to zero as E → r.
O(1/r), namely, the timescale of the reproductive growth. This is the order of magni-
tude of the recovery time of N to its carrying capacity K after a small perturbation from
K since, for N(t) − K small and N
h
(0) = K, (1.48) shows
d(N − K)
dt
≈−r(N − K ) ⇒ N(t) − K ∝ e
−rt
.
If E = 0, with 0 < E < r, then the recovery time in a harvesting situation, from (1.48),
is
T
R
(E) = O
1
r − E
and so
T
R
(E)
T
R
(0)
= O
1
1 −
E
r
. (1.49)
Thus for a fixed r,alargerE increases the recovery time since T
R
(E)/T
R
(0) increases
with E.WhenE = r/2, the value giving the maximum sustained yield Y
M
, T
R
(E) =
O(2T
R
(0)).
The usual definition of a recovery time is the time to decrease a perturbation from
equilibrium by a factor e. Then, on a linear basis,
T
R
(0) =
1
r
, T
R
(E) =
1
r − E
⇒ T
R
E =
r
2
= 2T
R
(0). (1.50)
Since it is the yield Y that is recorded, if we solve (1.46) for E in terms of Y we have
T
R
(Y )
T
R
(0)
=
2
1 ±
1 −
Y
Y
M
1/2
(1.51)
1.6 Harvesting a Single Natural Population 33
(a) (b)
T
R
(Y )
T
R
(0)
2
1
1
00
L
+
L
−
A
Y/Y
M
K/2 N
h
(E)
KN
rN(1−N/K )
Y =EN
Y =EK(1−E/r)
=EN
h
(E)
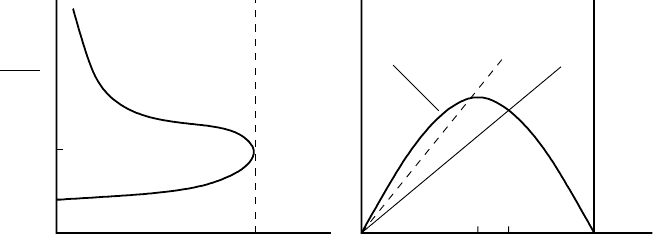
Figure 1.19. (a) Ratio of the recovery times as a function of the yield for the logistic growth model, with
yield proportional to the population: equation (1.44). (b) Graphical method for determining the steady state
yield Y for the harvested logistic model (1.44).
which is sketched in Figure 1.19(a) where L
+
and L
−
denote the positive and negative
roots of (1.51). It is clearly advantageous to stay on the L
+
branch and potentially
disastrous to get onto the L
−
one. Let us now see what determines the branch.
Suppose we start harvesting with a small effort E; then, as is clear from Fig-
ure 1.19(b), the equilibrium population N
h
(E) is close to K and N
h
(E)>K/2, the
equilibrium population for the maximum yield Y
M
. The recovery time ratio T
R
(E)/
T
R
(0) from (1.50) is then approximately 1. So increasing E, and hence the yield, we
are on branch L
+
.AsE increases further, N
h
(E) decreases towards K /2, the value
for the maximum sustained yield Y
M
and we reach the point A in Figure 1.19(a) when
N
h
(E) = K /2. As E is increased further, N
h
(E)<K/2 and the recovery time is
further increased but with a decreasing yield; we are now on the L
−
branch.
We can now see what an optimal harvesting strategy could be, at least from this
deterministic point of view. An effort E should be made which keeps the equilibrium
population density N
h
(E)>K/2, but as close as possible to K /2, the value for the
maximum sustained yield. The closer to K /2, however, the more delicate the situation
becomes since we might inadvertently move onto branch L
−
in Figure 1.19(a). At this
stage, when N
h
(E) is close to K/2, a stochastic analysis should be carried out; this
was done by Beddington and May (1977). Stochastic elements of course reduce the
predictability of the catch. In fact, with this model, they decrease the average yield for
a given effort.
Before leaving this model, we can see how it is difficult to use models such as these
for determining a maximum yield in practice. Often a maximum yield is only found in
practice when attempts have been made to obtain an even greater yield. If the model
here were valid such a scenario could be catastrophic, since if one moves onto the upper
branch the reduction in effort might not be sufficient to move onto the bottom curve. So
even without a stochastic analysis we can see how random variations could play havoc
with the concept of a maximum sustainable yield.
As an alternative harvesting resource strategy suppose we harvest with a constant
yield Y
0
as our goal, a model studied by Brauer and Sanchez (1975). The model equation

34 1. Continuous Population Models for Single Species
(a) (b)
rK/4
Y
0
0
0
N
1
N
2
N
N
rN(1 − N/K)
f (N)
Y
0
increasing
N
2
(Y
0
)
Figure 1.20. (a) Equilibrium states for the logistic growth harvested with a constant yield Y
0
: equation (1.52).
(b)Growthrate f (N ) in (1.52) as the yield Y
0
increases.
is then
dN
dt
= rN
1 −
N
K
−Y
0
= f (N;r, K, Y
0
). (1.52)
Figure 1.20(a) shows the graphical way of determining the steady states as Y
0
varies. It
is trivial to find the equilibria analytically of course, but often the behavioural traits
as a parameter varies are more obvious from a figure, such as here. If 0 < Y
0
<
rK/4 = Y
M
, the maximum sustainable yield here, there are two positive steady states
N
1
(Y
0
), N
2
(Y
0
)>N
1
(Y
0
) which from Figure 1.20(b) are respectively unstable and sta-
ble. As Y
0
→ rK/4, the maximum sustainable yield of the previous model is even more
sensitive to fluctuations since if a perturbation from N
2
takes N to a value N < N
1
the
mechanism then drives N to zero; see Figure 1.20(b). Not only that, N → 0inafinite
time since for small enough N, (1.52) becomes dN/dt ≈−Y
0
and so for any starting
N
0
at t
0
, N(t) ≈ N
0
−Y
0
(t −t
0
) and N(t) = 0whent = t
0
+ N
0
/Y
0
.
For easy comparison with the constant effort model we evaluate the equivalent
recovery time ratio T
R
(Y
0
)/T
R
(0). The recovery time T
R
(Y
0
) is only relevant to the
stable equilibrium N
2
(Y
0
) which from (1.52) is
N
2
(Y
0
) =
K
2
1 +
1 −
4Y
0
Kr
1/2
, Y
0
< rK/4.
The linearised form of (1.52) is then
d(N − N
2
(Y
0
))
dt
≈ (N − N
2
)
∂ f
∂ N
N
2
(Y
0
)
=−(N − N
2
) r
1 −
4Y
0
Kr
1/2
.

1.6 Harvesting a Single Natural Population 35
Thus
T
R
(Y
0
)
T
R
(0)
=
1
1 −
Y
0
Y
M
1/2
, Y
M
=
rK
4
(1.53)
which shows that T
R
(Y
0
)/T
R
(0) →∞as Y
0
→ Y
M
. This model is thus a much more
sensitive one and, as a harvesting strategy, is not really adequate.
One conclusion from this modelling exercise is that a constant effort rather than a
constant yield harvesting strategy is less potentially catastrophic. It also calls into ques-
tion, even with this simple model, the fishing laws, for example, which regulate catches.
A more realistic model, on the lines described here, should take into account the eco-
nomic costs of harvesting and other factors. This implies a feedback mechanism which
can be a stabilising factor; see Clark (1976b, 1985, 1990). With the unpredictability
of the real world it is probably essential to include feedback. Nevertheless such sim-
ple models can pose highly relevant ecological and long term financial questions which
have to be considered in any more realistic and more sophisticated model.
The problems of sustainable harvesting of renewable resources are crucially im-
portant, whether it is in fisheries, forestry management or any other renewable resource
which depends on the maintenance of a reproductive surplus in a population. In the
above very simple example we saw how it is possible to move onto a catastrophic path
if we do not have sufficient information such as knowing, a priori, what the maximum
sustainable yield can be. The basic concept of a sustainable resource depends on a re-
productive surplus being maintained under a variety of circumstances many of which
are difficult to quantify. With the difficulty of obtaining accurate data it makes it even
more difficult to produce a workable model system on which to base decisions. Ludwig
and his colleagues (Ludwig 1993, 1994, 1995, 1996a, 1996b, Ludwig et al. 1993, 1997
and other references given in these) persuasively argue the case for a more sophisticated
and realistic modelling in which stochastic elements play a crucial role. Numerous real
case studies are discussed which highlight potentially serious problems with overly sim-
ple models. They demonstrate the importance of assessing the possibility of population
extinction because of, among other things, uncertainty about crucial parameters, small
stochastic elements and the effect of rare catastrophes. For anyone seriously considering
working in the ecological field of harvesting of renewable resources these papers should
be required reading. The book by Getz and Haight (1989) gives a good survey of the
field of population harvesting and resource management in diverse areas. It discusses
numerous mathematical models and applications to specific case studies for which field
data are available. The book edited by Levin (1994, Parts V and VI)) contains arti-
cles which are also particularly relevant. The book by Hilborn and Mangel (1997) is
also relevant: it confronts models with data and discusses numerous practical case stud-
ies which require a probabilistic approach. They provide the necessary statistics and
probability background necessary for the study of the various models. The 1990’s have
witnessed several population collapses of what were hitherto thought of as sustainable
resources, such as cod in the north Atlantic and what looks like being another with
salmon in the north east Pacific coast to mention but two. Sadly even when the scien-
tific knowledge is available as to a future catastrophe, politics and short term economics
prevent its implementation.