Murray J.D. Mathematical Biology: I. An Introduction
Подождите немного. Документ загружается.

16 1. Continuous Population Models for Single Species
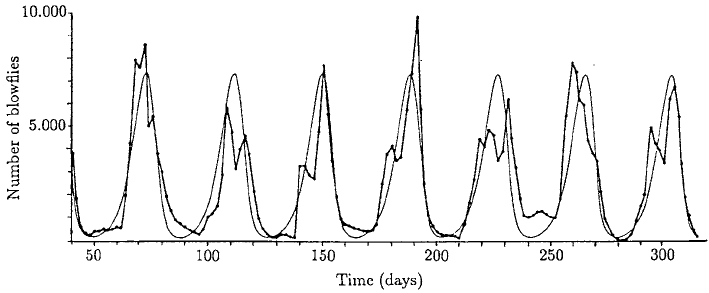
observed the population of flies which were maintained under carefully regulated tem-
perature and food control. He observed a regular basic periodic oscillation of about 35
to 40 days. Applying (1.12) to the experimental arrangement, K is set by the food level
available. T , the delay, is approximately the time for a larva to mature into an adult.
Then the only unknown parameter is r, the intrinsic rate of population increase. Fig-
ure 1.12 illustrates the comparison with the data for rT = 2.1 for which the period
is about 4.54T . If we take the observed period as 40 days this gives a delay of about
9 days; the actual delay is closer to 11 days. The model implies that if K is doubled
nothing changes from a time periodic point of view since it can be scaled out by writing
N/K for N; this lack of change with K is what was observed.
It is encouraging that such a simple model as (1.12) should give such reasonable
results. This is some justification for using delay models to study the dynamics of sin-
gle populations which exhibit periodic behaviour. It is important, however, not to be too
easily convinced as to the validity or reasonableness of a model simply because some
solutions agree even quantitatively well with the data; this is a phenomenon, or rather a
pitfall, we encounter repeatedly later in the book particularly when we discuss models
for generating biological pattern and form in Chapter 2 to Chapter 6, Volume II. From
the experimental data reproduced in Figure 1.12 we see a persistent ‘second burst’ fea-
ture that the solutions of (1.12) do not mimic. Also the difference between the calculated
delay of 9 days and the actual 11 days is really too large. Gurney et al. (1980) inves-
tigated this problem with a more elaborate delay model which agrees even better with
the data, including the two bursts of reproductive activity observed; see also the book
by Nisbet and Gurney (1982) where this problem is discussed fully as a case study.
Another example of the application of this model (1.12) to extant data is given
by May (1981) who considers the lemming population in the Churchill area of Canada.
There is approximately a 4-year period where, in this case the gestation time is T = 0.72
year. The vole population in the Scottish Highlands, investigated by Stirzaker (1975)
using a delay equation model, also undergoes a cycle of just under 4 years, which is
again approximately 4T where here the gestation time is T = 0.75 year. In this model
the effect of predation is incorporated into the single equation for the vole population.
Figure 1.12. Comparison of Nicholson’s (1957) experimental data for the population of the Australian sheep-
blowfly and the model solution from (1.12) with rT = 2.1. (From May 1975).

1.4 Delay Population Models: Periodic Solutions 17
The article by Myers and Krebs (1974) discusses population cycles in rodents in general:
they usually have 3 to 4 year cycles.
Not all periodic population behaviour can be treated quite so easily. One such ex-
ample which is particularly dramatic is the 13- and 17-year cycle exhibited by a species
of locusts; that is, their emergences are synchronized to 13 or 17 years.
It should perhaps be mentioned here that single (nondelay) differential equation
models for population growth without delay, that is, like dN/dt = f (N), cannot exhibit
limit cycle behaviour. We can see this immediately as follows. Suppose this equation
has a periodic solution with period T ;thatis,N(t + T ) = N(t). Multiply the equation
by dN/dt and integrate from t to t + T to get
t+T
t
dN
dt
2
dt =
t+T
t
f (N)
dN
dt
dt
=
N(t+T )
N(t)
f (N) dN
= 0
since N(t + T ) = N(t). But the left-hand integral is positive since (dN/dt)
2
cannot
be identically zero, so we have a contradiction. So, the single scalar equation dN/dt =
f (N) cannot have periodic solutions.
1.4 Linear Analysis of Delay Population Models: Periodic Solutions
We saw in the last section how the delay differential equation model (1.12) was capable
of generating limit cycle periodic solutions. One indication of their existence is if the
steady state is unstable by growing oscillations, although this is certainly not conclusive.
We consider here the linearisation of (1.12) about the equilibrium states N = 0and
N = K . Small perturbations from N = 0 satisfy dN/dt ≈ rN, which shows that
N = 0 is unstable with exponential growth. We thus need only consider perturbations
about the steady state N = K .
It is again expedient to nondimensionalise the model equation (1.12) by writing
N
∗
(t) =
N(t)
K
, t
∗
= rt, T
∗
= rT, (1.14)
where the asterisk denotes dimensionless quantities. Then (1.12) becomes, on dropping
the asterisks for notational simplicity, but keeping in mind that we are now dealing with
nondimensional quantities,
dN(t)
dt
= N(t)
[
1 − N(t − T )
]
. (1.15)
Linearising about the steady state, N = 1, by writing

18 1. Continuous Population Models for Single Species
N(t) = 1 +n(t) ⇒
dn(t)
dt
≈−n(t − T ). (1.16)
We look for solutions for n(t) in the form
n(t) = ce
λt
⇒ λ =−e
−λT
, (1.17)
from (1.16), where c is a constant and the eigenvalues λ are solutions of the second of
(1.17), a transcendental equation in which T > 0.
It is not easy to find the analytical solutions of (1.17). However, all we really want
to know from a stability point of view is whether there are any solutions with Re λ>0
which from the first of (1.17) implies instability since in this case n(t) grows exponen-
tially with time.
Set λ = µ + iω. There is a real number µ
0
such that all solutions λ of the second
of (1.17) satisfy Re λ<µ
0
. To see this take the modulus to get |λ |=e
−µT
and so, if
|λ |→∞then e
−µT
→∞which requires µ →−∞. Thus there must be a number
µ
0
that bounds Re λ from above. If we introduce z = 1/λ and w(z) = 1 +ze
−T/z
then
w(z) has an essential singularity at z = 0. So by Picard’s theorem, in the neighbourhood
of z = 0,w(z) = 0 has infinitely many complex roots. Thus there are infinitely many
roots λ.
We now take the real and imaginary parts of the transcendental equation in (1.17),
namely,
µ =−e
−µT
cos ωT,ω= e
−µT
sin ωT, (1.18)
and determine the range of T such that µ<0. That is, we want to find the conditions
such that the upper limit µ
0
on µ is negative. Let us first dispense with the simple case
where λ isreal;thatis,ω = 0. From (1.18), ω = 0 satisfies the second equation and the
first becomes µ =−e
−µT
. This has no positive roots µ>0sincee
−µT
> 0forallµT
or as can be seen on sketching each side of the equation as a function of µ and noting
that they can only intersect with T > 0ifµ<0.
Consider now ω = 0. From (1.18) if ω is a solution then so is −ω, so we can
consider ω>0 without any loss of generality. From the first of (1.18), µ<0 requires
ωT <π/2since−e
−µT
< 0forallµT . In principle (1.18) defines µ(T ), ω(T ).
We are interested in the value of T when µ(T ) first crosses from µ<0toµ>0.
As T increases from zero µ = 0firstwhenωT = π/2. From (1.18) we see that if
µ = 0 the second equation gives as the only relevant solution ω = 1 occurring at
T = π/2. Since this is the first zero of µ as T increases, this gives the bifurcating value
T = T
c
= π/2. Another way of deriving this is to show, from (1.18), that the gradient
of µ(T )at µ = 0, namely, (∂µ/∂T )
T =π/2
> 0. Anticipating the result of the following
analysis that ω<1forT >π/2, note in passing that (∂ω/∂T )
T =π/2
< 0. So we have
0 < T <
π
2
(1.19)
as the condition on T for stability.
1.4 Delay Population Models: Periodic Solutions 19
Returning now to dimensional quantities we thus have that the steady state N(t) =
K is stable if 0 < rT <π/2 and unstable for rT >π/2. In the latter case we expect
the solution to exhibit stable limit cycle behaviour. The critical value rT = π/2isthe
bifurcation value, that is, the value of the parameter, rT here, where the character of the
solutions of (1.12) changes abruptly, or bifurcates, from a stable steady state to a time-
varying solution. The effect of delay in models is usually to increase the potential for
instability. Here as T is increased beyond the bifurcation value T
c
= π/2r, the steady
state becomes unstable.
Near the bifurcation value we can get a first estimate of the period of the bifurcating
oscillatory solution as follows. Consider the dimensionless form (1.15) and let
T = T
c
+ε =
π
2
+ε, 0 <ε 1. (1.20)
The solution λ = µ + iω, of (1.18), with the largest Re λ when T = π/2isµ = 0,
ω = 1. For ε small we expect µ and ω to differ from µ = 0andω = 1alsobysmall
quantities so let
µ = δ, ω = 1 +σ, 0 <δ 1, |σ |1, (1.21)
where δ and σ are to be determined. Substituting these into the second of (1.18) and
expanding for small δ, σ and ε gives
1 +σ = exp
−δ
π
2
+ε
sin
(
1 +σ
)
π
2
+ε
⇒ σ ≈−
πδ
2
to first order, while the first of (1.18) gives
δ =−exp
−δ
π
2
+ε
cos
(
1 +σ
)
π
2
+ε
⇒ δ ≈ ε +
πσ
2
.
Thus on solving these simultaneously
δ ≈
ε
1 +
π
2
4
,σ≈−
επ
2
1 +
π
2
4
, (1.22)
and hence, near the bifurcation, the first of (1.17) with (1.16) gives
N(t) = 1 +Re {c exp [δt +i(1 +σ)t]}
≈ 1 +Re
c exp
εt
1 +
π
2
4
exp
it
1 −
επ
2(1 +
π
2
4
.
(1.23)
This shows that the instability is by growing oscillations with period
2π
1 −
επ
2(1+
π
2
4
)
≈ 2π

20 1. Continuous Population Models for Single Species
to O(1) for small ε.Indimensional termsthisis2π/r and, since to O(1), rT = π/2,
the period of oscillation is then 4T as we expected from the intuitive arguments above.
From the numerical results for limit cycles quoted above the solution with rT = 1.6
had period 4.03T . With rT = π/2 + ε = 1.6, this gives ε ≈ 0.029 so the dimensional
period to O(ε) is obtained from the last equation as
2T
π
2π
1 −
επ
2
1+
π
2
4
≈ 4.05T,
which compares well with the numerical computed value of 4.03T .WhenrT = 2.1
this gives ε ≈ 0.53 and corresponding period 5.26T which is to be compared with the
computed period of 4.54T .Thisε is too large for the above first order analysis to hold
(ε
2
is not negligible compared with ε); a more accurate result would be obtained if the
analysis were carried out to second order.
The natural appearance of a ‘slow time’ εt in N(t) in (1.23) suggests that a full
nonlinear solution near the bifurcation value rT = π/2 is amenable to a two-time
asymptotic procedure to obtain the (uniformly valid in time) solution. This can in fact be
done; see, for example, Murray’s (1984) book on asymptotic methods for a pedagogical
description of such techniques and how to use them.
The subject of delay or functional differential equations is now rather large. An
introductory mathematical book on the subject is Driver’s (1977). The book by Mac-
Donald (1979) is solely concerned with time lags in biological models. Although the
qualitative properties of such delay equation models for population growth dynamics
and nonlinear analytical solutions near bifurcation can often be determined, in general
numerical methods have to be used to get useful quantitative results.
A very useful technique for determining the necessary conditions for stability of
the solutions of linear delay equations is given by van den Driessche and Zou (1998)
and which we now give: it is a Liapunov function technique (for example, Jordan and
Smith 1999) which gives an estimate for the stability parameter space. Equation (1.16)
above is a special case of the general equation
dy
dt
= ay(t) + by(t −τ), t > 0, (1.24)
where τ is the delay and a and b are constant parameters. We could, of course, carry out
an equivalent analysis as we did on (1.16) and get the necessary and sufficient conditions
for stability and thereby determine the parameter space where the steady state is stable.
If y
s
is a steady state L[y(t)] is a Liapunov function if L[y(t)] > 0forally(t) = y
s
,
L[y(t)]=0fory(t) = y
s
(that is, L positive definite) and dL[y(t)]/dt < 0forall
y(t) = y
s
. If such a function can be found then y
s
is globally asymptotically stable
and no closed solution orbits are possible. Such a Liapunov function can be found for
(1.24); it is given by
L[y(t)]=y
2
(t) +|b |
t
t−τ
y
2
(s) ds, (1.25)
where y(t) is a solution of (1.24).

1.5 Delay Models in Physiology: Periodic Dynamic Diseases 21
We have to show that it is indeed a Liapunov function. Certainly L > 0forall
y = 0andL = 0wheny(t) = y
s
= 0. Furthermore
dL
dt
= 2y(t)
dy
dt
+|b |[y
2
(t) − y
2
(t − τ)]
= 2ay
2
(t) +2|b |y(t)y(t − τ) +|b |[y
2
(t) − y
2
(t −τ)]
≤ 2ay
2
(t) +|b |[y
2
(t) + y
2
(t − τ)]+|b |[y
2
(t) − y
2
(t −τ)]
= 2(a +|b |)y
2
(t)
≤ 0, for a < −|b |.
(1.26)
So, L[y(t)] satisfies all the conditions of a Liapunov function and so the steady state
y
s
= 0 is globally stable for all a < −|b | which gives the parameter space where
y = 0 is stable—and not just linearly stable. If a full stability analysis is carried out as
we did for (1.16) the stability domain is actually larger but not markedly so; they are
both, however, of the same broad general shape.
1.5 Delay Models in Physiology: Periodic Dynamic Diseases
There are many acute physiological diseases where the initial symptoms are manifested
by an alteration or irregularity in a control system which is normally periodic, or by
the onset of an oscillation in a hitherto nonoscillatory process. Such physiological peri-
odic diseases have been termed dynamical diseases by Glass and Mackey (1979) who
have made a particular study of several important physiological examples. The sym-
posium proceedings of a meeting specifically devoted to temporal disorders in human
oscillatory systems edited by Rensing et al. (1987) is particularly apposite to the ma-
terial and modelling in this section, as is the nontechnical intuitive book by Glass and
Mackey (1988) (which has many applications) and that edited by Othmer et al. (1993).
Other examples are discussed by Mackey and Milton (1990) and Milton and Mackey
(1989). Here we discuss two specific examples which have been modelled, analysed and
related to experimental observations by Mackey and Glass (1977). The review article
on dynamic diseases by Mackey and Milton (1988) is of direct relevance to the mate-
rial discussed here; it also describes some examples drawn from neurophysiology. The
book by Keener and Sneyd (1998) has other examples. Although the second model we
consider is concerned with populations of cells, the first does not relate to any popula-
tion species but rather to the concentration of a gas. It does, however, fit naturally here
since it is a scalar delay differential equation model the analysis for which is directly
applicable to the second problem. It is also interesting in its own right.
Cheyne–Stokes Respiration
The first example, Cheyne–Stokes respiration, is a human respiratory ailment mani-
fested by an alteration in the regular breathing pattern. Here the amplitude of the breath-
ing pattern, directly related to the breath volume—the ventilation V —regularly waxes
and wanes with each period separated by periods of apnea, that is where the volume per
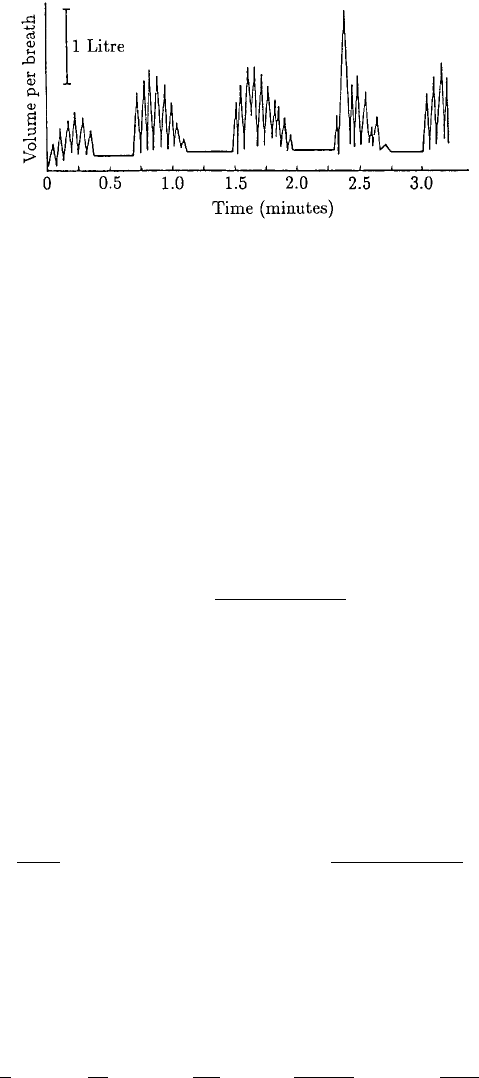
22 1. Continuous Population Models for Single Species
Figure 1.13. A spirogram of the breathing pattern of a 29-year-old man with Cheyne–Stokes respiration. The
typical waxing and waning of the volume of breath is interspersed with periods of low ventilation levels; this
is apneic breathing. (Redrawn with permission from Mackey and Glass 1977)
breath is exceedingly low. Figure 1.13 is typical of spirograms of those suffering from
Cheyne–Stokes respiration.
We first need a few physiological facts for our model. The level of arterial carbon
dioxide (CO
2
), c(t) say, is monitored by receptors which in turn determine the level of
ventilation. It is believed that these CO
2
-sensitive receptors are situated in the brainstem
so there is an inherent time lag, T say, in the overall control system for breathing levels.
It is known that the ventilation response curve to CO
2
is sigmoidal in form. We assume
the dependence of the ventilation V on c to be adequately described by what is called a
Hill function, of the form
V = V
max
c
m
(t − T )
a
m
+c
m
(t − T )
, (1.27)
where V
max
is the maximum ventilation possible and the parameter a and the Hill co-
efficient m are positive constants which are determined from experimental data. (We
discuss the biological relevance of Hill functions and how they arise later in Chapter 6.)
We assume the removal of CO
2
from the blood is proportional to the product of the
ventilation and the level of CO
2
in the blood.
Let p be the constant production rate of CO
2
in the body. The dynamics of the CO
2
level is then modelled by
dc(t)
dt
= p −bVc(t) = p −bV
max
c(t)
c
m
(t − T )
a
m
+c
m
(t − T )
, (1.28)
where b is a positive parameter which is also determined from experimental data. The
delay time T is the time between the oxygenation of the blood in the lungs and moni-
toring by the chemoreceptors in the brainstem. This first order differential-delay model
exhibits, as we shall see, the qualitative features of both normal and abnormal breathing.
As a first step in analysing (1.28) we introduce the nondimensional quantities
x =
c
a
, t
∗
=
pt
a
, T
∗
=
pT
a
,α=
abV
max
p
, V
∗
=
V
V
max
(1.29)

1.5 Delay Models in Physiology: Periodic Dynamic Diseases 23
and the model equation becomes
x
(t) = 1 −αx(t)
x
m
(t − T )
1 + x
m
(t − T )
= 1 −αxV
(
x(t − T )
)
, (1.30)
where for notational simplicity we have omitted the asterisks on t and T .
As before we get an indication of the dynamic behaviour of solutions by investigat-
ing the linear stability of the steady state x
0
given from (1.30) by
1 = α
x
m+1
0
1 + x
m
0
= αx
0
V
(
x
0
)
= αx
0
V
0
, (1.31)
where V
0
, defined by the last equation, is the dimensionless steady state ventilation.
A simple plot of 1/αx
0
and V (x
0
) as functions of x
0
shows there is a unique positive
steady state. If we now consider small perturbations about the steady state x
0
we write
u = x − x
0
and consider |u | small. Substituting into (1.30) and retaining only linear
terms we get, using (1.31),
u
=−αV
0
u − αx
0
V
0
u(t − T ), (1.32)
where V
0
= dV(x
0
)/dx
0
is positive. As in the last section we look for solutions in the
form
u(t) ∝ e
λt
⇒ λ =−αV
0
−αx
0
V
0
e
−λT
. (1.33)
If the solution λ with the largest real part is negative, then the steady state is stable.
Since here we are concerned with the oscillatory nature of the disease we are interested
in parameter ranges where the steady state is unstable and, in particular, unstable by
growing oscillations in anticipation of limit cycle behaviour. So, as before, we must
determine the bifurcation values of the parameters such that Re λ = 0.
Set λ = µ + iω. In the same way as in the last section it is easy to show that a
real number µ
0
exists such that for all solutions λ of (1.33), Re λ<µ
0
and also that
no real positive solution exists. For notational simplicity let us write the transcendental
equation (1.33) as
λ =−A − Be
−λT
, A = αV
0
> 0, B = αx
0
V
0
> 0. (1.34)
Equating real and imaginary parts gives
µ =−A − Be
−µT
cos ωT,ω= Be
−µT
sin ωT. (1.35)
Simultaneous solutions of these give µ and ω in terms of A, B and T : we cannot de-
termine them explicitly of course as we saw in Section 1.4. The bifurcation we are
interested in is when µ = 0 so we consider the parameter ranges which admit such a
solution. With µ = 0 the last equations give, with s = ωT ,

24 1. Continuous Population Models for Single Species
cot s =−
AT
s
, ⇒
π
2
< s
1
<π (1.36)
for all finite AT > 0wheres
1
is a solution. We can see that such a solution s
1
exists
on sketching cot s and −AT/s as functions of s. There are of course other solutions
s
m
of this equation in the ranges [(2m + 1)π/2,(m + 1)π] for m = 1, 2,... but we
need only consider the smallest positive solution s
1
since that gives the bifurcation for
the smallest critical T > 0. We now have to determine the parameter ranges so that
with µ = 0ands
1
substituted back into (1.35) a solution exists. That is, what are the
restrictions on A, B and T so that
0 =−A − B cos s
1
, s
1
= BT sin s
1
are consistent? These imply
BT =
(
AT
)
2
+s
2
1
1/2
. (1.37)
If B, A and T , which determine s
1
, are such that the last equality cannot hold then no
solution with µ = 0 exists.
Since A and B are positive, the solution is stable in the limiting case T = 0since
then Re λ = µ =−A − B < 0. Now consider (1.35) and increase T from T = 0. From
the last equation and (1.36) a solution with µ = 0 cannot exist if
BT <
(
AT
)
2
+s
2
1
1/2
s
1
cot s
1
=−AT,
π
2
< s
1
<π
(1.38)
and, from continuity arguments from T = 0wemusthaveµ<0. So the bifurcation
condition which just gives µ = 0 is (1.37). Or, put in another way, if (1.38) holds, the
steady state solution of (1.30) is linearly, and in fact globally, stable. In terms of the
original dimensionless variables from (1.34) the conditions are thus
αx
0
V
0
T <
(
αV
0
T
)
2
+s
2
1
1/2
,
s
1
cot s
1
=−αV
0
T.
(1.39)
If we now have A and B fixed, a bifurcation value T
c
is given by the first of (1.38) with
an equality sign in the inequality.
Actual parameter values for normal humans have been obtained by Mackey and
Glass (1977). The concentration of gas in blood is measured in terms of the partial
pressure it sustains and so it is measured in mmHg (that is, in torr). Relevant to the
dimensional system (1.28), they estimated
c
0
= 40 mmHg p = 6 mmHg/min, V
0
= 7 litre/min,
V
0
= 4 litre/min mmHg, T = 0.25 min.
(1.40)
1.5 Delay Models in Physiology: Periodic Dynamic Diseases 25
From (1.31), which defines the dimensionless steady state, we have αV
0
= 1/x
0
.So,
with (1.39) in mind, we have, using (1.40) and the nondimensionalisation (1.29),
αV
0
T =
T
x
0
=
pT
dimensional
c
0
= 0.0375.
The solution of the second of (1.39) with such a small right-hand side is s
1
≈ π/2and
so s
1
αV
0
T which means that the inequality for stability from the first of (1.39) is
approximately, but quite accurately,
V
0
<
π
2αx
0
T
. (1.41)
So, if the gradient of the ventilation at the steady state becomes too large the steady
state becomes unstable and limit cycle periodic behaviour ensues. With the values in
(1.40) the critical dimensional V
0
= 7.44 litre/min mmHg. The gradient increases with
the Hill coefficient m in (1.27). Other parameters can of course also initiate periodic
behaviour; all we require is that (1.41) is violated.
In dimensional terms we can determine values for m and a in the expression (1.27)
for the ventilation, which result in instability by using (1.41) with (1.29) and V
0
from
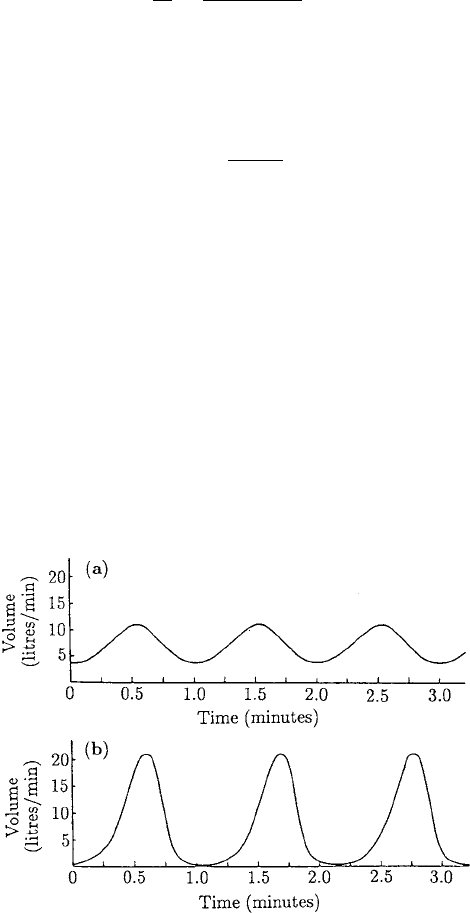
(1.31). Figures 1.14(a) and (b) show the dimensional results of numerical simulations
of (1.28) with two values for V
0
.
Note that the period of oscillation in both solutions in Figure 1.14 is about 1 minute,
which is 4T where T = 0.25 min is the estimate for delay given in (1.40). This is as we
would now expect from the analysis in the last section. A perturbation analysis in the
vicinity of the bifurcation state in a similar way to that given in the last section shows
Figure 1.14. (a) The solution behaviour of the model equation (1.30) presented in dimensional terms for
V
0
= 7.7 litre/min mmHg. (b) The solution behaviour for V
0
= 10.01 litre/min mmHg. Note the pronounced
apneic regions, that is where the ventilation is very low: this should be compared with the spirogram in
Figure 1.10. (Redrawn from Glass and Mackey 1979).