Markowich P. Applied Partial Differential Equation: A Visual Approach
Подождите немного. Документ загружается.


8 Optimal Transportation and Monge–Ampère Equations
136
Fig. 8.4. Branching of Vessels in Lotus Leafs
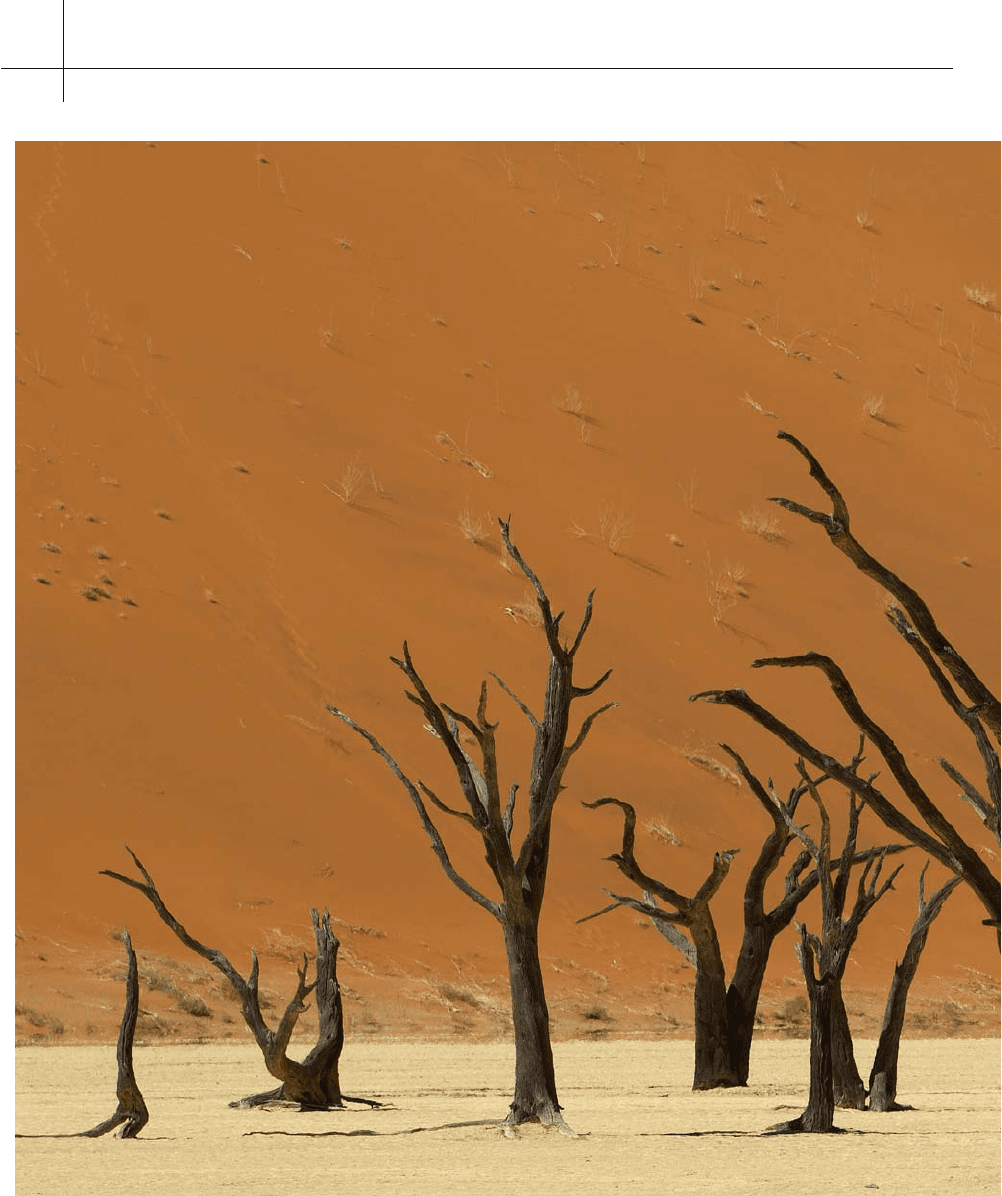
Fig. 8.5. Branches of a tree, Kalahari Desert

8 Optimal Transportation and Monge–Ampère Equations
137
and do not enter in the minimisation process. In many applications, however,
the construction of the transportation roads is really part of the transportation
problem itself. For example, Buttazzo and Stepanov in [5] analyse the problem
of constructing an optimal public transportation network in a city, based on
Monge–Kantorovich mass (measure) transportation theory. They let f represent
the density of housing locations, g the density of work places and define a cost
function, which expresses the fact that an inhabitant of a city either can walk
from the point x to the point y, or, if altogether shorter, walk from x to the nearest
point in the transportation network (represented by a closed connected subset U
of the city), use the network until the closest point to y and then walk from there
to y. Then they define a Kantorovich functional in analogy to (8.6), and minimise
again over all transportation network sets U with a one-dimensional Hausdorff
measure less than or equal to a prescribed maximal network length.
Comments on the Images 8.1–8.11 The Images 8.1–8.11 show classical and
modern applications of the Monge–Kantorovich mass transportation theory.
In the Images 8.1 and 8.2 we can see piles of construction material (‘deblais’)
to be moved, most likely to a fill (‘remblais’) on the same or on a different
construction site. This is the application which G. Monge had in mind in the
1780’s, when he gave the now classical (original) Monge-formulation [7] of the
Monge–Kantorovich mass transportation problem. Clearly, the means of realiz-
ing the transportation map differ in Images 8.1 and 8.2 and the importance for
minimizing the transportation cost is quite evident, particularly in Image 8.2 …
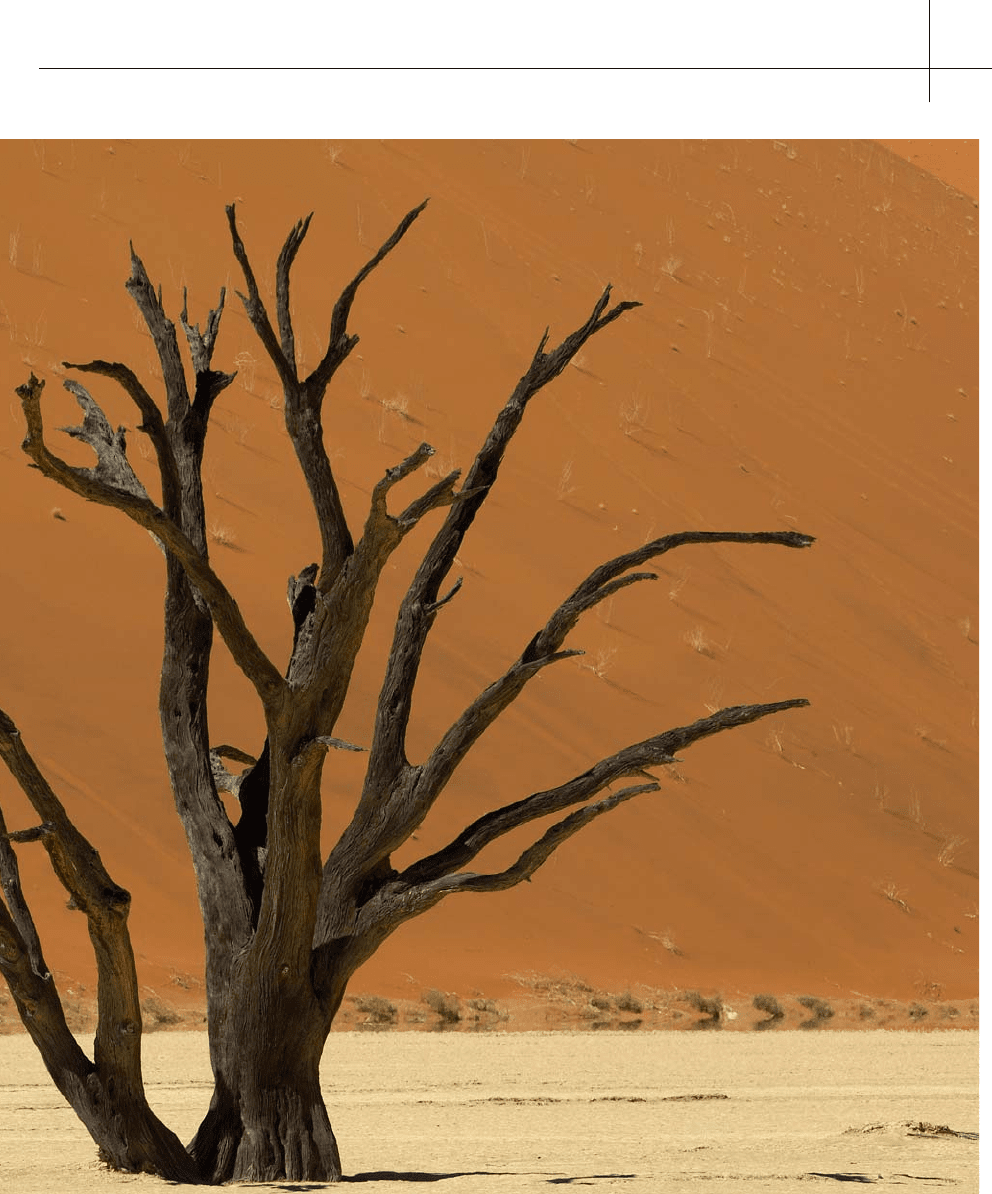
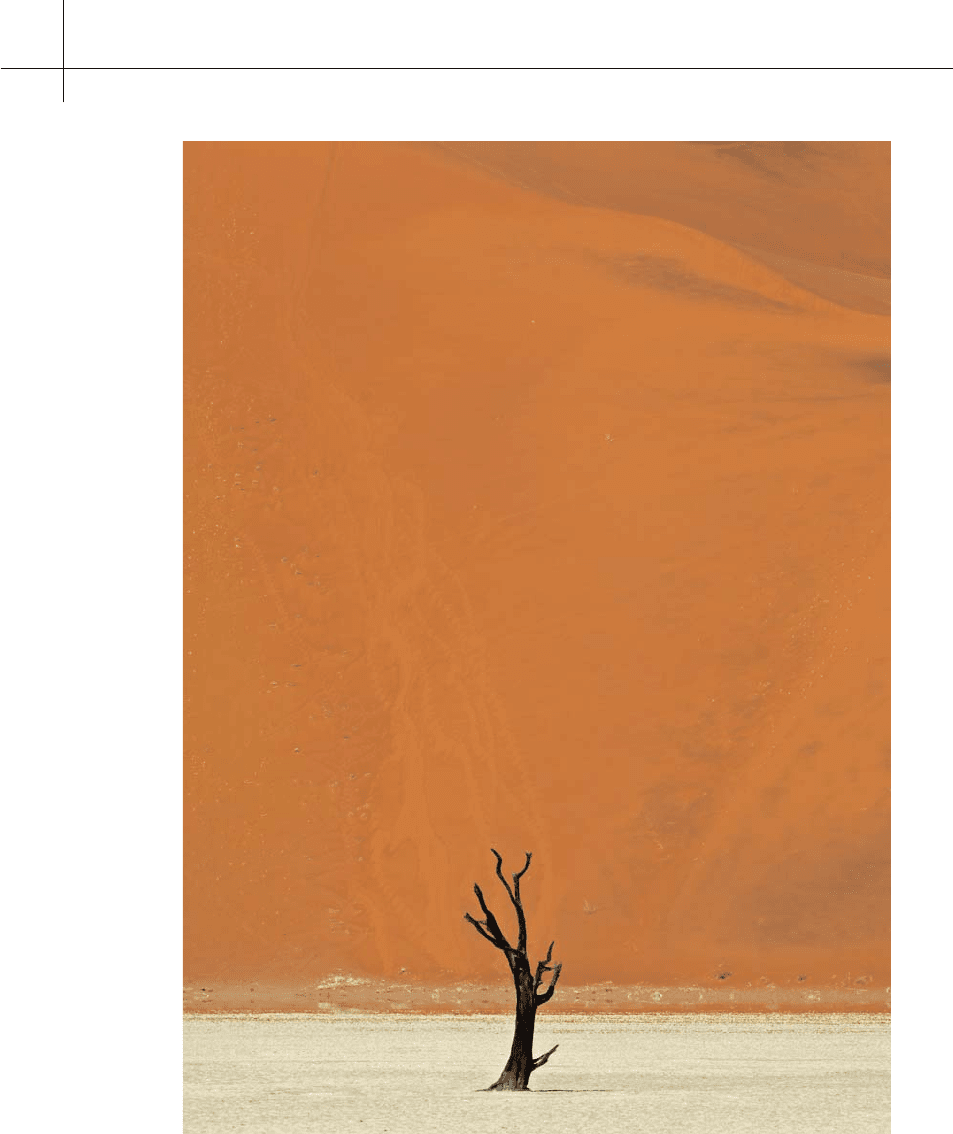
The Images 8.3 to 8.7 feature examples of branching and irrigation flow
networks, in particular river branching in Image 8.3, leaf vessel branching in
Image 8.4 and branches of trees in the Images 8.5–8.7. These examples and
many others can be regarded as supply-demand systems, where goods (nu-
trient fluids or river water) are transported from the supply location (e.g. the
base of the leaf or an upstream location in the riverbed) to the demand lo-
cation (e.g. the leaf’s perimeter or a downstream location in the riverbed).
It is clear that the original versions of the Monge–Kantorovich optimal mass
transportation cannot be applied directly, particularly since their solutions are
transference plans of minimal cost, which do not take possible infrastructures
and ‘infrastructure costs’ into account, i.e. there is no biasing of transportation
trajectories in the Monge–Kantorovich problem. The trajectories are simply
geodesics (straight lines in the Euclidean setting). Various generalisations, tak-
ing into account network costs by differentiating the transportation costs on
low and high capacity edges, were suggested by E.N. Gilbert [10], Q. Xia [15]
and M. Bernot, V. Caselles and J.-M. Morel [2] (among others). For a review
of the existing literature and a wealth of new results on irrigation plans (not
taking into account ‘who goes where’, only prescribing the supply and demand
measures) and traffic plans (taking into account ‘who goes where’, prescribing
a transportation plan) we refer to [2]. Most generally, traffic plans are defined
as probability measures on spaces of transport paths (connected and piece-
8 Optimal Transportation and Monge–Ampère Equations
138
Fig. 8.6. Branches of trees, Dead Vlei, Namibian Desert
8 Optimal Transportation and Monge–Ampère Equations
139
8 Optimal Transportation and Monge–Ampère Equations
140
Fig. 8.7. Branches of a tree, Dead Vlei, Namibian Desert
8 Optimal Transportation and Monge–Ampère Equations
141
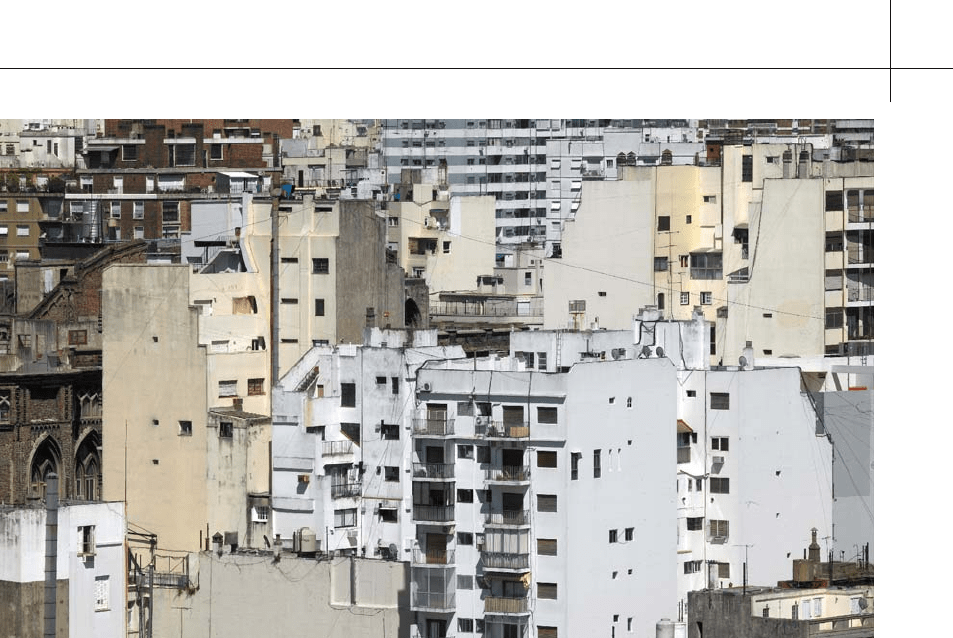
Fig. 8.8. Urban planning in Buenos Aires, for the living …
wise smooth curve segments). Associated transportation plans are measures
representing the mass transported THROUGH a given traffic plan, connecting
the irrigating (source) measure with the irrigated (demand) measure. The cost
functional of traffic plan is set up according to infrastructural expenses and
constraints. In analogy to the Kantorovich cost functional a minimisation over
irrigation plans connecting a given supply to a given demand measure or, resp.,
over traffic plans with a given transportation plan is carried out, leading to the
simultaneous construction of the transport paths and the transportation plan.
Note that a major difference to the Kantorovich problem lies in the fact that the
cost function generally depends on the whole transportation path and not only
on its endpoints!
The Images 8.8–8.11 depict urban areas in Buenos Aires, Quito and Rio de
Janeiro. Recently, urban planning models based on Monge–Kantorovich mass
transportation have been introduced in the literature. We cite [4], where a very
interesting model of optimal distribution of residential areas (density f )and
service areas (density g)inanurbanenvironmentispresented,whichweshall
discuss in some detail thereafter. The model is based on the propositions that
there is a transportation cost for moving between residential and service areas,
that overcrowding of residential areas is typically avoided by city dwellers and
that concentration of services is desirable for increasing efficiency. Obviously,
8 Optimal Transportation and Monge–Ampère Equations
142
8 Optimal Transportation and Monge–Ampère Equations
143
Fig. 8.9. Urban plan-
ning in Buenos Aires,
for the deceased …
8 Optimal Transportation and Monge–Ampère Equations
144
Fig. 8.10. Urban planning in Quito (Ecuador), or lack of it …
8 Optimal Transportation and Monge–Ampère Equations
145