Магалиф В.Я. Теоретические основы конструирования трубопроводов
Подождите немного. Документ загружается.

18
Ответ оказался достаточно простым. Разветвленный пространственный
трубопровод на рисунке 10 имеет всего одно неподвижное закрепление в точке A . Все
остальные концы: B, C, D, E, F – заданы свободными, что со всей очевидностью не
соответствует действительности. Шарнирно неподвижная опора в точке А создает
поворотную ось, благодаря которой вся система становится кинематически подвижной:
например, возможен поворот всего трубопровода как жесткого тела вокруг оси ВС
(пружинные подвески перемещениям в горизонтальной плоскости не препятствуют, если
их тяги достаточно длинные).
При создании расчетной модели пользователь сосредоточился на правильной
геометрии, работе упругих опор и совсем забыл про условия закрепления на концах. Для
того чтобы избежать подобных ошибок, нужно всегда сначала проанализировать упругую
работу реального трубопровода при нагреве, памятуя о том, что его концевые точки, как
правило, являются местами неподвижного закрепления. И только потом приступать к
составлению расчетной модели! В рассмотренном примере получилось все наоборот.
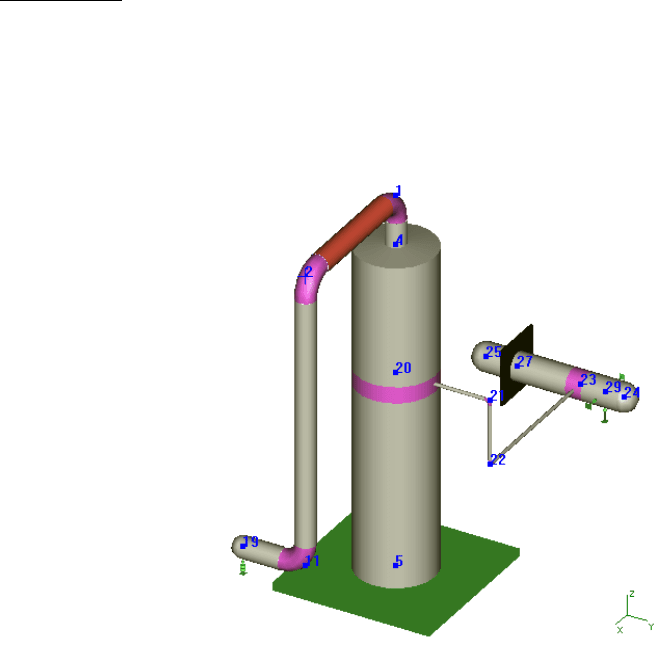
Пример 6. Расчетная модель, в которой цилиндрические аппараты заданы как
участки трубопровода (рис. 12). Использовать такую расчетную модель можно только для
определения перемещений в точках примыкания трубопровода к аппаратам. Для других
целей ее использовать нельзя.
Рис. 12. Вариант совместного расчета трубопровода с аппаратами,
моделируемыми как трубы большого диаметра
.
19
Во-первых, гибкость аппаратов во много раз ниже, чем у трубопроводов. По
отношению к трубопроводу аппарат обычно ведет себя как жесткое неподвижно
закрепленное тело.
Во-вторых локальные напряжения в местах примыкания трубопровода к аппарату,
как правило, рассчитываются на основании теории оболочек (учитывается местная
податливость стенки аппарата). Стержневая модель такой возможности не дает. Как
следствие, при определении усилий в точке 4 не может быть учтена податливость крышки
аппарата, а при расчете мест примыкания трубопровода к аппаратам в точках 20 и 23 в
ПС Старт реализована модель тройникового соединения, которая несправедлива, когда
диаметр магистрали в десятки раз превышает диаметр ответвления (в примере диаметр
трубопровода от точки 20 до точки 23 108 мм, а аппаратов – соответственно 2500 и 850
мм).
В-третьих, в результате расчета нельзя получить нагрузки от трубопровода на
штуцера аппаратов. Вместо них в таблице результатов «Нагрузки на опоры и
строительные конструкции» будут выданы нагрузки на мертвые опоры в точках 5 и 27.
Эти нагрузки интересуют строителей, но не конструкторов аппаратов. Конечно, для
определения нагрузок на штуцера можно использовать таблицу результатов «Усилия в
трубопроводе», но объем ручной работы здесь может получиться достаточно большим.
Трубопровод надо рассчитывать отдельно от аппарата, а место примыкания к
аппарату задавать как крепление на его конце. В нашем примере лучше всего
моделировать крепление мертвой концевой опорой со смещением от нагрева.
6. Правила задания ин
формации по расчетным участкам и
трубопроводным деталям
Если в начало расчетного участка (определяется направлением обхода) поместить
прямоугольную систему координат, то положение участка в пространстве может
задаваться несколькими способами (таблица 2):
1. Тремя проекциями на оси OX, OY и OZ. Проекции на положительное
направление оси имеют знак «+», а на отрицательное направление оси - знак «–». Это
наиболее распространенный способ, использу
емый для трубопроводов сложной
конфигурации.
2. Длиной участка и тремя острыми углами, которые он образует с осями OX,
OY и OZ . Каждый острый угол с положительным направлением оси задается со знаком
«+», а с отрицательным направлением оси – со знаком «–». Достаточно иметь два угла,
третий вычисляется компьютером, но для него нужно задать направление
соответствующей полуоси (плюс или минус). Способ удобен при вводе информации по

20
наклонным участкам не параллельным координатным осям OX, OY и OZ, а также для
протяженных трасс, имеющих ограниченное количество разветвлений и углов поворота.
3. Проекциями участка на горизонтальную плоскость OXY и на вертикальную
ось OZ (величиной опуска или подъема) и двумя острыми углами в горизонтальной
плоскости с осями OX, OY
*
. Способ получил широкое распространение при трассировке
магистральных трубопроводов.
Таблица 2
Способы задания расчетного участка
Система
координат
Название в
экранном
меню
Расчетный участок длиной
L
Что
задается
Примечание
Проекции
L , L ,
L
z
x y
Сфера
L,
γ
x
, γ
y
, γ
z
Достаточно
задать два
любых угла
γ
i
и знак
(плюс или
минус) для
третьего
Цилиндр
L
xy
, L
z
,
γ
x
,
γ
y
,
Достаточно
задать
любой из
двух углов
γ
i
Z
В экранном меню первый способ сокращенно называется «проекции», второй
«сфера», а третий «цилиндр». В процессе описания расчетной модели можно для разных
участков использовать все три способа.
*
в программе один угол задается, а другой определяется автоматически
X
L
z
L
Y
0
L
L
Z
X
Y
γ
x
γ
y
γ
z
L
0
Z
Y
X
γ
y
0
γ
x
L
z
L
L
x
21
Детали трубопровода в расчетной модели привязываются к точкам (узлам) в
соответствие с правилами, приведенными в таблице 3. Каждая такая точка (за
исключением конечной) представляет собой место соединения стержней. Характерные
размеры деталей L используются для правильного построения геометрии, а в отдельных
случаях - для уточнения расчетной модели. Например, если на свободном конце
трубопровода не поставить заглушку, то будет учтена реактивная сила от истечения струи.
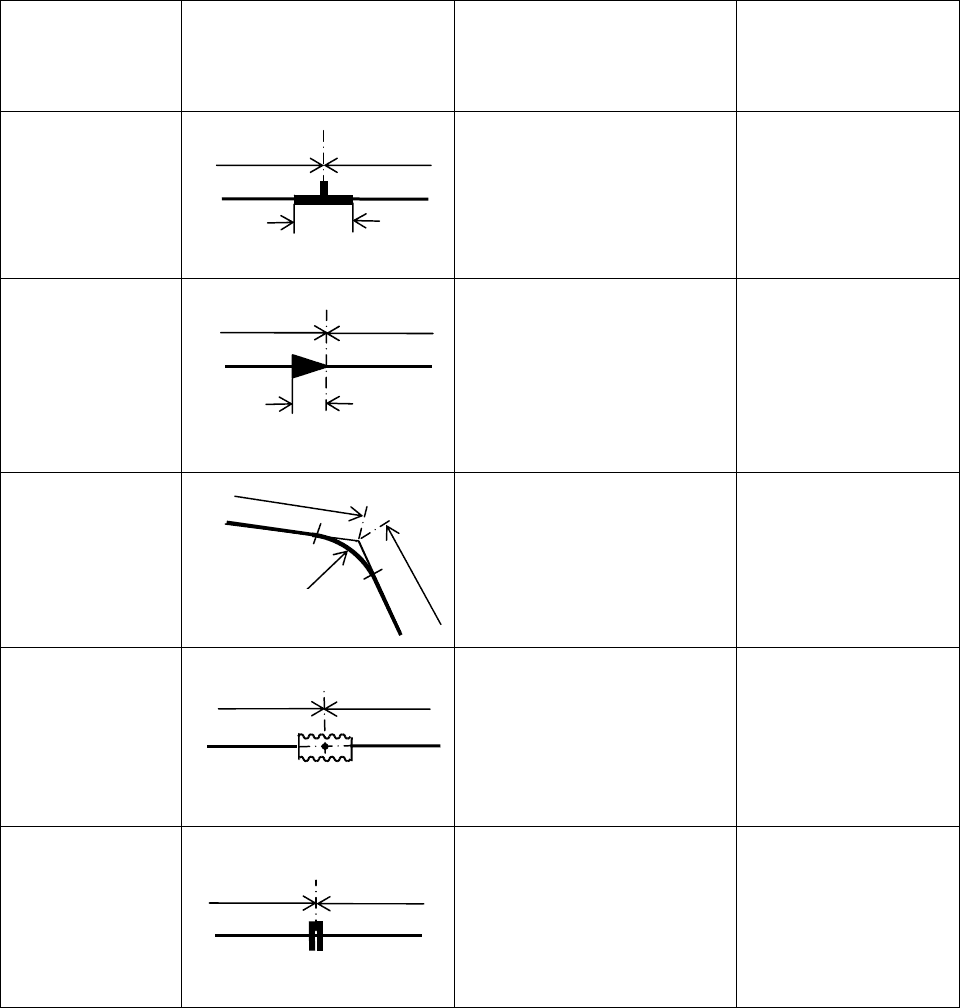
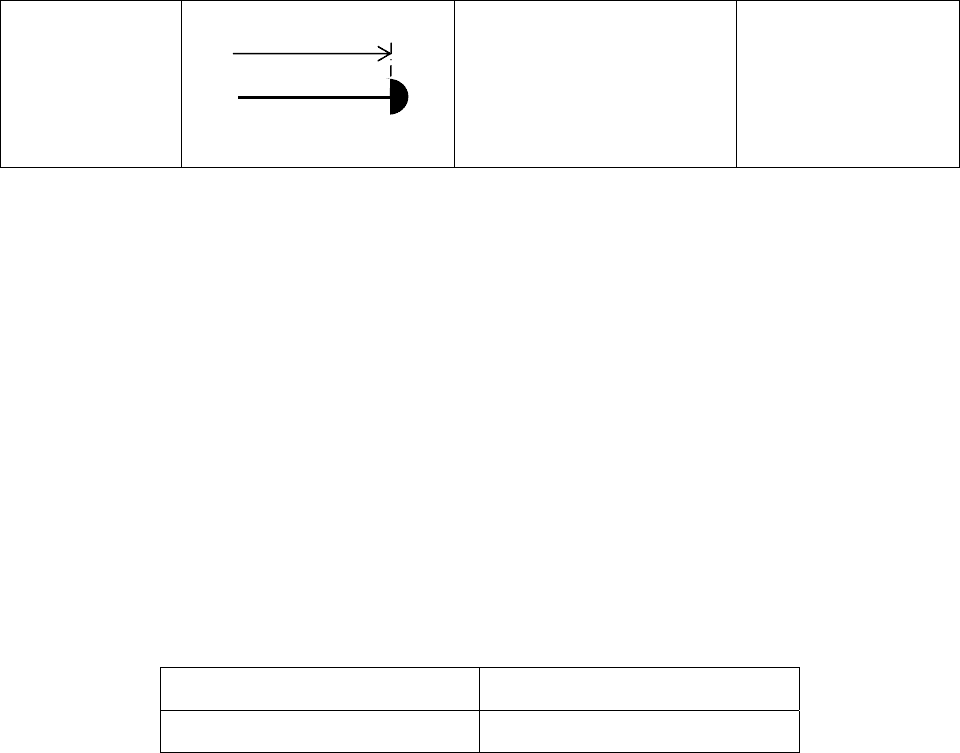
Таблица 3
Правила задания информации по деталям
Деталь
Схема привязки
Местоположение
на схеме
трубопровода и
характерный размер
Примечание
Тройник
Точка на оси
трубопровода,
расположенная в
середине магистрали
тройника, длина
магистрали тройника L
Длина магистрали
L задается для
более точного
учета веса
тройника
Переход
Точка на оси
трубопровода,
расположенная на стыке
перехода с трубой
меньшего диаметра.
Длина перехода L
задается только
при использовании
в качестве
нормативного
документа СТО
10.001-2009
Отвод
Точка пересечения осей
примыкающих к отводу
прямых участков, радиус
отвода
Компенсатор
Точка на оси
трубопровода,
расположенная в
середине компенсатора
(осевого, углового или
сдвигового)
Фланцевое
соединение
Точка, расположенная в
месте пересечения оси
трубопровода с
плоскостью фланцевого
разъема
Используется для
правильного учета
веса фланцевого
соединения
L
L
R
22
Заглушка
Концевая точка на оси
трубопровода. При
наличии в этой точке
опоры (в том числе и
нестандартной) ставится
автоматически
Используется для
правильного учета
распорного усилия
от внутреннего
давления
7. Класс решаемых задач по ПС Старт
Для того чтобы получить картину распределения усилий в стержневой
конструкции сложной структуры, каковым является трубопровод, необходимо решить
систему линейных уравнений достаточно высокого порядка. Неизвестными в такой
системе являются усилия (например, реакции концевых и промежуточных опор) и
перемещения (деформации подвижных сочленений – компенсаторов). Количество
неизвестных усилий определяет степень статической неопределимости конструкции, а
количество неизвестных перемещений – степень ее кинематической неопределимости. По
программной системе рассчитываются трубопроводы, у которых суммарная степень
статической и кинематической неопределимости N составляет [6]:
ПС Старт ПС Старт - Проф
N ≤ 1000 N ≤ 32000
8. Выводы и рекомендации.
Хочется предостеречь от возможного переусложнения расчетных моделей и их
чрезмерной детализации. Наивно полагать, что чем более сложной будет расчетная
модель, тем надежнее и представительней станет получаемый результат. На самом деле
этот результат может быть упущен из-за трудности осмысления и анализа резко
увеличившегося объема результирующих данных.
Чем проще расчетная модель, тем лучше она поддается анализу, тем легче проверить
правильность результатов расчета. Копировать реальный чертеж при создании
расчетной модели – грубейшая ошибка!
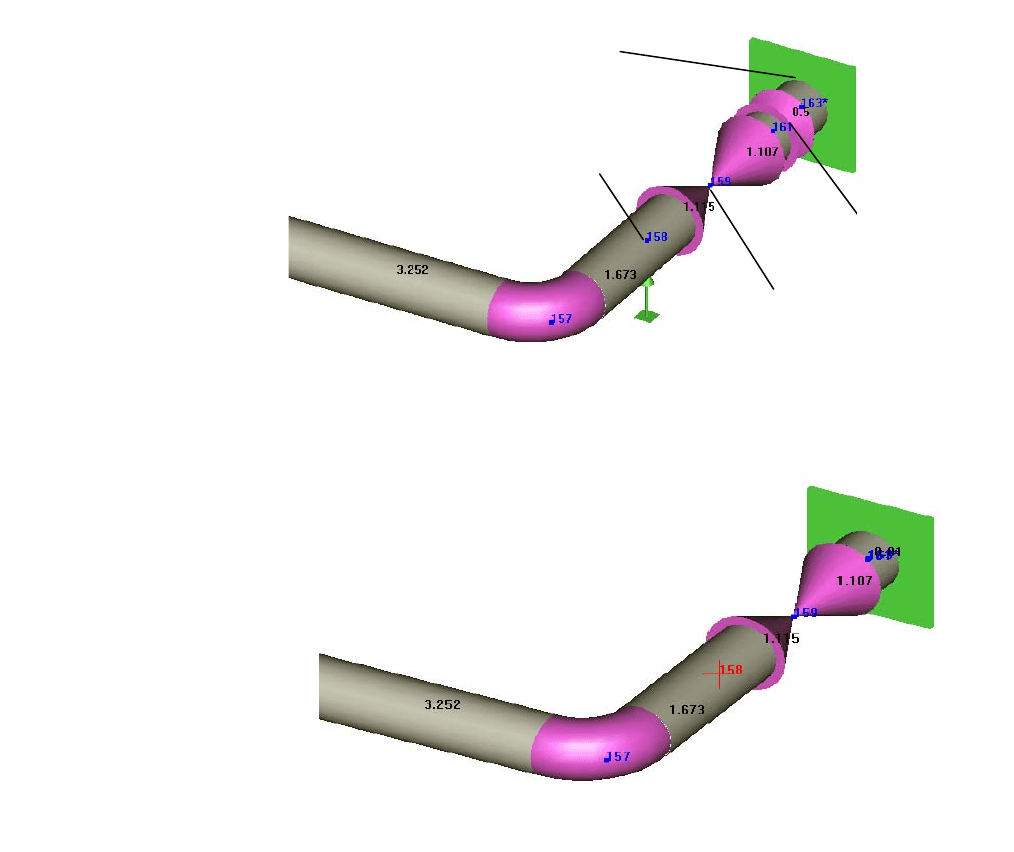
На рисунке 13,а дан пример необоснованного усложнения расчетной модели.
Мертвая опора в сечении 4 является местом примыкания к стенке аппарата листовой
конструкции (цель - с запасом определить нагрузки на аппарат). В сечении 1 задан
фланцевый разъем. Диаметр трубопровода, примыкающего к аппарату 530 мм. В сечении
2 отключающая арматура длиной 1480 мм.
Недостатки такой расчетной модели.
23
1. Непонятно зачем задан участок 1-4 между фланцевым разъемом и стенкой
аппарата. Существуют специальные программы расчета штуцеров аппаратов, в которых в
качестве исходных данных фигурируют нагрузки, передаваемые от трубопровода на
штуцер аппарата в сечении фланцевого разъема, а не в месте примыкания фланца к
стенке аппарата. Поэтому правильное местоположение опоры - в точке пересечения оси
трубопровода с плоскостью фланцевого разъема.
4
3
а)
б)
Рис. 13. Расчетная модель в месте примыкания трубопровода к аппарату
2. В непосредственной близости от фланцевого разъема находится тяжелая
отключающая арматура. Задание опоры в сечении 3 расчетной модели является
излишеством, поскольку бесконечно жесткий участок, примыкающий к мертвой опоре,
служит идеальным решением для восприятия любой нагрузки. То обстоятельство, что эта
1
2

24
опора предназначена для снятия веса со штуцера аппарата, играет существенную роль в
реальной конструкции, а не в расчетной модели.
Корректная расчетная модель после устранения всех перечисленных излишеств
показана на рис. 13,б.
Приведенные примеры и рекомендации носят общий характер и не могут служить
универсальными рецептами на все случаи жизни. Таким образом, применение
программной системы Старт не избавляет специалистов от необходимости много и
серьезно думать над тем, как правильно моделировать работу реальной конструкции.
Важно, чтобы инженер всегда понимал, что осуществляя построение расчетной
модели, он идеализирует конструкцию и всегда должен оценивать адекватность
такой идеализации для решения поставленной задачи.
9. Литература
1. СТО Ростехэкспертиза 10.001-2009 Тепловые сети. Нормы и методы расчета на
прочность, М., 2009,
2. СА 03-003-07 Расчеты на прочность и вибрацию стальных технологических
трубопроводов, Ассоциация «РОСТЕХЭКСПЕРТИЗА», М., 2007,
3. СНиП 2.02.07-85, Нагрузки и воздействия, Госстрой СССР, М., 1985,
4. СНиП 3.05.03-85, Тепловые сети, Госстрой СССР, 1985, М., 1985,
5. СП 41-105-2002, Проектирование и строительство тепловых сетей бесканальной
прокладки из стальных труб с индустриальной тепловой изоляцией из пенополиуретана в
полиэтиленовой оболочке, Госстрой РФ, М., 2003,
6. Программная система «СТАРТ», Расчет прочности и жесткости трубопроводов,
Руководство пользователя, ООО «НТП Трубопровод», М., 2007.

1
Лекция 2
Моделирование работы опор
Оглавление
1. Понятия линейной и угловой связи .................................................................................. 2
2. Связи двухсторонни
е и односторонние............................................................................. 3
3. Закрепление точки в пространстве .................................................................................... 4
4. Подвижная скользящая опора ............................................................................................ 8
5. Неподвижная опора ............................................................................................................. 9
6. Подвижная направляющая опора..................................................................................... 10
7. Подвижная опора с боковыми ограничителями ............................................................. 13
8. Упругие опоры и подвески ............................................................................................... 14
9. Опоры постоянного усилия .............................................................................................. 18
10. Крепление трубопровода к машинам и аппаратам...................................................... 22
11. Модель трубопровода, защемленного в грунте............................................................ 24
12. Конструктивная нелинейность – проблема систем с односторонними связями...... 25
13. Стандартные крепления в ПС Старт.............................................................................. 30
13. Заключение....................................................................................................................... 31
2
1. Понятия линейной и угловой связи
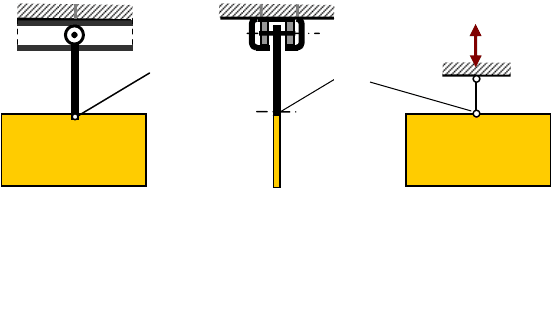
Пусть требуется закрепить твердое тело (на рисунке это листок фанеры) в точке С
от вертикальных перемещений. Прикрепим к потолку коробчатый профиль с продольной
прорезью в нижней части. Вдоль прорези внутри профиля перемещается каток, состоящий
из двух колесиков, ось вращения которых связана с вертикальным стерженьком. Свобод-
ный конец стерженька шарнирно соединяется с точкой С (рис.1а и 1б). Такая конструкция
неподвижно закрепляет тело от перемещений по вертикали как вверх, так и вниз. С теоре-
тической точки зрения это означает закрепление с помощью линейной связи материальной
точки С от перемещений в вертикальной плоскости вверх и вниз (рис. 1в). Линейная связь
представляет собой абсолютно жесткий стерженек с шарнирами по концам. Наличие этих
шарниров свидетельствует о том, что, во-первых, связь не препятствует перемещениям
закрепляемой точки по горизонтали, а во-вторых – что такая связь не препятствует ее угло-
вым перемещениям (кусок фанеры в нашем примере можно свободно повернуть вокруг
точки С). Таким образом, связь препятствует только линейным перемещениям вдоль оси
стерженька.
Для наглядности дальнейшего изложения используем инвентарь, показанный на рис.
1а: кусок фанеры и два гвоздя. Если фанеру прибить к стене одним гвоздем (рис. 2б), при-
чем гвоздь забить не до конца, чтобы обеспечить свободный поворот вокруг его оси, а также
перемещение из плоскости рисунка, то получим расчетную схему, показанную на рисунках
2в и 2г. Две линейные связи можно изображать как взаимно-ортогональные (2в) или имею-
щие общий шарнир в закрепляемой точке (2г), угол между связями в этом варианте изобра-
жения может быть произвольным.
С С
S
z
а) б) в)
Рис.1. Закрепление точки от линейн
ых
пе
р
еме
щ
ений

3
а)
С
0
Если теперь наложить еще одну связь – угловую, препятствующую повороту, то по-
лучим абсолютно неподвижное («мертвое») закрепление точки. В нашем случае с фанеркой
для этого достаточно вбить рядом второй гвоздь (рис. 2д). При этом получается теоретиче-
ская конструкция из двух линейных связей и одной угловой, варианты изображения кото-
рой даны на рисунке 2е и 2ж. Спаренные линейные связи с плечом b (рис. 2е) представля-
ют собой угловую связь, при анализе линейных перемещений эта пара связей должна рас-
сматриваться как одна линейная. В случае, когда линейные связи изображаются наклонны-
ми с общим шарниром (рис.2ж), то имеются в виду связи 1,2 и 3, выделенные красным
цветом. В дальнейшем именно так мы будем моделировать комбинацию линейной и угло-
вой связи.
2. Связи двухсторонние и односторонние
Накладываемые на закрепляемую точку связи могут быть двухсторонними и одно-
сторонними. Например, вертикальная линейная связь будет двухсторонней, если она пре-
пятствует перемещению точки С по вертикали как вверх, так и вниз (рис. 1), а угловая в
вертикальной плоскости – когда она препятствует повороту в этой плоскости как по часо-
вой, так и против часовой стрелки (рис. 2ж). Все связи, которые были рассмотрены выше,
были двухсторонними.
Нередки случаи, когда связь препятствует перемещению только в одну сторону и
не препятствует - в другую. Такая связь называется односторонней.
С
С
б) в)
д) е)
b
С
С
b
Рис.2. Неподвижное закрепление тела на
плоскости
1
2
3
г)
ж)
С
b