Luo A.C.J. (Ed.) Dynamical Systems: Discontinuity, Stochasticity and Time-Delay
Подождите немного. Документ загружается.


258 Y.-J. Zhao et al.
Fig. 21.5 EMD decomposition result of SR output
Figures 21.2 and 21.5 use the same original signal. In Fig. 21.2, we decompose
signal with EMD directly, for the reason of noise the first IMF c
1
is mainly high-
frequency noise component. 30 Hz frequency component is decomposed into IMF
c
2
;c
3
and is distorted. Ten hertz correspondence with c
4
c
6
,forthelowam-
plitude it is hard to detect. Compared with Figs. 21.2 and 21.5, we can conclude
that SR C EMD method is better than only EMD method. For large signal the for-
mer performance is better than the latter and for weak signal only the former can
be detected and decomposed. Otherwise, SR C EMD method can reduce EMD de-
composition’s layer, as shown in figures, there are eight layers in Fig. 21.5 but only
six in Fig. 21.2.
21.5 Conclusion
In order to use EMD decomposition in weak signals under noisy background,
this paper puts forward a new method: using SR as pre-treatment and then per-
forming EMD decomposition. The experiment result proved that this method,
21 Empirical Mode Decomposition Based on Bistable Stochastic Resonance 259
compared with EMD directly, not only improve SNR, enhance weak signals, but
also improve the decomposition performance and reduce the decomposition layers
of signals.
Acknowledgments This work is supported by national 863 project fund Grant # 2007AA04Z414
and National Natural Science Foundation of China Grant # 50675153.
References
1. Huang NE, Shen Z, Long SR, et al (1998) The empirical mode decomposition and the
Hilbert spectrum for nonlinear and non-stationary time series analysis [J]. Proc R Soc Lond
A 454:903–995
2. Huang NE (1996) Computer implicated empirical mode decomposition method, apparatus, and
article of manufacture [P]. U.S. Patent Pending
3. Deng Y (2001) Comment and modification on EMD and Hilbert transform method [J]. Chinese
Sci Bull 46(3):257–263
4. Dai G-P, Liu B (2007) Instantaneous parameters extraction based on wavelet denoising and
EMD [J]. Acta Meteor Sin 28(2):158–162
5. Wang T, Wang Z, Xu Y (2005) Empirical mode decomposition and its engineering applications
based on SVD denoising [J]. J Vib Shock 24(4):96–98
6. Benzi R, Sutera A, Vulpiana A (1981) The mechanism of stochastic resonance. J Phys A
l4(11):L453–L4572
7. Leng Y-G, Wang T-Y, et al (2004) Power spectrum research of twice sampling stochastic reso-
nance response in a bistable system [J]. Acta Phys Sin 53:(3):717–723
8. Leng Y-G, Wang T-Y (2003) Numerical research of twice sampling stochastic resonance for the
detection of a weak signal submerged in a heavy noise [J]. Acta Phys Sin 52(10):2432–2437
9. Leng Y-G (2004) Mechanism analysis of the large signal scale-transformation stochastic reso-
nance and its engineering application study. Papers of PHD, Tianjin University, Tianjin

Chapter 22
Order Reduction of a Two-Span Rotor-Bearing
System Via the Predictor-Corrector
Galerkin Method
Deng-Qing Cao, Jin-Lin Wang, and Wen-Hu Huang
Abstract The predictor-corrector Galerkin method (PCGM) is employed to obtain
a lower order system for a two-span rotor-bearing system. First of all, a 32-DOF
nonlinear dynamic model is established for the system. Then, the predictor-corrector
algorithm based on the Galerkin method is employed to deal with the problem of
order reduction for such a complicated system. The first six modes are chosen to
be the master subsystem and the following six modes are taken to be the slave sub-
system. Finally, the dynamical responses are numerically worked out for the master
and slave subsystems using the PCGM, and the results obtained are used to com-
pare with those obtained by using the SGM. It is shown that the PCGM provides a
considerable increase in accuracy for a little computational cost in comparison with
the SGM in which the first six modes are reserved.
22.1 Introduction
Increasing demands for high performance rotating machinery have made the ro-
tor dynamic problems more and more complex, and more and more attention has
been drawn to the nonlinear dynamics of large-scale rotor-bearing systems. Usu-
ally, a large rotating machine consists of two or more shafts which are rigidly
or flexibly coupled together to form a continuous rotor supported on three or
more hydrodynamic journal bearings. Such a rotating machine is referred to as
a multi-span rotor-bearing system. Up to now, research efforts on dynamics of
multi-span rotor-bearing systems are much fewer than those on single-shaft rotor
systems, e.g., the rigid or flexible Jeffcott rotor. Ding and Krodkiewski [1]and
Krodkiewski et al. [2] proposed a general mathematical model of multi-bearing rotor
systems for the straightforward formulation of an approach for on-site identification
D.-Q. Cao (
)
School of Astronautics, Harbin Institute of Technology, P.O. Box 137,
Harbin 150001, People’s Republic of China
e-mail: dqcao@hit.edu.cn
A.C.J. Luo (ed.), Dynamical Systems: Discontinuity, Stochasticity and Time-Delay,
DOI 10.1007/978-1-4419-5754-2
22,
c
Springer Science+Business Media, LLC 2010
263
264 D.-Q. Cao et al.
of bearing alignment changes during system operation. Based on the approach
proposed in [1, 2], procedures for balancing large multi-bearing rotors have been
established in [3]. Hu et al. [4] designed a test rotor supported on four bearing to val-
idate that the vibration behaviors of statically indeterminate rotor-bearing systems
with hydrodynamic journal bearings are significantly dependent on the relative lat-
eral alignment of bearing housing. The study of Ding and Leung [5] indicated that
the non-synchronous whirls of two flexibly coupled shafts may affect each other. Fi-
nite element method (FEM) and computer simulation technology have been widely
used in designing and analyzing rotor-bearing systems. And in the machine struc-
ture analysis, a refine discretization is usually necessary to obtain a reliable dynamic
model. In this process, a large set of second order differential equations of motion
for the multi-bearing system is established. Additionally, when one or more nonlin-
ear elements such as fluid-bearing, fluid seal, etc., are included in the system, which
is often case, the large order nonlinear systems are usually costly to solve in terms of
computer time and storage, especially over long-time intervals. Hence, it is essential
to reduce the order of the large-scale nonlinear dynamic system, and subsequently
to get a lower order dynamic system which is an approximate representative of the
original one.
The traditional order reduction methods, such as the Guyan order reduction
method [6] and standard Galerkin method (SGM) may also be applied to nonlin-
ear dynamic systems. Although the traditional order reduction methods proved to
be efficient in constructing approximate solutions for nonlinear dynamic systems, it
has itself own limitation that accurate results may only be achieved through the in-
clusion of many modes in the reduced order system. If only a few nonlinear elements
exist, the large order system can be reduced using a fixed-interface component mode
synthesis procedure (CMS) [7] in which the degrees of freedom (DOF) associated
with nonlinear elements are retained in the physical coordinates while the linear
subsystem, the DOF of which far exceeds the DOF of the nonlinear subsystem, are
truncated to a few dominant modes. However, if there are complex nonlinear terms
in the system, i.e., the DOF of the nonlinear subsystem is not small enough, the
practicability of fixed-interface CMS is worth of further study.
An ideally order reduction method is sought to provide a reduced order model
that only contains a few modes. In pursuit of the goal, a large dynamical system
is transformed to modal coordinates and split into a master subsystem and a slave
subsystem. Then the nonlinear Galerkin method (NLGM) is developed, in which
a lower order subsystem is constructed by estimating and approximating the slave
subsystem as function of the master subsystem. The approximate relation between
the master subsystem and slave subsystem was given the name of approximate iner-
tial manifolds (AIM) [8–11]. One simple method for constructing the AIM has been
proposed in [11] by ignoring the time derivative term of the slave subsystem. The
AIM can be obtained by iteration. In particular, during numerically integrating the
reduced order system obtained via NLGM, constructing the AIM at each time step is
tedious and very costly. In order to avoid the disadvantage of the NLGM and at the
meantime to improve SGM, Garcia-Archilla et al. [12] proposed a so-called post-
processed Galerkin method (PPGM). The PPGM, which is as simple as the SGM
22 Order Reduction of a Two-Span Rotor-Bearing System 265
and has some advantage of NLGM, has been used to solve the nonlinear dynamics of
shells in [13] and the dissipative equation in fluid dynamics under periodic boundary
conditions [14]. In the application of PPGM, the SGM is used and the AIM only
needs to be calculated when output is required. For the merit and fault of NLGM
and PPGM, we refer to the comments in [15, 16].
For the rotor-bearing system, since the oil film forces are nonlinear functions
of the displacements, the velocities at bearings and the rotating speed of the ro-
tor, the NLGM may be not available due to the limitation on the displacements at
bearings. In fact, by ignoring the time derivative term of the slave subsystem to get
the AIM may overtop the limitation on the displacements. In order to get an or-
der reduction of a large-scale rotor-bearing system, the predictor-corrector Galerkin
method (PCGM) has been proposed in [17] based on the ideals of NLGM and
PPGM. In [17], a large nonlinear dynamical system is split into a master subsystem,
a slave subsystem, and a negligible subsystem. In a general way, the lower modes
whose frequencies are close to the frequencies of external periodic excitations dom-
inate the dynamic behaviors of the large dynamical system, and the corresponding
modes can be chosen to be the so-called master subsystem. In order to save the cal-
culating time, the order of the slave subsystem may be chosen to be the same as the
master subsystem, while the order of the negligible subsystem may far exceed the
order of master subsystem.
A 32-DOF nonlinear dynamic model is established for a two-span rotor-bearing
system in this paper. The predictor-corrector algorithm based on the Galerkin
method is employed to deal with the problem of order reduction for such a com-
plicated system. The first six modes are chosen to be the master subsystem and the
following six modes are taken to be the slave subsystem. The dynamical responses
are numerically worked out for the master and slave subsystems using the PCGM,
and the results obtained are used to compare with those obtained by using the SGM.
It is shown that the PCGM provides a considerable increase in accuracy for a little
computational cost in comparison with the SGM.
22.2 Modeling of the Two-Span Rotor-Bearing System
Consider a two-span rotor-bearing system as shown in Fig. 22.1. It consists of four
disks and two shafts, which are rigidly coupled together via a coupling. The shaft
is treated as a free-free body and is modeled by FEM based on Euler beam theory.
Each node has four degrees of freedom. On the free-free rotor, all external forces can
be applied, no matter whether they are linear or nonlinear, static or time-dependent.
The dynamic responses of the two-span rotor-bearing system are governed by the
following differential equations of motion.
M Rz C DPz C Kz D f.z; Pz;t/ D f
n
.z; Pz/ C f
e
.t/ C g; (22.1)
where M; C; K 2 R
3232
are the mass, damping, and stiffness matrices, and
f
n
.z; Pz/; f
e
.t/; g 2 R
32
are the nonlinear fluid film force, unbalance force, and

266 D.-Q. Cao et al.
Fig. 22.1 The sketch of the two-span rotor-bearing system
gravitational force vectors, respectively. The short bearing model [18]isemployed
to describe the fluid film forces at four bearings. The displacement vector is
z D Œx
1
;y
1
; ˇ
1
;
1
;x
2
;y
2
; ˇ
2
;
2
;:::;x
r
;y
r
; ˇ
r
;
r
T
2 R
32
;
where r is the number of nodes, x
i
;y
i
,andˇ
i
;
i
are the lateral displacements
and rotation angles of the ith nodal point along the horizontal and vertical direction,
respectively. The m
s
.s D 1; 2; 3; 4/ is the mass of the sth disk, e
s
is the eccentricity
of the sth disk, and J
s
is the transverse moment of inertia of the sth disk as shown
in Fig. 22.1.
22.3 The Predictor-Corrector Galerkin Method
The original system described by (22.1) can be split into three parts by the modes
of the linearized part of (22.1), i.e., a master subsystem, a slave subsystem, and a
negligible subsystem. To do this, the solution z isassumedtobeintheform
z D „ D ˆ
m
C ‰
s
C Z
p
; (22.2)
where DŒ; ;
T
;„DŒˆ
m
;‰
s
; Z
p
;ˆ
m
DŒ'
1
;:::;'
m
;‰
s
DŒ'
mC1
;:::;'
mCs
;
Z
p
D Œ'
mCsC1
;:::;'
mCsCp
,and'
0
i
s are the eigenmodes of the linearized part of
(22.1). Substituting (22.2)into(22.1) and multiplying with „
T
from the left, (22.1)
can be written as
M
R
C C
P
C K D f.„;„
P
;t/; (22.3)
where
M;C and K are the diagonal matrices in which the diagonal elements
respectively are
m
i
D '
T
i
M'
i
; c
i
D '
T
i
C'
i
and k
i
D '
T
i
K'
i
; (22.4)
and the generalized force is
f
i
D '
T
i
f.„;„
P
;t/ for i D 1;2;:::n.
22 Order Reduction of a Two-Span Rotor-Bearing System 267
The matrices M; C; K and the force vector f are rearranged in the form.
M D
2
4
M
m
00
0
M
s
0
00
M
p
3
5
;
C D
2
4
C
m
00
0
C
s
0
00
C
p
3
5
;
K D
2
4
K
m
00
0
K
s
0
00
K
p
3
5
;
f D
2
4
f
m
f
s
f
p
3
5
:
Then, (22.3) can be rewritten as
M
m
R
C
C
m
P
C
K
m
D f
m
.ˆ
m
C‰
s
CZ
p
; ˆ
m
P
C‰
s
P
CZ
p
P
;t/; (
22.5a)
M
s
R
C
C
s
P
C
K
s
D f
s
.ˆ
m
C‰
s
CZ
p
; ˆ
m
P
C‰
s
P
CZ
p
P
;t/; (
22.5b)
M
p
R
C
C
p
P
C
K
p
D f
p
.ˆ
m
C‰
s
CZ
p
; ˆ
m
P
C‰
s
P
CZ
p
P
;t/: (
22.5c)
The excitation frequency of the rotor is far from the higher modes, the contribution
of higher modes is considered to be insignificant. Thus, by neglecting (22.5c)or
setting D 0, the entire system is approximated by
M
m
R
C
C
m
P
C
K
m
D f
m
.ˆ
m
C ‰
p
;ˆ
m
P
C ‰
p
P
;t/; (22.6a)
M
p
R
C
C
p
P
C
K
p
D f
p
.ˆ
m
C ‰
p
;ˆ
m
P
C ‰
p
P
;t/: (22.6b)
In the process of numerical integration of the system, the refined calculation of the
master subsystem is necessary. Equation (22.6b) correspondsto the slave subsystem,
for which the solution could be approximately carried out. Therefore, the time step
T for (22.6b) may be chosen as several times as the time step t for (22.6a). The
solving procedures of the PCGM proposed in [17] can be described as
1. Set T D k t (k>1is an integer). .t/;
P
.t/ and .t/;
P
.t/ are assumed
to be known at a given time t.D mT D mkt for an integer m).
2. To calculate the force vector at time t,
(
f
m
.ˆ
m
.t/ C‰
p
.t/; ˆ
m
P
.t/ C‰
p
P
.t/; t/
f
p
.ˆ
m
.t/ C ‰
p
.t/; ˆ
m
P
.t/ C ‰
p
P
.t/; t/
:
3. The dynamic responses .t C T / and
P
.t C T / of the slave subsystem are
predicted by (22.6b) at time t C T . Then, the dynamic response of the slave
subsystem at time t C j t are given by the interpolation method as
8
ˆ
<
ˆ
:
.t C j t/ D .t/ C
j Π.t C T / .t /
k
;
P
.t C j t/ D
P
.t/ C
j
P
.t C T /
P
.t/
k
;
for j D 1;:::;k 1:

268 D.-Q. Cao et al.
4. The dynamic responses .t Cj t/ and .t Cj t/ of the master subsystem
are solved by integration of (22.6a) at time t C j t.Whenj D 1, the force
vector
f
m
has been obtained from the second step; when j>1, the force vector
f
m
is
f
m
.ˆ
m
.t C .j 1/ t/ C ‰
p
.t C .j 1/ t/;
ˆ
m
P
.t C .j 1/ t/ C ‰
p
P
.t C .j 1/ t/; t C .j 1/ t/;
where .t C.j 1/ t/ and
P
.t C.j 1/ t/ are given from the third step.
Up to t C T , the dynamic responses .t C k t/ and
P
.t C k t/ of the
master subsystem are obtained, i.e., .t C T / and
P
.t C T /.
5. To repeat the processes from Step 2 to Step 5, we can get the solution of the
system for next time step T .
22.4 Numerical Results and Discussion
A two-span rotor-bearing model with specific material constants and structural pa-
rameters listed in Table 22.1 is now presented to explore the complicated nonlinear
dynamic behavior of the system. Numerical calculations based on the procedures of
PCGM are carried out. The first six modes are kept as the master subsystem; the
Table 22.1 The geometrical and physical parameters for
the rotor-bearing system
Physical properties Value
L
1
D L
2
=2 D L
3
=3 0.38267 m
L
4
0.25 m
L
5
D L
6
=2 D L
7
=3 0.414 m
m
1
D m
2
50.31 kg
m
3
45.32 kg
m
4
31.63 kg
J
1
D J
2
0:514 kg m
2
J
3
0:416 kg m
2
J
4
0:203 kg m
2
e
1
D e
3
D e
4
3 10
5
m
e
2
4 10
5
m
Journal and shaft radius 0.057 m
Bearing length 0.03 m
Radial clearance 0:2 10
3
m
Dynamic viscosity 0.018 Pa s
Mass density 7; 850 kg=m
3
Young’s modulus 2:06 10
11
N=m
2
Number of elements 7
Number of node (r)8
22 Order Reduction of a Two-Span Rotor-Bearing System 269
slave subsystem consists of the following six modes and the remained modes are
neglected during numerical integration. At the meantime, the SGM with the first
six modes is also selected to reduce the number of DOF. We should note that the
contribution of the slave subsystem is neglected in the integration of SGM.
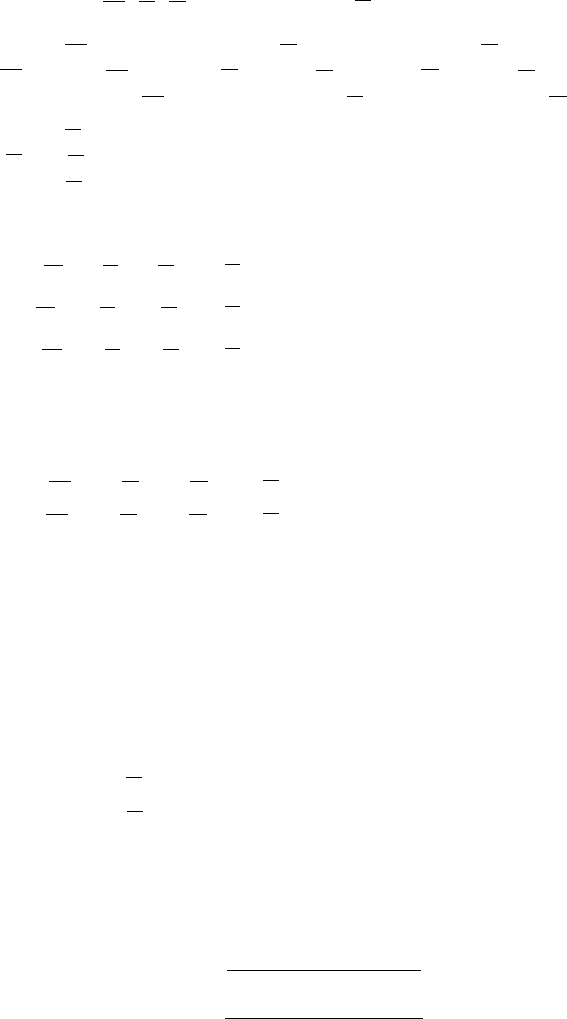
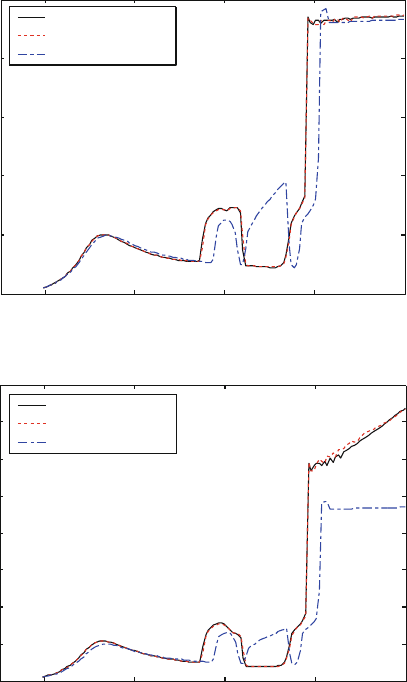
The frequency-response curves of displacements at the first bearing and the
first disk from the left are shown in Fig. 22.2a, b, respectively. It can be ob-
served from Fig. 22.2 that the dynamical responses of the original system and
the PCGM-based reduced system are nearly indistinguishable, whereas the SGM-
based reduced system exhibits an appreciable error after 4,740 rpm (after first order
critical speed), especially the frequency-response curves at the disk as shown in
0 1000 3000 5000 7000 9000
0
0.2
0.4
0.6
0.8
1
Rotational speed [rpm]
Amplitude, x
1
Amplitude, x
2
Original System
PCGM (6+6)
SGM (6-DOF)
a
0 1000 3000 5000 7000 9000
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Rotational speed[rpm]
Original System
PCGM (6+6)
SGM (6-DOF)
b
Fig. 22.2 Comparison of frequency–response curves using different methods: (a) left bearing;
(b) the first disk from the left

270 D.-Q. Cao et al.
0 1000 3000 5000 7000 9000
x
1
x
1
x
1
0 1000 3000 5000 7000 9000
Rotational speed [rpm]
0 1000 3000 5000 7000 9000
Rotational speed [rpm]
Rotational speed [rpm]
−
1
−
0.5
0
0.5
1
−
1
−
0.5
0
0.5
1
−1
−0.5
0
0.5
1
a
b
c
Fig. 22.3 Comparison of bifurcation diagrams for different order reduction methods: (a)the
original system; (b)thePCGM;(c)theSGM
Fig. 22.2b. The first jump phenomenon appears at the rotating speed 4,440 rpm
on the frequency-response curves of both original system and reduced order sys-
tem obtained through PCGM. The jump phenomenon in the reduced order system