Luo A.C.J. (Ed.) Dynamical Systems: Discontinuity, Stochasticity and Time-Delay
Подождите немного. Документ загружается.

182 H. Shang
region of the basin is performed continuously until there is only a trivial point (see
Fig. 15.1l). Accordingly, the change of the topological structure of the safe basin in
Fig. 15.1 confirms that a short delay can reduce but a long delay may aggravate the
fractal erosion of the safe basin.
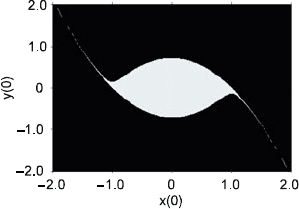
Figure 15.2 shows the change of the boundary and range of the safe basin of
(15.2)whenG D 0:3 and the delay varies. It is drawn in a similar way to Fig. 15.1.
For D 0, the safe basin is not smooth and the range is small as shown in Fig. 15.2a.
With varying from 0 to 13=25 (see Fig. 15.2a–d), the area of the safe basin
increases with delay though the boundary of the safe basin is still not smooth. With
the delay increasing further, the safe basin begins to shrink and the fingers occur
in the boundary (see Fig. 15.2e–h), which suggests the fractal behavior. And such
erosion in the inner region of the basin is performed continuously until there is only
a trivial point as the safe basin (see Fig. 15.2h). Similar to the case for G D 0:1,it
follows from Fig. 15.2 that a small value of the time delay is helpful to enlarge the
safe basin, but a large value provides the opposite action or aggravates the erosion.
15.3 Effects of the Delay on the Area of the Safe Basin
Figures 15.1 and 15.2 indicate that the delay can reduce the erosion or enlarge the
extent of safe basins of (15.2). However, the evolution of safe basins with the delay
is not simple. When the delay is long enough, it can lead to the sudden erosion of
the safe basin. To quantify those phenomena displayed in Figs. 15.1 and 15.2,we
define that the area of the “initial basin” is 100% for c D 0:01; G D 0,and D 0
in (15.2)(seeFig.15.3), since the basin boundary is smooth. Then the change of the
basin area with the amplitude G for the different levels of the delay can be observed
in Fig. 15.4 where c D 0:01; ˝ D 1:0,andG varies from 0 to 0.8.
For A D0:2 (the dashing-dot line in Fig. 15.4), the area of the safe basin with
delayed position feedback control is smaller than that without control. For A D 0:2
(solid lines in Fig. 15.4), the area of the safe basin under delayed position feedback
for a small value of the amplitude is bigger than the uneroded “initial basin,” which
show the erosion of the safe basin is successfully reduced. The area of the safe
basin of the system (15.2) decreases with the increasing of the amplitude under
Fig. 15.3 The initial safe basin

15 Control of Safe Basin by Delayed Feedbacks 183
Area (%)
0.2 0.4 0.6 0.8
5
π
τ
=
0
τ
=
τπ
=
4
5
τπ
=
3
5
τπ
=
25
π
τ
=
G
50
100
150
Fig. 15.4 Variation of the basin area with the increasing the amplitude of the excitation for the
system (15.2) under different values of time delay where A D 0:2 for solid lines and A D0:2
for the dashing-dot line
each different value of the delay. As time delay increases from 0, the basin area is
first enlarged to maximum value and then shrink (see the solid lines D 4=5 and
D ). Besides, the comparison of the solid lines D 0 and D =5 shows that
a small delay can control the basin erosion under different values of G when A is
positive.
When the delay is short, it is worthwhile to expand the delay variable x.t / in
a Taylor series despite occasional warnings [15]. One can write
x.t / D x.t/ Px.t/ C (15.3)
Substituting (15.3)in(15.2), one can obtain that
Px D y;
Py D.c C A/y x C x
3
C G cos t:
(15.4)
The unperturbed system can be expressed as
Px D y;
Py Dx C x
3
;
(15.5)
which is a Hamiltonian system. Then the system has a hetero-clinic orbit to two-
saddle points .1; 0/ and (1, 0), which can be given by
x.t/ D tanh
p
2
2
t; y.t/ D˙
p
2
2
sech
p
2
2
t: (15.6)
184 H. Shang
Obviously, when the feedback gain A is positive, the system (15.4) can be
considered as the system (15.1) with a larger damping. As we know, the increasing
of the damping can reduce the erosion of safe basins [9, 10]. Therefore, one can
explain why the safe basin in (15.2) is enlarged when the delay increases from 0.
Besides, one can also conclude that the safe basin in (15.2) will be eroded when the
feedback gain is negative and the delay increases from 0, which is verified by the
dashing-dot line in Fig. 15.4.
15.4 Conclusions
Some investigation has been made on the evolution of the broaching attracting basin
of a nonlinear yaw equation model of a ship with delayed position feedbacks. The
fourth Runge-Kutta and Monte Carlo methods are employed to observe effects on
safe basins when time delay is considered as the control parameter. For a short delay,
the mechanism of the evolution of safe basin is analyzed. Some important results are
obtained as below:
(a) Similar to the case in ordinary differential system, the increasing of excitation
amplitude can lead to the erosion of the safe basin under delayed position feed-
back control.
(b) The basin area is not a monotonic function of the delay for the delayed position
feedback control.
(c) For negative feedbacks, the increasing of the delay aggravates the erosion of
safe basins. For positive feedbacks, the delay can be indeed used to reduce the
erosion of safe basins. The erosion can be reduced when the delay is short, but
a long time delay makes the erosion more sudden and severe.
(d) The sudden erosion of the safe basin caused by the increasing of the delay in
delayed position feedback controlled system can be ascribed to the hetero-clinic
tangency of the manifolds. It is well known that the hetero-clinic tangency of
the stable and unstable manifolds may yield chaos. The results provide the pos-
sibility to control chaos that occurs in the system.
Acknowledgments This work is supported by Shanghai Municipal Education Commission under
Grant No. YYY08004, Shanghai Leading Academic Discipline Project under Grant No. J51501,
and National Natural Science Foundation of China under Grant No. 10902071.
References
1. Freitas M, Viana R, Grebogi C (2003) Erosion of the safe basin for the transversal oscillations
of a suspension bridge. Chaos Solitons Fractals 18(4):829–841
2. Thompson J, Rainey F, Soliman MS (1995) Ship stability criteria based on chaotic transients
from incursive fractals. Philos Trans R Soc Lond A 332(1):149–167
3. Thompson J, McRobie F (1993) Indeterminate bifurcation and the global dynamics
of driven oscillators. In: Proceedings of 1st European nonlinear oscillation’s confer-
ence. Hamburg, Germany
15 Control of Safe Basin by Delayed Feedbacks 185
4. Senjanovic I, Parunov J, Cipric G (1997) Safety analysis of ship rolling in rough sea. Chaos
Solitons Fractals 8(4):659–680
5. Soliman M (1995) Fractal erosion of basins of attraction in coupled nonlinear systems. J Sound
Vib 182(5):729–740
6. Soliman M, Thompson J (1989) Intergrity measures quantifying the erosion of smooth and
fractal basins of attraction. J Sound Vib 35(3):453–475
7. Rega G, Lenci S (2005) Identifying, evaluating, and controlling dynamical integrity measures
in non-linear mechanical oscillators. Nonlinear Anal 63(5–7):902–914
8. Gan C (2005) Noise-induced chaos and safe basin in softening Duffing oscillator. Chaos
Solitons Fractals 25(5):1069–1081
9. Bishop S, Galvanetto U (1993) The influence of ramped forcing on safe basins in a mechanical
oscillator. Dyn Stab Syst 8(2):73–80
10. Moon F, Li G (1985) Fractal basin boundaries and homoclinic orbits for periodic motion in a
two-well potential. Physica Rev Lett 55(14):1439–1442
11. Xu J, Lu Q, Huang K (1996) Controlling erosion of safe basin in nonlinear parametrically
excited systems. Acta Mechanica Sin 12(3):281–288
12. Shang H, Xu J (2008) Multiple periodic solutions in Lienard oscillator with delayed position
feedbacks. J Tongji Univ (Nat Sci) 36(7):962–966
13. Xu J, Chung K (2003) Effects of time delayed position feedback on a van der Pol–Duffing
oscillator. Physica D 180(1–2):17–39
14. Maccari A (2006) Vibration control for parametrically excited Li´enard systems. Nonlinear
Mech 41(1):146–155
15. Driver D (1977) Ordinary and delay differential equations. Springer, New York
Part III
Switching and Stochastic
Dynamical Systems
Chapter 16
On Periodic Flows of a 3-D Switching System
with Many Subsystems
Albert C.J. Luo and Yang Wang
Abstract In this chapter, the stability and bifurcation of periodic flows in a
switching system of multiple subsystems with transport laws at switching points
is presented. The periodic flows and stability for linear switching systems are
discussed as an example. Analytical prediction of the periodic flow in such lin-
ear switching systems is carried out and parameter maps of stability are given.
The methodology presented in this chapter can be applied to nonlinear switching
systems. The further results on chaos, stability, and bifurcation of periodic flows in
nonlinear switching systems will be presented in sequel.
16.1 Introduction
Consider a C
r
i
-continuous system (r
i
>1) on an open domain D
i
R
n
,inthe
time interval t 2 Œt
k1
;t
k
P
x
.i/
D F
.i/
x
.i/
;t;p
.i/
2 R
n
I x
.i/
D
x
.i/
1
; x
.i/
2
;:::;x
.i/
n
T
2 D
i
: (16.1)
The time is t and
P
x
.i/
D dx
.i/
=dt. p
.i/
D
p
.i/
1
;p
.i/
2
;:::;p
.i/
m
i
T
2 R
m
i
is a
parameter vector. On the domain D
i
R
n
, the vector field F
.i/
P
x
.i/
;t;p
.i/
with
the parameter vector p
.i/
is C
r
i
-continuous in x
.i/
for time interval t 2 Œt
k1
;t
k
.
With an initial condition x
.i/
.t
k1
/ D x
.i/
k1
, the dynamical system in (16.1)
possesses a continuous flow as
x
.i/
.t/ D ˆ
.i/
x
.i/
k1
;t;p
.i/
I x
.i/
k1
D ˆ
.i/
x
.i/
k1
;t
k1
; p
.i/
: (16.2)
A.C.J. Luo (
)
Department of Mechanical and Industrial Engineering, Southern Illinois University Edwardsville,
Edwardsville, IL62026-1805, USA
e-mail: aluo@siue.edu
A.C.J. Luo (ed.), Dynamical Systems: Discontinuity, Stochasticity and Time-Delay,
DOI 10.1007/978-1-4419-5754-2
16,
c
Springer Science+Business Media, LLC 2010
189
190 A.C.J. Luo and Y. Wang
To investigate the switching system consisting of many subsystems, the following
assumptions of the ith subsystem should be held.
(A1)
F
.i/
x
.i/
;t;p
.i/
2 C
r
i
I ˆ
.i/
x
.i/
k
;t;p
.i/
2 C
r
i
C1
Ion D
i
for t 2 Œt
k1
;t
k
;
(16.3)
(A2)
jjF
.i/
jjK
.i/
1
.const/Ijjˆ
.i/
jj K
.i/
2
.const/ on D
i
for t 2 Œt
k1
;t
k
; (16.4)
(A3)
x
.i/
D ˆ
.i/
.t/ … @D
i
for t 2 .t
k1
;t
k
/: (16.5)
(A4) The switching of any two subsystems possesses the time continuity.
To investigate the switching system, a set of dynamical systems in finite time in-
tervals will be introduced first. From such a set of dynamical systems, the dynamical
subsystems in a resultant switching system can be selected.
Definition 1. From dynamical systems in (16.1), a set of dynamical systems on
the open domain D
i
in the time interval t 2 Œt
k1
;t
k
for i D 1;2;:::;mis defined
as
S
D
f
S
i
j
i D 1;2;:::;m
g
; (16.6)
where
S
i
(
P
x
.i/
D F
.i/
x
.i/
;t;p
.i/
2 R
n
ˇ
ˇ
ˇ
ˇ
ˇ
x
.i/
2 D
i
R
n
; p
.i/
2 R
m
i
I
x
.i/
.t
k1
/ D x
.i/
k1
It 2 Œt
k1
;t
k
Ik 2 N
)
:
(16.7)
From Assumptions (A1)–(A3), the subsystem possesses a finite solution in the finite
time interval and such a solution will not reach the corresponding domain boundary.
From the set of subsystems, the corresponding set of solutions for such subsystems
can be defined as follows.
Definition 2. For the ith dynamical subsystems in (16.1), with an initial condition
x
.i/
k1
2 D
i
for k 2 N and, there is a unique solution x
.i/
.t/ D ˆ
.i/
x
.i/
k1
;t;p
.i/
.
For all i D 1;2;:::;m, a set of solutions for the i th subsystem in (16.1) on the open
domain D
i
in the time interval t 2 Œt
k1
;t
k
is defined as
S D
n
‚
.i/
j
i D 1;2;:::;m
o
; (16.8)
where
‚
.i/
n
x
.i/
.t/
ˇ
ˇ
ˇ
x
.i/
.t/ D ˆ
.i/
x
.i/
k1
;t;t
k1
; p
.i/
I t 2 Œt
k1
;t
k
; k 2 N
o
:
(16.9)
16 On Periodic Flows of a 3-D Switching System with Many Subsystems 191
This class of switching systems exists in network systems and control systems [1]
and widely applied to electronic power systems [2]. The survey of such switch-
ing systems can be referred to [3]. To obtain the complex responses of switching
systems, numerical schemes can be developed. For instance, Danca [4]usedan
explicit Euler method to give a numerical integration scheme for switching dynami-
cal systems to obtain approximate numerical solutions. Grune and Kloeden [5]used
the Taylor series scheme to develop a higher order numerical integration scheme to
carry out numerical simulations of switching systems. Gokcek [6] used the Floquet
theory to discuss the stability of switching systems. Indeed, approximate numerical
methods can help one understand the behaviors of switching systems. However, for
the traditional analytical and numerical methods, it is very difficult to handle the
discontinuity for the switching of two systems, and it is impossible to provide an
accurate solution for switching systems. In 2005, Luo [7] developed a local theory
of singularity for such switching systems in order to exactly switch from a subsys-
tem to another subsystem (also, see Luo [8]). In 2008, Luo and Wang [9]presented
a general concept of switching systems to investigate switching dynamics of multi-
ple linear oscillators. With periodic and random piecewise forcing, the solutions of
dynamical oscillation were presented. Periodic motions of switching systems with
vector field switching were investigated. This chapter will apply the methodology
for switching system in Luo and Wang [9] to 3-D switching dynamical systems. The
periodic flow and corresponding stability of the 3-D switching system will be inves-
tigated. The parameter map for the 3-D linear switching systems will be presented
and numerical illustrations for periodic flow will be carried out.
16.2 Methodology for Periodic Flows
To describe the switching of subsystems, consider a switching set for the i th
subsystem to be
†
.i/
D
n
x
.i/
k
ˇ
ˇ
ˇ
x
.i/
k
D x
.i/
.t
k
/; k D 0; 1; 2; : : :
o
: (16.10)
From the solution of the i th subsystem, a mapping P
i
for a time interval Œt
k1
;t
k
is defined as
P
i
W †
.i/
! †
.i/
or P
i
W x
.i/
k1
! x
.i/
k
for i D 1;2;:::;m: (16.11)
Define a time difference parameter for the ith subsystem for time interval Œt
k1
;t
k
˛
.i/
k
D t
k
t
k1
(16.12)
which is set arbitrarily. For simplicity, introduce two vectors herein
f
.i/
D
f
.i/
1
;f
.i/
2
; f
.i/
m
T
I x
.i/
D
x
.i/
1
;x
.i/
2
;:::;x
.i/
m
T
: (16.13)
192 A.C.J. Luo and Y. Wang
From the solution in (16.9)fortheith subsystem, the foregoing equation gives for
(i D 1;2;:::;m)
f
.i/
x
.i/
k
; x
.i/
k1
D x
.i/
k
ˆ
.i/
x
.i/
k1
;t
k
;t
k1
; p
.i/
D 0: (16.14)
Suppose the two trajectories of the ith and j th subsystems in phase space at the
switching time t
k
is continuous, i.e., for i; j 2f1;2;:::;mgat time t
k
,
x
.j /
k
D x
.i/
k
or
x
.i/
1;k
;:::;x
.i/
m;k
D
x
.j /
1;k
;:::;x
.j /
m;k
(
16.15)
If the two solutions of the i th and j th subsystems at the switching time t
k
are dis-
continuous, for instance, an impulsive system needs a transport law. From Luo [2],
a vector for the transport law is introduced as
g
.ij/
D
g
.ij/
1
;g
.ij/
2
;:::;g
.ij/
m
T
(16.16)
so the transport law between the ith and j th subsystems can be written as
g
.ij/
x
.i/
k
; x
.j /
k
D 0 at time t
k
: (16.17)
In other words, one obtains
x
.j /
1.k/
D g
.ij/
1
x
.i/
1.k/
;:::;x
.i/
m.k/
;x
.j /
2.k/
D g
.ij/
2
x
.i/
1.k/
;:::;x
.i/
m.k/
;
x
.j /
m.k/
D g
.ij/
m
x
.i/
1.k/
;:::;x
.i/
m.k/
; for i;j 2f1;2;:::;mg:
9
>
>
=
>
>
;
: (16.18)
From the transport law, a transport mapping is introduced as for i; j 2f1;2;:::;mg
P
.ij/
0
W †
.i/
! †
.j /
; (16.19)
i.e.,
P
.ij/
0
Wx
.i/
k
!x
.j /
k
or P
.ij /
0
W
x
.i/
1.k/
;:::;x
.i/
m.k/
!
x
.j /
1.k/
;:::;x
.j /
m.k/
:(16.20)
P D P
.l
n
l
nC1
/
0
ı P
l
n
ııP
l
2
ı P
.l
1
l
2
/
0
ı P
l
1
P
l
n
:::l
2
l
1
(16.21)
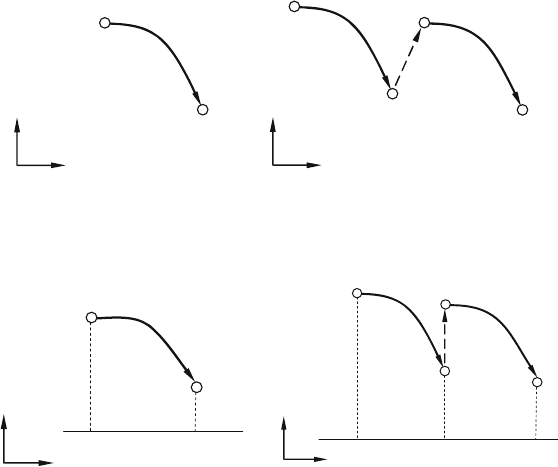
The algebraic equations for the transport mapping are given in (16.18). The mapping
P
i
for the ith subsystem for time t 2 Œt
k1
;t
k
and the transport mapping at time
t D t
k
are sketched in Figs. 16.1 and 16.2. The initial and final points of mapping P
i
are x
.i/
k1
and x
.i/
k
. Similarly, the initial and final points of mapping P
j
are x
.j /
k
and
x
.j /
kC1
. The mappings relative to the subsystem are sketched by a solid curve. The
two mappings are connected by a transport mapping at t D t
k
, which is depicted
16 On Periodic Flows of a 3-D Switching System with Many Subsystems 193
a
x
n
2
x
n
2
x
n
1
x
n
1
x
k
−
1
i
P
P
i
P
j
(ij)
P
0
b
(i )
x
k
−
1
(i )
x
k
+
1
( j)
x
k
+
1
( j)
x
k
x
k
(i )
Fig. 16.1 (a) Mapping P
i
and (b) transport mapping P
.ij/
0
in phase plane (n
1
Cn
2
D n)
a
b
t
x
(i)
x
k
−
1
(i)
x
k
−
1
( j)
x
k
( j)
x
k
+
1
(i)
x
k
(i)
x
k
P
i
P
i
t
k
−
1
t
k
−
1
t
k
+
1
t
k
t
k
t
x
P
j
(ij)
P
0
Fig. 16.2 (a) Mapping P
i
and (b) transport mapping P
.ij/
0
in the time history
by the dashed line. In phase plane, there is a nonnegative distance governed by
(16.17). However, the time-history of flows for the switching system experiences a
jump at time t D t
k
. If the transport law gives a special case to satisfy (16.14), the
solutions of two subsystems are C
0
-continuous at the switching time t D t
k
.The
jump phenomenon will disappear. Consider a flow of the resultant switching system
to have a mapping structure for t 2[
n
j D1
t
kCj 1
;t
kCj
as where
P
l
k
2
f
P
i
j
i D 1;2;:::;n
g
: (16.22)
Consider an initial state x
.l
1
/
k
D
x
.l
1
/
1.k/
;:::;x
.l
1
/
m.k/
T
at t D t
k
and final state
x
.l
nC1
/
kCn
D
x
.l
nC1
/
1.kCn/
;:::;x
.l
nC1
/
m.kCn/
T
at t D t
kCn
, respectively.
x
.l
nC1
/
kCn
D P x
.l
1
/
k
D P
.l
n
l
nC1
/
0
ı P
l
n
ııP
l
2
ı P
.l
1
l
2
/
0
ı P
l
1
x
.l
1
/
k
: (16.23)
with each time difference, one has the total time difference
t
kCn
t
k
D
X
n
mD1
˛
.l
m
/
kCm
: (16.24)