Lopez de Lacalle L.N., Lamikiz A. Machine Tools for High Performance Machining
Подождите немного. Документ загружается.

2 New Concepts for Structural Components 71
Similar to the previous case, the percentage increase in damping is directly trans-
lated to an increase of the same percentage in the critical depth of cut. Therefore, it is
possible to reduce the machine stiffness by a specific percentage, with its subse-
quent associated reduction of mass, maintaining the productivity of the machine.
The three approaches are summarised in Table 2.8, which provides an overview
of the influence of the mass, stiffness and damping variation on the natural fre-
quency, the static deflection and the maximum dynamic amplification.
Given the fact that the damping variation approach increases the productivity of
the machines without a penalisation of mass, the method of active damping will be
analysed thoroughly here.
2.6.2 The Influence of ADDs on Productivity
The influence of material damping is low on the total damping of a machine.
Thus, in the case that a higher amount of damping is required to further increase
the productivity of the machine, ADDs are an interesting option.
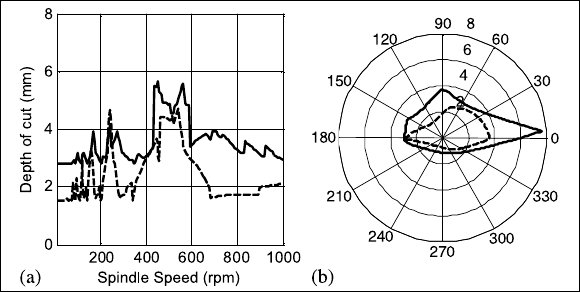
Figure 2.16 shows the influence of having placed the two ADD-45 of Micro-
mega
®
shown in Fig. 2.11 in the direction X of an actual horizontal milling ma-
chine. As can be seen, the additional damping that these two actuators have added
to structural modes has allowed a move in the critical depth of cut in all cutting
directions, (the effect being especially high in the direction in which the actuators
were placed). As a result, it can be seen in the diagram in Fig. 2.16a, that the
critical depth of cut in direction X (0º in the polar diagram) has passed from the
initial 1.7
mm (dashed line) to almost 8
mm (continuous line). The introduction of
damping can be extended to the rest of the directions by placing additional ADDs
on the ram of the machine.
Fig. 2.16 Effect of active damping on stability lobes. a Feed in Y+ direction. b Polar plot of the
critical depth of cut at every direction
72 J. Zulaika and F. J. Campa
2.7 Future Trends in Structural Components for Machines
The main trend in the field of structural components is the de-materialisation of
their structural components, passing from stiffness-aiming machines to lightweight
and robust machines, as seen in Fig. 2.17. This can be tackled mainly by integrat-
ing in the structural components active elements such as active piezo-layers, active
damping devices and magneto-rheological fluids. In fact, these ubiquitous sensors
and actuators will allow the passing from current machine conceptions based on
mechanical stiffness to innovative machine conceptions based on mechatronic
robustness, similar to axes levitating on magnetic bearings, which show a precise
and robust behaviour despite not having any mechanical support.
Fig. 2.17 Prototype with structural parts made with ball-bars frame, by Fatronik
®
Finally, current machine specifications are defined as a trade-off between pro-
ductivity, accuracy and surface quality. Within a view of sustainable machine
tools and processes, this chapter has introduced a new triangle of specifications
based on productivity, accuracy and above all, eco-efficiency.
Acknowledgements Thanks are addressed to Rubén Ansola for his contributions on the topo-
logical optimisation of structural components. Thanks are also addressed for the financial support
of the Ministry of Education and Research of Spain (DPI2007-60624).
References
[1] ADD Catalogue (www.micromega-dynamics.com)
[2] Ansola R, Veguería E, Canales J, Tárrago JA (2007) A simple evolutionary topology opti-
mization procedure for compliant mechanism design, Fin Elem Anal Design, 44:53–62
2 New Concepts for Structural Components 73
[3] López de Lacalle LN, Lamikiz, A, Sánchez. JA, Salgado MA (2007) Toolpath selection
based on the minimum deflection cutting forces in the programming of complex surfaces
milling, Int J Mach Tool Manufact, 47:388–400
[4] Rivin E. (1999) Stiffness and Damping in Mechanical Design, Marcel Dekker Inc.
[5] Slocum A (1992) Precision Machine Design, Society of Manufacturing Engineers
[6] Smolik J (2007) High Speed Machining 2007: Sixth International Conference, 21–22 March
2007, San Sebastian (Spain)
[7] Zulaika J (2006) Project NMP2-CT-2005-013989, Internal Report D1.1
75 L. N. López de Lacalle, A. Lamikiz, Machine Tools for High Performance Machining,
© Springer 2009
Chapter 3
Machine Tool Spindles
G. Quintana, J. de Ciurana and F. J. Campa
Abstract This chapter deals with spindle technologies for machine tools. The ma-
chine tool spindle provides the relative motion between the cutting tool and the
workpiece which is necessary to perform a material removal operation. In turning,
it is the physical link between the machine tool structure and the workpiece, while
in processes like milling, drilling or grinding, it links the structure and the cutting
tool. Therefore, the characteristics of the spindle, such as power, speed, stiffness,
bearings, drive methods or thermal properties, amongst others, have a huge impact
on machine tool performance and the quality of the end product. Machining re-
quirements differ greatly from one sector to another in terms of materials, cutting
tools, processes and parameters. Nowadays, the spindle industry provides a large
variety of configurations and options in order to meet the needs of different indus-
tries. Therefore, it is crucial that companies correctly identify their machining
requirements and make well-informed decisions about which spindle to acquire. In
this chapter, some of the main spindle characteristics that are the basis of a well-
informed decision regarding spindles are introduced and discussed.
3.1 Introduction
Machining is applied to a wide range of materials to create a great variety of ge-
ometries and shapes, practically without restrictions on complexity. Typical work-
_
_________________________________
G. Quintana and J. de Ciurana
Department of Mechanical Engineering and Civil Construction, University of Girona,
Escola Politècnica Superior, Av/Lluís Santaló s/n, 17003 Girona, Spain,
{guillem.quintana, quim.ciurana}@udg.edu
F. J. Campa
Department of Mechanical Engineering, University of the Basque Country,
Faculty of Engineering of Bilbao, c/Alameda de Urquijo s/n, 48013 Bilbao, Spain
fran.campa@ehu.es
76 G. Quintana, J. de Ciurana and F. J. Campa
piece materials are: aluminium alloys, cast iron, titanium, austenitic stainless or
hardened steels, copper, carbon graphite and also plastics, woods and plastic com-
posites. Machined components can be either simple forms with planes and round
shapes or complex shapes. Two types of surfaces are usually defined: ruled sur-
faces, (e.g., for blades) and sculptured surfaces or free-form surfaces (e.g., for
moulds and dies). This enormous number of combinations is able to meet the
specific manufacturing requirements of a wide range of manufacturing industries,
such as automotive, aerospace or the die and mould industry.
The machine tool spindle plays an important role in machining operations be-
cause it provides the cutting speed of the tool and is part of the force chain be-
tween the machine tool structure and the tool or the workpiece. The finished prod-
uct is created by removing material from a blank workpiece with a cutting tool
through the relative motion between the tool and the workpiece. The relative mo-
tion can be divided into a feed motion, provided by the drives of the machine, and
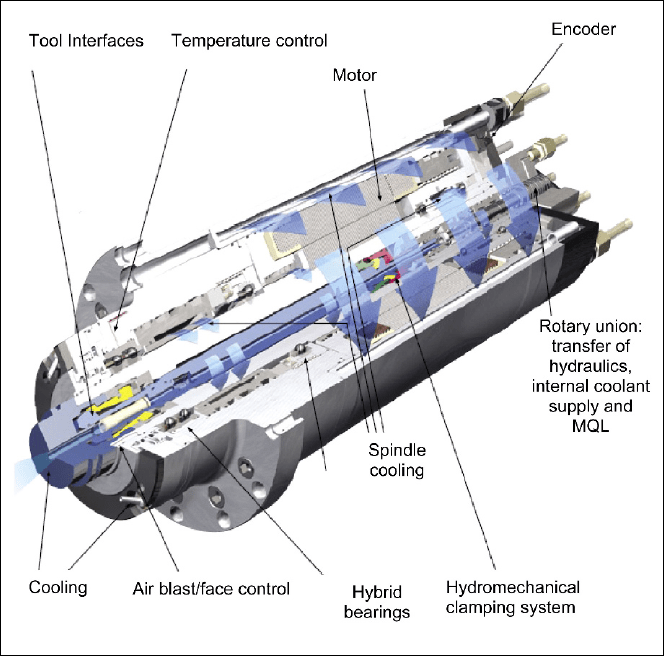
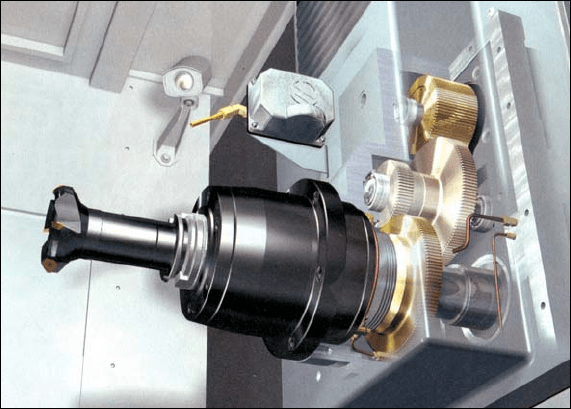
Fig. 3.1 Main parts of a spindle, by Edel
®
3 Machine Tool Spindles 77
a rotating motion provided by the spindle, which is responsible for the cutting
speed that permits the material to be removed.
Each type of machining process (e.g., drilling, turning, milling, grinding, bor-
ing, etc.) has specific characteristics regarding feed rate and cutting speed. In
basic turning processes, the spindle rotates the workpiece to provide the cutting
speed and the cutting tool is fed by the drives to remove material. In drilling and
milling, the spindle rotates a cutting tool with several cutting edges to provide the
cutting speed. In drilling the feed motion moves in the direction of the spindle
axis, and in milling, it generally moves in a perpendicular direction. In grinding
processes, the spindle is also the element that provides the cutting speed to the
grinding wheel.
The characteristic elements of a spindle are the tool interface, the drawbar, the
shaft, the bearings, the driving system, the cooling system and the housing. There
are several types of driving systems, basically with a motor coupled, directly or
indirectly, to the spindle or with an integrated motor. Figure 3.1 shows the main
elements of an integrated motor spindle.
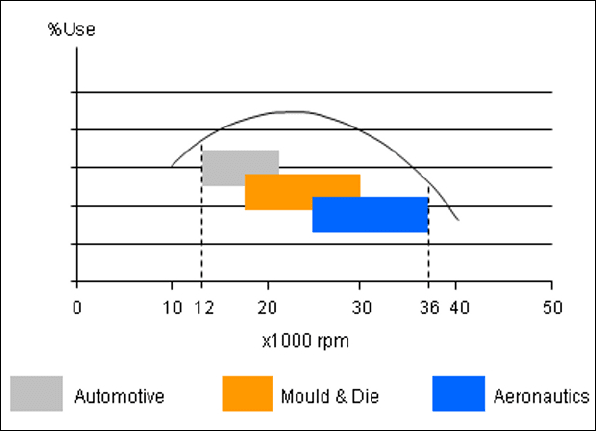
The spindle industry provides many options and configurations to meet the
requirements of each sector. As an example, Fig. 3.2 shows a comparison of the
maximum speeds of the direct drive spindles and electrospindles typically used
in automotive, mould and die, and aeronautical industries. Hence, the selection
of the most suitable spindle is a complex task. In this chapter, spindle features
such as motors, bearings, speed, power, stiffness and thermal behaviour are
described and the basic criteria for a well-informed decision regarding spindles
are presented.
Fig. 3.2 Speed requirements of different sectors for electrospindles
78 G. Quintana, J. de Ciurana and F. J. Campa
3.2 Types of Spindles
The spindle drive is the mechanism that provides and transmits movement to the
spindle. The drive consists of the motor and the coupling. In this way, the speed of
rotation, the torque and the power are finally transferred to the cutting tool, via the
toolholder.
In general, there are four types of spindle depending on the type of drives used,
belt drive, gear drive, direct drive and integrated (built-in) drive. In Chap. 1,
Fig. 1.17 shows an example of the belt drive, the direct drive and the integrated
drive. Various characteristics have to be taken into account to evaluate the per-
formance of spindles, for example:
• Transmission performance in terms of movement, force, torque, power and speed.
• Heat loss and expansion.
• Vibrations at various speeds.
• Noise.
• Others, such as maintenance and cost.
Below we briefly describe the common features of each type of drive and the
most suitable applications for each one.
3.2.1 Belt-driven Spindles
This spindle setup transfers the movement of an external motor to the main spindle
by means of a cogged or V-belt. It is widely used in conventional machining due
to its low cost and good performance when it comes to transferring the nominal
power of the motor into the useful power of the spindle. The efficiency of belt-
driven spindles, in terms of transmitting motor power to the spindle is around
95%. This is a little less efficient than direct drive spindles (nearly 100%) but
clearly better than gear-driven spindles (less than 90%) [4].
A belt-driven spindle can reach moderate speeds (15,000
rpm) and perform
well or with high torque at lower speeds (1,000
rpm), depending on the belts and
the transmission ratio. In contrast, at low speeds, gear drives transmit the torque
better and at high speeds, direct drives are better (above all in situations where
dimensional precision and surface quality requirements are high) because they
produce less vibration and noise. However, as belt drives are very versatile, they
are used for a wide variety of jobs whose requirements range between high
torque/low rotation speeds and low torque/high speeds [10]. The main disadvan-
tages of the belt-driven system are:
• They undergo significant thermal expansion, compared to other drive systems
due to the constant contact of the belt.
• They are noisier due to the movement of the belt.
• The tensioning of the belt makes a radial force on the shaft that takes some of
the available loading capacity of the bearings.
3 Machine Tool Spindles 79
As the motor and spindle are separate, the housing and maintenance of this kind
of drive is simple, although on the other hand, more space is required.
3.2.2 Gear-driven Spindles
Gear-driven spindles (see Fig. 3.3) can reach high torque at low revolutions and
they characteristically have multiple speed ranges.
The gears, however, may cause vibrations which have a negative effect on the
finished surface of the workpiece. In addition, as we mentioned above, they are less
efficient when it comes to converting the nominal power of the motor into the cut-
ting power of the tool, due to its constructive nature. Such power is lost as heat, with
all the negative effects that this creates, such as reduced precision due to thermal
expansion. For all these reasons, gear-driven spindles are unsuitable for very high
velocity machining operations although very adequate for heavy-duty work.
Fig. 3.3 Haas EC-630 gear-driven spindle with two-speed gearbox: 610
ft-lb of torque for heavy
machining or 6,000
rpm for finish cuts, by Haas Automation
®
3.2.3 Direct Drive Spindles
Direct drive spindles have almost 100% efficiency in terms of transmitting power
from the motor to the cutting tool. They can work at high rotation speeds but at lower
torques.
80 G. Quintana, J. de Ciurana and F. J. Campa
Since there is no transmission chain, it is not possible to increase torque me-
chanically in response to reductions in motor speed. This drive system behaves
well in terms of vibrations, which means high speeds can be reached and still
achieve good surface finishing.
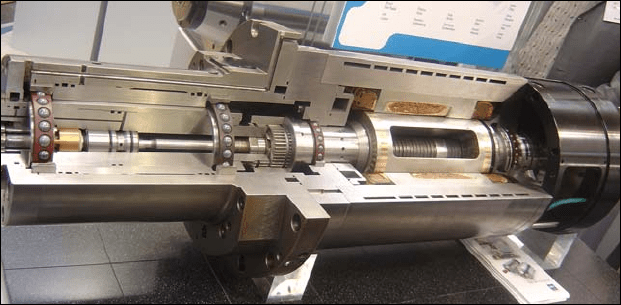
3.2.4 Integrated (Built-in) Drive Spindles
In these spindles, also called electrospindles, the motor can be a synchronous or an
asynchronous electric motor that is integrated into the spindle structure between
the front and rear bearings (see Fig. 3.4). In this way, vibrations and noise are
reduced and work can be carried out at higher rotation speeds, from 15,000
rpm.
This is why integrated spindles are very common in high speed machine tools.
Controlling heat transference within the spindle and the subsequent thermal ex-
pansion is a key factor for getting good performance from this kind of drive. With
the motor inside the housing, the auxiliary system for removing heat is the first
priority (see Sect. 3.5.4).
The great precision required for the assembly of these spindles and the neces-
sity of auxiliary systems for cooling and monitoring, makes them very expensive,
despite their excellent mechanical performance.
Fig. 3.4 Integrated spindle with the motor between the front and rear bearings
3.3 Spindle Configurations
The arrangement of the spindle in the machine tool is an important feature that is,
in fact, related to the versatility and the final applications of the machine tool. We
describe here the usual configurations of the spindle and also some alternatives.
3 Machine Tool Spindles 81
3.3.1 Common Configurations: Vertical and Horizontal Spindles
The arrangement of the spindle depends on the purpose of the machine tool but, as a
general rule, horizontal spindle configurations are used in machines with great
power and palletised workpieces for a greater flexibility (see Fig. 1.23 in Chap. 1).
One of the advantages of this configuration is that the removed chip falls away from
the cutting zone. Otherwise, vertical spindles are generally used in machines with
less power which need more accessibility, typically for machining dies and moulds;
see Fig. 1.25 in Chap. 1. Both configurations can gain accessibility through the use
of indexed angular headstocks, as the Huré-type for horizontal spindles, or the
swivel-type for vertical spindles. These solutions are still widely used and they
allow the tool to be orientated in fixed lockable steps to cut inclined surfaces, which
allows the (five faces) of a cube, i.e., the workpiece, to be machined.
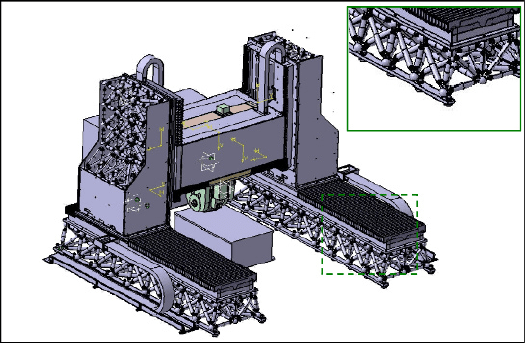
3.3.2 Machines with Rotary Headstocks
Many milling machines incorporate rotating axes in the headstock to provide more
operation possibilities, so that the orientation of the tool can be changed continu-
ously as required by the surface being machined; see Fig. 1.7 in Chap. 1. These
machines, with 5 or more axes, can produce more complex shapes although they
require more sophisticated computer numerical control (CNC) systems in order to
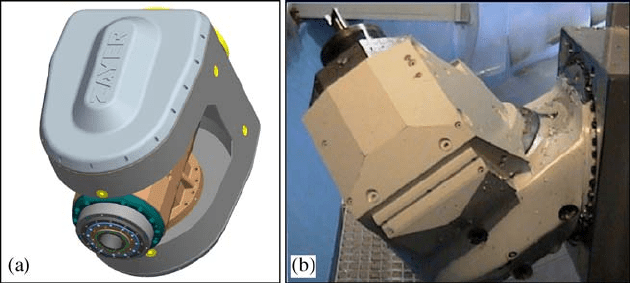
control the direction of the tool according to the trajectories required. Figure 3.5
shows two classic examples of bi-rotary headstocks: the twist head and the swivel
head. The twist head allows higher accessibility and positioning possibilities than
the traditional 3 axis machines. However, these heads lack a high stiffness, so they
are not suitable for high power applications due to their limitations in terms of
accuracy and dynamics. In comparison, the swivel head with its closed design is
a much stiffer solution and more indicated for high power machining.
Fig. 3.5 Two rotary headstocks. a Twist head by Zayer
®
. b Swivel head by Droop
+
Rein
®